Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Printing ferromagnetic domains for untethered fast-transforming soft materials
Nature ( IF 50.5 ) Pub Date : 2018-06-01 , DOI: 10.1038/s41586-018-0185-0 Yoonho Kim , Hyunwoo Yuk , Ruike Zhao , Shawn A. Chester , Xuanhe Zhao
Nature ( IF 50.5 ) Pub Date : 2018-06-01 , DOI: 10.1038/s41586-018-0185-0 Yoonho Kim , Hyunwoo Yuk , Ruike Zhao , Shawn A. Chester , Xuanhe Zhao
|
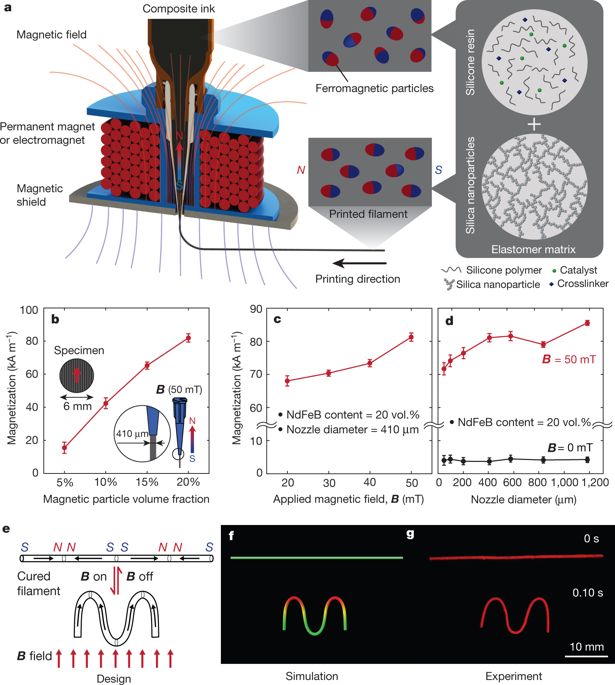
Soft materials capable of transforming between three-dimensional (3D) shapes in response to stimuli such as light, heat, solvent, electric and magnetic fields have applications in diverse areas such as flexible electronics1,2, soft robotics3,4 and biomedicine5–7. In particular, magnetic fields offer a safe and effective manipulation method for biomedical applications, which typically require remote actuation in enclosed and confined spaces8–10. With advances in magnetic field control11, magnetically responsive soft materials have also evolved from embedding discrete magnets12 or incorporating magnetic particles13 into soft compounds to generating nonuniform magnetization profiles in polymeric sheets14,15. Here we report 3D printing of programmed ferromagnetic domains in soft materials that enable fast transformations between complex 3D shapes via magnetic actuation. Our approach is based on direct ink writing16 of an elastomer composite containing ferromagnetic microparticles. By applying a magnetic field to the dispensing nozzle while printing17, we reorient particles along the applied field to impart patterned magnetic polarity to printed filaments. This method allows us to program ferromagnetic domains in complex 3D-printed soft materials, enabling a set of previously inaccessible modes of transformation, such as remotely controlled auxetic behaviours of mechanical metamaterials with negative Poisson’s ratios. The actuation speed and power density of our printed soft materials with programmed ferromagnetic domains are orders of magnitude greater than existing 3D-printed active materials. We further demonstrate diverse functions derived from complex shape changes, including reconfigurable soft electronics, a mechanical metamaterial that can jump and a soft robot that crawls, rolls, catches fast-moving objects and transports a pharmaceutical dose.Programmed ferromagnetic domains are 3D-printed into soft materials capable of fast transformations between complex three-dimensional shapes via magnetic actuation.
中文翻译:

为不受约束的快速转变软材料打印铁磁畴
能够响应光、热、溶剂、电场和磁场等刺激而在三维 (3D) 形状之间转换的软材料在不同领域有应用,例如柔性电子 1,2、软机器人 3,4 和生物医学 5-7。特别是,磁场为生物医学应用提供了一种安全有效的操作方法,这些应用通常需要在封闭和密闭空间中进行远程驱动8-10。随着磁场控制 11 的进步,磁响应软材料也已从嵌入离散磁体 12 或将磁性粒子 13 加入软化合物中发展为在聚合物片中产生不均匀的磁化曲线 14、15。在这里,我们报告了软材料中程序化铁磁畴的 3D 打印,通过磁驱动实现复杂 3D 形状之间的快速转换。我们的方法是基于含有铁磁微粒的弹性体复合材料的直接墨水书写。通过在打印时向分配喷嘴施加磁场,我们沿施加的场重新定向粒子,以将图案化的磁极性赋予打印的细丝。这种方法使我们能够在复杂的 3D 打印软材料中对铁磁畴进行编程,从而实现一组以前无法实现的转换模式,例如具有负泊松比的机械超材料的远程控制拉胀行为。我们具有编程铁磁畴的打印软材料的驱动速度和功率密度比现有的 3D 打印活性材料大几个数量级。我们进一步展示了源自复杂形状变化的多种功能,包括可重新配置的软电子、可以跳跃的机械超材料以及爬行、滚动、捕捉快速移动的物体和输送药物剂量的软机器人。 编程的铁磁域被 3D 打印到能够通过磁驱动在复杂的三维形状之间快速转换的软材料。
更新日期:2018-06-01
中文翻译:
为不受约束的快速转变软材料打印铁磁畴
能够响应光、热、溶剂、电场和磁场等刺激而在三维 (3D) 形状之间转换的软材料在不同领域有应用,例如柔性电子 1,2、软机器人 3,4 和生物医学 5-7。特别是,磁场为生物医学应用提供了一种安全有效的操作方法,这些应用通常需要在封闭和密闭空间中进行远程驱动8-10。随着磁场控制 11 的进步,磁响应软材料也已从嵌入离散磁体 12 或将磁性粒子 13 加入软化合物中发展为在聚合物片中产生不均匀的磁化曲线 14、15。在这里,我们报告了软材料中程序化铁磁畴的 3D 打印,通过磁驱动实现复杂 3D 形状之间的快速转换。我们的方法是基于含有铁磁微粒的弹性体复合材料的直接墨水书写。通过在打印时向分配喷嘴施加磁场,我们沿施加的场重新定向粒子,以将图案化的磁极性赋予打印的细丝。这种方法使我们能够在复杂的 3D 打印软材料中对铁磁畴进行编程,从而实现一组以前无法实现的转换模式,例如具有负泊松比的机械超材料的远程控制拉胀行为。我们具有编程铁磁畴的打印软材料的驱动速度和功率密度比现有的 3D 打印活性材料大几个数量级。我们进一步展示了源自复杂形状变化的多种功能,包括可重新配置的软电子、可以跳跃的机械超材料以及爬行、滚动、捕捉快速移动的物体和输送药物剂量的软机器人。 编程的铁磁域被 3D 打印到能够通过磁驱动在复杂的三维形状之间快速转换的软材料。










































 京公网安备 11010802027423号
京公网安备 11010802027423号