当前位置:
X-MOL 学术
›
Mechatronics
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
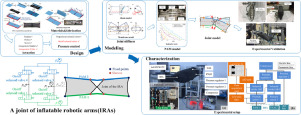
Design, modeling and characterization of a joint for inflatable robotic arms
Mechatronics ( IF 3.1 ) Pub Date : 2020-02-01 , DOI: 10.1016/j.mechatronics.2019.102311 XueAi Li , Kui Sun , Chuangqiang Guo , Teng Liu , Hong Liu
Mechatronics ( IF 3.1 ) Pub Date : 2020-02-01 , DOI: 10.1016/j.mechatronics.2019.102311 XueAi Li , Kui Sun , Chuangqiang Guo , Teng Liu , Hong Liu
|
Abstract This paper investigates the design and modeling of a joint for inflatable robotic arms (IRAs) towards long-range inspection. A primary trade-off design is elaborated in view of materials, fabrication and actuation through the detailed comparison of some existing IRAs. Antagonist pneumatic artificial muscles (PAMs) are selected to actuate each joint that is fabricated from low-cost fabrics or films. A novel static joint model is proposed by taking into account both the stiffness of irregular-shaped inflatable tubes and the nonlinear issue of PAMs, without the need for numerous experiments or computationally expensive algorithms. The proposed modeling approach, which aims to predict joint behaviors analytically, is experimentally validated on two different prototypes. Particularly, the integration of the beam and membrane models is introduced, so that the stiffness model achieves the most accurate prediction with a mean absolute percentage error (MAPE) of 21.60 % as compared to its separate counterparts. Following this, the model-based optimization of the IRA joint is carried out for a further trade-off among its motion range, payload capacity and weight. Experiments on the optimized prototype are conducted to characterize its bending modality and force output, showing the great potential of our method for some specific applications, e.g., disaster inspection, space exploration and domestic assistance.
中文翻译:

充气机械臂关节的设计、建模和表征
摘要 本文研究了用于远程检测的充气机械臂 (IRA) 关节的设计和建模。通过对一些现有 IRA 的详细比较,从材料、制造和驱动的角度阐述了一个主要的权衡设计。选择拮抗剂气动人工肌肉 (PAM) 来驱动由低成本织物或薄膜制成的每个关节。通过考虑不规则形状充气管的刚度和 PAM 的非线性问题,提出了一种新的静态关节模型,无需大量实验或计算成本高的算法。所提出的建模方法旨在分析性地预测关节行为,并在两个不同的原型上进行了实验验证。特别,引入了梁和膜模型的集成,因此刚度模型实现了最准确的预测,与单独的对应模型相比,平均绝对百分比误差 (MAPE) 为 21.60%。在此之后,对 IRA 关节进行基于模型的优化,以进一步权衡其运动范围、有效载荷能力和重量。对优化原型进行实验以表征其弯曲模态和力输出,显示了我们的方法在某些特定应用中的巨大潜力,例如灾难检查、空间探索和国内援助。对 IRA 关节进行基于模型的优化,以进一步权衡其运动范围、有效载荷能力和重量。对优化原型进行实验以表征其弯曲模态和力输出,显示了我们的方法在某些特定应用中的巨大潜力,例如灾难检查、空间探索和国内援助。对 IRA 关节进行基于模型的优化,以进一步权衡其运动范围、有效载荷能力和重量。对优化原型进行实验以表征其弯曲模态和力输出,显示了我们的方法在某些特定应用中的巨大潜力,例如灾难检查、空间探索和国内援助。
更新日期:2020-02-01
中文翻译:
充气机械臂关节的设计、建模和表征
摘要 本文研究了用于远程检测的充气机械臂 (IRA) 关节的设计和建模。通过对一些现有 IRA 的详细比较,从材料、制造和驱动的角度阐述了一个主要的权衡设计。选择拮抗剂气动人工肌肉 (PAM) 来驱动由低成本织物或薄膜制成的每个关节。通过考虑不规则形状充气管的刚度和 PAM 的非线性问题,提出了一种新的静态关节模型,无需大量实验或计算成本高的算法。所提出的建模方法旨在分析性地预测关节行为,并在两个不同的原型上进行了实验验证。特别,引入了梁和膜模型的集成,因此刚度模型实现了最准确的预测,与单独的对应模型相比,平均绝对百分比误差 (MAPE) 为 21.60%。在此之后,对 IRA 关节进行基于模型的优化,以进一步权衡其运动范围、有效载荷能力和重量。对优化原型进行实验以表征其弯曲模态和力输出,显示了我们的方法在某些特定应用中的巨大潜力,例如灾难检查、空间探索和国内援助。对 IRA 关节进行基于模型的优化,以进一步权衡其运动范围、有效载荷能力和重量。对优化原型进行实验以表征其弯曲模态和力输出,显示了我们的方法在某些特定应用中的巨大潜力,例如灾难检查、空间探索和国内援助。对 IRA 关节进行基于模型的优化,以进一步权衡其运动范围、有效载荷能力和重量。对优化原型进行实验以表征其弯曲模态和力输出,显示了我们的方法在某些特定应用中的巨大潜力,例如灾难检查、空间探索和国内援助。








































 京公网安备 11010802027423号
京公网安备 11010802027423号