当前位置:
X-MOL 学术
›
Adv. Electron. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Flexible, Transparent, Sensitive, and Crosstalk‐Free Capacitive Tactile Sensor Array Based on Graphene Electrodes and Air Dielectric
Advanced Electronic Materials ( IF 5.3 ) Pub Date : 2017-11-02 , DOI: 10.1002/aelm.201700427 Soonjae Pyo 1 , Jungwook Choi 2 , Jongbaeg Kim 1
Advanced Electronic Materials ( IF 5.3 ) Pub Date : 2017-11-02 , DOI: 10.1002/aelm.201700427 Soonjae Pyo 1 , Jungwook Choi 2 , Jongbaeg Kim 1
Affiliation
|
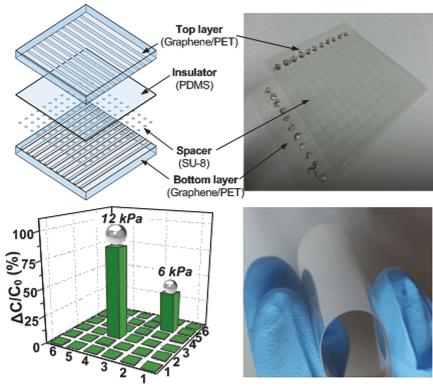
The development of sensitive, flexible, and transparent tactile sensors is of great interest for next‐generation flexible displays and human–machine interfaces. Although a few materials and structural designs have been previously developed for high‐performance tactile sensors, achieving flexibility, full transparency, and highly sensitive multipoint recognition without crosstalk remains a significant challenge for such systems. This work demonstrates a capacitive tactile sensor composed of two sets of facing graphene electrodes separated by spacers, which forms an air dielectric between them. The air gap facilitates more effective deformation of the top graphene electrode under pressure compared to typical elastomer dielectrics, resulting in a high sensitivity of 6.55% kPa−1 and a fast response time of ≈70 ms. Taking advantage of the remarkable properties of graphene for electrode usage, the tactile sensor presents sufficient transparency (over 70% at 550 nm) as well as excellent electrical and mechanical flexibility for 500 cycles at a bending radius of 8 mm. Simulated and experimental results validate that the isolation of each tactile cell by the spacers allows the pixelated sensor array to recognize the spatial distribution of applied pressure without crosstalk. The proposed sensor would be a promising candidate for tactile sensing components that require both flexibility and transparency.
中文翻译:

基于石墨烯电极和空气电介质的灵活,透明,灵敏和无串扰的电容式触觉传感器阵列
灵敏,灵活和透明的触觉传感器的开发对下一代柔性显示器和人机界面非常感兴趣。尽管以前已经为高性能的触觉传感器开发了一些材料和结构设计,但是对于此类系统而言,实现灵活性,完全透明性和高度灵敏的多点识别而又不会产生串扰仍然是一个重大挑战。这项工作演示了一种电容式触觉传感器,该传感器由两组用垫片隔开的对置石墨烯电极构成,在它们之间形成了空气绝缘层。与典型的弹性体电介质相比,气隙有助于顶部石墨烯电极在压力下更有效地变形,从而导致6.55%kPa -1的高灵敏度快速响应时间约为70毫秒。利用石墨烯用于电极的卓越性能,该触觉传感器具有足够的透明度(在550 nm处超过70%),并且在8 mm的弯曲半径下可进行500次循环,具有出色的电气和机械柔韧性。仿真和实验结果证明,通过隔离物隔离每个触觉单元,可以使像素化传感器阵列识别施加压力的空间分布而不会产生串扰。所提出的传感器将是需要柔性和透明性的触觉传感组件的有前途的候选者。
更新日期:2017-11-02
中文翻译:
基于石墨烯电极和空气电介质的灵活,透明,灵敏和无串扰的电容式触觉传感器阵列
灵敏,灵活和透明的触觉传感器的开发对下一代柔性显示器和人机界面非常感兴趣。尽管以前已经为高性能的触觉传感器开发了一些材料和结构设计,但是对于此类系统而言,实现灵活性,完全透明性和高度灵敏的多点识别而又不会产生串扰仍然是一个重大挑战。这项工作演示了一种电容式触觉传感器,该传感器由两组用垫片隔开的对置石墨烯电极构成,在它们之间形成了空气绝缘层。与典型的弹性体电介质相比,气隙有助于顶部石墨烯电极在压力下更有效地变形,从而导致6.55%kPa -1的高灵敏度快速响应时间约为70毫秒。利用石墨烯用于电极的卓越性能,该触觉传感器具有足够的透明度(在550 nm处超过70%),并且在8 mm的弯曲半径下可进行500次循环,具有出色的电气和机械柔韧性。仿真和实验结果证明,通过隔离物隔离每个触觉单元,可以使像素化传感器阵列识别施加压力的空间分布而不会产生串扰。所提出的传感器将是需要柔性和透明性的触觉传感组件的有前途的候选者。










































 京公网安备 11010802027423号
京公网安备 11010802027423号