Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Sensing with tools extends somatosensory processing beyond the body
Nature ( IF 50.5 ) Pub Date : 2018-09-01 , DOI: 10.1038/s41586-018-0460-0 Luke E Miller 1, 2, 3 , Luca Montroni 1, 2 , Eric Koun 1, 2 , Romeo Salemme 1, 2, 3 , Vincent Hayward 4, 5 , Alessandro Farnè 1, 2, 3, 6
Nature ( IF 50.5 ) Pub Date : 2018-09-01 , DOI: 10.1038/s41586-018-0460-0 Luke E Miller 1, 2, 3 , Luca Montroni 1, 2 , Eric Koun 1, 2 , Romeo Salemme 1, 2, 3 , Vincent Hayward 4, 5 , Alessandro Farnè 1, 2, 3, 6
Affiliation
|
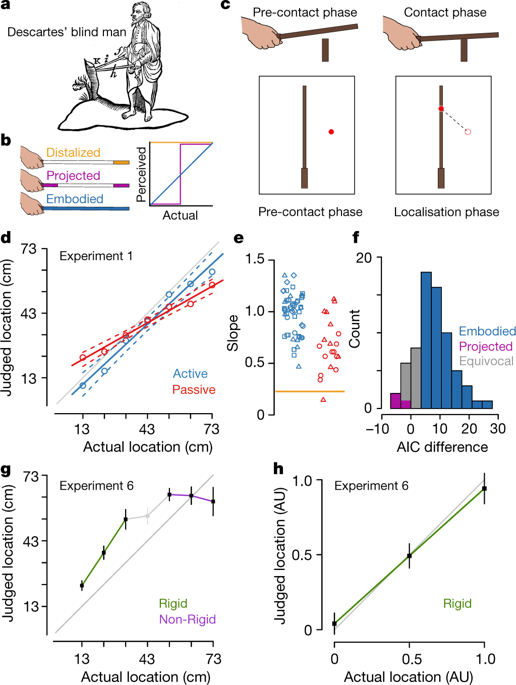
The ability to extend sensory information processing beyond the nervous system1 has been observed throughout the animal kingdom; for example, when rodents palpate objects using whiskers2 and spiders localize prey using webs3. We investigated whether the ability to sense objects with tools4–9 represents an analogous information processing scheme in humans. Here we provide evidence from behavioural psychophysics, structural mechanics and neuronal modelling, which shows that tools are treated by the nervous system as sensory extensions of the body rather than as simple distal links between the hand and the environment10,11. We first demonstrate that tool users can accurately sense where an object contacts a wooden rod, just as is possible on the skin. We next demonstrate that the impact location is encoded by the modal response of the tool upon impact, reflecting a pre-neuronal stage of mechanical information processing akin to sensing with whiskers2 and webs3. Lastly, we use a computational model of tactile afferents12 to demonstrate that impact location can be rapidly re-encoded into a temporally precise spiking code. This code predicts the behaviour of human participants, providing evidence that the information encoded in motifs shapes localization. Thus, we show that this sensory capability emerges from the functional coupling between the material, biomechanical and neural levels of information processing13,14.Tools are embodied by the human somatosensory system, serving as sensory extensions of the human body.
中文翻译:

使用工具进行感知将体感处理扩展到身体之外
在整个动物界都观察到了将感觉信息处理扩展到神经系统之外的能力。例如,当啮齿动物使用胡须触诊物体时,蜘蛛使用网状物定位猎物3。我们调查了使用工具 4-9 感知物体的能力是否代表了人类的类似信息处理方案。在这里,我们提供了来自行为心理物理学、结构力学和神经元建模的证据,这些证据表明,工具被神经系统视为身体的感官延伸,而不是手和环境之间的简单远端联系 10,11。我们首先证明工具用户可以准确地感知物体接触木棒的位置,就像在皮肤上一样。我们接下来证明撞击位置由工具在撞击时的模态响应编码,反映了机械信息处理的前神经元阶段,类似于用胡须 2 和网 3 进行感知。最后,我们使用触觉传入的计算模型来证明撞击位置可以快速重新编码为时间精确的尖峰代码。该代码预测人类参与者的行为,提供证据表明在图案中编码的信息塑造了定位。因此,我们表明这种感觉能力来自信息处理的材料、生物力学和神经水平之间的功能耦合13,14。工具由人体体感系统体现,作为人体的感官延伸。反映了机械信息处理的前神经元阶段,类似于用胡须 2 和网 3 进行感知。最后,我们使用触觉传入的计算模型来证明撞击位置可以快速重新编码为时间精确的尖峰代码。该代码预测人类参与者的行为,提供证据表明在图案中编码的信息塑造了定位。因此,我们表明这种感觉能力来自信息处理的材料、生物力学和神经水平之间的功能耦合13,14。工具由人体体感系统体现,作为人体的感官延伸。反映了机械信息处理的前神经元阶段,类似于用胡须2和网3进行感知。最后,我们使用触觉传入的计算模型来证明撞击位置可以快速重新编码为时间精确的尖峰代码。该代码预测人类参与者的行为,提供证据表明在图案中编码的信息塑造了定位。因此,我们表明这种感觉能力来自信息处理的材料、生物力学和神经水平之间的功能耦合13,14。工具由人体体感系统体现,作为人体的感官延伸。我们使用触觉传入的计算模型来证明撞击位置可以快速重新编码为时间精确的尖峰代码。该代码预测人类参与者的行为,提供证据表明在图案中编码的信息塑造了定位。因此,我们表明这种感觉能力来自信息处理的材料、生物力学和神经水平之间的功能耦合13,14。工具由人体体感系统体现,作为人体的感官延伸。我们使用触觉传入的计算模型来证明撞击位置可以快速重新编码为时间精确的尖峰代码。该代码预测人类参与者的行为,提供证据表明在图案中编码的信息塑造了定位。因此,我们表明这种感觉能力来自信息处理的材料、生物力学和神经水平之间的功能耦合13,14。工具由人体体感系统体现,作为人体的感官延伸。
更新日期:2018-09-01
中文翻译:
使用工具进行感知将体感处理扩展到身体之外
在整个动物界都观察到了将感觉信息处理扩展到神经系统之外的能力。例如,当啮齿动物使用胡须触诊物体时,蜘蛛使用网状物定位猎物3。我们调查了使用工具 4-9 感知物体的能力是否代表了人类的类似信息处理方案。在这里,我们提供了来自行为心理物理学、结构力学和神经元建模的证据,这些证据表明,工具被神经系统视为身体的感官延伸,而不是手和环境之间的简单远端联系 10,11。我们首先证明工具用户可以准确地感知物体接触木棒的位置,就像在皮肤上一样。我们接下来证明撞击位置由工具在撞击时的模态响应编码,反映了机械信息处理的前神经元阶段,类似于用胡须 2 和网 3 进行感知。最后,我们使用触觉传入的计算模型来证明撞击位置可以快速重新编码为时间精确的尖峰代码。该代码预测人类参与者的行为,提供证据表明在图案中编码的信息塑造了定位。因此,我们表明这种感觉能力来自信息处理的材料、生物力学和神经水平之间的功能耦合13,14。工具由人体体感系统体现,作为人体的感官延伸。反映了机械信息处理的前神经元阶段,类似于用胡须 2 和网 3 进行感知。最后,我们使用触觉传入的计算模型来证明撞击位置可以快速重新编码为时间精确的尖峰代码。该代码预测人类参与者的行为,提供证据表明在图案中编码的信息塑造了定位。因此,我们表明这种感觉能力来自信息处理的材料、生物力学和神经水平之间的功能耦合13,14。工具由人体体感系统体现,作为人体的感官延伸。反映了机械信息处理的前神经元阶段,类似于用胡须2和网3进行感知。最后,我们使用触觉传入的计算模型来证明撞击位置可以快速重新编码为时间精确的尖峰代码。该代码预测人类参与者的行为,提供证据表明在图案中编码的信息塑造了定位。因此,我们表明这种感觉能力来自信息处理的材料、生物力学和神经水平之间的功能耦合13,14。工具由人体体感系统体现,作为人体的感官延伸。我们使用触觉传入的计算模型来证明撞击位置可以快速重新编码为时间精确的尖峰代码。该代码预测人类参与者的行为,提供证据表明在图案中编码的信息塑造了定位。因此,我们表明这种感觉能力来自信息处理的材料、生物力学和神经水平之间的功能耦合13,14。工具由人体体感系统体现,作为人体的感官延伸。我们使用触觉传入的计算模型来证明撞击位置可以快速重新编码为时间精确的尖峰代码。该代码预测人类参与者的行为,提供证据表明在图案中编码的信息塑造了定位。因此,我们表明这种感觉能力来自信息处理的材料、生物力学和神经水平之间的功能耦合13,14。工具由人体体感系统体现,作为人体的感官延伸。










































 京公网安备 11010802027423号
京公网安备 11010802027423号