
Abstract
Herein we explore the non-equatorial constant-r (“quasi-circular”) geodesics (both timelike and null) in the Painlevé–Gullstrand variant of the Lense–Thirring spacetime recently introduced by the current authors. Even though the spacetime is not spherically symmetric, shells of constant-r geodesics still exist. Whereas the radial motion is (by construction) utterly trivial, determining the allowed locations of these constant-r geodesics is decidedly non-trivial, and the stability analysis is equally tricky. Regarding the angular motion, these constant-r orbits will be seen to exhibit both precession and nutation — typically with incommensurate frequencies. Thus this constant-r geodesic motion, though integrable in the precise technical sense, is generically surface-filling, with the orbits completely covering a symmetric equatorial band which is a segment of a spherical surface, (a so-called “spherical zone”), and whose latitudinal extent is governed by delicate interplay between the orbital angular momentum and the Carter constant. The situation is qualitatively similar to that for the (exact) Kerr spacetime — but we now see that any physical model having the same slow-rotation weak-field limit as general relativity will still possess non-equatorial constant-r geodesics.
Similar content being viewed by others

1 Introduction
The Kerr spacetime [1,2,3,4,5,6], perhaps the pre-eminent exact solution of the Einstein equations of vacuum general relativity, is both a standard textbook exemplar [7,8,9,10,11,12,13,14], and is increasingly of central importance to both observational and theoretical astrophysics [15,16,17,18,19,20,21]. One key issue of particular importance is a full understanding of the geodesics — and the fact that despite the lack of spherical symmetry (the Kerr spacetime is merely stationary and axisymmetric, so that the Birkhoff theorem does not apply [22,23,24,25,26]), there are still a multitude of constant-r “quasi-circular” geodesics which are not confined to the equatorial plane. (Contrast, for example, the discussion in [27] with that of [28,29,30,31,32].) Sometimes these constant-r “quasi-circular” geodesics are referred to as “spherical geodesics”.
It should be noted that the non-equatorial constant-r null geodesics are particularly important tools for studying photon rings and black hole silhouettes [33,34,35,36,37,38]. Similarly non-equatorial constant-r timelike geodesics are particularly important tools for studying off-axis accretion disks and their related ISCOs and OSCOs [39,40,41,42,43].
In the current article we shall be interested is seeing how much of this qualitative structure survives once one moves away from the exact Kerr spacetime, specifically once one considers the Painlevé–Gullstrand version of the weak-field slow-rotation Lense–Thirring spacetime. The weak-field slow-rotation Lense–Thirring spacetime was originally introduced in 1918 [44, 45], while the current authors have recently introduced, and extensively explored, a novel Painlevé–Gullstrand variant [46,47,48,49,50,51] of the Lense–Thirring spacetime [52,53,54]. We shall soon see that the generic situation is as pictured in Fig. 1. The key physical reason underpinning the existence of these constant-r geodesics comes from the fact that the Kerr, Schwarzschild, and Painlevé–Gullstrand–Lense–Thirring spacetimes all possess a non-trivial Killing tensor and associated Carter constant.

Schematic depiction of the generic situation, where the constant-r geodesics have incommensurate azimuthal and declination frequencies, and so sweep out a surface-filling symmetric equatorial band, (a spherical zone). The width of the equatorial band is controlled by a delicate interplay between the Carter constant and the azimuthal angular momentum
2 Basic framework
The line-element of interest is [52,53,54]:
This line-element is somewhat related to the “river” model for black holes [55] — it exhibits both unit lapse [56], and flat spatial 3-slices [52,53,54] — the presence of flat spatial 3-slices being incompatible with the exact Kerr spacetime [57,58,59,60]. Furthermore this line element possesses a non-trivial Killing tensor [53, 54]:
This Killing tensor was found by applying the algorithm presented in [61,62,63]. Once found, one can easily verify that \(\nabla _{(c}K_{ab)}= K_{(ab;c)} = 0\). For any affine parameter \(\lambda \), the (generalized) Carter constant is then [53, 54]:
By construction \(\mathcal {C}\ge 0\). Without loss of generality we choose \(\lambda \) to be future-directed, \({\mathrm {d}}t/{\mathrm {d}}\lambda > 0\).
In addition to the Carter constant, we have three other conserved quantities. Two (the energy and azimuthal component of angular momentum) come from the time-translation and axial Killing vectors [53, 54]:
The final conserved quantity, the “mass-shell constraint”, \(\epsilon \in \{0,-1\}\) for null and timelike geodesics respectively, comes from the trivial Killing tensor (the metric):
Simplify these four conserved quantities by re-writing them as follows [53, 54]:
In particular \(L^2 \le \mathcal {C}\). For (generic) geodesic trajectories we have [53, 54]:
Here
Furthermore X(r) is explicitly given by the sextic Laurent polynomial:
In terms of the roots of this polynomial we can in the generic case write
We shall now restrict attention to the constant-r orbits, \(r\rightarrow r_0\).
3 Location of possible constant-r geodesics
First let us analyze the lack of radial motion; this is not entirely trivial.
3.1 Generalities
Fix our r coordinate to take some fixed value \(r=r_0\). Hence, since \({\mathrm {d}}r/{\mathrm {d}}\lambda = S_r \sqrt{X(r)}\), we must have \(X(r_0)=0\). Furthermore, using the chain rule and the fact that \(S_r^2=+1\), we have
So to remain at \(r_0\) we must also have \(X'(r_0)=0\). The two conditions
imply that \(r_0\) is a repeated root of X(r). The existence of a repeated root will put some constraint on the four geodesic constants E, L, \(\epsilon \), and \(\mathcal {C}\), (and the spacetime parameters m and J); they cannot all be functionally independent.
Higher derivatives do not lead to extra constraints, since
and one sees inductively that all terms in all higher-order derivatives contain either \(\sqrt{X(r)}\) or \(X'(r)\) as a factor; quantities which we have already seen vanish at \(r\rightarrow r_0\). Finally we note that stability of the constant-r orbit is determined by considering
Thence if \(X''(r_0) >0\) the constant-r orbit is unstable, if \(X''(r_0) =0\) the constant-r orbit is marginal, and if \(X''(r_0) <0\) the constant-r orbit is stable. So we are interested in evaluating \({\mathrm {sign}}\left( X''(r_0)\right) \). Let us now see what more we can say about the radial location of possible constant-r (“quasi-circular”) orbits.
3.2 Constant-r null geodesics
For massless particles following null geodesics we have \(\epsilon \rightarrow 0\), and without any loss of generality we can set \(E\rightarrow 1\). That implies that we can write
while
and
Thence we are interested in simultaneously solving
and evaluating the sign of \(X''(r_0)\):
The non-negativity of \(\mathcal {C}\ge 0\), applied to \(X(r_0)=0\), from Eq. (3.6) immediately implies that \(r_0 \ge 2m\). We also recall that \(L^2 \le \mathcal {C}\). The four quantities \(\mathcal {C}\), m, JL, and \(r_0\), are subject to two constraints, so only two of these four quantities are functionally independent. More on this point below.
Since we are interested in the sign of \(X''(r_0)\) at a location where \(X'(r_0)=0\), we can use that extra information to deduce
Thus there are no stable constant-r null geodesics. (And, as we shall soon see, there are no marginal constant-r null geodesics either, all of the constant-r null geodesics are unstable.)
Let us now consider several special case solutions to the radial part of the constant-r null geodesic conditions, \(X(r_0)=0=X'(r_0)\):
-
(i)
If \(JL=0\), corresponding either to a non-rotating source, or to a zero angular momentum geodesic (ZAMO), then one has the unique unstable constant-r null geodesic:
$$\begin{aligned} r_0 = 3m; \qquad \mathcal {C}= 27 m^2; \qquad X''(r_0) = {2\over 3 m^2} = {6\over r_0^2} > 0. \end{aligned}$$(3.14)This is the situation familiar from Schwarzschild spacetime; an unstable photon orbit at \(r=3m\).
-
(ii)
If \(\mathcal {C}=0\), then \(L=0\), and there are no constant-r null orbits.
-
(iii)
If \(r_0=2m\) then this implies \(\mathcal {C}=0\). This is a sub-case of (ii) above.
-
(iv)
If \(r_0=3m\) then: either \(JL=0\) which is a sub-case of (i) above, or \(\mathcal {C}=0\) which is a sub-case of (ii) above.
-
(v)
If \(r_0= \root 3 \of {2JL}\ne 0\) then \(\mathcal {C}<0\), which is non-viable, and there are no constant-r null orbits.
-
(vi)
The generic case is \(JL\ne 0\), \(\mathcal {C}>0\) and \(2m < r_0 \not \in \{3m, \root 3 \of {2JL}\}\).
Now let us consider the generic case:
Treat m and \(r_0\) as the two independent variables; then we can explicitly solve for \(\mathcal {C}(m,r_0)\) and \(2JL(m,r_0)\). Let us proceed as follows: If \(JL\ne 0\) then first solve \(X'(r_0)=0\) to find \(\mathcal {C}(JL,m, r_0)\). We find
Using this value of \(\mathcal {C}(JL,m, r_0)\), solve \(X(r_0)=0\) for \(2JL(m, r_0)\):
Third, substitute these values of \(JL(m, r_0)\) back into \(\mathcal {C}(JL,m, r_0)\) to yield \(\mathcal {C}(m, r_0)\):
Since we must always have \(\mathcal {C}> 0\) this limits the generic constant-r photon orbits to the range \(r_0 \in (2m,\infty )\). Finally, inserting this back into \(X''(r_0)\) we see:
Since \(X''(r_0)>0\), we again see that all of these constant-r photon orbits are unstable. That is, instead of just having one unstable photon orbit at \(r=3m\), once we allow \(JL\ne 0\) we can arrange unstable photon orbits at arbitrary \(r_0 \in (2m,\infty )\).
3.3 Constant-r timelike geodesics
For massive particles following timelike geodesics \(\epsilon \rightarrow -1\), and E is unconstrained. That implies that we can write
Rewrite this as
As before we are interested in solving \(X(r_0)=0=X'(r_0)\), and determining the sign of \(X''(r_0)\). So we are interested in studying
The five quantities E, \(\mathcal {C}\), m, JL, and \(r_0\) are subject to two constraints, so only three of these quantities can be functionally independent. The positivity of \((1+\mathcal {C}/r^2)>0\), applied to \(X(r_0)=0\), immediately implies \(r_0 \ge 2m\). There are several ways of proceeding.
Let us now consider several special case solutions to \(X(r_0)=0=X'(r_0)\):
-
(i)
If \(JL=0\), corresponding either to a non-rotating source, or to a zero angular momentum geodesic (ZAMO), then for constant-r orbits one has:
$$\begin{aligned} \mathcal {C}= {mr_0^2\over r_0-3m} ; \qquad E^2 = {(r_0-2m)^2\over r_0(r_0-3m)}; \end{aligned}$$(3.28)and
$$\begin{aligned} X''(r_0) = -{2m\over r_0^3} \; {r_0-6m\over r_0-3m}. \end{aligned}$$(3.29)Positivity of \(\mathcal {C}\) and/or \(E^2\) implies \(r_0\ge 3m\), and \(X''(r_0)\) changes sign at \(r_0=6m\). This is the situation familiar from Schwarzschild spacetime; an ISCO at \(r=6m\), stable orbits for \(r_0\in (6m,\infty )\), and unstable orbits for \(r_0\in (3m,6m)\). Note that for these constant-r orbits \(E<1\) for \(r_0>4m\), \(E=1\) for \(r_0=4m\), and \(E>1\) for \(r_0\in (3m,4m)\). Indeed \(E\rightarrow \infty \) as \(r_0\rightarrow (3m)^+\).
-
(ii)
If \(\mathcal {C}=0\), then automatically \(L=0\), and there is no consistent solution.
-
(iii)
If \(r_0<2m\) then \(X(r_0)\) is a sum of positive and non-negative terms, so there is no consistent solution.
-
(iv)
If \(r_0=2m\), then from \(X(r_0)=0\) we have \(E = JL/(4 m^2)\), but then from \(X'(r_0)=0\) we have \(\mathcal {C}=- 4 m^2 <0\), and so there is no consistent solution.
-
(v)
If \(r_0= \root 3 \of {2JL/E}\ne 0\) and \(r_0> 2m\) then \(X(r_0)=0\) implies \(1+\mathcal {C}/r_0^2=0\), so that \(\mathcal {C}=-r_0^2<0\) and there is no consistent solution.
-
(vi)
The generic case is \(JL\ne 0\), \(\mathcal {C}>0\) and \(2m < r_0 \ne \root 3 \of {2JL/E}\).
Now consider the general case:
Choose the three independent variables to be m, E, and \(r_0\). Let us solve for \(\mathcal {C}(m,E,r_0)\) and \(JL(m,E,r_0)\). First take linear combinations of (3.25) and (3.26) to obtain:
Solve the first of these equations for \(\mathcal {C}\) to find
Inserting this back into the second equation and solving for JL one finds
Since JL must be real one in turn deduces \(E^2> {8\over 9} -{4m\over 3 r_0}> {2\over 9}\). However, the sign of JL is not constrained; so both roots (±) are valid.
Inserting this back into \(\mathcal {C}(JL,m,E,r_0)\) we see
The reality conditions for \(\mathcal {C}(m;E,r_0)\) are the same as they were for \(JL(m;E,r_0)\), that is, \(E^2> {8\over 9} -{4m\over 3 r_0}> {2\over 9}\). To enforce positivity of \(\mathcal {C}(m;E,r_0)\), both roots (±) are acceptable when \(E^2 \le {(3r_0-5m)^2\over 9r_0(r_0-2m)}\), but only the + root is acceptable outside this range.
Then to determine stability one must determine the sign of:
That is:
In short, there will be many constant-r orbits, but determining the stability of these constant-r orbits as functions of the independent parameters \((m,E,r_0)\) will be extremely tedious.
4 General angular motion for constant-r orbits
Now that we have investigated acceptable values of the parameters \(\{\mathcal {C},JL,E,m\}\) and the radius \(r_0\) for constant-r orbits, we note that two of the the four constants of the motion reduce to
Thence for the constant-r geodesic trajectories
We immediately see that t is an affine parameter, that the declination \(\theta (\lambda )\) evolves independently of the azimuth \(\phi (\lambda )\), and that the azimuthal motion depends on a constant drift and a fluctuating term driven by the declination. Note that the angular motion is qualitatively unaffected by the difference between timelike and null.
5 Declination for constant-r orbits (\(L\ne 0\))
Consider the ODE controlling the evolution of the declination \(\theta (\lambda )\).
5.1 Forbidden declination range
The form of the Carter constant, Eq. (2.8), gives a range of forbidden declination angles for any given, non-zero values of \(\mathcal {C}\) and L. We require that \({\mathrm {d}}\theta /{\mathrm {d}}\lambda \) be real, and from Eq. (2.8) this implies the following requirement:
Then provided \(\mathcal {C}\ge L^2\), which is automatic in view of (2.8), we can define a critical angle \(\theta _* \in [0,\pi /2]\) by setting
Then the allowed range for \(\theta \) is the equatorial band:
-
For \(L^2=\mathcal {C}\) we have \(\theta =\pi /2\); the motion is restricted to the equatorial plane.
-
For \(L=0\) with \(\mathcal {C}>0\) the range of \(\theta \) is a priori unconstrained; \(\theta \in [0,\pi ]\).
-
For \(L=0\) with \(\mathcal {C}=0\) the declination is fixed \(\theta (\lambda )=\theta _{0}\), and the motion is restricted to a constant declination conical surface.
5.2 Evolution of the declination
As regards the declination angle \(\theta \), from Eq. (4.5), we find
implying

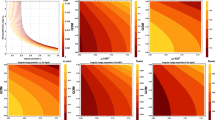
Qualitative behaviour of the declination \(\theta (\lambda )/\pi \) as it oscillates back and forth between \(\theta _*/\pi \) and \((\pi -\theta _*)/\pi \)
From this we see
that is
Without loss of generality we may allow the geodesic to reach the critical angle \(\theta _*\) at some affine parameter \(\lambda _*\), and then use that as our new initial data. This effectively sets \(\theta _0=\theta _*\), and gives us the following simple result:
Thence, using the fact that cosine is an even function of its argument:
For a qualitative plot of the declination angle as a function of affine parameter see Fig. 2. Note the motion is periodic, with period
In terms of the Killing time coordinate the period is
6 Azimuth for constant-r orbits (\(L\ne 0\))
Now consider the ODE for the evolution of the azimuthal angle \(\phi (\lambda )\). We have
and
Thence
The only tricky item here is evaluation of the integral
But it is easy to check that formally
Note that the LHS above is monotone increasing, while the RHS naively exhibits discontinuities whenever the tangent passes through infinity. Thence the correct statement is to observe that
Here \({\mathrm {floor}}[...]\) denotes the integer part (floor function) and the discontinuity in \({\mathrm {floor}}[...]\) exactly cancels the discontinuity due to the \(\arctan (...)\). In terms of the fractional part function \({\mathrm {frac}}[...]\) one has \(x = {\mathrm {floor}}[x] + {\mathrm {frac}}[x]\) so one could equally well write
Thence
Finally, using \(\mathcal {C}= L^2/\sin ^2\theta {_*}\), we have
So the azimuthal motion is a constant drift (growing linearly in the affine parameter) with a superimposed oscillation. Specifically the oscillatory term is
Note the sensible limit for equatorial motion as \(\sin \theta _*\rightarrow 1\). See Fig. 3 for a qualitative plot of the oscillating term, and Fig. 4 for a qualitative plot of the total phase (drift plus oscillation).

Qualitative behaviour of the oscillatory part \(\phi _{oscillation}(\lambda )\) of the azimuthal evolution as a function of the affine parameter

Qualitative behaviour of \(\phi (\lambda )\), the total azimuthal phase evolution (drift plus oscillation) as a function of the affine parameter
The oscillatory contribution to the azimuthal evolution has the same period as the evolution in declination
but the drift component has periodicity
so that
This drift in azimuth periodicity is typically incommensurate with the periodicity in declination, so the geodesics are surface filling and will eventually cover the entire equatorial band \(\theta \in [\theta _*,\pi -\theta _*]\). (See Fig. 1 for a qualitative description.)
7 Angular motion for \(L=0\) (Constant-r ZAMOS)
If we now consider the special case of constant-r orbits where \(L=0\), then \(\sin \theta _*\rightarrow 0\), so we need to be careful. The equations of motion reduce even further to:
So in this special case we find
Now \(\phi \) is defined only modulo \(2\pi \), but \(\theta \) is naively in \([0,\pi ]\). However if we formally drive it outside this range we just need to reset \(\phi \) by \(\pi \). That is, we can identify the points \((\theta +\pi ,\phi ) \equiv (\pi -\theta , \phi +\pi )\).
In view of the fact that for constant-r orbits with \(L=0\) the quantity
is a constant, we can also rewrite angular dependence as
Note the periodicities in azimuth and declination are
These are typically incommensurate, so these ZAMO curves are surface filling and will eventually cover the entire angular 2-sphere. (The equatorial band in Fig. 1 will expand to include both poles.)
8 Limit as \(J\rightarrow 0\)
Physically the limit \(J\rightarrow 0\) corresponds to switching off the angular momentum of the central object generating the gravitational field, so that the spacetime becomes Schwarzschild in Painlevé–Gullstrand coordinates; so for constant-r orbits we must recover the unstable photon sphere at \(r=3m\) and the ISCO at \(r=6m\). If not, something is very wrong.
For \(J\rightarrow 0\) the quantity X(r) simplifies to
8.1 Photon spheres
For massless particles \(\epsilon \rightarrow 0\), and without loss of generality we can set \(E\rightarrow 1\). This implies
and
There is a unique photon sphere at \(r_0=3m\). Then \(X(r_0) = 0 = 1 -\mathcal {C}/(3 r_0^2)\), that is \(\mathcal {C}=3 r_0^2\). We then see that \(X''(3m) = 2\mathcal {C}/(243 m^4) = 2/(81 m^2)> 0\), these photon orbits are unstable. This is exactly as it should be.
8.2 Massive particle spheres
For massive particles \(\epsilon \rightarrow -1\), that implies
and
Solve \(X'(r_0)=0\) to find \(\mathcal {C}(m,r_0)\):
Since \(\mathcal {C}\ge 0\), there will now be many constant-r orbits, all the way from \(r_0=\infty \) down to \(r_0=3m\). Use this to evaluate \(X''(m,r_0)\):
Inspecting the sign of \(X''(m,r_0)\), the constant-r orbits are stable for \(r_0>6m\), marginal for \(r_0=6m\), and unstable for \(r_0<6m\). This is exactly as it should be.
9 Conclusions
We have explored the existence of and properties of the constant-r (“quasi-circular”) geodesics in the recently introduced Painlevé–Gullstand variant of the Lense–Thirring spacetime [52,53,54]. We emphasize that although the underlying spacetime is not spherically symmetric, (only stationary and axisymmetric), so that the Birkhoff theorem does not apply [22,23,24,25,26], one nevertheless encounters (partial) spherical shells of constant-r geodesics; notably this behaviour is not limited to the (exact) Kerr spacetime, but also persists in the Painlevé–Gullstand variant of the Lense–Thirring spacetime. The persistence of existence of these constant-r (“quasi-circular”) geodesics is intimately related to the persistence of existence of a non-trivial Killing tensor and the associated Carter constant. Overall, we see that the Painlevé–Gullstand variant of the Lense–Thirring spacetime [52,53,54] exhibits many useful and interesting properties, and is well-adapted to direct confrontation with observational astrophysics.
From a wider perspective, these considerations can be viewed as an element of the study of modified black holes — alternative black holes to the standard Schwarzschild–Kerr family that are nevertheless carefully formulated so as to pass the most obvious observational tests, and so provide useful templates for driving observational astrophysics [64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79].
References
Kerr, Roy: Gravitational field of a spinning mass as an example of algebraically special metrics. Phys. Rev. Lett. 11, 237–238 (1963). https://doi.org/10.1103/PhysRevLett.11.237
Kerr, Roy: “Gravitational collapse and rotation”, published in: Quasi-stellar sources and gravitational collapse: Including the proceedings of the First Texas Symposium on Relativistic Astrophysics, edited by Ivor Robinson, Alfred Schild, and E.L. Schücking (University of Chicago Press, Chicago, 1965), pages 99–102. The conference was held in Austin, Texas, on 16–18 December (1963)
Newman, E., Couch, E., Chinnapared, K., Exton, A., Prakash, A., Torrence, R.: Metric of a Rotating, Charged Mass. J. Math. Phys. 6, 918 (1965). https://doi.org/10.1063/1.1704351
M. Visser, “The Kerr spacetime: A brief introduction”, [arXiv:0706.0622 [gr-qc]]. Published in [5]
Wiltshire, D.L., Visser, M., Scott, S.M. (eds.): The Kerr spacetime: Rotating black holes in general relativity. Cambridge University Press, Cambridge (2009)
O’Neill, Barrett: The Geometry of Kerr Black Holes, (Peters, Wellesley, 1995). Reprinted (Dover, Mineloa, 2014)
Misner, Charles, Thorne, Kip, Wheeler, John Archibald: Gravitation. Freeman, San Francisco (1973)
Wald, Robert: General relativity. University of Chicago Press, Chicago (1984)
Weinberg, Steven: Gravitation and Cosmology: Principles and Applications of the General Theory of Relativity. Wiley, Hoboken (1972)
Adler, Ronald J., Bazin, Maurice, Schiffer, Menahem: Introduction to General Relativity, Second edition, (McGraw–Hill, New York, 1975). [It is important to acquire the 1975 second edition, the 1965 first edition does not contain any discussion of the Kerr spacetime.]
Hobson, M.P., Estathiou, G.P., Lasenby, A.N.: General relativity: An introduction for physicists. Cambridge University Press, Cambridge (2006)
D’Inverno, Ray: Introducing Einstein’s Relativity. Oxford University Press, New York (1992)
Hartle, James: Gravity: An introduction to Einstein’s general relativity. Addison Wesley, San Francisco (2003)
Carroll, Sean: An introduction to general relativity: Spacetime and Geometry. Addison Wesley, San Francisco (2004)
Berti, E., Barausse, E., Cardoso, V., Gualtieri, L., Pani, P., Sperhake, U., Stein, L.C., Wex, N., Yagi, K., Baker, T., et al.: Testing General Relativity with Present and Future Astrophysical Observations. Class. Quant. Grav. 32, 243001 (2015). https://doi.org/10.1088/0264-9381/32/24/243001. [arXiv:1501.07274 [gr-qc]]
Yunes, N., Yagi, K., Pretorius, F.: Theoretical Physics Implications of the Binary Black-Hole Mergers GW150914 and GW151226. Phys. Rev. D 94(8), 084002 (2016). https://doi.org/10.1103/PhysRevD.94.084002. [arXiv:1603.08955 [gr-qc]]
Cardoso, V., Pani, P.: Testing the nature of dark compact objects: a status report. Living Rev. Rel. 22(1), 4 (2019). https://doi.org/10.1007/s41114-019-0020-4. [arXiv:1904.05363 [gr-qc]]
Barack, L., Cutler, C.: Using LISA EMRI sources to test off-Kerr deviations in the geometry of massive black holes. Phys. Rev. D 75, 042003 (2007). https://doi.org/10.1103/PhysRevD.75.042003. [arXiv:gr-qc/0612029 [gr-qc]]
Bambi, C., Freese, K., Vagnozzi, S., Visinelli, L.: Testing the rotational nature of the supermassive object M87* from the circularity and size of its first image. Phys. Rev. D 100(4), 044057 (2019). https://doi.org/10.1103/PhysRevD.100.044057. [arXiv:1904.12983 [gr-qc]]
Barack, L., Pound, A.: Self-force and radiation reaction in general relativity. Rept. Prog. Phys. 82(1), 016904 (2019). https://doi.org/10.1088/1361-6633/aae552. [arXiv:1805.10385 [gr-qc]]
Barausse, E., Berti, E., Hertog, T., Hughes, S.A., Jetzer, P., Pani, P., Sotiriou, T.P., Tamanini, N., Witek, H., Yagi, K., et al.: Prospects for Fundamental Physics with LISA. Gen. Relativ. Gravit. 52(8), 81 (2020). https://doi.org/10.1007/s10714-020-02691-1. [arXiv:2001.09793 [gr-qc]]
Birkhoff, Garret: Relativity and Modern Physics. Harvard University Press, Cambridge (1923)
Jebsen, Jörg Tofte: “Über die allgemeinen kugelsymmetrischen Lösungen der Einsteinschen Gravitationsgleichungen im Vakuum”, Ark. Mat. Ast. Fys. (Stockholm) 15, nr.18 (1921)
Deser, Stanley, Franklin, Joel: Schwarzschild and Birkhoff a la Weyl. Am. J. Phys. 73, 261 (2005). https://doi.org/10.1119/1.1830505. [arXiv:gr-qc/0408067 [gr-qc]]
Johansen, Nils Voje, Ravndal, Finn: On the discovery of Birkhoff’s theorem. Gen. Relativ. Gravit. 38, 537–540 (2006). https://doi.org/10.1007/s10714-006-0242-0. [arXiv:physics/0508163 [physics.hist-ph]]
Skakala, J., Visser, M.: “Birkhoff-like theorem for rotating stars in (2+1) dimensions”, [arXiv:0903.2128 [gr-qc]]
Edery, A., Godin, J.: Second order Kerr deflection. Gen. Relativ. Gravit. 38, 1715–1722 (2006). https://doi.org/10.1007/s10714-006-0347-5
Hod, S.: The fastest way to circle a black hole. Phys. Rev. D 84, 104024 (2011). https://doi.org/10.1103/PhysRevD.84.104024. [arXiv:1201.0068 [gr-qc]]
Warburton, N., Barack, L., Sago, N.: Isofrequency pairing of geodesic orbits in Kerr geometry. Phys. Rev. D 87(8), 084012 (2013). https://doi.org/10.1103/PhysRevD.87.084012. [arXiv:1301.3918 [gr-qc]]
Hod, S.: Spherical null geodesics of rotating Kerr black holes. Phys. Lett. B 718, 1552–1556 (2013). https://doi.org/10.1016/j.physletb.2012.12.047. [arXiv:1210.2486 [gr-qc]]
Teo, E.: Spherical orbits around a Kerr black hole. Gen. Relativ. Gravit. 53(1), 10 (2021). https://doi.org/10.1007/s10714-020-02782-z. [arXiv:2007.04022 [gr-qc]]
Tavlayan, A., Tekin, B.: Exact Formulas for Spherical Photon Orbits Around Kerr Black Holes. Phys. Rev. D 102(10), 104036 (2020). https://doi.org/10.1103/PhysRevD.102.104036. [arXiv:2009.07012 [gr-qc]]
Broderick, A.E., Johannsen, T., Loeb, A., Psaltis, D.: Testing the No-Hair Theorem with Event Horizon Telescope Observations of Sagittarius A*. Astrophys. J. 784, 7 (2014). https://doi.org/10.1088/0004-637X/784/1/7. [arXiv:1311.5564 [astro-ph.HE]]
T. Johannsen, “Sgr A* and General Relativity”, Class. Quant. Grav. 33 (2016) no.11, 113001 https://doi.org/10.1088/0264-9381/33/11/113001 [arXiv:1512.03818 [astro-ph.GA]]
Broderick, A., Loeb, A.: Imaging the Black Hole Silhouette of M87: Implications for Jet Formation and Black Hole Spin. Astrophys. J. 697, 1164–1179 (2009). https://doi.org/10.1088/0004-637X/697/2/1164. [arXiv:0812.0366 [astro-ph]]
S. E. Gralla, D. E. Holz and R. M. Wald, “Black Hole Shadows, Photon Rings, and Lensing Rings”, Phys. Rev. D 100 (2019) no.2, 024018 https://doi.org/10.1103/PhysRevD.100.024018 [arXiv:1906.00873 [astro-ph.HE]]
Glampedakis, K., Pappas, G.: Modification of photon trapping orbits as a diagnostic of non-Kerr spacetimes. Phys. Rev. D 99(12), 124041 (2019). https://doi.org/10.1103/PhysRevD.99.124041. [arXiv:1806.09333 [gr-qc]]
Perlick, V., Tsupko, O.Y.: Calculating black hole shadows: Review of analytical studies. Phys. Rept. 947, 1–39 (2022). https://doi.org/10.1016/j.physrep.2021.10.004. [arXiv:2105.07101 [gr-qc]]
Bambi, C.: Astrophysical Black Holes: A Compact Pedagogical Review. Annalen Phys. 530, 1700430 (2018). https://doi.org/10.1002/andp.201700430. [arXiv:1711.10256 [gr-qc]]
Vincent, F.H., Wielgus, M., Abramowicz, M.A., Gourgoulhon, E., Lasota, J.P., Paumard, T., Perrin, G.: Geometric modeling of M87* as a Kerr black hole or a non-Kerr compact object. Astron. Astrophys. 646, A37 (2021). https://doi.org/10.1051/0004-6361/202037787. [arXiv:2002.09226 [gr-qc]]
Chael, A., Johnson, M.D., Lupsasca, A.: Observing the Inner Shadow of a Black Hole: A Direct View of the Event Horizon. Astrophys. J. 918(1), 6 (2021). https://doi.org/10.3847/1538-4357/ac09ee. [arXiv:2106.00683 [astro-ph.HE]]
Berry, T., Simpson, A., Visser, M.: Photon spheres, ISCOs, and OSCOs: Astrophysical observables for regular black holes with asymptotically Minkowski cores. Universe 7(1), 2 (2020). https://doi.org/10.3390/universe7010002. [arXiv:2008.13308 [gr-qc]]
Boonserm, P., Ngampitipan, T., Simpson, A., Visser, M.: Innermost and outermost stable circular orbits in the presence of a positive cosmological constant. Phys. Rev. D 101(2), 024050 (2020). https://doi.org/10.1103/PhysRevD.101.024050. [arXiv:1909.06755 [gr-qc]]
Thirring, Hans, Lense, Josef: “Über den Einfluss der Eigenrotation der Zentralkörperauf die Bewegung der Planeten und Monde nach der Einsteinschen Gravitationstheorie”, Physikalische Zeitschrift, Leipzig Jg. 19(8), p. 156–163 (1918). English translation by Bahram Mashoon, Friedrich W. Hehl, and Dietmar S. Theiss: “On the influence of the proper rotations of central bodies on the motions of planets and moons in Einstein’s theory of gravity”, General Relativity and Gravitation 16, 727–741 (1984)
Pfister, Herbert: “On the history of the so-called Lense–Thirring effect”, http://philsci-archive.pitt.edu/archive/00002681/01/lense.pdf
Painlevé, Paul: La mécanique classique et la théorie de la relativité. C. R. Acad. Sci. (Paris) 173, 677–680 (1921)
Painlevé, Paul: La gravitation dans la mécanique de Newton et dans la mécanique d’Einstein. C. R. Acad. Sci. (Paris) 173, 873–886 (1921)
Gullstrand, Allvar: Allgemeine Lösung des statischen Einkörperproblems in der Einsteinschen Gravitationstheorie. Arkiv för Matematik, Astronomi och Fysik. 16(8), 1–15 (1922)
Martel, K., Poisson, E.: Regular coordinate systems for Schwarzschild and other spherical space-times. Am. J. Phys. 69, 476–480 (2001). https://doi.org/10.1119/1.1336836. [arXiv:gr-qc/0001069 [gr-qc]]
Faraoni, V., Vachon, G.: When Painlevé-Gullstrand coordinates fail. Eur. Phys. J. C 80(8), 771 (2020). https://doi.org/10.1140/epjc/s10052-020-8345-4. [arXiv:2006.10827 [gr-qc]]
Boonserm, P., Ngampitipan, T., Visser, M.: Near-horizon geodesics for astrophysical and idealised black holes: Coordinate velocity and coordinate acceleration. Universe 4(6), 68 (2018). https://doi.org/10.3390/universe4060068. [arXiv:1710.06139 [gr-qc]]
Baines, Joshua, Berry, Thomas, Simpson, Alex, Visser, Matt: Painleve-Gullstrand form of the Lense-Thirring spacetime. Universe 7#4, 105 (2021). https://doi.org/10.3390/universe704010. [arXiv:2006.14258 [gr-qc]]
Baines, Joshua, Berry, Thomas, Simpson, Alex, Visser, Matt: Killing tensor and Carter constant for Painlevé-Gullstrand form of Lense-Thirring spacetime. Universe 7#12, 473 (2021). https://doi.org/10.3390/universe7120473. [arXiv:2110.01814 [gr-qc]]
Baines, Joshua, Berry, Thomas, Simpson, Alex, Visser, Matt: Geodesics for Painlevé-Gullstrand form of Lense-Thirring spacetime. Universe 8#2, 115 (2022). https://doi.org/10.3390/universe8020115. [arXiv:2112.05228 [gr-qc]]
Hamilton, A.J., Lisle, J.P.: The river model of black holes. Am. J. Phys. 76, 519–532 (2008). https://doi.org/10.1119/1.2830526. [arXiv:gr-qc/0411060 [gr-qc]]
Baines, J., Berry, T., Simpson, A., Visser, M.: Unit-lapse versions of the Kerr spacetime. Class. Quant. Grav. 38(5), 055001 (2021). https://doi.org/10.1088/1361-6382/abd071. [arXiv:2008.03817 [gr-qc]]
Valiente Kroon, J.A.: On the nonexistence of conformally flat slices in the Kerr and other stationary space-times. Phys. Rev. Lett. 92, 041101 (2004). https://doi.org/10.1103/PhysRevLett.92.041101. [arXiv:gr-qc/0310048 [gr-qc]]
Valiente Kroon, J.A.: Asymptotic expansions of the Cotton-York tensor on slices of stationary space-times. Class. Quant. Grav. 21, 3237–3250 (2004). https://doi.org/10.1088/0264-9381/21/13/009. [arXiv:gr-qc/0402033 [gr-qc]]
Jaramillo, J.L., Valiente Kroon, J.A., Gourgoulhon, E.: From geometry to numerics: Interdisciplinary aspects in mathematical and numerical relativity. Class. Quant. Grav. 25, 093001 (2008). https://doi.org/10.1088/0264-9381/25/9/093001. [arXiv:0712.2332 [gr-qc]]
Baines, Joshua, Berry, Thomas, Simpson, Alex, Visser, Matt: Darboux diagonalization of the spatial 3-metric in Kerr spacetime. Gen. Relativ. Gravit. 53, 1, 3 (2021). https://doi.org/10.1007/s10714-020-02765-0. [arXiv:2009.01397 [gr-qc]]
Papadopoulos, G.O., Kokkotas, K.D.: On Kerr black hole deformations admitting a Carter constant and an invariant criterion for the separability of the wave equation. Gen. Relativ. Gravit. 53(2), 21 (2021). https://doi.org/10.1007/s10714-021-02795-2. [arXiv:2007.12125 [gr-qc]]
Papadopoulos, G.O., Kokkotas, K.D.: Preserving Kerr symmetries in deformed spacetimes. Class. Quant. Grav. 35(18), 185014 (2018). https://doi.org/10.1088/1361-6382/aad7f4. [arXiv:1807.08594 [gr-qc]]
Benenti, S., Francaviglia, M.: Remarks on Certain Separability Structures and Their Applications to General Relativity. Gen. Relativ. Gravit. 10, 79–92 (1979)
Carballo-Rubio, R., Di Filippo, F., Liberati, S., Visser, M.: Phenomenological aspects of black holes beyond general relativity. Phys. Rev. D 98(12), 124009 (2018). https://doi.org/10.1103/PhysRevD.98.124009. [arXiv:1809.08238 [gr-qc]]
Carballo-Rubio, R., Di Filippo, F., Liberati, S., Visser, M.: Geodesically complete black holes. Phys. Rev. D 101, 084047 (2020). https://doi.org/10.1103/PhysRevD.101.084047. [arXiv:1911.11200 [gr-qc]]
Carballo-Rubio, R., Di Filippo, F., Liberati, S., Visser, M.: “Geodesically complete black holes in Lorentz-violating gravity”, JHEP 2022 (in press). [arXiv:2111.03113 [gr-qc]]
Carballo-Rubio, R., Di Filippo, F., Liberati, S., Visser, M.: Opening the Pandora’s box at the core of black holes. Class. Quant. Grav. 37(14), 14 (2020). https://doi.org/10.1088/1361-6382/ab8141. [arXiv:1908.03261 [gr-qc]]
Simpson, A., Visser, M.: “The eye of the storm: A regular Kerr black hole”, JCAP (in press), [arXiv:2111.12329 [gr-qc]]
Simpson, A., Visser, M.: “Astrophysically viable Kerr-like spacetime – into the eye of the storm”, [arXiv:2112.04647 [gr-qc]]
Visser, M., Barceló, C., Liberati, S., Sonego, S.: “Small, dark, and heavy: But is it a black hole?’’. PoS BHGRS, 010 (2008). https://doi.org/10.22323/1.075.0010. [arXiv:0902.0346 [gr-qc]]
Visser, M.: “Black holes in general relativity’’. PoS BHGRS, 001 (2008). https://doi.org/10.22323/1.075.0001. [arXiv:0901.4365 [gr-qc]]
Mazza, J., Franzin, E., Liberati, S.: A novel family of rotating black hole mimickers. JCAP 04, 082 (2021). https://doi.org/10.1088/1475-7516/2021/04/082. [arXiv:2102.01105 [gr-qc]]
Franzin, E., Liberati, S., Mazza, J., Simpson, A., Visser, M.: Charged black-bounce spacetimes. JCAP 07, 036 (2021). https://doi.org/10.1088/1475-7516/2021/07/036. [arXiv:2104.11376 [gr-qc]]
De Lorenzo, T., Pacilio, C., Rovelli, C., Speziale, S.: On the Effective Metric of a Planck Star. Gen. Relativ. Gravit. 47(4), 41 (2015). https://doi.org/10.1007/s10714-015-1882-8. [arXiv:1412.6015 [gr-qc]]
Hayward, S.A.: Formation and evaporation of regular black holes. Phys. Rev. Lett. 96, 031103 (2006). https://doi.org/10.1103/PhysRevLett.96.031103. [arXiv:gr-qc/0506126 [gr-qc]]
Bronnikov, K.A.: Regular magnetic black holes and monopoles from nonlinear electrodynamics. Phys. Rev. D 63, 044005 (2001). https://doi.org/10.1103/PhysRevD.63.044005. [arXiv:gr-qc/0006014 [gr-qc]]
Bronnikov, K.A., Fabris, J.C.: Regular phantom black holes. Phys. Rev. Lett. 96, 251101 (2006). https://doi.org/10.1103/PhysRevLett.96.251101. [arXiv:gr-qc/0511109 [gr-qc]]
Johannsen, T., Psaltis, D.: A Metric for Rapidly Spinning Black Holes Suitable for Strong-Field Tests of the No-Hair Theorem. Phys. Rev. D 83, 124015 (2011). https://doi.org/10.1103/PhysRevD.83.124015. [arXiv:1105.3191 [gr-qc]]
Bardeen, J.M.: “Non-singular general relativistic gravitational collapse”, Abstracts of the 5th international conference on gravitation and the theory of relativity (GR5), eds. V. A. Fock et al. (Tbilisi University Press, Tblisi, Georgia, former USSR, 1968), pages 174–175
Acknowledgements
JB was supported by a MSc scholarship funded by the Marsden Fund, via a grant administered by the Royal Society of New Zealand. TB was supported by a Victoria University of Wellington MSc scholarship, and was also indirectly supported by the Marsden Fund, via a grant administered by the Royal Society of New Zealand. AS was supported by a Victoria University of Wellington PhD Doctoral Scholarship, and was also indirectly supported by the Marsden fund, via a grant administered by the Royal Society of New Zealand. MV was directly supported by the Marsden Fund, via a grant administered by the Royal Society of New Zealand.
Funding
Open Access funding enabled and organized by CAUL and its Member Institutions
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Baines, J., Berry, T., Simpson, A. et al. Constant-r geodesics in the Painlevé–Gullstrand form of Lense–Thirring spacetime. Gen Relativ Gravit 54, 79 (2022). https://doi.org/10.1007/s10714-022-02963-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10714-022-02963-y