当前位置:
X-MOL 学术
›
Adv. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Electrically Driven Microengineered Bioinspired Soft Robots
Advanced Materials ( IF 29.4 ) Pub Date : 2018-01-11 , DOI: 10.1002/adma.201704189 Su Ryon Shin 1, 2 , Bianca Migliori 1, 2, 3 , Beatrice Miccoli 1, 2 , Yi‐Chen Li 1, 2 , Pooria Mostafalu 1, 2 , Jungmok Seo 1, 2, 4 , Serena Mandla 1, 2 , Alessandro Enrico 1, 2, 5 , Silvia Antona 1, 2 , Ram Sabarish 1, 2 , Ting Zheng 1, 2 , Lorenzo Pirrami 6, 7 , Kaizhen Zhang 8 , Yu Shrike Zhang 1, 2 , Kai‐tak Wan 8 , Danilo Demarchi 6 , Mehmet R. Dokmeci 1, 2 , Ali Khademhosseini 1, 2, 9, 10, 11
Advanced Materials ( IF 29.4 ) Pub Date : 2018-01-11 , DOI: 10.1002/adma.201704189 Su Ryon Shin 1, 2 , Bianca Migliori 1, 2, 3 , Beatrice Miccoli 1, 2 , Yi‐Chen Li 1, 2 , Pooria Mostafalu 1, 2 , Jungmok Seo 1, 2, 4 , Serena Mandla 1, 2 , Alessandro Enrico 1, 2, 5 , Silvia Antona 1, 2 , Ram Sabarish 1, 2 , Ting Zheng 1, 2 , Lorenzo Pirrami 6, 7 , Kaizhen Zhang 8 , Yu Shrike Zhang 1, 2 , Kai‐tak Wan 8 , Danilo Demarchi 6 , Mehmet R. Dokmeci 1, 2 , Ali Khademhosseini 1, 2, 9, 10, 11
Affiliation
|
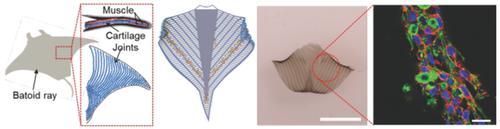
To create life‐like movements, living muscle actuator technologies have borrowed inspiration from biomimetic concepts in developing bioinspired robots. Here, the development of a bioinspired soft robotics system, with integrated self‐actuating cardiac muscles on a hierarchically structured scaffold with flexible gold microelectrodes is reported. Inspired by the movement of living organisms, a batoid‐fish‐shaped substrate is designed and reported, which is composed of two micropatterned hydrogel layers. The first layer is a poly(ethylene glycol) hydrogel substrate, which provides a mechanically stable structure for the robot, followed by a layer of gelatin methacryloyl embedded with carbon nanotubes, which serves as a cell culture substrate, to create the actuation component for the soft body robot. In addition, flexible Au microelectrodes are embedded into the biomimetic scaffold, which not only enhance the mechanical integrity of the device, but also increase its electrical conductivity. After culturing and maturation of cardiomyocytes on the biomimetic scaffold, they show excellent myofiber organization and provide self‐actuating motions aligned with the direction of the contractile force of the cells. The Au microelectrodes placed below the cell layer further provide localized electrical stimulation and control of the beating behavior of the bioinspired soft robot.
中文翻译:

电动微工程生物启发式软机器人
为了创造栩栩如生的动作,活体肌肉执行器技术在仿生机器人的开发中借鉴了仿生概念的灵感。在此,据报道开发了具有生物启发性的软机器人系统,该系统在具有柔性金微电极的分层结构支架上集成了自驱动的心肌。受活生物体运动的启发,设计并报道了一种蝙蝠鱼状的基质,该基质由两个微图案的水凝胶层组成。第一层是聚乙二醇水凝胶基质,它为机器人提供了机械稳定的结构,其后是一层嵌入有碳纳米管的明胶甲基丙烯酰基,它充当细胞培养基质,从而为机器人创造了驱动组件。软体机器人。此外,柔性Au微电极嵌入仿生支架中,不仅增强了设备的机械完整性,而且还提高了其电导率。在仿生支架上培养和成熟心肌细胞后,它们表现出出色的肌纤维组织,并提供与细胞收缩力方向一致的自驱动运动。置于细胞层下方的Au微电极进一步提供了局部电刺激,并控制了生物启发式软机器人的跳动行为。它们显示出出色的肌纤维组织,并提供与细胞收缩力方向一致的自驱动运动。置于细胞层下方的Au微电极进一步提供了局部电刺激,并控制了生物启发式软机器人的跳动行为。它们显示出出色的肌纤维组织,并提供与细胞收缩力方向一致的自驱动运动。置于细胞层下方的Au微电极进一步提供了局部电刺激,并控制了生物启发式软机器人的跳动行为。
更新日期:2018-01-11
中文翻译:
电动微工程生物启发式软机器人
为了创造栩栩如生的动作,活体肌肉执行器技术在仿生机器人的开发中借鉴了仿生概念的灵感。在此,据报道开发了具有生物启发性的软机器人系统,该系统在具有柔性金微电极的分层结构支架上集成了自驱动的心肌。受活生物体运动的启发,设计并报道了一种蝙蝠鱼状的基质,该基质由两个微图案的水凝胶层组成。第一层是聚乙二醇水凝胶基质,它为机器人提供了机械稳定的结构,其后是一层嵌入有碳纳米管的明胶甲基丙烯酰基,它充当细胞培养基质,从而为机器人创造了驱动组件。软体机器人。此外,柔性Au微电极嵌入仿生支架中,不仅增强了设备的机械完整性,而且还提高了其电导率。在仿生支架上培养和成熟心肌细胞后,它们表现出出色的肌纤维组织,并提供与细胞收缩力方向一致的自驱动运动。置于细胞层下方的Au微电极进一步提供了局部电刺激,并控制了生物启发式软机器人的跳动行为。它们显示出出色的肌纤维组织,并提供与细胞收缩力方向一致的自驱动运动。置于细胞层下方的Au微电极进一步提供了局部电刺激,并控制了生物启发式软机器人的跳动行为。它们显示出出色的肌纤维组织,并提供与细胞收缩力方向一致的自驱动运动。置于细胞层下方的Au微电极进一步提供了局部电刺激,并控制了生物启发式软机器人的跳动行为。


























 京公网安备 11010802027423号
京公网安备 11010802027423号