
Abstract
With small size, high flexibility, low cost, and deployment convenience, Micro-sized autonomous underwater vehicle (Micro-AUV) is capable of performing diverse underwater missions efficiently in confined underwater space, for the extensive purpose of rescue, sightseeing, pipeline engineering and so on. The underwater acoustic (UWA) communication technique provides an effective way to support this types of underwater mission for telemetry and remote control of Micro-AUV. However, while the adverse multipath caused by confined space poses significant challenge to the classic coherent acoustic communication schemes that need channel estimation and equalization processing, the employment of non-coherent communication scheme is generally limited by low data rate. By utilizing time-domain and frequency-domain differential modulation to suppress the influence of multipath, a low-complexity UWA communication payload is designed to provide an effective solution to make a tradeoff between data rate and implementation complexity. Based on a STM32 series processor, this paper introduced the software and hardware implementation of a time-frequency differential OFDM UWA communication payload for Micro-AUV and presented the performance evaluation of the system in confined underwater space. The experimental results achieved in a confined lake show that the proposed system has the potential of being used for Micro-AUV to achieve a data rate of 1.96 kbps at a distance of 200m with acceptable implementation overhead.
Similar content being viewed by others


1 Introduction
With the rapid development of science and technology, autonomous underwater vehicle (AUV) is widely used in marine resources investigation, data collection, seabed terrain detection, underwater communication network relay and other fields [1,2,3]. However, underwater rescue, sightseeing, science education and similar cost-sensitive missions, that generally happen in confined space such as pool, pipeline, cave, small lake or river [4, 5], pose significant challenges to the large size, expense and complicated AUVs, which are designed for cost-insensitive missions such as those in science or military fields. On the other hand, Micro-sized autonomous underwater vehicle (Micro-AUV) provides an efficient and low-cost way for underwater tasks in confined water area [6, 7]. Thus, with small size, high flexibility, and low cost characteristics, Micro-AUV is drawing more and more attention from diverse fields [8,9,10].
At present, due to relatively easy availability of commercial products, some Micro-AUVs adopt optical or radio communication units for communication at water surface. However, as limited by physical constraints, the underwater capability of these type Micro-AUVs is limited [11, 12]. As an effective way of underwater transmission, underwater acoustic (UWA) communication can meet the communication requirements of Micro-AUV. Different from the general UWA communication system, due to the strict restrictions of the size, load and cost of Micro-AUV, higher demands and challenges are put forward for the design, implementation, and engineering integration of the supporting UWA communication system.
For incoherent communication, the utilization ratio of the frequency band is low. In the limited bandwidth UWA channel, incoherent technology is difficult to achieve the function of high-speed communication [13, 14]. Different from incoherent reception, coherent communication can greatly improve the data transmission rate of UWA communication and effectively reduce the influence of inter symbol interference (ISI). However, due to the complex time-space-frequency characteristics of UWA channel, the phase of UWA signal changes rapidly, which presents a serious impact on the performance of communication [15,16,17].
For autonomous underwater platform, high-speed robust underwater communication is essential. If the algorithm complexity of UWA communication is high, it will put forward more requirements on hardware and storage performance for Micro-AUV platform, which leads to expensive system cost and is not suitable for Micro-AUV applications. In addition, the system needs to ensure the real-time communication. These are the main challenges of the UWA communication system for Micro-AUV [8, 10, 18].
Orthogonal frequency division multiplexing (OFDM) system has the characteristics of great anti multipath performance and high spectrum efficiency. It has become a research hotspot of high-speed UWA communication. For UWA channel, OFDM signal can effectively combat ISI caused by UWA channel, especially for UWA channel with multipath delay and signal fading. OFDM technology can ensure high-speed data transmission. Besides, the frequency spectrum of subcarrier is superimposed orthogonally, thus OFDM has the high-frequency utilization efficiency. Moreover, underwater acoustic channel is frequency selective. In OFDM system, dynamic modulation can be used to avoid the influence of deep fading subchannel and improve the communication performance [19,20,21].
In the UWA channel, multipath interference and Doppler frequency shift often exist at the same time. Considering the advantages and disadvantages of time-domain and frequency-domain differential, [22, 23] proposed a modulation scheme with time-frequency two-dimensional differential. In this paper, the differential quadrature phase shift keying (DQPSK) modulation is carried out in time-domain firstly, and the differential coding is performed in the frequency-domain, which actually does not carry digital information. The time-frequency differential OFDM can modulate and demodulate by double differential in time-domain and frequency-domain, without carrier recovery, with strong anti-interference ability and good channel adaptability.
With the purpose to be used for Micro-AUV, in this paper, R &D of a time-frequency differential OFDM modulation payload is briefly introduced, which features simple structure, low computing complexity, and easy implementation with Micro-AUV. Meanwhile, the performance of which is evaluated in a small lake to verify its effectiveness, so as to provide an acceptably high data rate at the expense of acceptable implementation overhead.
2 Methods
2.1 Algorithm
The time-frequency differential OFDM scheme [21–25] is adopted for the proposed payload. The adjacent OFDM symbols are used for time-domain differential modulation, and then, the adjacent subcarriers are used to carry inverse data as pilots for frequency-domain differential modulation. As an established technology, the model of it is briefly introduced here.
For the n-th subcarrier of the i-th OFDM symbol, let the data symbol be
before differential modulation, where \(n=0,2,\ldots ,2(N-1)\), \(\varphi _{i,n}\in \{0,2\pi \}\) is the phase of the n-th subcarrier of the i-th OFDM symbol. The data after time-domain differential modulation can be written as
Hence, we have
Then, the frequency-domain differential modulation is performed, and the corresponding \((n+1)\)-th subcarrier is the pilot data as follows,
Therefore,
At the receiving end, the phase information \(\hat{\varphi }_{i,n}\) of the received data signal is extracted and subtracted from the phase information \(\hat{\varphi }_{i-1,n}\) of the previous symbol. The results of differential demodulation are shown as follows,
The differential demodulation of pilot signal is opposite to that of data signal, hence
The data signals are corrected by the pilot signals; thus, we have
By adopting time-frequency differential OFDM scheme to eliminate the influence of multipath and Doppler frequency shift in UWA channel, there is no need for channel estimation and equalization, thus facilitating low computational complexity implementation for small platforms such as Micro-AUV.
2.2 System design
The illustration of the time-domain differential OFDM system model is shown in Fig. 1. For the transmitter, firstly, convolutional coding and interleaving coding are used for binary information [26,27,28,29]. Secondly, the coded data are converted into several parallel low bit data streams through serial to parallel conversion. DQPSK is adopted for time-frequency two-dimensional differential coding, so as to complete the mapping process from binary bit information to frequency-domain signal. Thirdly, the mapped sequence is loaded into the corresponding frequency band of OFDM symbol, and then, IFFT operation is performed to realize the conversion from frequency-domain signal to time-domain signal. In order to resist the inter symbol interference and inter subcarrier interference caused by channel multipath, the cyclic prefix (CP) is added to each OFDM frame modulation signal. Finally, in front of the modulation signal, linear frequency modulation (LFM) signal is added to facilitate the detection of synchronization head at the receiver. The modulation signal is transmitted to the UWA channel after digital to analog conversion and power amplification. At the receiving end, the OFDM signal is demodulated after the signal is detected synchronously. The process of OFDM signal demodulation is opposite to that of modulation. Note that to facilitate low complexity implementation, the channel estimation and equalization techniques are not adopted in the proposed payload.

Block chart of the time-domain differential OFDM payload
In this paper, we designed an OFDM system for Micro-AUV in confined space based on STM32F407 processor. The hardware architecture of OFDM system consists of upper computer, processor, and signal processing circuit, as presented in Fig. 2. Specifically the 32-bit ARM Cortex-M4 core in the STM32F407 processor is dedicated to controlling timers for data acquisition and processing [30]. Meanwhile, as shown in Fig. 3 is the integration of the proposed UWA payload with Georgia-Tech miniature underwater robot (GT-MUR) [8]. In modulation and demodulation, the core program of the proposed payload mostly contains three parts: serial interface module, transmitter module, and receiver module. As the communication between STM32F407 processor and upper computer, the serial communication module can receive the command from the upper computer and upload the status of payload to the upper computer.

Picture of the OFDM UWA communication payload

Integration of the proposed UWA communication payload with GT-MUR

The experiment scenario

The experimental UWA CIR
3 Experiment
In order to verify the performance of the proposed payload in confined underwater space, an experiment was carried out in Georgia Lake Acworth, USA, on October 27, 2019. Lake Acworth is a 260-acre artificial lake southwest of the city of Acworth, Georgia. The experiment scenario is shown in Fig. 4. The water depth of the experiment area is about 3 m, the distance between the transmitting and receiving is 200 m, and the water depth of the transducer is 1 m. The transmitter has a maximum output power of 50 W, corresponding to an approximate source level of 175 dB re 1 μPa at 1 m. The channel impulse response (CIR) of lake trial is shown in Fig. 5. It can be seen from Fig. 5 that the experiment channel contains typical multipath structure caused by the adverse shallow water environment in confined space.
The packet structure of the transmission signal contains synchronization signal, guard time, and differential OFDM symbols as shown in Fig. 6. The specific parameters of OFDM signal are given in Table 1. In addition, the channel coding adopts (2,1,7) convolutional coding with an interleaving depth of 7, which is adopted to further guarantee the communication performance.

OFDM Signal frame format
4 Results and discussion
4.1 Results
The waveform of the received signal is provided in Fig. 7.
Figure 8 shows the bit error ratio (BER) output over sequence number of OFDM data frame.
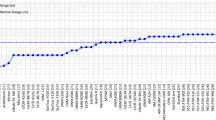
The percentage of total OFDM packets with different level of BER is shown in Fig. 9.

Received signal of the lake trial

The BER output over sequence number of OFDM data frame

Percentage of total frames with different level of BER
4.2 Discussion
In the experiment, totally 74 OFDM packets were received, the demodulation result of which was collected for performance analysis. The waveform of the received signal is provided in Fig. 7, which exhibits a relatively high signal-to-noise ratio (SNR) of roughly 24 dB due to the short communication distance in confined space. Figure 8 shows the BER output over sequence number of OFDM data frame, which corresponds to an average BER of 0.13%. Note that, to display zero BER at logarithmic scale, \(5\times 10^{-4}\) is used to represent zero BER in Fig. 8.
The percentage of total OFDM packets with different level of BER is shown in Fig. 9. By classifying the BER output into three types of level, i.e., \(10^{-2}\), \(10^{-3}\) and zero BER. The results as presented in Fig. 9 reveal that, while about 55% of the received packets corresponds to a BER of \(10^{-2}\) level, 10% of the received packets achieves zero BER level.
5 Conclusion
In this paper, based on STM32 processor, a low-complexity OFDM UWA communication payload is designed and evaluated for Micro-AUV in confined space. Adopting the time-frequency two-dimensional differential OFDM modulation to remove the need for channel estimation and equalization, the proposed system provides tolerance to multipath channel with low implemental complexity, thus facilitating its integration with Micro-AUV. The lake experiment results verified the effectiveness of the proposed system under multipath caused by confined space, with a data rate of 1.9 kbps at a distance of 200 m. By balancing the implement overhead and an acceptable communication performance, the proposed payload has the potential of being used for Micro-AUV in diverse low-cost underwater missions associated with confined space.
Abbreviations
- Micro-AUV:
-
Micro-sized autonomous underwater vehicle
- UWA:
-
Underwater acoustic
- ISI:
-
Inter symbol interference
- OFDM:
-
Orthogonal frequency division multiplexing
- CP:
-
Cyclic prefix
- LFM:
-
Linear frequency modulation
- GT-MUR:
-
Georgia-Tech miniature underwater robot
- CIR:
-
Channel impulse response
- BER:
-
Bit error ratio
- SNR:
-
Signal-to-noise ratio
References
P.J.B. Sánchez, M. Papaelias, F.P.G. Márquez, Autonomous underwater vehicles: instrumentation and measurements. IEEE Instrum. Meas. Mag. 23(2), 105–114 (2020)
C.R. Teeneti, T.T. Truscott, D.N. Beal, Z. Pantic, Review of wireless charging systems for autonomous underwater vehicles. IEEE J. Ocean. Eng. 46(1), 68–87 (2019)
D. Li, P. Wang, L. Du, Path planning technologies for autonomous underwater vehicles—a review. IEEE Access 7, 9745–9768 (2018)
J. González-García, A. Gómez-Espinosa, E. Cuan-Urquizo, L.G. García-Valdovinos, T. Salgado-Jiménez, J.A.E. Cabello, Autonomous underwater vehicles: localization, navigation, and communication for collaborative missions. Appl. Sci. 10(4), 1256 (2020)
H. Huang, Q. Tang, J. Li, W. Zhang, X. Bao, H. Zhu, G. Wang, A review on underwater autonomous environmental perception and target grasp, the challenge of robotic organism capture. Ocean Eng. 195, 106644 (2020)
J. Guo, J. Liu, M. Liu, T. Zhang, T. Yang, J.-H. Cui, Analysis of the factors affecting the communication between AUV and acoustic modem: from the perspective of experiments, in The 15th International Conference on Underwater Networks & Systems, pp. 1–5 (2021)
J. Yan, X. Yang, H. Zhao, X. Luo, X. Guan, Autonomous Underwater Vehicles: Localization, Tracking, and Formation (Springer, Singapore, 2021)
Q.-Y. Tao, Y.-H. Zhou, F. Tong, A.-J. Song, F. Zhang, Evaluating acoustic communication performance of micro autonomous underwater vehicles in confined spaces. Front. Inf. Technol. Electron. Eng. 19(8), 1013–1023 (2018)
Y. Yang, Y. Xiao, T. Li, A survey of autonomous underwater vehicle formation: performance, formation control, and communication capability. IEEE Commun. Surv. Tutor. 23(2), 815–841 (2021)
S. Zheng, F. Tong, B. Li, Q. Tao, A. Song, F. Zhang, Design and evaluation of an acoustic modem for a small autonomous unmanned vehicle. Sensors 19(13), 2923 (2019)
M.W. Doniec, Autonomous underwater data muling using wireless optical communication and agile AUV control. Ph.D. thesis, Massachusetts Institute of Technology (2013)
Y. Hao, Y. Gu, Y. Zhang, Fuzzy rule-based signal restoration for wireless optical communication of multi-autonomous underwater vehicles. Int. J Fuzzy Syst. (2020). https://doi.org/10.1007/s40815-020-00935-5
V. Lidström, E.S. Erstorp, M.L. Nordenvaad, P. Sigray, J. Kuttenkeuler, Non-coherent acoustic modulation for energy constrained underwater platforms, in OCEANS 2019-Marseille (IEEE, 2019) pp. 1–7
X.-L. Cao, W.-H. Jiang, F. Tong, Time reversal MFSK acoustic communication in underwater channel with large multipath spread. Ocean Eng. 152, 203–209 (2018)
M. Stojanovic, Recent advances in high-speed underwater acoustic communications. IEEE J. Ocean. Eng. 21(2), 125–136 (1996)
C. He, Q. Zhang, Z. Yan, Q. Li, L. Zhang, J. Chen, Q. Qi, Experimental demonstration of phase-coherent underwater acoustic communications using a compact array. Ocean Eng. 145, 207–214 (2017)
J. Li, Y.V. Zakharov, B. Henson, Multibranch autocorrelation method for doppler estimation in underwater acoustic channels. IEEE J. Ocean. Eng. 43(4), 1099–1113 (2017)
E.R. Marques, J. Pinto, S. Kragelund, P.S. Dias, L. Madureira, A. Sousa, M. Correia, H. Ferreira, R. Gonçalves, R. Martins, AUV control and communication using underwater acoustic networks, in OCEANS 2007-Europe (IEEE, 2007), pp. 1–6
G. Qiao, Z. Babar, L. Ma, S. Liu, J. Wu, MIMO-OFDM underwater acoustic communication systems—a review. Phys. Commun. 23, 56–64 (2017)
I. Kochańska, J.H. Schmidt, J. Marszal, Shallow water experiment of OFDM underwater acoustic communications. Arch. Acoust. 45(1), 11–18 (2020)
Y. Zhou, F. Tong, Research and development of a highly reconfigurable OFDM modem for shallow water acoustic communication. IEEE Access 7, 123569–123582 (2019)
E. Haas, S. Kaiser, Two-dimensional differential demodulation for OFDM. IEEE Trans. Commun. 51(4), 580–586 (2003)
E. Haas, S. Kaiser, Analysis of two-dimensional differential demodulation for OFDM, in Globecom’00-IEEE. Global Telecommunications Conference. Conference Record (Cat. No. 00CH37137), vol. 2 (IEEE, 2000), pp. 751–755
D. Chen, B. Li, F. Tong, Q. Tao, F. Zhang, R &D of a low-complexity OFDM modem for Micro-AUV, in Proceedings of the International Conference on Underwater Networks & Systems, pp. 1–5 (2019)
C. Wang, J. Yin, D. Huang, A. Zielinski, Experimental demonstration of differential OFDM underwater acoustic communication with acoustic vector sensor. Appl. Acoust. 91, 1–5 (2015)
A.G. Bessios, F.M. Caimi, Multipath compensation for underwater acoustic communication, in Proceedings of OCEANS’94, vol. 1 (IEEE, 1994), p. 317
F. Wu, F. Tong, Non-uniform norm constraint LMS algorithm for sparse system identification. IEEE Commun. Lett. 17(2), 385–388 (2013)
Y. Tao, P.-b. Zhu, X.-m. Xu, Dual-mode modulation based research of underwater acoustic modem, in 2010 6th International Conference on Wireless Communications Networking and Mobile Computing (WiCOM) (IEEE, 2010), pp. 1–3
D. Sun, X. Hong, H. Cui, L. Liu, Iterative multi-channel FH-MFSK reception in mobile shallow underwater acoustic channels. IET Commun. 14(5), 838–845 (2020)
S. Gao, F. Shang, C. Du, Design of multichannel and multihop low-power wide-area network for aircraft vibration monitoring. IEEE Trans. Instrum. Meas. 68(12), 4887–4895 (2019)
Acknowledgements
None.
Funding
This work was supported in part by the National Key Research and Development Program of China (No. 2018YFE0110000), National Natural Science Foundation of China (No. 11274259, 11574258), the Science and Technology Commission Foundation of Shanghai (No. 21DZ1205500).
Author information
Authors and Affiliations
Contributions
All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Jiang, W., Tao, Q., Yao, J. et al. R&D of a low-complexity OFDM acoustic communication payload for Micro-AUV in confined space. EURASIP J. Adv. Signal Process. 2022, 64 (2022). https://doi.org/10.1186/s13634-022-00898-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13634-022-00898-9