PLOS ONE ( IF 2.9 ) Pub Date : 2018-03-16 , DOI: 10.1371/journal.pone.0194427 Sangrok Jin , Jeongae Bak , Jongwon Kim , TaeWon Seo , Hwa Soo Kim
|
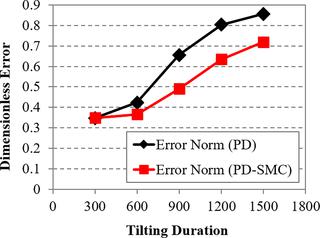
This paper presents a switching PD-based sliding mode control (PD-SMC) method for the 6-degree-of-freedom (DOF) hovering motion of the underwater robot with tilting thrusters. Four thrusters of robot can be tilted simultaneously in the horizontal and vertical directions, and the 6-DOF motion is achieved by switching between two thruster configurations. Therefore, the tilting speed of thruster becomes the most essential parameter to determine the stability of hovering motion. Even though the previous PD control ensures stable hovering motion within a certain ranges of tilting speed, a PD-SMC is suggested in this paper by combining PD control with sliding mode control in order to achieve acceptable hovering performance even at the much lower tilting speeds. Also, the sign function in the sliding mode control is replaced by a sigmoid function to reduce undesired chattering. Simulations show that while PD control is effective only for tilting duration of 600 ms, the PD-based sliding mode control can guarantee the stable hovering motion of underwater robot even for the tilting duration of up to 1500 ms. Extensive experimental results confirm the hovering performance of the proposed PD-SMC method is much superior to that of PD method for much larger tilting durations.
中文翻译:
基于开关PD的滑模控制,用于悬臂推进器水下机器人的悬停
本文提出了一种基于PD的切换滑模控制(PD-SMC)方法,用于带有倾斜推进器的水下机器人的6自由度(DOF)悬停运动。机器人的四个推进器可以同时在水平和垂直方向上倾斜,并且通过在两个推进器配置之间进行切换可以实现6自由度运动。因此,推进器的倾斜速度成为确定悬停运动的稳定性的最重要参数。即使先前的PD控制可以在一定的倾斜速度范围内确保稳定的悬停运动,但在本文中仍建议通过将PD控制与滑模控制相结合来实现PD-SMC,从而即使在低得多的倾斜速度下也可以实现可接受的悬停性能。还,滑模控制中的正负号函数被S型函数代替,以减少不希望的颤动。仿真表明,虽然PD控制仅对600 ms的倾斜持续时间有效,但基于PD的滑模控制即使在长达1500 ms的倾斜持续时间内也可以确保水下机器人的稳定悬停运动。大量的实验结果证明,在更长的倾斜时间内,所提出的PD-SMC方法的悬停性能远远优于PD方法。










































 京公网安备 11010802027423号
京公网安备 11010802027423号