当前位置:
X-MOL 学术
›
Spinal Cord Ser. Cases
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
The robotic Trunk-Support-Trainer (TruST) to measure and increase postural workspace during sitting in people with spinal cord injury.
Spinal Cord Series and Cases ( IF 0.7 ) Pub Date : 2020-01-06 , DOI: 10.1038/s41394-019-0245-1 Victor Santamaria 1 , Tatiana Luna 1 , Moiz Khan 2 , Sunil Agrawal 1, 3
Spinal Cord Series and Cases ( IF 0.7 ) Pub Date : 2020-01-06 , DOI: 10.1038/s41394-019-0245-1 Victor Santamaria 1 , Tatiana Luna 1 , Moiz Khan 2 , Sunil Agrawal 1, 3
Affiliation
|
Study design
Cross-sectional study.
Objectives
To measure and expand the sitting workspace of participants with spinal cord injury (SCI) with the Trunk-Support-Trainer (TruST).
Setting
Columbia University.
Methods
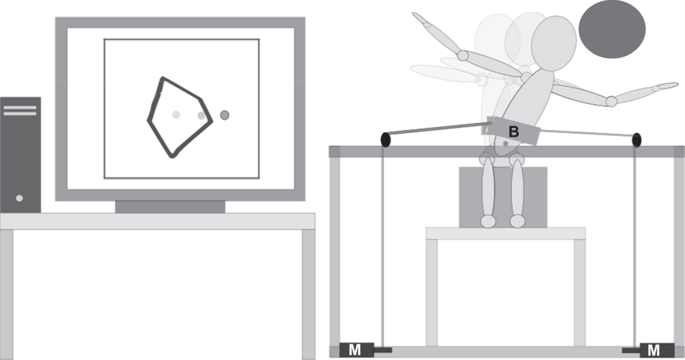
TruST is a motorized-cable belt placed around the torso. Participants performed maximal trunk excursions along eight directions, radiating in a star-shape, to define their seated postural limits and workspace area (cm2). TruST was configured to apply "assist-as-needed" forces when the trunk moved beyond these postural limits. Kinematics were collected to examine trunk control. The clinical features of the sample (n = 5) were documented by neurological injury, dynamometry, the American Spinal Injury Association Impairment Scale, and Spinal Cord Independence Measure-III.
Results
Statistical significance was examined with paired t-tests. TruST successfully recreated the postural limits of participants and expanded their active sitting workspace (Mean: 123.3 ± SE: 42.8 cm2, p < 0.05). Furthermore, participants improved their trunk excursions to posterior (Mean: 5.1 ± SE: 0.8 cm, p < 0.01), right (Mean: 3.1 ± SE: 1.1 cm, p < 0.05), and left (Mean: 5.0 ± SE: 1.7 cm, p = 0.05) directions with TruST-force field.
Conclusions
TruST can accurately define and expand the active seated workspace of people with SCI during volitional trunk movements. The capacity of TruST to deliver continuous force-feedback at the user's postural limits opens new frontiers to implement motor learning-based paradigms to retrain functional sitting in people with SCI.
中文翻译:

机器人躯干支撑训练器 (TruST) 用于测量和增加脊髓损伤患者坐姿时的姿势工作空间。
研究设计横断面研究。目标 使用躯干支撑训练器 (TruST) 测量和扩大脊髓损伤 (SCI) 参与者的坐姿工作空间。设置哥伦比亚大学。方法 TruST 是一种围绕躯干放置的电动电缆带。参与者沿星形辐射的八个方向进行最大躯干偏移,以确定他们的坐姿限制和工作空间面积(cm2)。 TruST 配置为当躯干移动超出这些姿势限制时应用“按需辅助”力。收集运动学来检查躯干控制。通过神经损伤、测力、美国脊柱损伤协会损伤量表和脊髓独立性测量 III 记录样本 (n = 5) 的临床特征。结果通过配对 t 检验检验统计显着性。 TruST 成功地重建了参与者的姿势限制并扩大了他们的活动坐姿工作空间(平均值:123.3 ± SE:42.8 cm2,p < 0.05)。此外,参与者改善了躯干后向偏移(平均值:5.1 ± SE:0.8 cm,p < 0.01)、右侧(平均值:3.1 ± SE:1.1 cm,p < 0.05)和左侧(平均值:5.0 ± SE:1.7) cm, p = 0.05) 方向与 TruST 力场。结论 TruST 可以准确定义和扩大 SCI 患者在躯干意志运动过程中的主动坐姿工作空间。 TruST 在用户姿势极限下提供连续力反馈的能力开辟了新的领域,可以实施基于运动学习的范例来重新训练 SCI 患者的功能性坐姿。
更新日期:2020-01-06
中文翻译:
机器人躯干支撑训练器 (TruST) 用于测量和增加脊髓损伤患者坐姿时的姿势工作空间。
研究设计横断面研究。目标 使用躯干支撑训练器 (TruST) 测量和扩大脊髓损伤 (SCI) 参与者的坐姿工作空间。设置哥伦比亚大学。方法 TruST 是一种围绕躯干放置的电动电缆带。参与者沿星形辐射的八个方向进行最大躯干偏移,以确定他们的坐姿限制和工作空间面积(cm2)。 TruST 配置为当躯干移动超出这些姿势限制时应用“按需辅助”力。收集运动学来检查躯干控制。通过神经损伤、测力、美国脊柱损伤协会损伤量表和脊髓独立性测量 III 记录样本 (n = 5) 的临床特征。结果通过配对 t 检验检验统计显着性。 TruST 成功地重建了参与者的姿势限制并扩大了他们的活动坐姿工作空间(平均值:123.3 ± SE:42.8 cm2,p < 0.05)。此外,参与者改善了躯干后向偏移(平均值:5.1 ± SE:0.8 cm,p < 0.01)、右侧(平均值:3.1 ± SE:1.1 cm,p < 0.05)和左侧(平均值:5.0 ± SE:1.7) cm, p = 0.05) 方向与 TruST 力场。结论 TruST 可以准确定义和扩大 SCI 患者在躯干意志运动过程中的主动坐姿工作空间。 TruST 在用户姿势极限下提供连续力反馈的能力开辟了新的领域,可以实施基于运动学习的范例来重新训练 SCI 患者的功能性坐姿。










































 京公网安备 11010802027423号
京公网安备 11010802027423号