npj Microgravity ( IF 4.4 ) Pub Date : 2024-01-11 , DOI: 10.1038/s41526-024-00350-2 Etienne Guillaud 1 , Vincent Leconte 1 , Emilie Doat 1 , Dominique Guehl 2 , Jean-René Cazalets 1
|
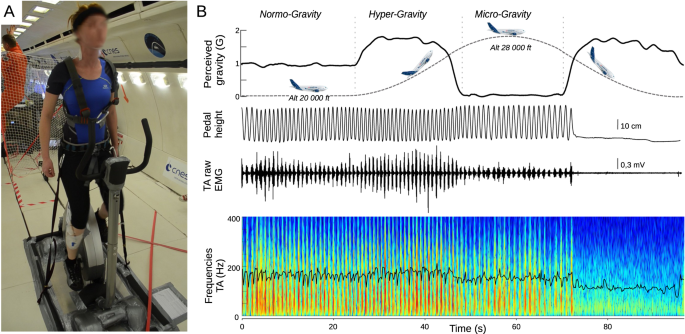
This study investigates the impact of gravity on lower limb muscle coordination during pedaling. It explores how pedaling behaviors, kinematics, and muscle activation patterns dynamically adapts to changes in gravity and resistance levels. The experiment was conducted in parabolic flights, simulating microgravity, hypergravity (1.8 g), and normogravity conditions. Participants pedaled on an ergometer with varying resistances. The goal was to identify potential changes in muscle synergies and activation strategies under different gravitational contexts. Results indicate that pedaling cadence adjusted naturally in response to both gravity and resistance changes. Cadence increased with higher gravity and decreased with higher resistance levels. Muscular activities were characterized by two synergies representing pull and push phases of pedaling. The timing of synergy activation was influenced by gravity, with a delay in activation observed in microgravity compared to other conditions. Despite these changes, the velocity profile of pedaling remained stable across gravity conditions. The findings strongly suggest that the CNS dynamically manages the shift in body weight by finely tuning muscular coordination, thereby ensuring the maintenance of a stable motor output. Furthermore, electromyography analysis suggest that neuromuscular discharge frequencies were not affected by gravity changes. This implies that the types of muscle fibers recruited during exercise in modified gravity are similar to those used in normogravity. This research has contributed to a better understanding of how the human locomotor system responds to varying gravitational conditions, shedding light on the potential mechanisms underlying astronauts’ gait changes upon returning from space missions.
中文翻译:
运动协同作用对重力约束的感觉运动适应
本研究探讨了踩踏过程中重力对下肢肌肉协调性的影响。它探讨了踩踏行为、运动学和肌肉激活模式如何动态适应重力和阻力水平的变化。该实验以抛物线飞行方式进行,模拟微重力、超重力(1.8 g)和常重力条件。参与者在不同阻力的测力计上踩踏板。目标是确定不同重力背景下肌肉协同作用和激活策略的潜在变化。结果表明,踩踏节奏会随着重力和阻力的变化而自然调整。踏频随着重力的增加而增加,随着阻力水平的增加而减少。肌肉活动的特点是两种协同作用,分别代表踩踏的拉动和推动阶段。协同激活的时间受到重力的影响,与其他条件相比,在微重力下观察到激活的延迟。尽管发生了这些变化,踩踏的速度曲线在重力条件下仍然保持稳定。研究结果强烈表明,中枢神经系统通过微调肌肉协调来动态管理体重的变化,从而确保维持稳定的运动输出。此外,肌电图分析表明神经肌肉放电频率不受重力变化的影响。这意味着在改变重力条件下运动时募集的肌纤维类型与常重力条件下使用的肌纤维类型相似。这项研究有助于更好地理解人类运动系统如何响应不同的重力条件,揭示宇航员从太空任务返回后步态变化的潜在机制。










































 京公网安备 11010802027423号
京公网安备 11010802027423号