

13.2 kV Class 3-Phase Solid State Transformer System Based on EtherCAT Communication
Abstract
:1. Introduction
2. Structure of the Proposed 3-Phase Solid State Transformer
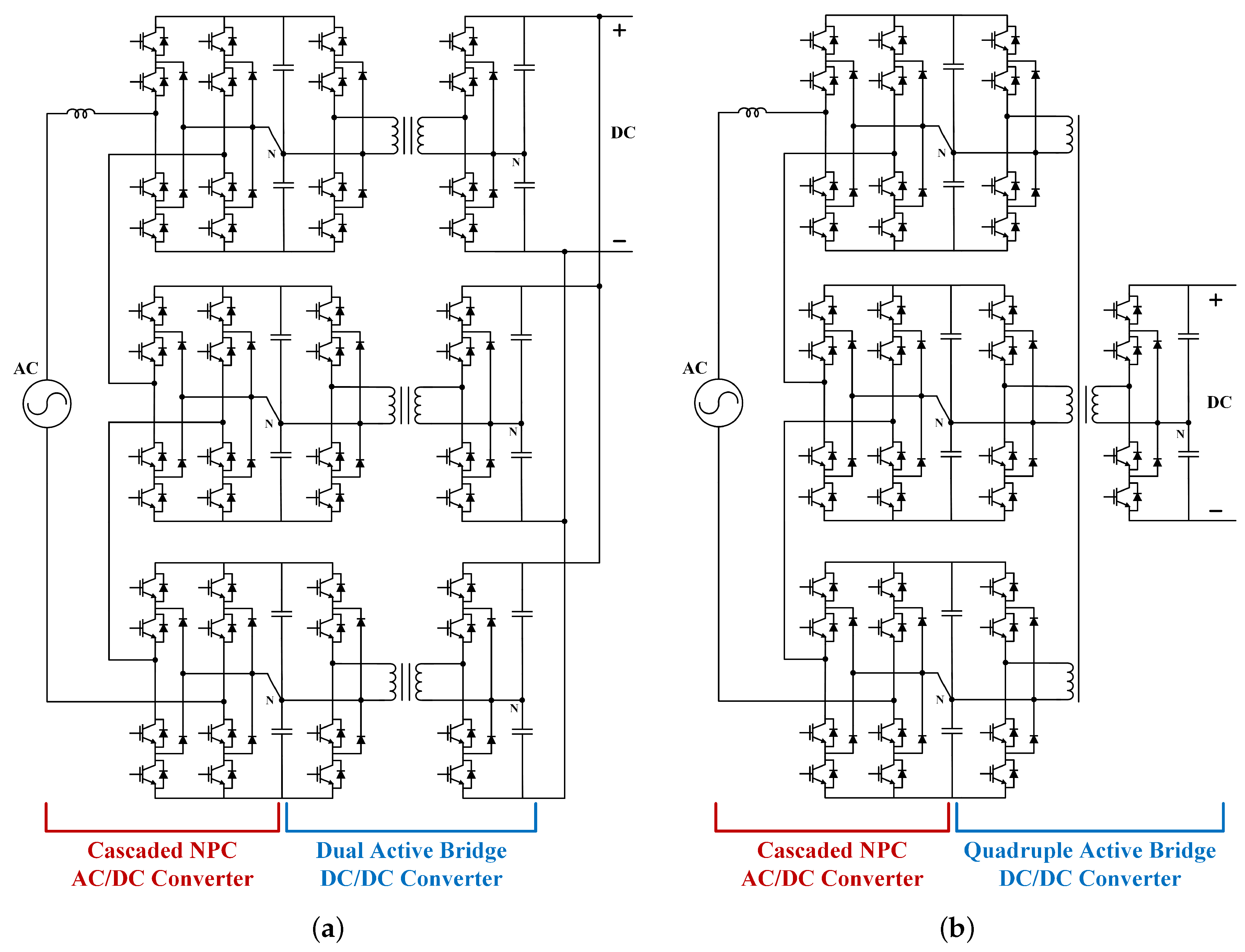
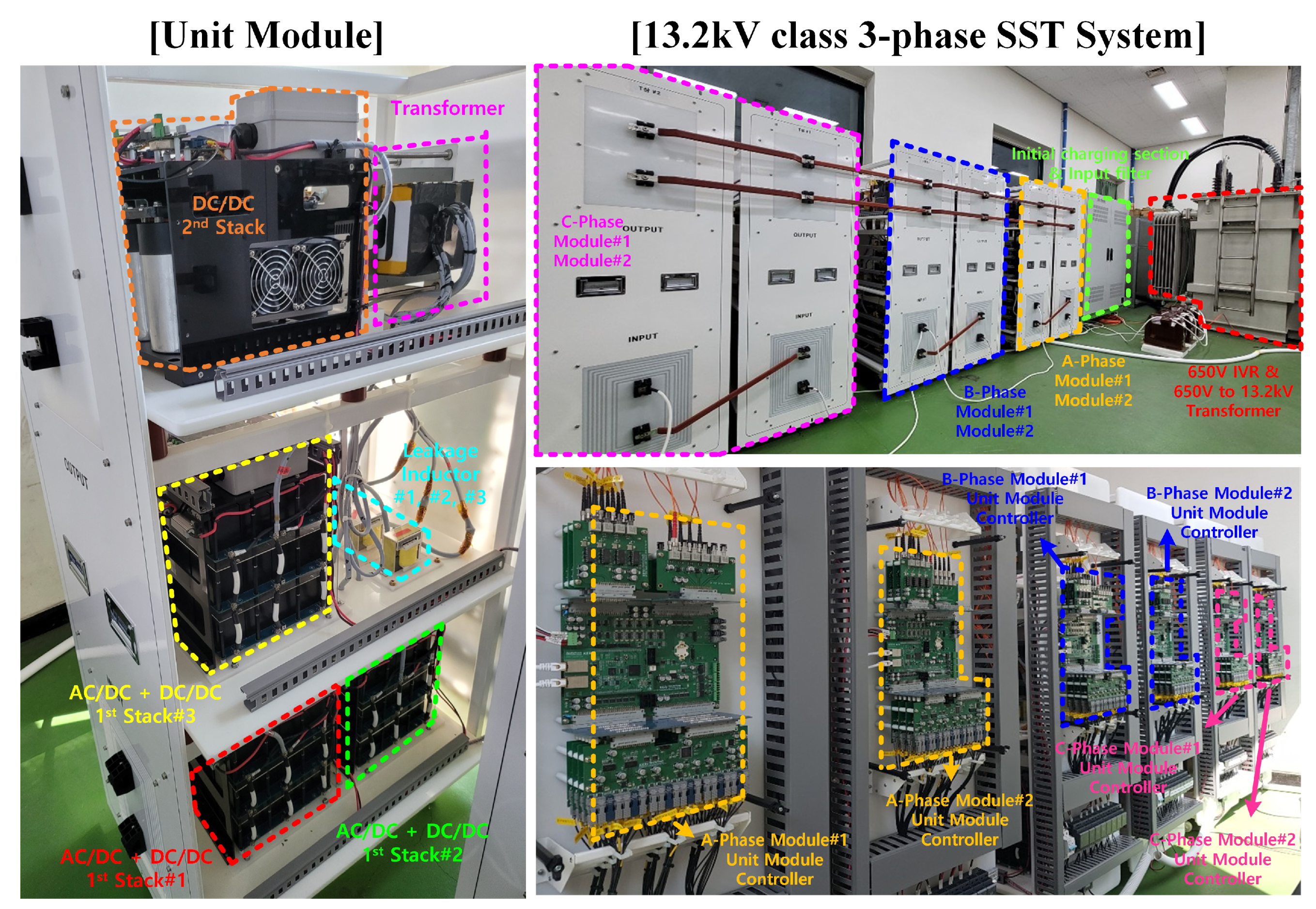
2.1. A Proposed Unit Module Based on QAB Converter
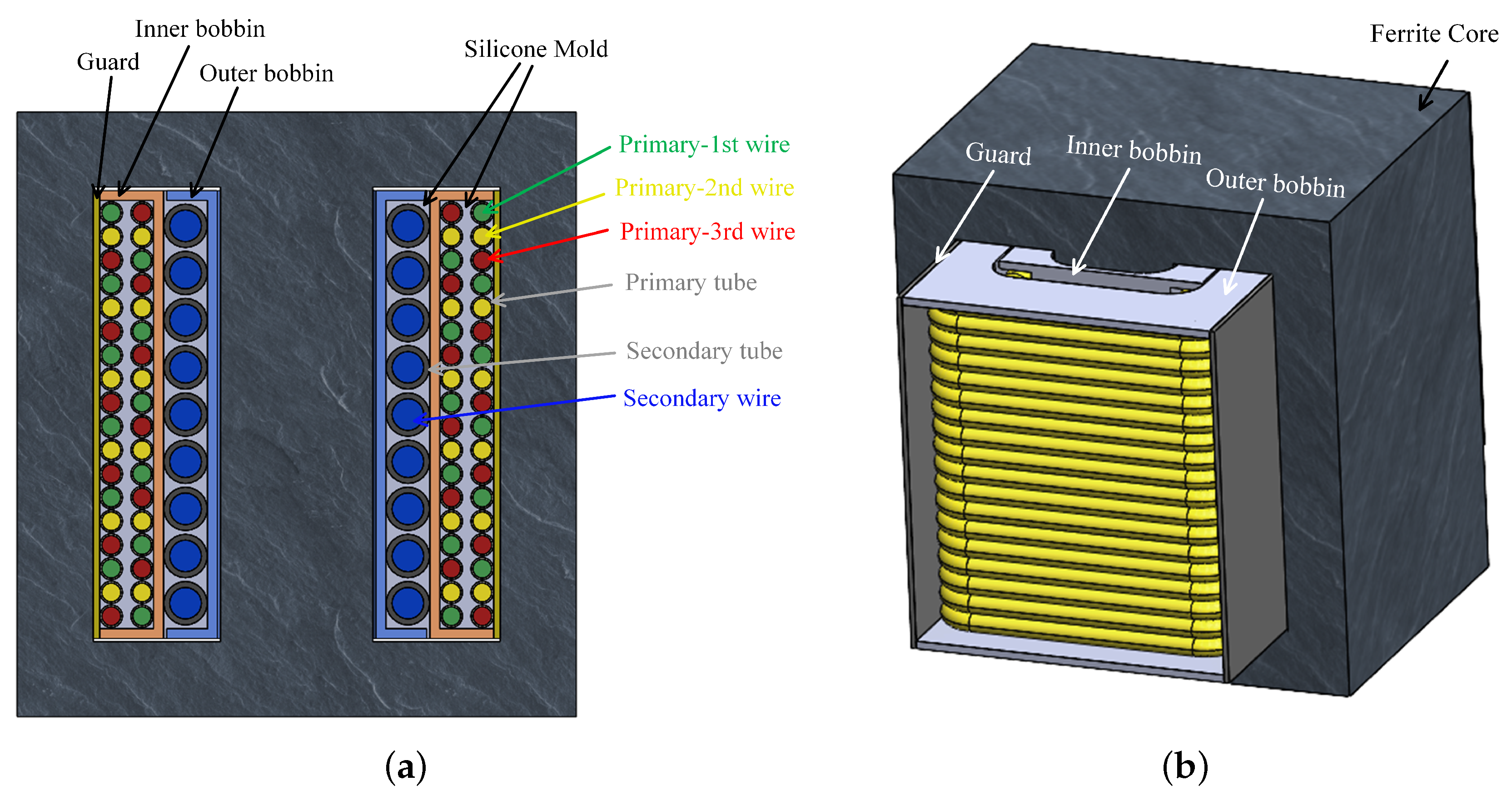
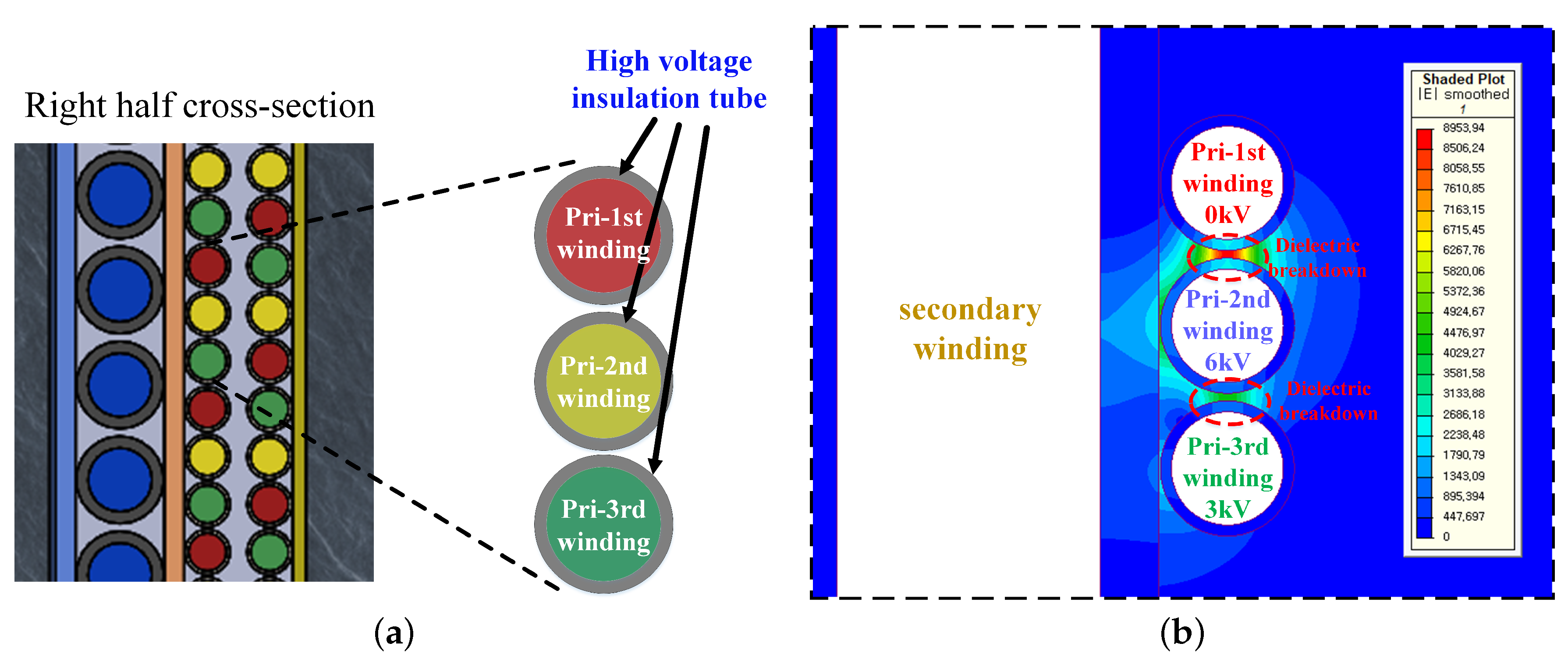
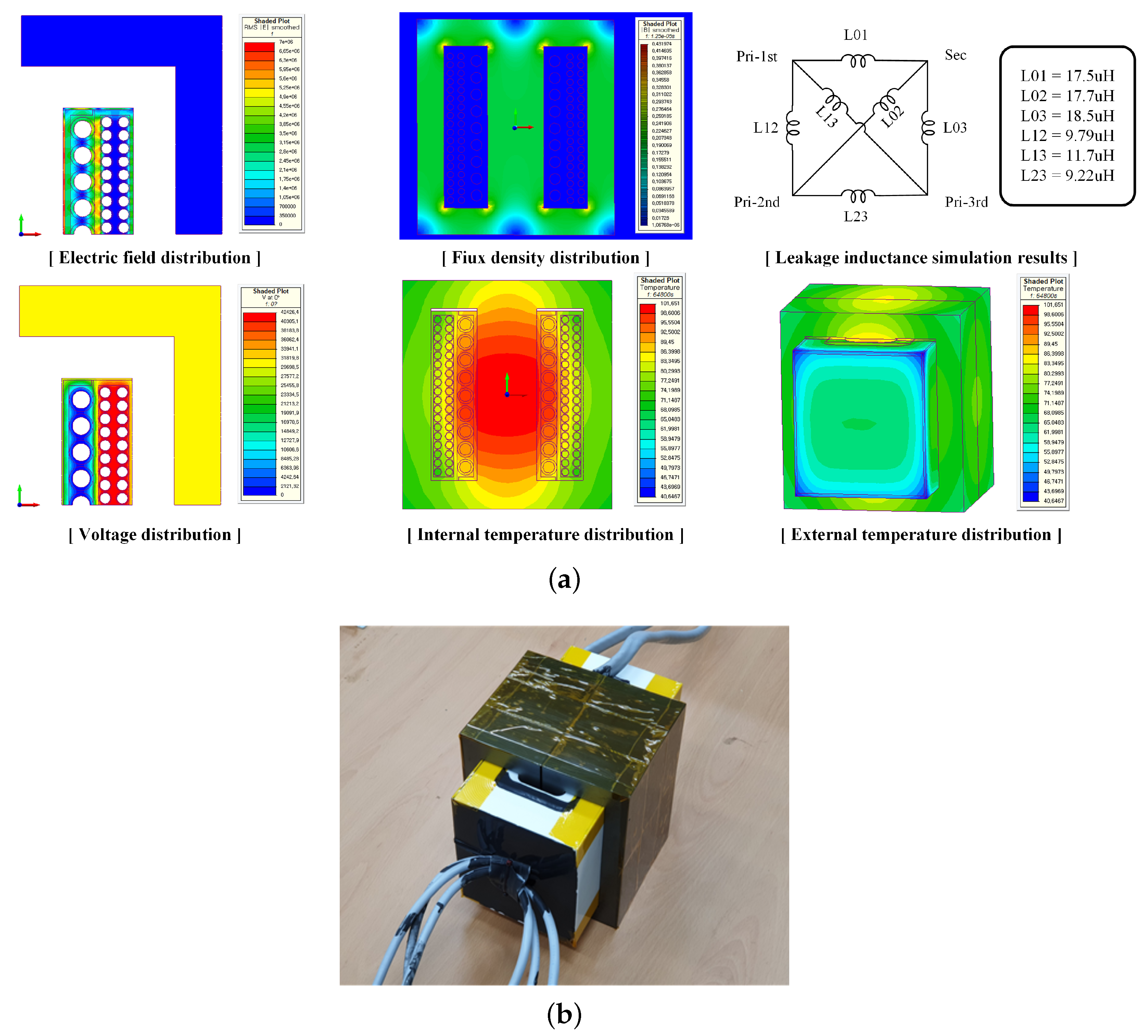
2.2. High-Voltage Isolated High-Frequency Transformer
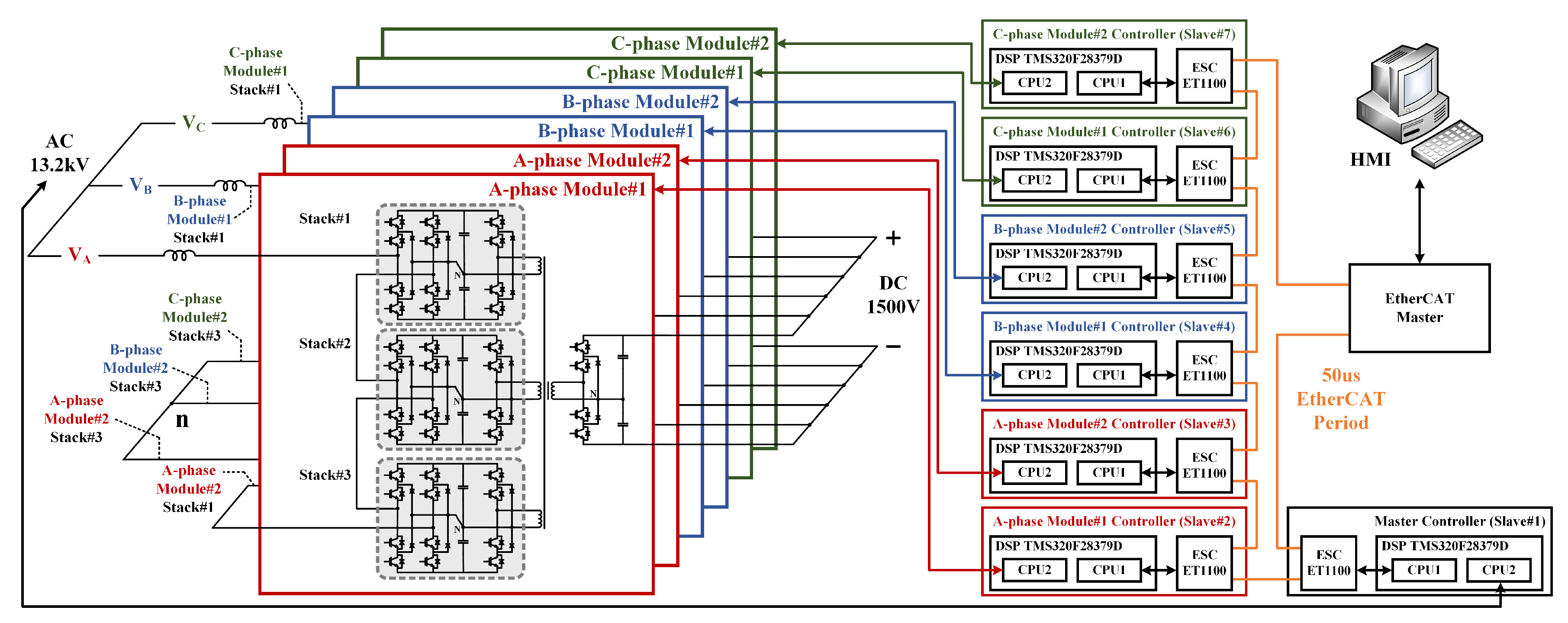
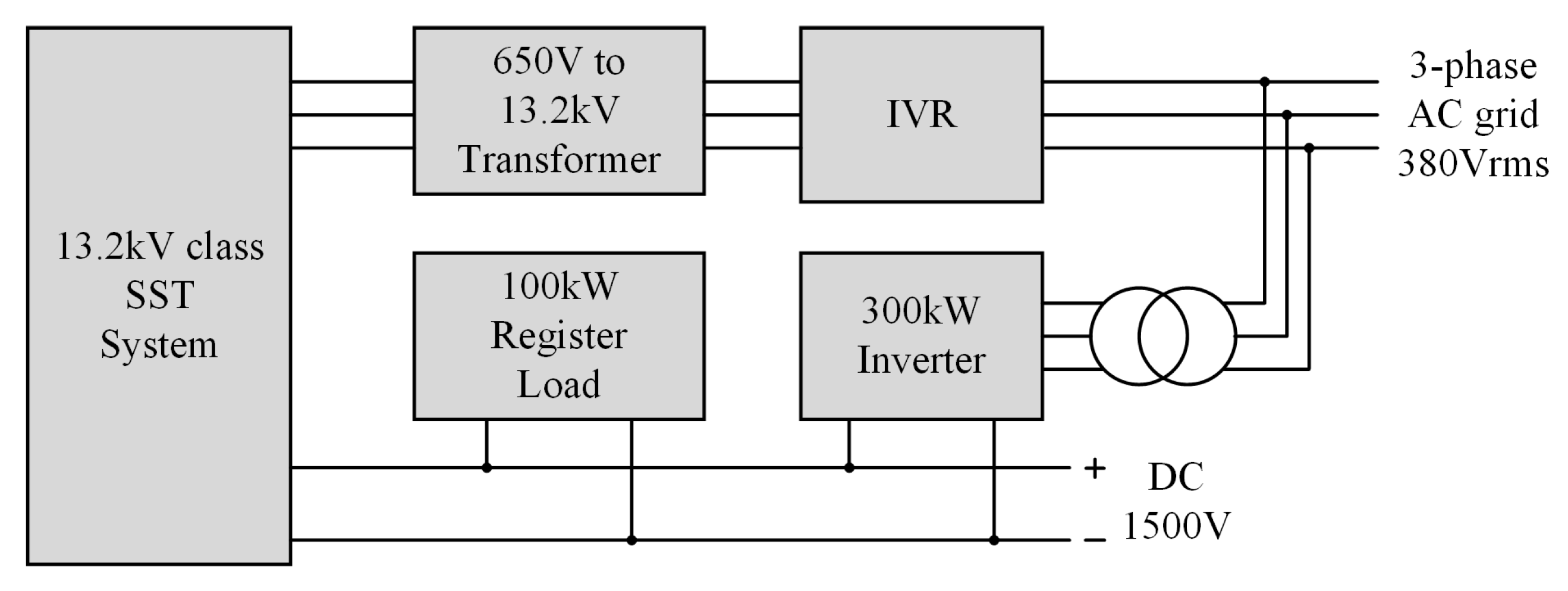
2.3. Configuration of a Proposed 3-Phase Solid State Transformer
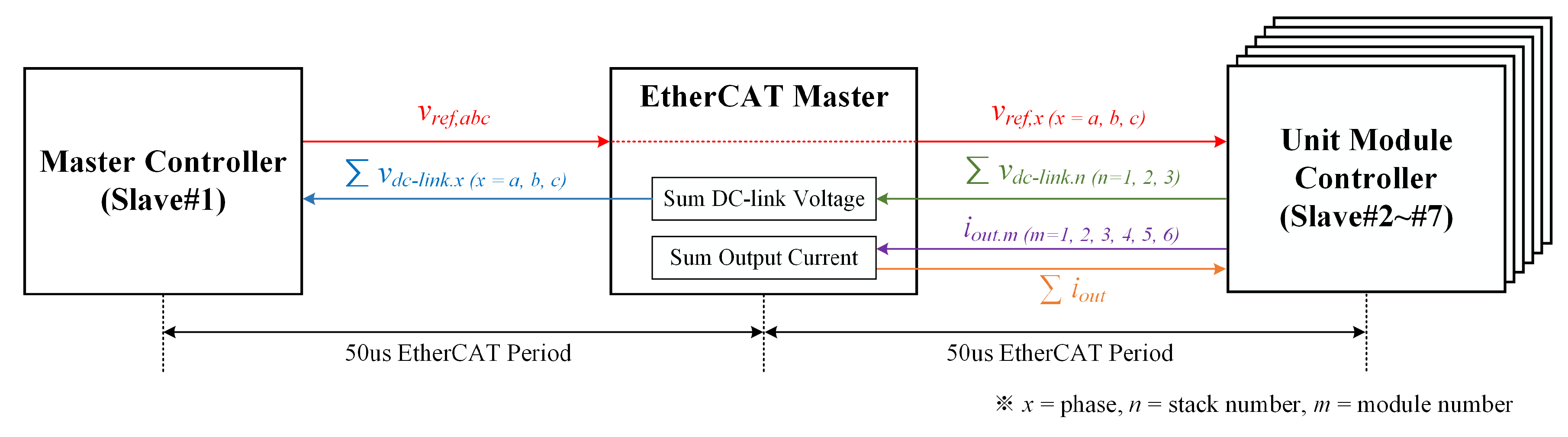
3. EtherCAT Communication Based Control System for a Solid State Transformer
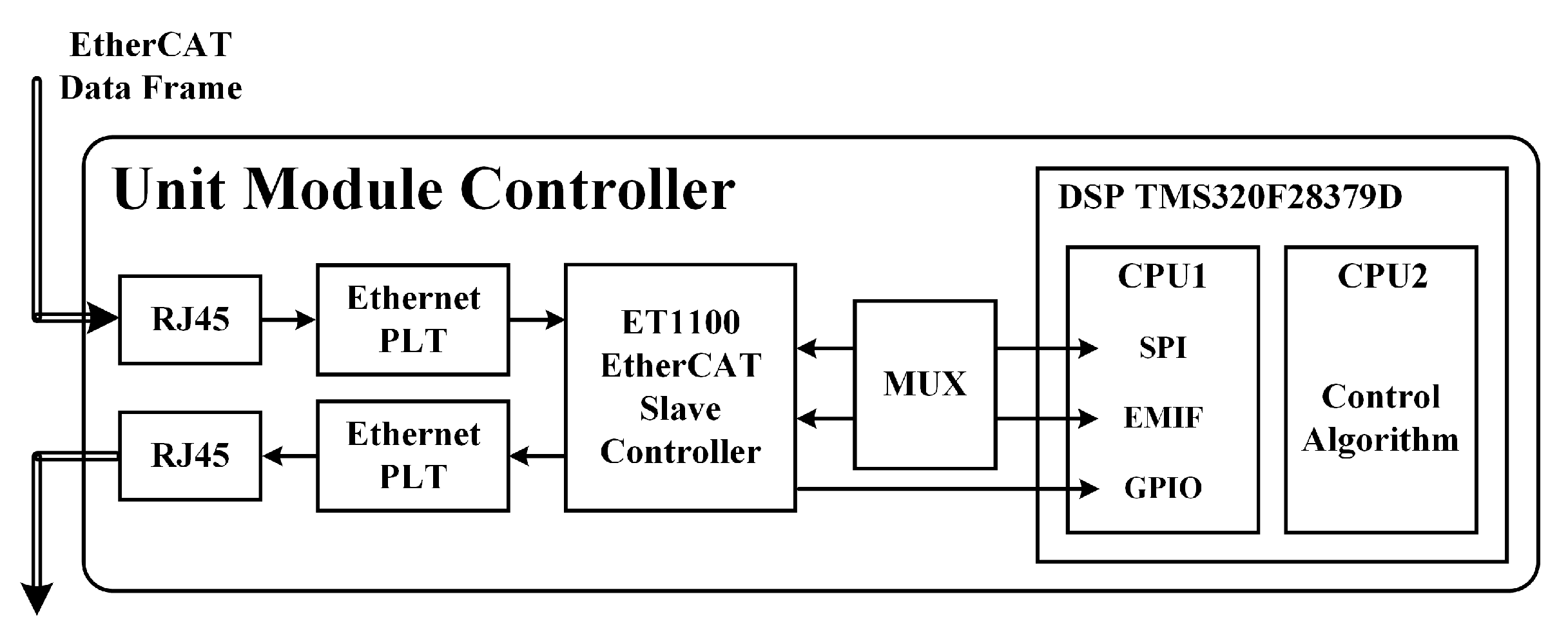
3.1. EtherCAT Communication Using Multi-Core MCU
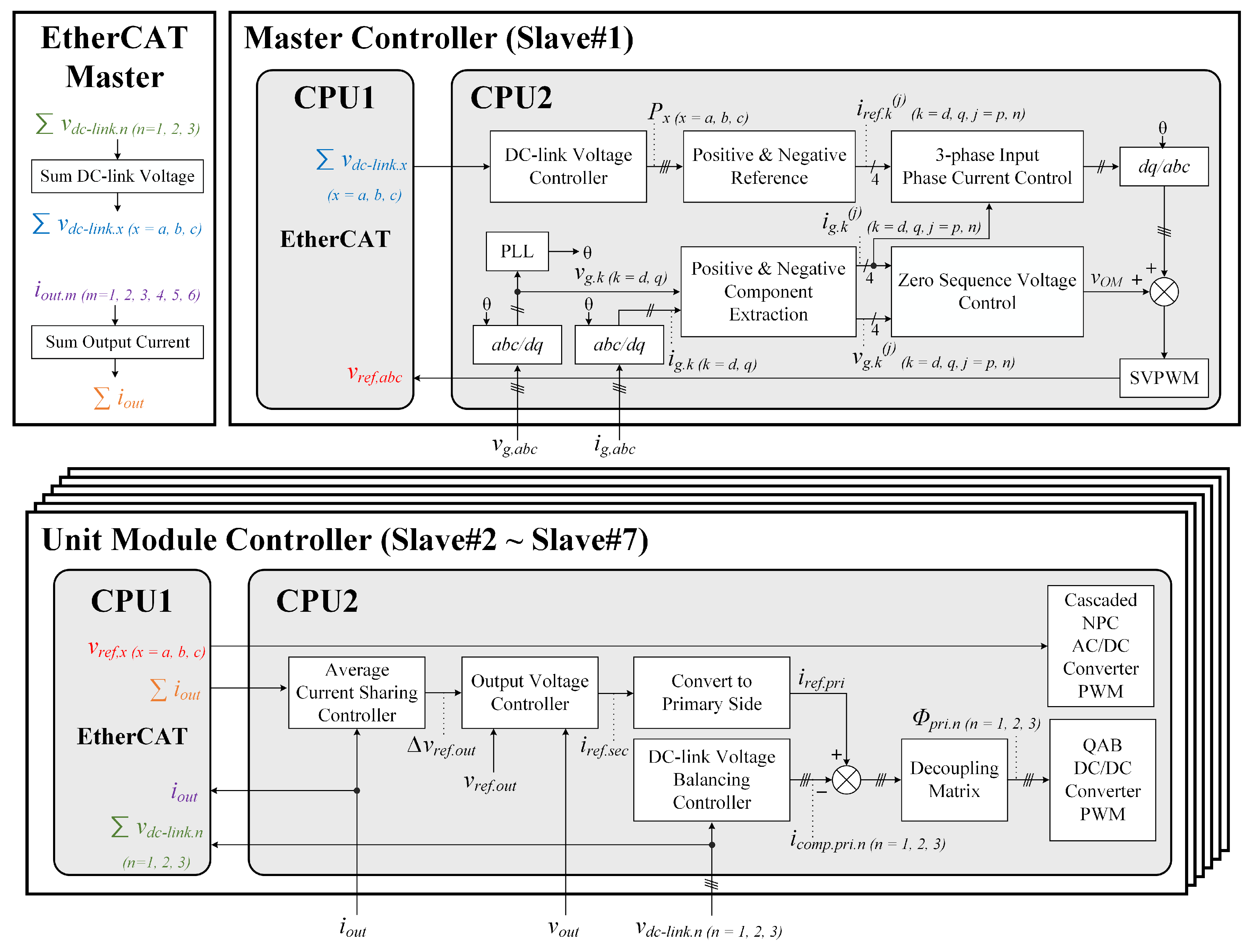
3.2. Control Strategy of the Solid State Transformer Using EtherCAT Communication
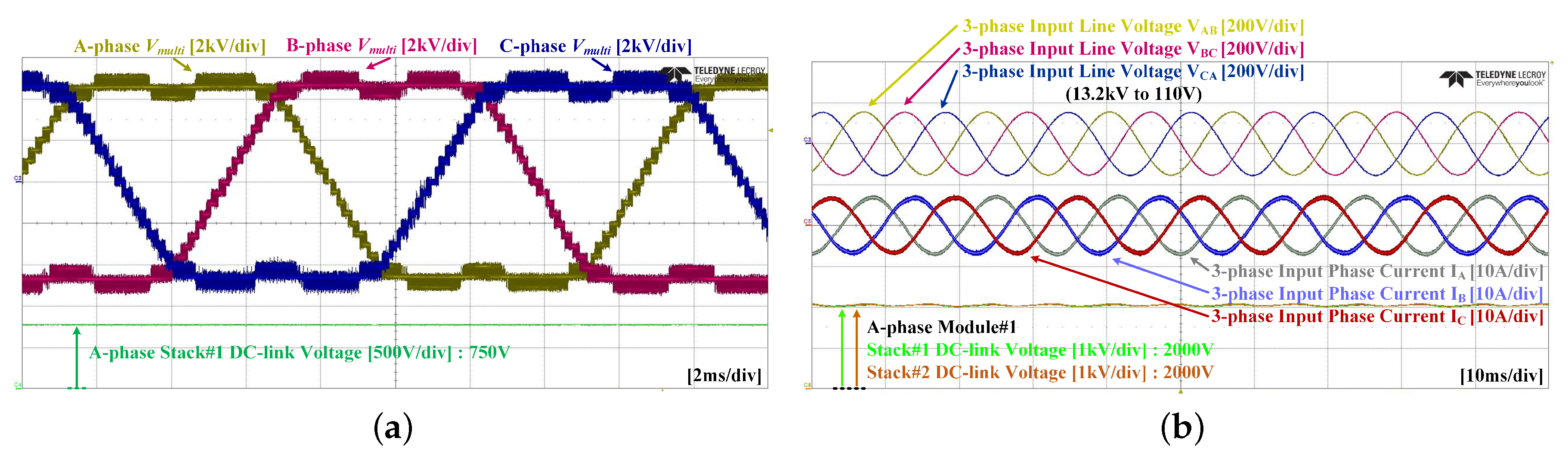
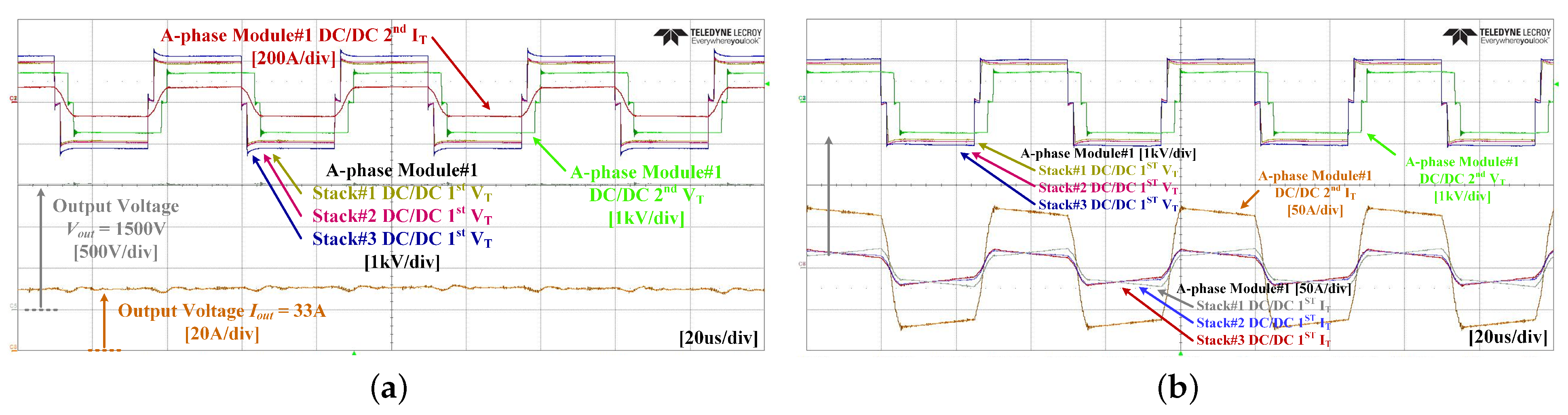
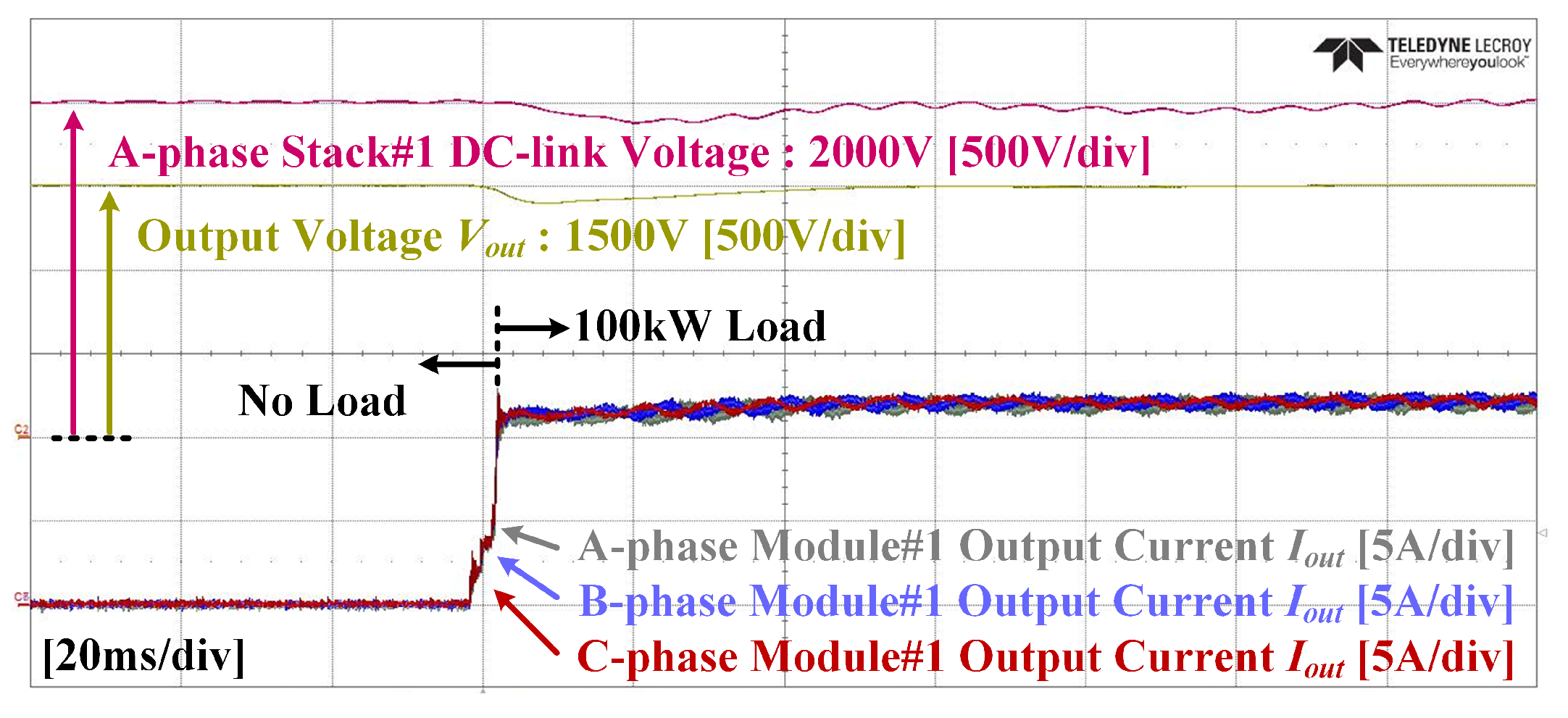
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CAN | Controller Area Network |
| DAB | Dual Active Bridge |
| EMIF | External Memory Interface |
| ESC | EtherCAT Slave Controller |
| HFIT | High-Frequency Isolated Transformer |
| MCU | Micro Controller Unit |
| NPC | Neutral Point Clamped |
| PT | Potential Transformer |
| QAB | Quadruple Active Bridge |
| SCI | Serial Communication Interface |
| SPI | Serial Peripheral Interface |
| SST | Solid State Transformer |
References
- Ronan, E.R.; Sudhoff, S.D.; Glover, S.F.; Galloway, D.L. A power electronic-based distribution transformer. IEEE Trans. Power Deliv. 2002, 17, 537–543. [Google Scholar] [CrossRef]
- Lai, J.-S.; Maitra, A.; Mansoor, A.; Goodman, F. Multilevel intelligent universal transformer for medium voltage applications. In Proceedings of the Fourtieth IAS Annual Meeting. Conference Record of the 2005 Industry Applications Conference, Hong Kong, China, 2–6 October 2005; Volume 3, pp. 1893–1899. [Google Scholar]
- Fan, H.; Li, H. High frequency high efficiency bidirectional DC-DC converter module design for 10 kVA solid state transformer. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 210–215. [Google Scholar]
- Fan, H.; Li, H. A novel phase-shift bidirectional DC-DC converter with an extended high-efficiency range for 20 kVA solid state transformer. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 3870–3876. [Google Scholar]
- Huang, A.Q.; Crow, M.L.; Heydt, G.T.; Zheng, J.P.; Dale, S.J. The future renewable electric energy delivery and management (FREEDM) system: The energy internet. Proc. IEEE 2010, 99, 133–148. [Google Scholar] [CrossRef]
- Foureaux, N.C.; Adolpho, L.; Silva, S.M.; Brito, J.A.d.S.; Cardoso Filho, B.d.J. Application of solid state transformers in utility scale solar power plants. In Proceedings of the 2014 IEEE 40th Photovoltaic Specialist Conference (PVSC), Denver, CO, USA, 8–13 June 2014; pp. 3695–3700. [Google Scholar]
- Syed, I.; Khadkikar, V. Replacing the grid interface transformer in wind energy conversion system with solid-state transformer. IEEE Trans. Power Syst. 2016, 32, 2152–2160. [Google Scholar] [CrossRef]
- Qu, Z.; Yao, Y.; Wang, Y.; Zhang, C.; Chong, Z.; Abu-Siada, A. A novel unbalance compensation method for distribution solid-state transformer based on reduced order generalized integrator. IEEE Access 2019, 7, 108593–108603. [Google Scholar] [CrossRef]
- HKimura, N.; Morizane, T.; Iyoda, I.; Nakao, K.; Yokoyama, T. Solid state transformer investigation for HVDC transmission from offshore windfarm. In Proceedings of the 2017 IEEE 6th International Conference on Renewable Energy Research and Applications (ICRERA), San Diego, CA, USA, 5–8 November 2017; pp. 574–579. [Google Scholar]
- Huber, J.E.; Kolar, J.W. Solid-state transformers: On the origins and evolution of key concepts. IEEE Ind. Electron. Mag. 2016, 10, 19–28. [Google Scholar] [CrossRef]
- Feng, J.; Chu, W.Q.; Zhang, Z.; Zhu, Z.Q. Power electronic transformer-based railway traction systems: Challenges and opportunities. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1237–1253. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, Y.; Long, Y.; Xu, S.; Siddique, A. Hybrid-frequency cascaded full-bridge solid-state transformer. IEEE Access 2019, 7, 22118–22132. [Google Scholar] [CrossRef]
- Huang, A.Q.; Zhu, Q.; Wang, L.; Zhang, L. 15 kV SiC MOSFET: An enabling technology for medium voltage solid state transformers. CPSS Trans. Power Electron. Appl. 2017, 2, 118–130. [Google Scholar] [CrossRef]
- Madhusoodhanan, S.; Tripathi, A.; Patel, D.; Mainali, K.; Kadavelugu, A.; Hazra, S.; Bhattacharya, S.; Hatua, K. Solid-state transformer and MV grid tie applications enabled by 15 kV SiC IGBTs and 10 kV SiC MOSFETs based multilevel converters. IEEE Trans. Ind. Appl. 2015, 51, 3343–3360. [Google Scholar] [CrossRef]
- Tripathi, A.K.; Mainali, K.; Patel, D.C.; Kadavelugu, A.; Hazra, S.; Bhattacharya, S.; Hatua, K. Design considerations of a 15-kV SiC IGBT-based medium-voltage high-frequency isolated DC–DC converter. IEEE Trans. Ind. Appl. 2015, 51, 3284–3294. [Google Scholar] [CrossRef]
- Rehman, A.; Ashraf, M. Design and analysis of PWM inverter for 100KVA solid state transformer in a distribution system. IEEE Access 2019, 7, 140152–140168. [Google Scholar] [CrossRef]
- Li, Z.; Wang, P.; Chu, Z.; Zhu, H.; Sun, Z.; Li, Y. A three-phase 10 kVAC-750 VDC power electronic transformer for smart distribution grid. In Proceedings of the 2013 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September 2013; pp. 1–9. [Google Scholar]
- Briz, F.; López, M.; Rodríguez, A.; Zapico, A.; Arias, M.; Díaz-Reigosa, D. MMC based SST. In Proceedings of the 2015 IEEE 13th International Conference on Industrial Informatics (INDIN), Cambridge, UK, 22–24 July 2015; pp. 1591–1598. [Google Scholar]
- Glinka, M.; Marquardt, R. A new AC/AC multilevel converter family. IEEE Trans. Ind. Appl. 2005, 52, 662–669. [Google Scholar] [CrossRef]
- Jang, Y.-N.; Park, J.-W. Circulating Current Suppression of Hybrid Modular Multilevel Converter with Improved Nearest Level Modulation. In Proceedings of the 2019 34th International Technical Conference on Circuits/Systems, Computers and Communications (ITC-CSCC), JeJu, Korea, 23–26 June 2019; pp. 1–4. [Google Scholar]
- Corrêa, T.P.; Almeida, L.; Rodriguez, F.J. Communication aspects in the distributed control architecture of a modular multilevel converter. In Proceedings of the 2018 IEEE International Conference on Industrial Technology (ICIT), Lyon, France, 19–22 February 2018; pp. 640–645. [Google Scholar]
- The, A.; Bruening, C.; Dieckerhoff, S. CAN-based distributed control of a MMC optimized for low number of submodules. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 1590–1594. [Google Scholar]
- Wang, D.; Tian, J.; Mao, C.; Lu, J.; Duan, Y.; Qiu, J.; Cai, H. A 10-kV/400-V 500-kVA electronic power transformer. IEEE Trans. Ind. Appl. 2016, 63, 6653–6663. [Google Scholar] [CrossRef]
- IEEE Std C57. 12.01-2020; IEEE Standard for General Requirements for Dry-Type Distribution and Power Transformers. IEEE: New York, NY, USA, 2020; pp. 1–49. [Google Scholar]
- Maruyama, T.; Yamada, T. Spatial-temporal communication redundancy for high performance EtherCAT master. In Proceedings of the 2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Limassol, Cyprus, 12–15 September 2017; pp. 1–6. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Basic | Proposed | Number of Components | |
|---|---|---|---|
| Unit Module | Unit Module | Difference | |
| Isolated Transformer | 3 | 1 | 2 |
| Switching Device | 48 | 40 | 8 |
| Clamp Diode | 24 | 20 | 4 |
| Capacitor | 12 | 8 | 4 |
| Voltage Sensor | 12 | 8 | 4 |
| Current Sensor | 3 | 1 | 2 |
| Rated Power | 50 kVA | Frequency | 20 kHz |
| Voltage | 1 kV (3-Input each) | Current | 20.3 A (3-Input each) |
| 750 V (Output) | 81.4 A (Output) | ||
| Core material | Ferrite UU-84 | No.core | 3-pair * 2-parallel |
| Wirespecification | 0.12 mm, 1100 stands (Pri) | B | 0.359 Tesla |
| 0.12 mm, 3200 stands (Sec) | |||
| Turns | 12:12:12:9 | Input tube | ST-40DG-1 |
| Primary wire tube | GSHS-1635F, 3/8 inch | Output tube | ST-80DG-1 |
| Mold material | Sylgard-170 A&B | Bobbin material | Teflon PTFE |
| Size | 168 m (L) * 248 m (D) * 184 m (H) | Loss (Rated power) | Total 138.7 W |
| Parameter | Value |
|---|---|
| Input voltage () | 13.2k [] |
| Output voltage () | 1.5 [] |
| Rated power () | 300 [kW] |
| Filter inductor () | 20 [mH] |
| DC-link capacitor () | 480 [uF] |
| Output capacitor () | 560 [uF] |
| Number of unit power modules | 6 |
| DC-link voltage () | 2 [] |
| Switching frequency for AC/DC | 10 [kHz] |
| Switching frequency for DC/DC | 20 [kHz] |
| Turn ratio () | 1:0.6667 |
| Switching device for AC/DC | C2M0045170D |
| Switching device for MVDC | C2M0045170D |
| Switching module for LVDC | CAS120M12BM2 |
| EtherCAT Frame | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Master Controller | Unit Module Controller × 6 | ||||||||||||
| Sequence | Master Fault | Unit Module | Total | Sequence | Unit Module Fault | ||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, D.-K.; Yun, H.-J.; Park, S.-H.; Kim, M.-H.; Ryu, M.-H.; Baek, J.-W.; Kim, H.-S. 13.2 kV Class 3-Phase Solid State Transformer System Based on EtherCAT Communication. Electronics 2022, 11, 3092. https://doi.org/10.3390/electronics11193092
Jeong D-K, Yun H-J, Park S-H, Kim M-H, Ryu M-H, Baek J-W, Kim H-S. 13.2 kV Class 3-Phase Solid State Transformer System Based on EtherCAT Communication. Electronics. 2022; 11(19):3092. https://doi.org/10.3390/electronics11193092
Chicago/Turabian StyleJeong, Dong-Keun, Hyeok-Jin Yun, Si-Ho Park, Myoung-Ho Kim, Myung-Hyo Ryu, Ju-Won Baek, and Ho-Sung Kim. 2022. "13.2 kV Class 3-Phase Solid State Transformer System Based on EtherCAT Communication" Electronics 11, no. 19: 3092. https://doi.org/10.3390/electronics11193092