当前位置:
X-MOL 学术
›
Nano Lett.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
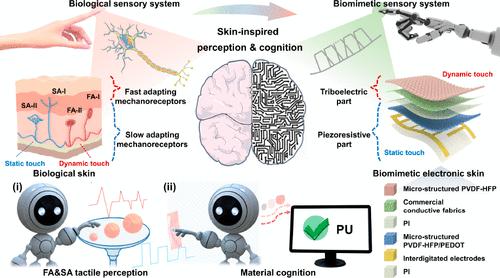
Biomimetic Electronic Skin for Robots Aiming at Superior Dynamic-Static Perception and Material Cognition Based on Triboelectric-Piezoresistive Effects
Nano Letters ( IF 10.8 ) Pub Date : 2024-03-25 , DOI: 10.1021/acs.nanolett.4c00623 Huiyun Zhang 1 , Hao Li 1, 2 , Yang Li 1, 2
Nano Letters ( IF 10.8 ) Pub Date : 2024-03-25 , DOI: 10.1021/acs.nanolett.4c00623 Huiyun Zhang 1 , Hao Li 1, 2 , Yang Li 1, 2
Affiliation
|
Empowering robots with tactile perception and even thinking as well as judgment capabilities similar to those of humans is an inevitable path for the development of future robots. Here, we propose a biomimetic electronic skin (BES) that truly serves and applies to robots to achieve superior dynamic-static perception and material cognition functionalities. First, the microstructured triboelectric and piezoresistive layers are fabricated by a facile template method followed by selected self-polymerization treatment, enabling BES with high sensitivity and a wide detection range. Further, through laminated-independent triboelectric and piezoresistive parts for perceiving dynamic and static pressures simultaneously, the BES is capable of supporting the robot hand to monitor the entire process during object grasping. Most importantly, by further combining a neural network model, an intelligent cognition system is constructed for real-time cognition of the object material species via one touch of the robot hand under arbitrary pressures, which goes beyond the human cognition ability.
中文翻译:

机器人仿生电子皮肤旨在基于摩擦电压阻效应实现卓越的动静态感知和材料认知
赋予机器人类似人类的触觉感知甚至思维判断能力,是未来机器人发展的必然路径。在这里,我们提出了一种真正服务并应用于机器人的仿生电子皮肤(BES),以实现卓越的动静态感知和材料认知功能。首先,通过简单的模板方法制造微结构摩擦电层和压阻层,然后进行选择性自聚合处理,使BES具有高灵敏度和宽检测范围。此外,通过同时感知动态和静态压力的层压独立摩擦电和压阻部件,BES能够支持机器人手监控物体抓取过程中的整个过程。最重要的是,通过进一步结合神经网络模型,构建了智能认知系统,在任意压力下,通过机械手的一触即刻对物体物质种类进行实时认知,这超出了人类的认知能力。
更新日期:2024-03-25
中文翻译:
机器人仿生电子皮肤旨在基于摩擦电压阻效应实现卓越的动静态感知和材料认知
赋予机器人类似人类的触觉感知甚至思维判断能力,是未来机器人发展的必然路径。在这里,我们提出了一种真正服务并应用于机器人的仿生电子皮肤(BES),以实现卓越的动静态感知和材料认知功能。首先,通过简单的模板方法制造微结构摩擦电层和压阻层,然后进行选择性自聚合处理,使BES具有高灵敏度和宽检测范围。此外,通过同时感知动态和静态压力的层压独立摩擦电和压阻部件,BES能够支持机器人手监控物体抓取过程中的整个过程。最重要的是,通过进一步结合神经网络模型,构建了智能认知系统,在任意压力下,通过机械手的一触即刻对物体物质种类进行实时认知,这超出了人类的认知能力。


























 京公网安备 11010802027423号
京公网安备 11010802027423号