当前位置:
X-MOL 学术
›
Mater. Today
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Controllable and reversible tuning of material rigidity for robot applications
Materials Today ( IF 21.1 ) Pub Date : 2018-06-01 , DOI: 10.1016/j.mattod.2017.10.010 Liyu Wang , Yang Yang , Yonghua Chen , Carmel Majidi , Fumiya Iida , Erin Askounis , Qibing Pei
Materials Today ( IF 21.1 ) Pub Date : 2018-06-01 , DOI: 10.1016/j.mattod.2017.10.010 Liyu Wang , Yang Yang , Yonghua Chen , Carmel Majidi , Fumiya Iida , Erin Askounis , Qibing Pei
|
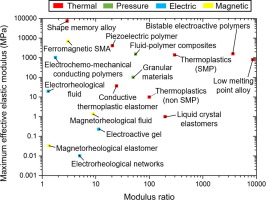
Abstract Tunable rigidity materials have potentially widespread implications in robotic technologies. They enable morphological shape change while maintaining structural strength, and can reversibly alternate between rigid, load bearing and compliant, flexible states capable of deformation within unstructured environments. In this review, we cover a range of materials with mechanical rigidity that can be reversibly tuned using one of several stimuli (e.g. heat, electrical current, electric field, magnetism, etc.). We explain the mechanisms by which these materials change rigidity and how they have been used for robot tasks. We quantitatively assess the performance in terms of the magnitude of rigidity, variation ratio, response time, and energy consumption, and explore the correlations between these desired characteristics as principles for material design and usage.
中文翻译:

用于机器人应用的材料刚度的可控和可逆调整
摘要 可调刚性材料在机器人技术中具有潜在的广泛影响。它们能够在保持结构强度的同时实现形态学形状变化,并且可以在刚性、承重和能够在非结构化环境中变形的柔顺、柔性状态之间可逆地交替。在这篇评论中,我们涵盖了一系列具有机械刚性的材料,这些材料可以使用几种刺激之一(例如热、电流、电场、磁力等)进行可逆调整。我们解释了这些材料改变刚度的机制以及它们如何用于机器人任务。我们从刚性大小、变化率、响应时间和能耗等方面对性能进行定量评估,
更新日期:2018-06-01
中文翻译:
用于机器人应用的材料刚度的可控和可逆调整
摘要 可调刚性材料在机器人技术中具有潜在的广泛影响。它们能够在保持结构强度的同时实现形态学形状变化,并且可以在刚性、承重和能够在非结构化环境中变形的柔顺、柔性状态之间可逆地交替。在这篇评论中,我们涵盖了一系列具有机械刚性的材料,这些材料可以使用几种刺激之一(例如热、电流、电场、磁力等)进行可逆调整。我们解释了这些材料改变刚度的机制以及它们如何用于机器人任务。我们从刚性大小、变化率、响应时间和能耗等方面对性能进行定量评估,










































 京公网安备 11010802027423号
京公网安备 11010802027423号