当前位置:
X-MOL 学术
›
Adv. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Soft Ultrathin Electronics Innervated Adaptive Fully Soft Robots
Advanced Materials ( IF 27.4 ) Pub Date : 2018-02-05 , DOI: 10.1002/adma.201706695 Chengjun Wang 1, 2 , Kyoseung Sim 3 , Jin Chen 4 , Hojin Kim 5 , Zhoulyu Rao 3 , Yuhang Li 4, 6 , Weiqiu Chen 2 , Jizhou Song 2, 6 , Rafael Verduzco 5, 7 , Cunjiang Yu 1, 3, 8
Advanced Materials ( IF 27.4 ) Pub Date : 2018-02-05 , DOI: 10.1002/adma.201706695 Chengjun Wang 1, 2 , Kyoseung Sim 3 , Jin Chen 4 , Hojin Kim 5 , Zhoulyu Rao 3 , Yuhang Li 4, 6 , Weiqiu Chen 2 , Jizhou Song 2, 6 , Rafael Verduzco 5, 7 , Cunjiang Yu 1, 3, 8
Affiliation
|
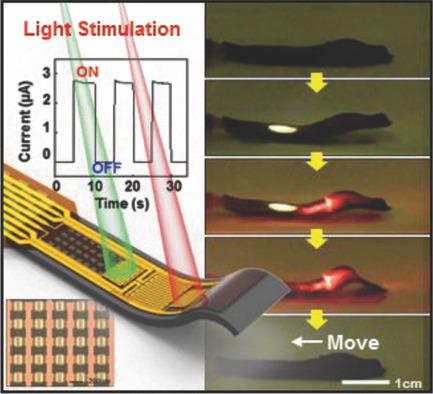
Soft robots outperform the conventional hard robots on significantly enhanced safety, adaptability, and complex motions. The development of fully soft robots, especially fully from smart soft materials to mimic soft animals, is still nascent. In addition, to date, existing soft robots cannot adapt themselves to the surrounding environment, i.e., sensing and adaptive motion or response, like animals. Here, compliant ultrathin sensing and actuating electronics innervated fully soft robots that can sense the environment and perform soft bodied crawling adaptively, mimicking an inchworm, are reported. The soft robots are constructed with actuators of open‐mesh shaped ultrathin deformable heaters, sensors of single‐crystal Si optoelectronic photodetectors, and thermally responsive artificial muscle of carbon‐black‐doped liquid‐crystal elastomer (LCE‐CB) nanocomposite. The results demonstrate that adaptive crawling locomotion can be realized through the conjugation of sensing and actuation, where the sensors sense the environment and actuators respond correspondingly to control the locomotion autonomously through regulating the deformation of LCE‐CB bimorphs and the locomotion of the robots. The strategy of innervating soft sensing and actuating electronics with artificial muscles paves the way for the development of smart autonomous soft robots.
中文翻译:

软超薄电子神经自适应全软机器人
软机器人在安全性,适应性和复杂运动方面均明显优于传统的硬机器人。完全软机器人的发展,特别是从智能软材料到模仿软动物的完全发展,仍处于起步阶段。另外,迄今为止,现有的软机器人不能像动物一样适应周围的环境,即感应和适应性运动或响应。在此,已报道了符合标准的超薄传感和致动电子设备,它们支配了完全软的机器人,该机器人可以感知环境并模仿an虫而自适应地执行软体爬行。这些软机器人由开孔形超薄可变形加热器的执行器,单晶硅光电光电探测器的传感器,碳黑掺杂液晶弹性体(LCE-CB)纳米复合材料的热响应人造肌肉。结果表明,通过感测和驱动的结合可以实现自适应爬行运动,其中传感器感测环境,执行器相应地做出响应,通过调节LCE-CB双压电晶片的变形和机器人的运动来自主控制运动。用人造肌肉神经软感应和驱动电子设备的策略为智能自主软机器人的发展铺平了道路。传感器感应到环境,执行器相应地做出反应,通过调节LCE-CB双压电晶片的变形和机器人的运动来自主控制运动。用人造肌肉神经软感应和驱动电子设备的策略为智能自主软机器人的发展铺平了道路。传感器感应到环境,执行器相应地做出反应,通过调节LCE-CB双压电晶片的变形和机器人的运动来自主控制运动。用人造肌肉神经软感应和驱动电子设备的策略为智能自主软机器人的发展铺平了道路。
更新日期:2018-02-05
中文翻译:
软超薄电子神经自适应全软机器人
软机器人在安全性,适应性和复杂运动方面均明显优于传统的硬机器人。完全软机器人的发展,特别是从智能软材料到模仿软动物的完全发展,仍处于起步阶段。另外,迄今为止,现有的软机器人不能像动物一样适应周围的环境,即感应和适应性运动或响应。在此,已报道了符合标准的超薄传感和致动电子设备,它们支配了完全软的机器人,该机器人可以感知环境并模仿an虫而自适应地执行软体爬行。这些软机器人由开孔形超薄可变形加热器的执行器,单晶硅光电光电探测器的传感器,碳黑掺杂液晶弹性体(LCE-CB)纳米复合材料的热响应人造肌肉。结果表明,通过感测和驱动的结合可以实现自适应爬行运动,其中传感器感测环境,执行器相应地做出响应,通过调节LCE-CB双压电晶片的变形和机器人的运动来自主控制运动。用人造肌肉神经软感应和驱动电子设备的策略为智能自主软机器人的发展铺平了道路。传感器感应到环境,执行器相应地做出反应,通过调节LCE-CB双压电晶片的变形和机器人的运动来自主控制运动。用人造肌肉神经软感应和驱动电子设备的策略为智能自主软机器人的发展铺平了道路。传感器感应到环境,执行器相应地做出反应,通过调节LCE-CB双压电晶片的变形和机器人的运动来自主控制运动。用人造肌肉神经软感应和驱动电子设备的策略为智能自主软机器人的发展铺平了道路。










































 京公网安备 11010802027423号
京公网安备 11010802027423号