Robotics and Computer-Integrated Manufacturing ( IF 9.1 ) Pub Date : 2023-05-20 , DOI: 10.1016/j.rcim.2023.102581 Lequn Chen , Guijun Bi , Xiling Yao , Chaolin Tan , Jinlong Su , Nicholas Poh Huat Ng , Youxiang Chew , Kui Liu , Seung Ki Moon
|
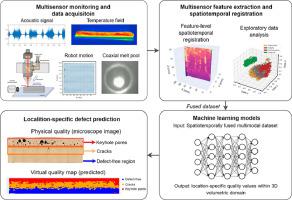
Early detection of defects, such as keyhole pores and cracks is crucial in laser-directed energy deposition (L-DED) additive manufacturing (AM) to prevent build failures. However, the complex melt pool behaviour cannot be adequately captured by conventional single-modal process monitoring approaches. This study introduces a multisensor fusion-based digital twin (MFDT) for localized quality prediction in the robotic L-DED process. The data used in multisensor fusion includes features extracted from a coaxial melt pool vision camera, a microphone, and an off-axis short wavelength infrared thermal camera. The key novelty of this work is a spatiotemporal data fusion method that synchronizes multisensor features with the real-time robot motion data to achieve localized quality prediction. Optical microscope (OM) images of the printed part are used to locate defect-free and defective regions (i.e., cracks and keyhole pores), which serve as ground truth labels for training supervised machine learning (ML) models for quality prediction. The trained ML model is then used to generate a virtual quality map that registers quality prediction outcomes within the 3D volume of the printed part, thus eliminating the need of physical inspections by destructive methods. Experiments show that the virtual quality map closely matches the actual quality observed by OM. Compared to traditional single-sensor-based quality prediction, the MFDT has achieved a significantly higher quality prediction accuracy (96%), a higher ROC-AUC score (99%), and a lower false alarm rate (4.4%). As a result, the MFDT is a more reliable method for defect prediction. The proposed MFDT also lays the groundwork for our future development of a self-adaptive hybrid processing strategy that combines machining with AM for defect removal and quality improvement.
中文翻译:
基于多传感器融合的数字双胞胎用于机器人激光定向能量沉积中的局部质量预测
在激光定向能量沉积 (L-DED) 增材制造 (AM) 中,早期检测锁孔和裂纹等缺陷对于防止构建失败至关重要。然而,复杂的熔池行为无法通过传统的单模式过程监控方法充分捕捉。本研究介绍了一种基于多传感器融合的数字双胞胎 (MFDT),用于机器人 L-DED 过程中的局部质量预测。多传感器融合中使用的数据包括从同轴熔池视觉相机、麦克风和离轴短波红外热像仪中提取的特征。这项工作的主要创新点是一种时空数据融合方法,该方法将多传感器特征与实时机器人运动数据同步,以实现局部质量预测。打印部件的光学显微镜 (OM) 图像用于定位无缺陷和缺陷区域(即裂纹和锁眼孔),这些区域用作训练监督机器学习 (ML) 模型进行质量预测的地面真实标签。然后使用经过训练的 ML 模型生成虚拟质量图,该图在打印部件的 3D 体积内记录质量预测结果,从而消除了通过破坏性方法进行物理检查的需要。实验表明,虚拟质量图与 OM 观察到的实际质量非常吻合。与传统的基于单传感器的质量预测相比,MFDT 取得了显着更高的质量预测精度(96%)、更高的 ROC-AUC 分数(99%)和更低的误报率(4.4%)。因此,MFDT 是一种更可靠的缺陷预测方法。










































 京公网安备 11010802027423号
京公网安备 11010802027423号