
Large Deformation Problem of Bimodular Functionally-Graded Thin Circular Plates Subjected to Transversely Uniformly-Distributed Load: Perturbation Solution without Small-Rotation-Angle Assumption


Abstract
:1. Introduction
2. Governing Equations and Boundary Conditions
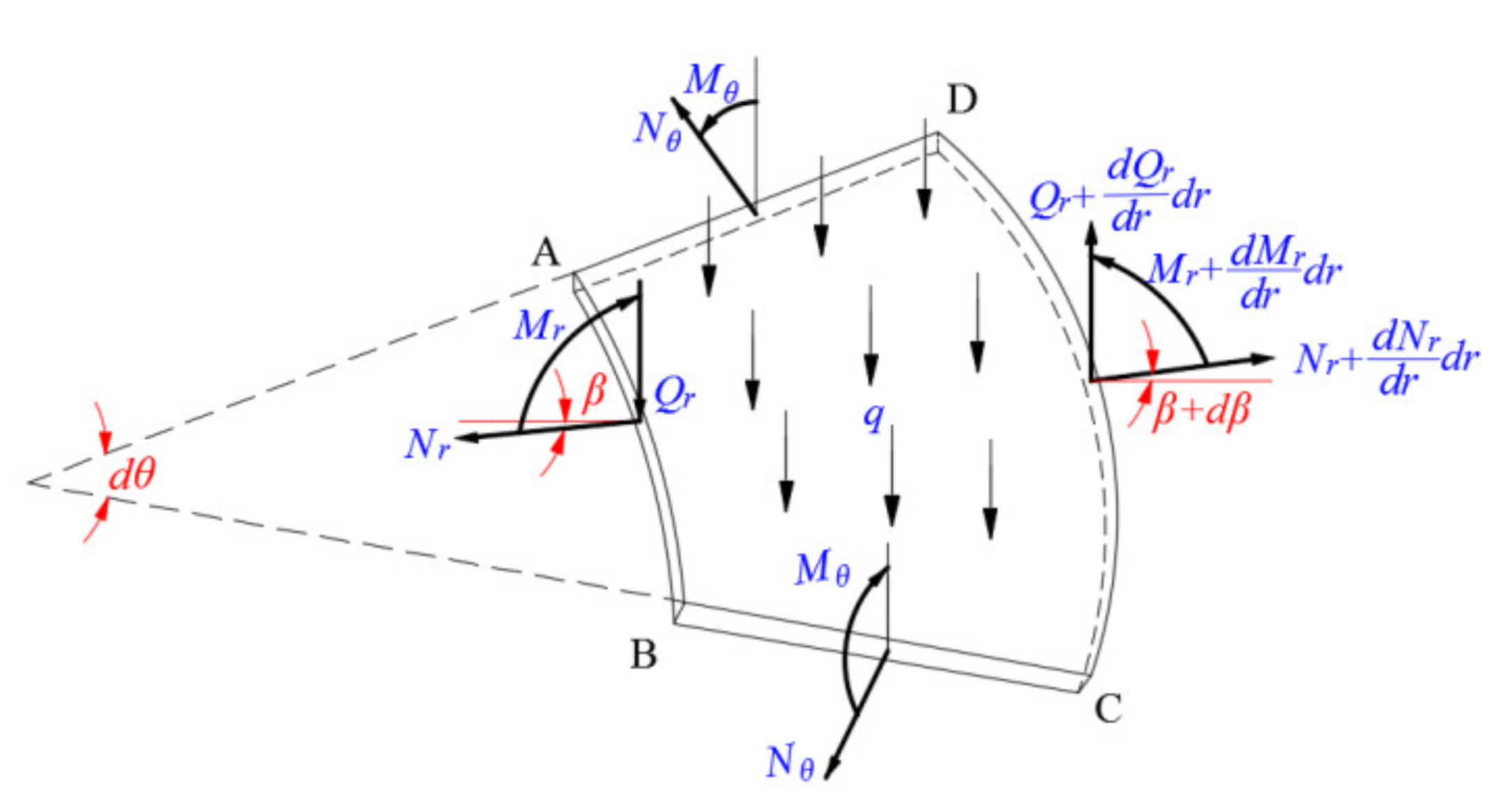
2.1. Establishment of Governing Equations
2.2. Verification of Regression and Simplification of Equations
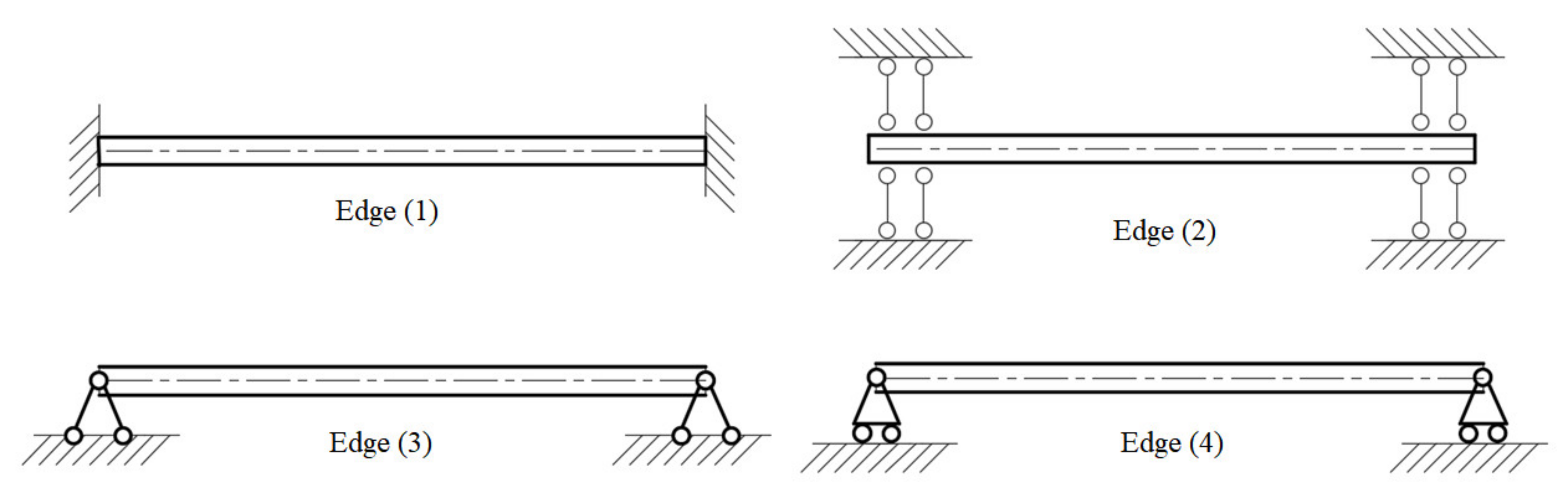
2.3. Boundary Conditions
3. Application of Perturbation Method
3.1. Perturbation Solution
- Step 1: p1, ω1(η) and s1(η)
- Step 2: p2, ω2(η) and s2(η)
- Step 3: p3, ω3(η) and s3(η)
- Step 4: p3, ω3(η) and s3(η)
3.2. Stress Analysis
4. Results and Discussions
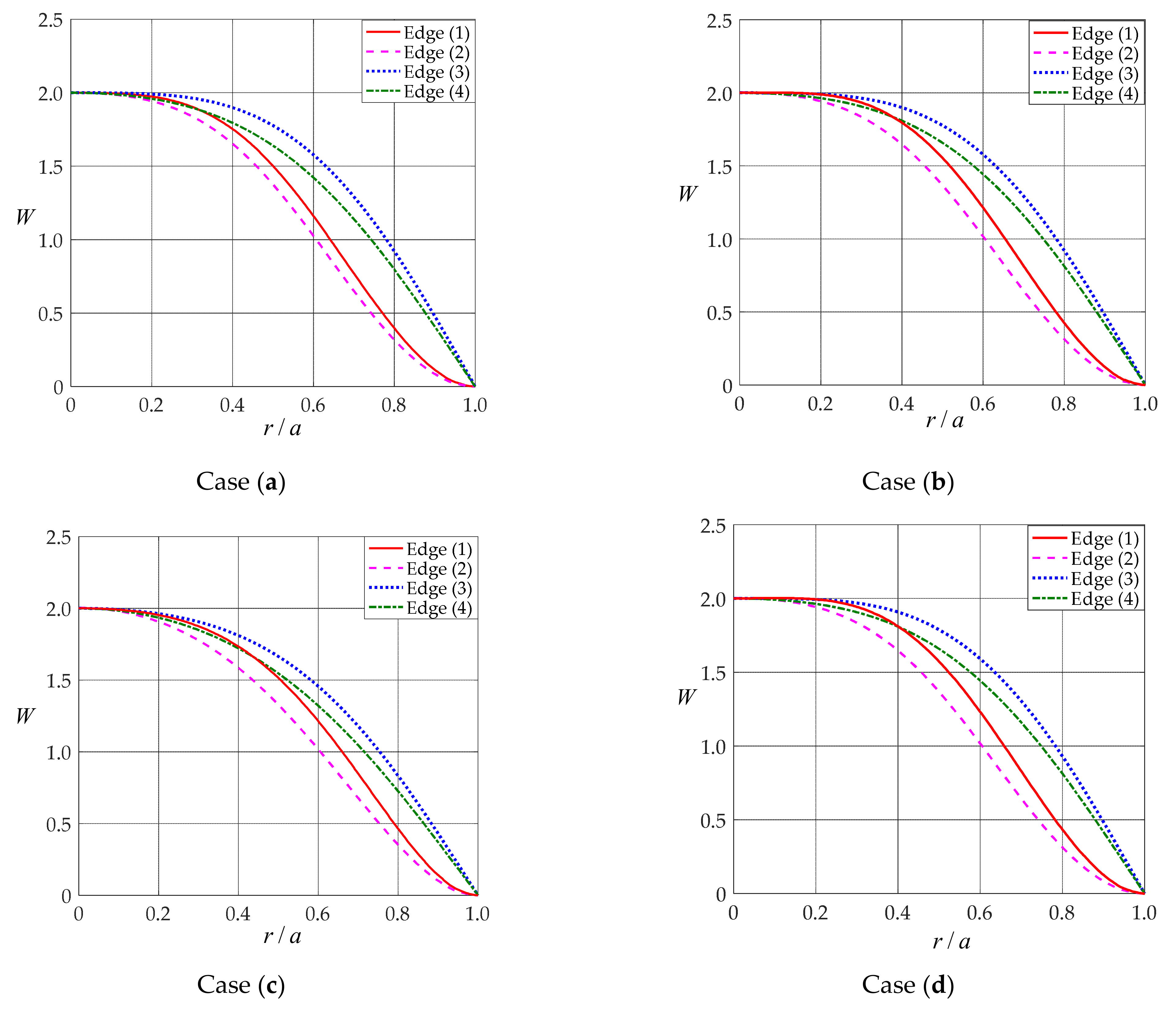
4.1. Determination of the Neutral Layer
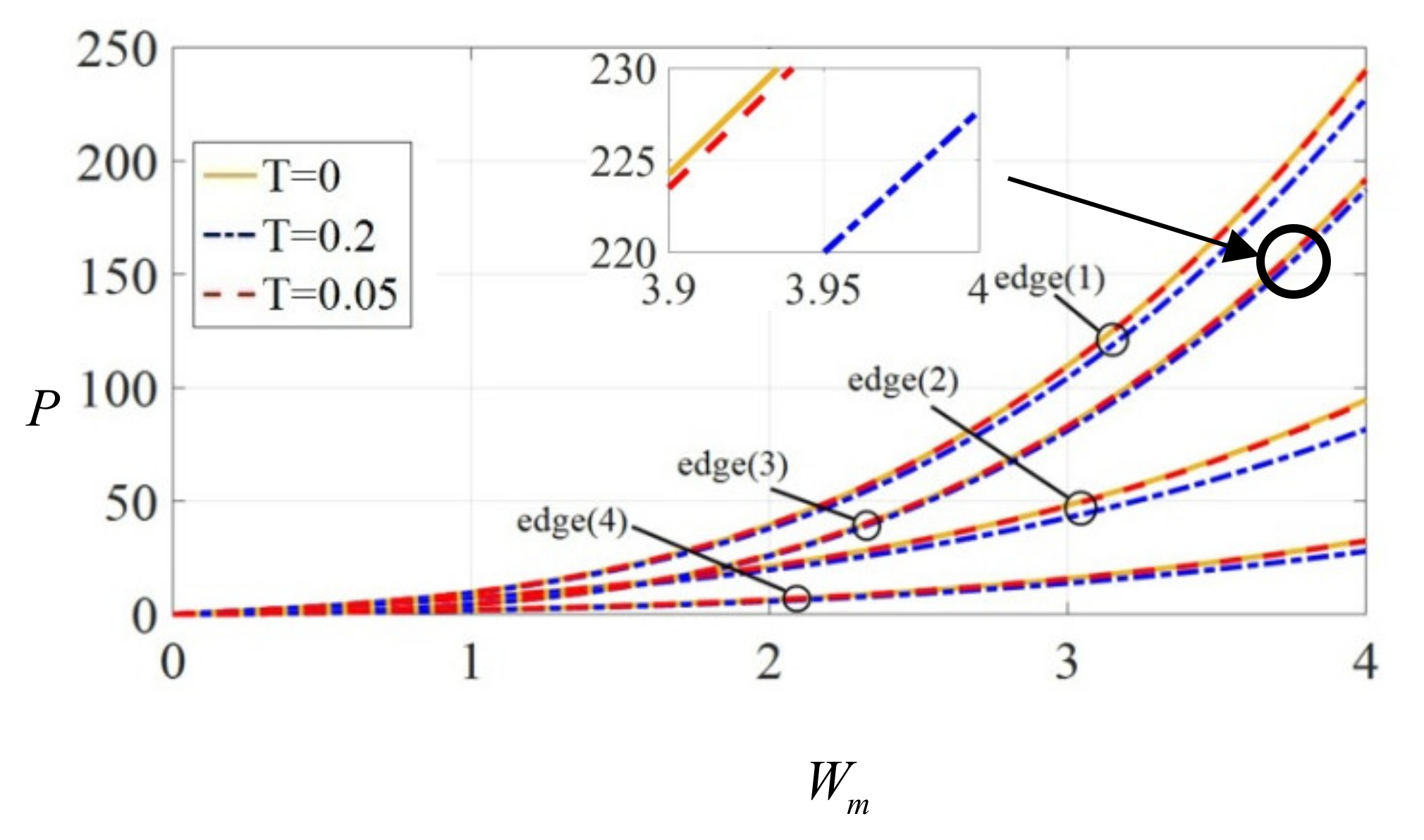
4.2. Effect of Small-Rotation-Angle Assumption on Loads vs. Central Deflection
4.3. Effect of Small-Rotation-Angle Assumption on Yield Stress
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Barak, M.M.; Currey, J.D.; Weiner, S.; Shahar, R. Are tensile and compressive Young’s moduli of compact bone different. J. Mech. Behav. Biomed. Mater. 2009, 2, 51–60. [Google Scholar] [CrossRef] [PubMed]
- Destrade, M.; Gilchrist, M.D.; Motherway, J.A.; Murphy, J.G. Bimodular rubber buckles early in bending. Mech. Mater. 2010, 42, 469–476. [Google Scholar] [CrossRef] [Green Version]
- Jones, R.M. Apparent flexural modulus and strength of multimodulus materials. J. Compos. Mater. 1976, 10, 342–354. [Google Scholar] [CrossRef]
- Jones, R.M. Stress-strain relations for materials with different moduli in tension and compression. AIAA J. 1977, 15, 16–23. [Google Scholar] [CrossRef]
- Bert, C.W. Models for fibrous composites with different properties in tension and compression. J. Eng. Mater. Technol. 1977, 99, 344–349. [Google Scholar] [CrossRef]
- Bruno, D.; Lato, S.; Sacco, E. Nonlinear analysis of bimodular composite plates under compression. Comput. Mech. 1994, 14, 28–37. [Google Scholar] [CrossRef]
- Tseng, Y.P.; Lee, C.T. Bending analysis of bimodular laminates using higher-order finite strip method. Compos. Struct. 1995, 30, 341–350. [Google Scholar] [CrossRef]
- Zinno, R.; Greco, F. Damage evolution in bimodular laminated composite under cyclic loading. Compos. Struct. 2001, 53, 381–402. [Google Scholar] [CrossRef]
- Ganapathi, M.; Patel, B.P.; Lele, A.V. Static analysis of bimodulus laminated composite plates subjected to mechanical loads using higher-order shear deformation theory. J. Reinf. Plast. Compos. 2004, 23, 1159–1171. [Google Scholar] [CrossRef]
- Khan, A.H.; Patel, B.P. Nonlinear periodic response of bimodular laminated composite annular sector plates. Compos. Part B Eng. 2019, 169, 96–108. [Google Scholar] [CrossRef]
- Ambartsumyan, S.A. Elasticity Theory of Different Modulus; Wu, R.F.; Zhang, Y.Z., Translators; China Railway Publishing House: Beijing, China, 1986. [Google Scholar]
- Yao, W.J.; Ye, Z.M. Analytical solution for bending beam subject to lateral force with different modulus. Appl. Math. Mech. Engl. Ed. 2004, 25, 1107–1117. [Google Scholar]
- He, X.T.; Chen, S.L.; Sun, J.Y. Applying the equivalent section method to solve beam subjected lateral force and bending-compression column with different moduli. Int. J. Mech. Sci. 2007, 49, 919–924. [Google Scholar] [CrossRef]
- Zhao, H.L.; Ye, Z.M. Analytic elasticity solution of bi-modulus beams under combined loads. Appl. Math. Mech. Engl. Ed. 2015, 36, 427–438. [Google Scholar] [CrossRef]
- He, X.T.; Hu, X.J.; Sun, J.Y.; Zheng, Z.L. An analytical solution of bending thin plates with different moduli in tension and compression. Struct. Eng. Mech. Int. J. 2010, 36, 363–380. [Google Scholar] [CrossRef]
- He, X.T.; Sun, J.Y.; Wang, Z.X.; Chen, Q.; Zheng, Z.L. General perturbation solution of large-deflection circular plate with different moduli in tension and compression under various edge conditions. Int. J. Non-Linear Mech. 2013, 55, 110–119. [Google Scholar] [CrossRef]
- Zhang, Y.Z.; Wang, Z.F. Finite element method of elasticity problem with different tension and compression moduli. Comput. Struct. Mech. Appl. 1989, 6, 236–245. [Google Scholar]
- Ye, Z.M.; Chen, T.; Yao, W.J. Progresses in elasticity theory with different moduli in tension and compression and related FEM. Chin. J. Mech. Eng. 2004, 26, 9–14. [Google Scholar]
- Sun, J.Y.; Zhu, H.Q.; Qin, S.H.; Yang, D.L.; He, X.T. A review on the research of mechanical problems with different moduli in tension and compression. J. Mech. Sci. Technol. 2010, 24, 1845–1854. [Google Scholar] [CrossRef]
- Gao, J.L.; Yao, W.J.; Liu, J.K. Temperature stress analysis for bi-modulus beam placed on Winkler foundation. Appl. Math. Mech. Engl. Ed. 2017, 38, 921–934. [Google Scholar] [CrossRef]
- Ma, J.W.; Fang, T.C.; Yao, W.J. Nonlinear large deflection buckling analysis of compression rod with different moduli. Mech. Adv. Mater. Struct. 2019, 26, 539–551. [Google Scholar] [CrossRef]
- Du, Z.L.; Zhang, Y.P.; Zhang, W.S.; Guo, X. A new computational framework for materials with different mechanical responses in tension and compression and its applications. Int. J. Solids Struct. 2016, 100–101, 54–73. [Google Scholar] [CrossRef]
- Kumar, S.; Reddy, K.M.; Kumar, A.; Devi, G.R. Development and characterization of polymer–ceramic continuous fiber reinforced functionally graded composites for aerospace application. Aerosp. Sci. Technol. 2013, 26, 185–191. [Google Scholar] [CrossRef]
- Maalej, M.; Ahmed, S.F.U.; Paramasivam, P. Corrosion durability and structural response of functionally-graded concrete beams. J. Adv. Concr. Technol. 2003, 1, 307–316. [Google Scholar] [CrossRef] [Green Version]
- Rabbani, V.; Hodaei, M.; Deng, X.; Lu, H.; Hui, D.; Wu, N. Sound transmission through a thick-walled FGM piezo-laminated cylindrical shell filled with and submerged in compressible fluids. Eng. Struct. 2019, 197, 109323. [Google Scholar] [CrossRef]
- Almajid, A.; Taya, M.; Hudnut, S. Analysis of out-of-plane displacement and stress field in a piezocomposite plate with functionally graded microstructure. Int. J. Solids Struct. 2001, 38, 3377–3391. [Google Scholar] [CrossRef]
- Koizumi, M. FGM activities in Japan. Compos. Part B Eng. 1997, 28, 1–4. [Google Scholar] [CrossRef]
- Nguyen, T.N.; Thai, C.H.; Nguyen, X.H.; Lee, J. Geometrically nonlinear analysis of functionally graded material plates using an improved moving Kriging meshfree method based on a refined plate theory. Compos. Struct. 2018, 193, 268–280. [Google Scholar] [CrossRef]
- Shah, S.; Panda, S.K. Thermoelastic fracture behavior of bimodular functionally graded skin-stiffener composite panel with embedded inter-laminar delamination. J. Reinf. Plast. Compos. 2017, 36, 1439–1452. [Google Scholar] [CrossRef]
- He, X.T.; Pei, X.X.; Sun, J.Y.; Zheng, Z.L. Simplified theory and analytical solution for functionally graded thin plates with different moduli in tension and compression. Mech. Res. Commun. 2016, 74, 72–80. [Google Scholar] [CrossRef]
- He, X.T.; Li, Y.H.; Liu, G.H.; Yang, Z.X. Non-linear bending of functionally graded thin plates with different moduli in tension and compression and its general perturbation solution. Appl. Sci. 2018, 8, 731. [Google Scholar] [CrossRef] [Green Version]
- Vincent, J.J. The bending of a thin circular plate. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1931, 12, 185–196. [Google Scholar] [CrossRef]
- Chien, W.Z. Large deflection of a circular clamped plate under uniform pressure. Chin. J. Phys. 1947, 7, 102–113. [Google Scholar]
- Hu, H.C. On the large deflection of a circular plate under combined action of uniformly distributed load and concentrated load at the center. Chin. J. Phys. 1954, 10, 383–394. [Google Scholar]
- Schmidt, R.; DaDeppo, D.A. A new approach to the analysis of shells, plates and membranes with finite deflections. Int. J. Non-Linear Mech. 1974, 9, 409–419. [Google Scholar] [CrossRef]
- Hwang, C. Large deflection of circular plate under compound load. Appl. Math. Mech. Engl. Ed. 1983, 4, 791–804. [Google Scholar]
- Chen, S.L.; Kuang, J.C. The perturbation parameter in the problem of large deflection of clamped circular plates. Appl. Math. Mech. Engl. Ed. 1981, 2, 137–154. [Google Scholar]
- Nayfeh, A.H. Perturbation Methods; John Wiley & Sons: New York, NY, USA; London, UK; Sydney, Australia, 1973. [Google Scholar]
- Chien, W.Z.; Yeah, K.Y. On the large deflection of the circular plate. Chin. J. Phys. 1954, 10, 209–238. [Google Scholar]
- Shen, H.S. A Two-Step Perturbation Method in Nonlinear Analysis of Beams, Plates and Shells; Higher Education Press: Beijing, China, 2013. [Google Scholar]
- Chien, W.Z.; Ye, K.Y. Mechanics of Elasticity, 1st ed.; Science Press: Beijing, China, 1956. [Google Scholar]
- Muradova, A.D.; Stavroulakis, G.E. Mathematical models with buckling and contact phenomena for elastic plates: A review. Mathematics 2020, 8, 566. [Google Scholar]
- He, X.-T.; Yang, Z.-X.; Li, Y.-H.; Li, X.; Sun, J.-Y. Application of multi-parameter perturbation method to functionally-graded, thin, circular piezoelectric plates. Mathematics 2020, 8, 342. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions | Case (a) | Case (b) | Case (c) | Case (d) |
|---|---|---|---|---|
| Edge (1) | K = 0.0986,V = 1.0015, λ1 = 0,λ2 = 3.0769. | K = 0.0869,V = 1.0195, λ1 = 0,λ2 = 3.0769. | K = 0.1024,V = 1.0015, λ1 = 0,λ2 = 3.0769. | K = 0.0831,V = 1.0195, λ1 = 0,λ2 = 3.0769. |
| Edge (2) | K = 0.0986,V = 1.0015, λ1 = λ2 = 0. | K = 0.0869,V = 1.0195, λ1 = λ2 = 0. | K = 0.1024,V = 1.0015, λ1 = λ2 = 0. | K = 0.0831,V = 1.0195, λ1 = λ2 = 0. |
| Edge (3) | K = 0.0986,V = 1.0015, λ1 = 1.5363,λ2 = 3.0769. | K = 0.0869,V = 1.0195, λ1 = 1.5493,λ2 = 3.0769. | K = 0.1024,V = 1.0015, λ1 = 1.5386,λ2 = 3.0769. | K = 0.0831,V = 1.0195, λ1 = 1.5470,λ2 = 3.0769. |
| Edge (4) | K = 0.0986,V = 1.0015, λ1 = 1.5363,λ2 = 0. | K = 0.0869,V = 1.0195, λ1 = 1.5493,λ2 = 0. | K = 0.1024,V = 1.0015, λ1 = 1.5386,λ2 = 0. | K = 0.0831,V = 1.0195, λ1 = 1.5470,λ2 = 0. |
| Cases | Formulas |
|---|---|
| (1) Rigidly clamped | |
| (a) | P = (3.3656 − 5.0466T2)Wm3 + 6.3082 Wm W = [−0.0047η6 − (0.0141 + 3.2T2)η5 − (0.0353 − 4T2)η4 − 0.1918η3 + (0.2459 − 0.8T2)η2]Wm3 + η2Wm |
| (b) | P = (3.4263 − 4.4498T2)Wm3 + 5.5623Wm W = [−0.0054η6 − (0.0163 + 3.2T2)η5 − (0.0407 − 4T2)η4 − 0.2214η3 + (0.2839 − 0.8T2)η2]Wm3 + η2Wm |
| (c) | P = (3.3656 − 5.2430T2)Wm3 + 6.5538Wm W = [−0.0045η6 − (0.0136 + 3.2T2)η5 − (0.0339 − 4T2)η4 − 0.1846η3 + (0.2367 − 0.8T2)η2]Wm3 + η2Wm |
| (d) | P = (3.4263 − 4.2534T2)Wm3 + 5.3167Wm W = [−0.0057η6 − (0.0170 + 3.2T2)η5 − (0.0426 − 4T2)η4 − 0.2316η3 + (0.2970 − 0.8T2)η2]Wm3 + η2Wm |
| (2) Movably clamped | |
| (a) | P = (1.0831 − 5.0466T2)Wm3 + 6.3082Wm W = [−0.0047η6 − (0.0141 + 3.2T2)η5 − (0.0353 − 4T2)η4 − 0.0470η3 + (0.1011 − 0.8T2)η2]Wm3 + η2Wm |
| (b) | P = (1.1026 − 4.4498T2)Wm3 + 5.5623Wm W = [−0.0054η6 − (0.0163 + 3.2T2)η5 − (0.0407 − 4T2)η4 − 0.054η3 + (0.1168 − 0.8T2)η2]Wm3 + η2Wm |
| (c) | P = (1.0831 − 5.2430T2)Wm3 + 6.5538Wm W = [−0.0045η6 − (0.0136 + 3.2T2)η5 − (0.0339 − 4T2)η4 − 0.0453η3 + (0.0973 − 0.8T2)η2]Wm3 + η2Wm |
| (d) | P = (1.1026 − 4.2534T2)Wm3 + 5.3167Wm W = [−0.0057η6 − (0.0170 + 3.2T2)η5 − (0.0426 − 4T2)η4 − 0.0568η3 + (0.1222 − 0.8T2)η2]Wm3 + η2Wm |
| (3) Simply hinged | |
| (a) | P = (2.9072 − 1.8742T2)Wm3 + 1.5489Wm W = [−0.000069η6 − (0.001172 + 0.047371T2)η5 − (0.009895 + 0.213703T2)η4 − (0.081639 + 0.195165T2)η3 + (0.022780 + 0.112025T2)η2 + (0.069996 + 0.344215T2)η]Wm3 + (0.245540η2 + 0.754460η)Wm |
| (b) | P = (2.9617 − 1.6315T2)Wm3 + 1.3571Wm W = [−0.000079η6 − (0.001337 + 0.046479T2)η5 − (0.011358 + 0.211935T2)η4 − (0.093963 + 0.197765T2)η3 + (0.026042 + 0.111302T2)η2 + (0.080693 + 0.344876T2)η]Wm3 + (0.243988η2 + 0.756011η)Wm |
| (c) | P = (2.9072 − 1.9428T2)Wm3 + 1.6074Wm W = [ − 0.000067η6 − (0.001125 + 0.047212T2)η5 − (0.009514 + 0.213389T2)η4 − (0.078537 + 0.195631T2)η3 + (0.021888 + 0.111897T2)η2 + (0.067355 + 0.344334T2)η]Wm3 + (0.245263η2 + 0.754737η)Wm |
| (d) | P = (2.9614 − 1.5630T2)Wm3 + 1.2987Wm W = [−0.000083η6 − (0.001401 + 0.046633T2)η5 − (0.011895 + 0.212243T2)η4 − (0.098356 + 0.197315T2)η3 + (0.027292 + 0.111429T2)η2 + (0.084443 + 0.344763T2)η]Wm3 + (0.244258η2 + 0.755741η)Wm |
| (4) Simply supported | |
| (a) | P = (0.4135 − 1.8742T2)Wm3 + 1.5489Wm W = [−0.000069η6 − (0.001172 + 0.047371T2)η5 − (0.009895 + 0.213703T2)η4 − (0.035988 + 0.195165T2)η3 + (0.011571 + 0.112025T2)η2 + (0.035553 + 0.344215T2)η]Wm3 + (0.245540η2 + 0.754460η)Wm |
| (b) | P = (0.4203 − 1.6315T2)Wm3 + 1.3571Wm W = [−0.000079η6 − (0.001337 + 0.046479T2)η5 − (0.011358 + 0.211935T2)η4 − (0.041540 + 0.197765T2)η3 + (0.013252 + 0.111302T2)η2 + (0.041061 + 0.344876T2)η]Wm3 + (0.243988η2 + 0.756011η)Wm |
| (c) | P = (0.4135 − 1.9428T2)Wm3 + 1.6074Wm W = [−0.000067η6 − (0.001125 + 0.047212T2)η5 − (0.009514 + 0.213389T2)η4 − (0.034638 + 0.195631T2)η3 + (0.011121 + 0.111897T2)η2 + (0.034223 + 0.344334T2)η]Wm3 + (0.245263η2 + 0.754737η)Wm |
| (d) | P = (0.4204 − 1.5630T2)Wm3 + 1.2987Wm W = [−0.000083η6 − (0.001401 + 0.046633T2)η5 − (0.011895 + 0.212243T2)η4 − (0.043460 + 0.197315T2)η3 + (0.013883 + 0.111429T2)η2 + (0.042956 + 0.344763T2)η]Wm3 + (0.244258η2+0.755741η)Wm |
| Edges | Wm | T = 0 | T = 0.05 | T = 0.2 | ||
|---|---|---|---|---|---|---|
| Present | Errors 1 | Present | Errors | |||
| (1) | 1 | 9.6738 | 9.6612 | 0.13% | 9.4719 | 2.13% |
| 2 | 39.5411 | 39.4401 | 0.26% | 37.9262 | 4.26% | |
| 3 | 109.7953 | 109.4547 | 0.31% | 104.3450 | 5.22% | |
| 4 | 240.6300 | 239.8225 | 0.34% | 227.7106 | 5.67% | |
| (2) | 1 | 7.3913 | 7.3786 | 0.17% | 7.1894 | 2.81% |
| 2 | 21.2809 | 21.1800 | 0.48% | 19.6660 | 8.21% | |
| 3 | 48.1673 | 47.8266 | 0.71% | 42.7170 | 12.76% | |
| 4 | 94.5486 | 93.7411 | 0.86% | 81.6292 | 15.83% | |
| (3) | 1 | 4.4561 | 4.4514 | 0.11% | 4.3811 | 1.71% |
| 2 | 26.3552 | 26.3177 | 0.14% | 25.7554 | 2.33% | |
| 3 | 83.1403 | 83.0137 | 0.15% | 81.1161 | 2.50% | |
| 4 | 192.2544 | 191.9545 | 0.16% | 187.4563 | 2.56% | |
| (4) | 1 | 1.9624 | 1.9577 | 0.24% | 1.8875 | 3.97% |
| 2 | 6.4060 | 6.3685 | 0.59% | 5.8062 | 10.33% | |
| 3 | 15.8118 | 15.6850 | 0.81% | 13.7876 | 14.68% | |
| 4 | 32.6609 | 32.3610 | 0.93% | 27.8628 | 17.22% | |
| Wm | Edge (1) | Edge (2) | Edge (3) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| T = 0 | T = 0.2 | Errors 1 | T = 0 | T = 0.2 | Errors | T = 0 | T = 0.2 | Errors | |
| 0.1 | 0.4065 | 0.4063 | 0.03% | 0.4014 | 0.4012 | 0.03% | 0.005819 | 0.005823 | 0.07% |
| 0.5 | 2.2427 | 2.2269 | 0.70% | 2.0555 | 2.0395 | 0.78% | 0.1477 | 0.1486 | 0.61% |
| 1.0 | 5.4757 | 5.3515 | 2.27% | 4.4151 | 4.2868 | 2.91% | 0.6230 | 0.6382 | 2.44% |
| 1.5 | 10.5032 | 10.0911 | 3.92% | 7.3830 | 6.9500 | 5.87% | 1.5233 | 1.6003 | 5.05% |
| 2.0 | 18.1728 | 17.2124 | 5.29% | 11.2633 | 10.2368 | 9.11% | 3.0104 | 3.2538 | 8.09% |
| 2.5 | 29.3752 | 27.5316 | 6.28% | 16.3600 | 14.3552 | 12.25% | 5.3111 | 5.9052 | 11.19% |
| 3.0 | 45.0445 | 41.9145 | 6.95% | 22.9774 | 19.5131 | 15.08% | 8.7169 | 9.9489 | 14.13% |
| 4.0 | 93.7361 | 86.5809 | 7.63% | 41.9906 | 33.7789 | 19.56% | 20.3338 | 24.2275 | 19.15% |
| 5.0 | 172.5850 | 159.1258 | 7.80% | 70.7358 | 54.6973 | 22.67% | 42.4889 | 50.9949 | 20.02% |
| 6.0 | 290.6206 | 268.2546 | 7.70% | 111.6461 | 83.9315 | 24.82% | 79.8466 | 96.5583 | 20.93% |
| 7.0 | 457.5646 | 423.4637 | 7.45% | 167.1544 | 123.1447 | 26.33% | 139.1077 | 168.626 | 21.22% |
| 8.0 | 683.8308 | 635.0410 | 7.13% | 239.6937 | 174.0000 | 27.41% | 225.0096 | 276.3082 | 22.80% |
| 9.0 | 980.5251 | 914.0653 | 6.78% | 331.6971 | 238.1605 | 28.20% | 349.3262 | 430.1164 | 23.13% |
| 10.0 | 1359.4454 | 1272.4067 | 6.40% | 445.5976 | 317.2895 | 28.79% | 510.8678 | 641.9639 | 25.66% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; He, X.-T.; Ai, J.-C.; Sun, J.-Y. Large Deformation Problem of Bimodular Functionally-Graded Thin Circular Plates Subjected to Transversely Uniformly-Distributed Load: Perturbation Solution without Small-Rotation-Angle Assumption. Mathematics 2021, 9, 2317. https://doi.org/10.3390/math9182317
Li X, He X-T, Ai J-C, Sun J-Y. Large Deformation Problem of Bimodular Functionally-Graded Thin Circular Plates Subjected to Transversely Uniformly-Distributed Load: Perturbation Solution without Small-Rotation-Angle Assumption. Mathematics. 2021; 9(18):2317. https://doi.org/10.3390/math9182317
Chicago/Turabian StyleLi, Xue, Xiao-Ting He, Jie-Chuan Ai, and Jun-Yi Sun. 2021. "Large Deformation Problem of Bimodular Functionally-Graded Thin Circular Plates Subjected to Transversely Uniformly-Distributed Load: Perturbation Solution without Small-Rotation-Angle Assumption" Mathematics 9, no. 18: 2317. https://doi.org/10.3390/math9182317