当前位置:
X-MOL 学术
›
Adv. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
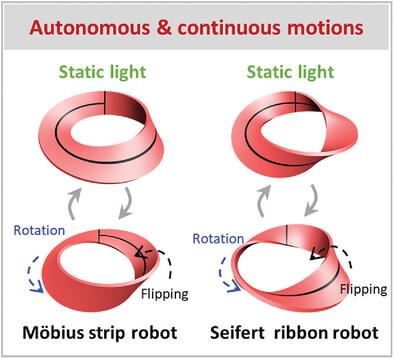
Closed Twisted Hydrogel Ribbons with Self-Sustained Motions under Static Light Irradiation
Advanced Materials ( IF 29.4 ) Pub Date : 2024-04-23 , DOI: 10.1002/adma.202314152 Qing Li Zhu 1 , Weixuan Liu 2 , Olena Khoruzhenko 3 , Josef Breu 3 , Huiying Bai 1 , Wei Hong 2 , Qiang Zheng 1 , Zi Liang Wu 1
Advanced Materials ( IF 29.4 ) Pub Date : 2024-04-23 , DOI: 10.1002/adma.202314152 Qing Li Zhu 1 , Weixuan Liu 2 , Olena Khoruzhenko 3 , Josef Breu 3 , Huiying Bai 1 , Wei Hong 2 , Qiang Zheng 1 , Zi Liang Wu 1
Affiliation
|
Self-sustained motions are widespread in biological systems by harvesting energy from surrounding environments, which inspire scientists to develop autonomous soft robots. However, most-existing soft robots require dynamic heterogeneous stimuli or complex fabrication with different components. Recently, control of topological geometry has been promising to afford soft robots with physical intelligence and thus life-like motions. Reported here are a series of closed twisted ribbon robots, which exhibit self-sustained flipping and rotation under constant light irradiation. Both Möbius strip and Seifert ribbon robots are devised for the first time by using an identical hydrogel, which responds to light irradiation on either side. Experiment and simulation results indicate that the self-regulated motions of the hydrogel robots are related to fast and reversible response of muscle-like gel, self-shadowing effect, and topology-facilitated refresh of light-exposed regions. The motion speeds and directions of the hydrogel robots can be tuned over a wide range. These closed twisted ribbon hydrogels are further applied to execute specific tasks in aqueous environments, such as collecting plastic balls, climbing a vertical rod, and transporting objects. This work presents new design principle for autonomous hydrogel robots by benefiting from material response and topology geometry, which may be inspirative for the robotics community.
中文翻译:

静态光照射下具有自持运动的闭合扭曲水凝胶带
通过从周围环境中获取能量,自我维持运动在生物系统中广泛存在,这激发了科学家们开发自主软机器人。然而,大多数现有的软机器人需要动态异质刺激或具有不同组件的复杂制造。最近,拓扑几何控制有望提供具有物理智能和逼真运动的软机器人。这里报道的是一系列封闭的扭带机器人,它们在恒定的光照射下表现出自我维持的翻转和旋转。莫比乌斯带和塞弗特带机器人都是首次使用相同的水凝胶设计,该水凝胶对两侧的光照射都有反应。实验和仿真结果表明,水凝胶机器人的自我调节运动与类肌肉凝胶的快速可逆响应、自阴影效应和光暴露区域的拓扑促进刷新有关。水凝胶机器人的运动速度和方向可以在很大范围内调节。这些闭合扭带水凝胶进一步应用于在水环境中执行特定任务,例如收集塑料球、攀爬垂直杆和运输物体。这项工作通过材料响应和拓扑几何结构,提出了自主水凝胶机器人的新设计原理,这可能会对机器人社区产生启发。
更新日期:2024-04-23
中文翻译:
静态光照射下具有自持运动的闭合扭曲水凝胶带
通过从周围环境中获取能量,自我维持运动在生物系统中广泛存在,这激发了科学家们开发自主软机器人。然而,大多数现有的软机器人需要动态异质刺激或具有不同组件的复杂制造。最近,拓扑几何控制有望提供具有物理智能和逼真运动的软机器人。这里报道的是一系列封闭的扭带机器人,它们在恒定的光照射下表现出自我维持的翻转和旋转。莫比乌斯带和塞弗特带机器人都是首次使用相同的水凝胶设计,该水凝胶对两侧的光照射都有反应。实验和仿真结果表明,水凝胶机器人的自我调节运动与类肌肉凝胶的快速可逆响应、自阴影效应和光暴露区域的拓扑促进刷新有关。水凝胶机器人的运动速度和方向可以在很大范围内调节。这些闭合扭带水凝胶进一步应用于在水环境中执行特定任务,例如收集塑料球、攀爬垂直杆和运输物体。这项工作通过材料响应和拓扑几何结构,提出了自主水凝胶机器人的新设计原理,这可能会对机器人社区产生启发。


























 京公网安备 11010802027423号
京公网安备 11010802027423号