
Digital Twins-Based Smart Design and Control of Ultra-Precision Machining: A Review


1
The State Key Lab of Fluid Power and Mechatronic Systems, Zhejiang University, Hangzhou 310027, China
2
State Key Laboratory of Precision Electronic Manufacturing Technology and Equipment, Guangdong University of Technology, Guangzhou 510006, China
*
Author to whom correspondence should be addressed.
Symmetry 2021, 13(9), 1717; https://doi.org/10.3390/sym13091717
Submission received: 13 August 2021
/
Revised: 29 August 2021
/
Accepted: 14 September 2021
/
Published: 16 September 2021
(This article belongs to the Special Issue Asymmetric and Symmetric Study on Digital Twins and Cyber-Physical-Social Systems)
Abstract
:Ultra-Precision Machining (UPM) is a kind of highly accurate processing technology developed to satisfy the manufacturing requirements of high-end cutting-edge products including nuclear energy producers, very large-scale integrated circuits, lasers, and aircraft. The information asymmetry phenomenon widely exists in the design and control of ultra-precision machining. It may lead to inconsistency between the designed performance and operational performance of the UPM equipment on stiffness, thermal stability, and motion accuracy, which result from its design, manufacturing, and control, and determine the form accuracy and surface roughness of machined parts. The performance of the UPM equipment should be improved continuously. It is still challenging to realize the real-time and self-adaptive control, in which building a high-fidelity and computationally efficient digital twin is a valuable solution. Nevertheless, the incorporation of the digital twin technology into the UPM design and control remains vague and sometimes contradictory. Based on a literature search in the Google Scholar database, the critical issues in the UPM design and control, and how to use the digital twin technologies to promote it, are reviewed. Firstly, the digital twins-based UPM design, including bearings module design, spindle-drive module design, stage system module design, servo module design, and clamping module design, are reviewed. Secondly, the digital twins-based UPM control studies, including voxel modeling, process planning, process monitoring, vibration control, and quality prediction, are reviewed. The key enabling technologies and research directions of digital twins-based design and control are discussed to deal with the information asymmetry phenomenon in UPM.
1. Introduction
At the end of the 1950s, due to the development of aerospace and national defense technologies, the United States took the lead in the development of ultra-precision machining technology and developed the Single Point Diamond Turning technology for manufacturing laser fusion reflector and large spherical/aspheric parts used in tactical missile and manned spacecraft. Ultra-Precision Machining (UPM) technology is a kind of highly accurate processing technology developed to satisfy the manufacturing requirements of high-end cutting-edge products including nuclear energy producers, very large-scale integrated circuits, lasers, and aircraft. The UPM could be typically categorized into ultra-precision diamond turning, ultra-precision diamond milling, ultra-precision diamond scratching, ultra-precision grinding, and ultra-precision polishing [1]. A large number of UPM products are used in airplanes represented by Airbus and Boeing, mobile phones represented by Apple, Samsung, and Huawei, and automobiles represented by General Motors and Volkswagen. The goal of machining dimension accuracy is moving towards the nanometer dimension.
UPM is characterized by its special requirements on workpiece material, processing equipment, tools, measurement, and environment control. Stable temperature, humidity, and air cleanliness must be maintained, and effective active vibration countermeasures should be taken. The systematic error and random error in the UPM equipment should be regulated at the level of 0.1 microns or less. These conditions are obtained by the comprehensive application of precision machinery, sensors, servo system, numerical control, and advanced computing technologies. However, conventional optimization methods are usually computationally costly, and cannot realize the online control. Moreover, the UPM achieves high quality and integrity at the expense of the low efficiency of machining. It is reported that the processing time for complex part machining accounts for 20% of its manufacturing time, which is a critical reason restricting the increment of machining efficiency. Traditionally, the used hardware and software of the manufacturing systems are not integrated appropriately, or isolated, which might lead to reworking and errors. A case of precision mold-making reported that 40% of manufacturing time can be avoided via a cyber-physical system approach [2]. The information asymmetry phenomenon widely exists in the design and control of ultra-precision machining. It may lead to inconsistency between the designed performance and operation performance on stiffness, thermal stability, and motion accuracy of the UPM equipment, which results from its design, manufacturing, and control, determining the form accuracy and surface roughness of machined parts. Building a digital twin is an essential approach to support the computationally efficient design and parallel control optimization algorithm [3].
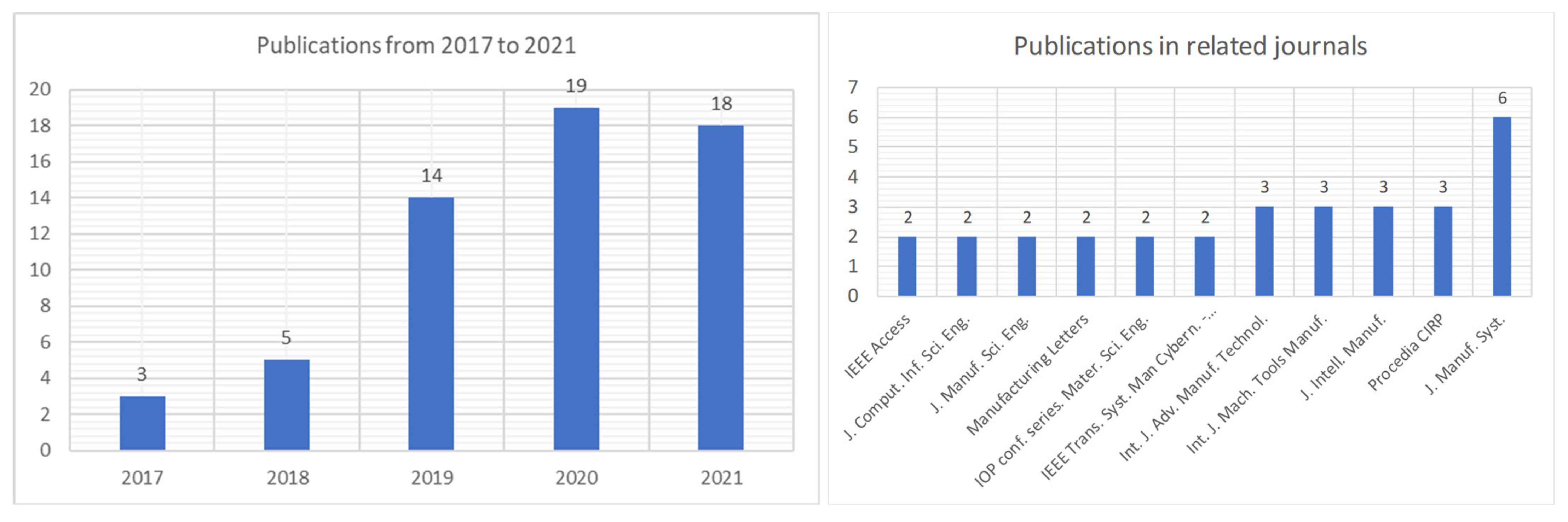
Nevertheless, the incorporation of the digital twin technology into the UPM design and control remains vague and sometimes contradictory. A literature search was undertaken in the Google Scholar database to survey the critical issues in the UPM design and control, and how to use the digital twin technologies to promote it. Google scholar’s database is widely recognized as the world’s most comprehensive academic search engine that records the peer-reviewed online academic journals, books, conference papers, dissertations, preprints, technical reports, and other academic literature, as well as patents. One shortcoming of using the Google Scholar database for literature review is the relatively low quality of retrieved results due to the wide range of literature sources, and therefore a manual theoretical screening process is conducted to identify high-quality papers. Firstly, two words “digital twin” and “precision machining” are used for retrieving related papers, which yields 87 papers (up to 30 June 2021). Secondly, 52 high-quality papers related to the UPM design and control are included via a theoretical screening process. Additionally, 12 other papers are added to make this review comprehensive; eventually, this review includes 64 references. The statistics of the collected literature are shown in Figure 1. From the year 2017 to 2021, research on digital twins-based UPM grows significantly. The top five most popular journals publishing the research on digital twins-based UPM include Journal of Manufacturing Systems, Procedia CIRP, Journal of Intelligent Manufacturing, International Journal of Machine Tools and Manufacture, and The International Journal of Advanced Manufacturing Technology.
In this review, the digital twins-based UPM design, including bearings module design, spindle-drive module design, stage system module design, servo module design, and clamping module design, is reviewed. The digital twins-based UPM control studies, including voxel modeling, process planning, process monitoring, vibration control, and quality prediction, are reviewed. The key enabling technologies and research directions of digital twins-based UPM smart design and control are discussed.
The rest of the paper is organized as follows. Section 2 reviews the design and control challenges towards precision machining. Section 3 presents a framework for incorporating digital twins into UPM design and control. Section 4 and Section 5 present the research progress of digital twins-based UPM design and control, respectively. Section 6 details key enabling technologies and future research directions in engineering the digital twins-based UPM design and control. Finally, Section 7 draws concluding remarks.
2. Challenges in Design and Control of UPM
Figure 2 provides an overview of both the traditional and non-traditional UPM methods. The traditional UPM typically includes ultra-precision diamond turning, ultra-precision grinding, ultraprecision diamond milling, ultra-precision diamond scratching, and ultra-precision polishing. The traditional UPM method cannot satisfy the machining accuracy demands of the nanometer or even atomic-unit scale (atomic lattice distance is 0.1~0.2 nanometers). This kind of situation calls for the non-traditional UPM methods which use chemical energy, electrochemical energy, thermal energy, or electric energy so that these energies beyond the binding energy between atoms. In this way, the adhesion, bonding or lattice deformation of some atoms on the surface of the workpiece can be removed to achieve the purpose of ultra-precision machining. The non-traditional UPM typically includes mechanochemical polishing, ion sputtering, electron beam exposure, ion implantation, metal evaporation, laser beam processing, and molecular beam epitaxy. The characteristic of these non-traditional UPM methods is that the material in the surface layer can be removed or added in an ultra-fine-grained control level.
However, it still depends on the precise equipment, together with its control system, to obtain the ultra-precision machining accuracy and surface roughness. The machining error refers to the transformation of the relative motion of the cutting tool and the workpiece-in-process in the machining state, due to the unbalanced thermal distribution of the UPM equipment and the machining load, which is specifically reflected in the position error, shape error, and surface roughness of the workpiece. As shown in Figure 2, there exist many sources resulting in machining errors in UPM. The machining accuracy and surface roughness of the workpiece-in-process mainly depends on the mutual position between the workpiece-in-process and the cutting tool in the machining process. It generally includes machine tool geometric error, control error, thermal (deformation) error, force (deformation) error, motion error, and positioning error.
The performance of motion accuracy, stiffness, reliability, stability, flexibility, and capability of UPM equipment results from the design and control, which directly results in the form accuracy and surface roughness of machined parts. Improvements in thermal stability, precise spindle bearing, precise linear guides, and high resolution of linear and rotary motions are critical [4]. For example, in the plate making of VLSI (i.e., Very Large Scale Integrated Circuits), the photoresist on the mask is exposed by an electron beam, so that the atoms of the photoresist are directly polymerized (or decomposed) under the impact of electrons; then, the polymerized or unpolymerized part is dissolved by the contrast agent to make the mask. The manufacturing of electron beam exposure plates require the use of ultra-precision machining equipment with positioning accuracy of up to ±0.01 micron. The precision and stability of the UPM equipment should be improved continuously, in which the digital twin technology is a valuable solution.
3. Framework for Incorporating Digital Twins into UPM Design and Control
The extension of simulation from the product design stage to following-up lifecycle stages is the research trend. It is difficult to guarantee product quality if the design has not been verified. Simulation helps support the design and monitoring visualization. Developing a unified multi-discipline model for UPM design and control is critical. A potential solution is to develop digital twins that observe and reflect the physical UPM behavior and use it in guiding the optimizing decisions in the design and control stages. Digital twins are developed by integrating multiphysics cyber models with the real-time data of a product/system. Cyber models can be timely fine-tuned, optimized, and validated to avoid the risk of inaccuracy that the UPM processes brings.
The design of a UPM starts with the concepting, forming, and fine-tuning of its corresponding digital twin [5]. The concepting stage implies performing a fast multi-disciplinary simulation to rapidly validate the conceptual scheme while not pursuing simulation accuracy. The forming stage is to determine key technical parameters of the digital twins via semi-physical simulations, as the physical UPM is an indeterminate design in this stage. The fine-tuning stage is to leanly optimize the digital twins in the early usage stage of UPM based on its reconfigurability and flexibility [6]. The benefit of incorporating digital twins in UPM design and control is to cut down the cost of pure-physical commissioning. The designed digital twin can be used for optimizing controls, diagnosing, and prognosis in subsequent lifecycle activities.
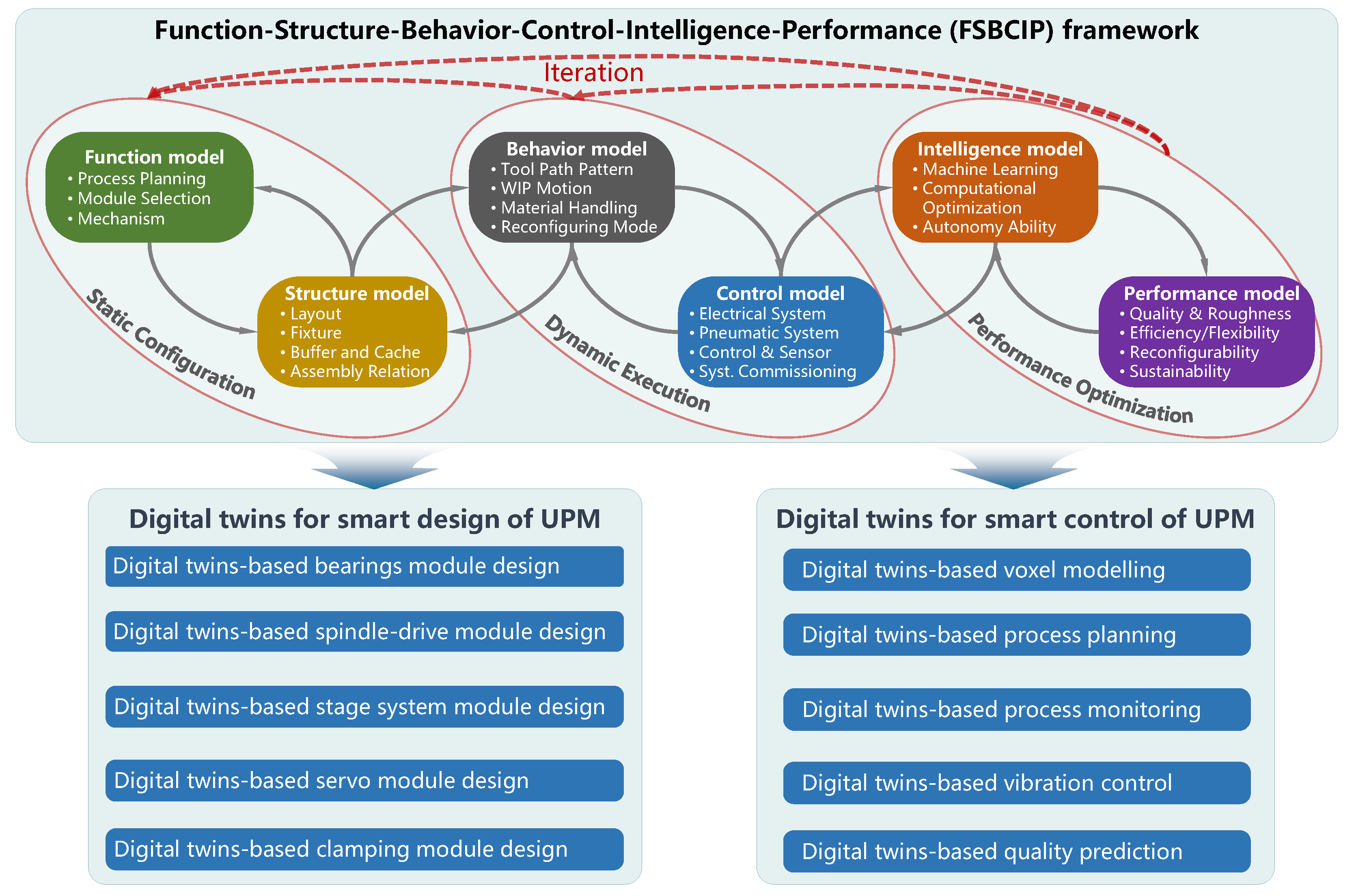
The UPM equipment is a complicated system integration of different functional modules. The design and control of UPM essentially involve the functional, structural, and behavioral aspects. As shown in Figure 3, incorporating digital twins into UPM design and control could be implemented according to Function–Structure–Behavior–Control–Intelligence–Performance (FSBCIP) framework [5]: (1) The function dimension is a formal characterization of the activities and their relationships for machining the workpieces/features; (2) The structure dimension is a formal characterization of the fusion, connection, and assembly relationships of the mechanical modules that fulfill machining functions; (3) The behavior dimension is a formal characterization of the mechanical motion transmissions, the motion form transformations, and mutual relationships (e.g., force, displacement or velocity); (4) The control dimension includes the structural, operational, or calculus of a process by statistical or engineering approaches to regulate the outputted machining process; (5) The intelligence dimension describes, develops, and verifies the learning ability, optimization ability, and autonomy ability of a UPM from the control algorithm viewpoint; and (6) The performance dimension evaluates and optimizes the system performance including accuracy, efficiency, flexibility, reliability, and adaptivity.
Abstracting and using the above six models in digital twins could benefit the accuracy and efficiency of the design and control of UPM equipment. In fact, the FSBCIP framework could be divided into two levels, namely, the basic Function–Structure–Behavior level, and the advanced Control–Intelligence–Performance level. The following two sections will review the digital twins-based UPM design and control from these two levels, respectively.
4. Digital Twins for Smart Design of UPM
The machining precision requirements become more and more complicated under the increasing complexity of parts surface (such as asymmetric free form surface). The key to achieving ultra-precision for different machining requirements lies in the structure design of the UPM equipment, such as the spindle, guide rail, stage system, clamping of the workpiece, in-place measurement, adjustment, tool alignment, and micro-ultra-precision cutting tools. Computer-aided design tools enable the automatic generation of configurations. Computer-aided design verification is a technique for verifying and fine-tuning the design solutions/decisions [7]. Building the digital twin in the early design stage could cut down the cost in physical commissioning, and thus avoid the costly resolving of design inefficiencies [8]. This section discusses the research status of incorporating digital twins into the smart design of UPM equipment, as well as its components, such as bearing slideways, spindle-drive, stage module, servo module, and clamping module, as shown in Table 1.
4.1. Digital Twins-Based Bearings Module Design
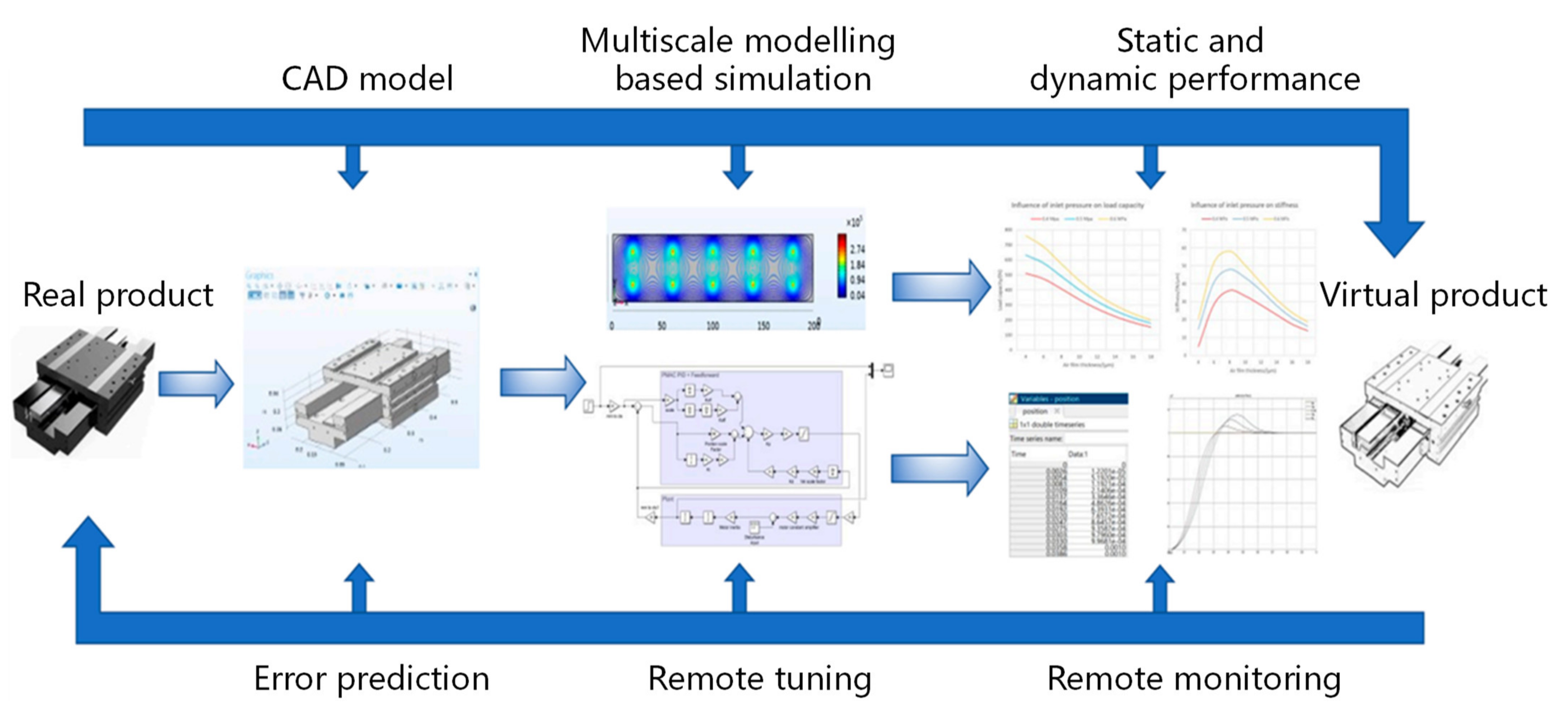
Bearings (e.g., mechanical type, hydraulic type, and aerostatic type) are important components in the UPM equipment. Additionally, the motion accuracy, max speed, and friction are critical indexes to evaluate its performance. The use of air float, liquid float, and other ways in the bearing, guide rail, and balance mechanism has become an inevitable choice to realize the high resolution and real-time requirements. How to achieve precision, reliability, and sustainability in the design and operating of bearings faces many uncertainties for addressing rapid-changing requirements in diverse UPM scenarios. A balance among the design parameters, including available feed velocity, achievable precision, and resulting friction force, is desirable [14]. Gou et al. [9] built a multi-scale modeling and analysis kernel of the digital twin for simulating the mechanical design, direct-drive and control, dynamics tuning, and entire mechatronic system integration of the aerostatic bearing slideways (Figure 4). They defined that the bearing slideway digital twin is the collection of all digital artifacts that accumulate during its development, integrating all data that is generated during product design and use. Based on the digital twin approach, the performance of the designed aerostatic bearing slideways can be predicted and assessed in the operating process, and thus helping Research and Development engineers to carry out product iteration and design optimization.
The digital twin system plays a fundamental role in continuously improving the operating performance of bearing slideways as well as optimizing end-user experience. The artificial intelligence algorithm coded in the digital twin may prevent the degradation of machining accuracy resulting from the acceleration change of the slideway at the end of the running track. By collecting and analyzing the operating data together with the corresponding preset parameters, some out-of-control vibrations could be predicted in advance, and thus engineers could remotely tune or adjust control parameters.
4.2. Digital Twins-Based Spindle-Drive Module Design
The performance of the spindle, together with its drive system of UPM equipment, is one of the main mechanical modules that determine the ultra-precision machining accuracy and directly affect the finished quality of workpieces. It is usually coupled with a gearbox, coolant system, headstock, water-cooled motor, machine tool’s ram, and transmission system. The design of the spindle-drive module is supposed to achieve a balance among the anti-vibration capability, torque/speed range, and cost. Liu et al. [10] proposed a semi-physical simulation-based current hysteresis control design model for motorized spindle-driven systems, in which the designed control system can be conveniently deployed to the digital signal processing chip to time-efficiently and cost-economically verify its performance instead of destructive tests. By engineering a digital twin model of the spindle-drive module, the cost/waste forecasting and fault diagnosis of physical entities could be realized.
4.3. Digital Twins-Based Stage System Module Design
Ultra-precision (multi-axis) stage with high linear-motion speed, accurate positioning resolution, and large travel range is widely used in UPM. It is usually comprised of an ultra-precision stage which consists of linear motors (e.g., voice coil motors), flexure hinges, piezoelectric actuator, and ultra-precision linear encoder. The stage modules are supposed to be capable of sub-micron/nanometer positioning resolution/accuracy while holding features including high speed, long motion stroke, and compact size. The macro–micro composite method, which comprises the macro-motion part and the micro-motion part, is a popular concept in ultra-precision stage research, due to its long-stroke, high-velocity, and high-precision metrics. To achieve an improvement of the machining accuracy and efficiency, Chen et al. [11] proposed an event-triggered optimal control method for macro–micro composite stage systems via a single-network adaptive dynamic programming method. The major barrier that impedes the establishment of the digital twin of the stage module is the simulation modeling and optimizing of the fast adaptive control algorithm.
4.4. Digital Twins-Based Servo Module Design
The ultra-precision servo and drive control are critical for realizing nanoscale repeated positioning accuracy in the optical level UPM. The dynamic tracking of the tool path usually suffers from a lag phenomenon when the high-performance servo motion controller performs curved surface machining via the conventional first-order differential control and the second-order differential control. This lag is small, but cannot be ignored in UPM. (Ultra-)Fast tool servo (FTS) is an effective technology enabling the machining of complex surface microstructure. Tang et al. [12] proposed a flexure-based FTS device composed of two platforms and three-branched chains for supporting robotic UPM with XYZ translational precision motion. In servo module design, it is critical to eliminate nonlinear factors including the friction effect of moving mechanism with nonlinear characteristics, in which the establishment of a high-fidelity digital twin model is essential.
4.5. Digital Twins-Based Clamping Module Design
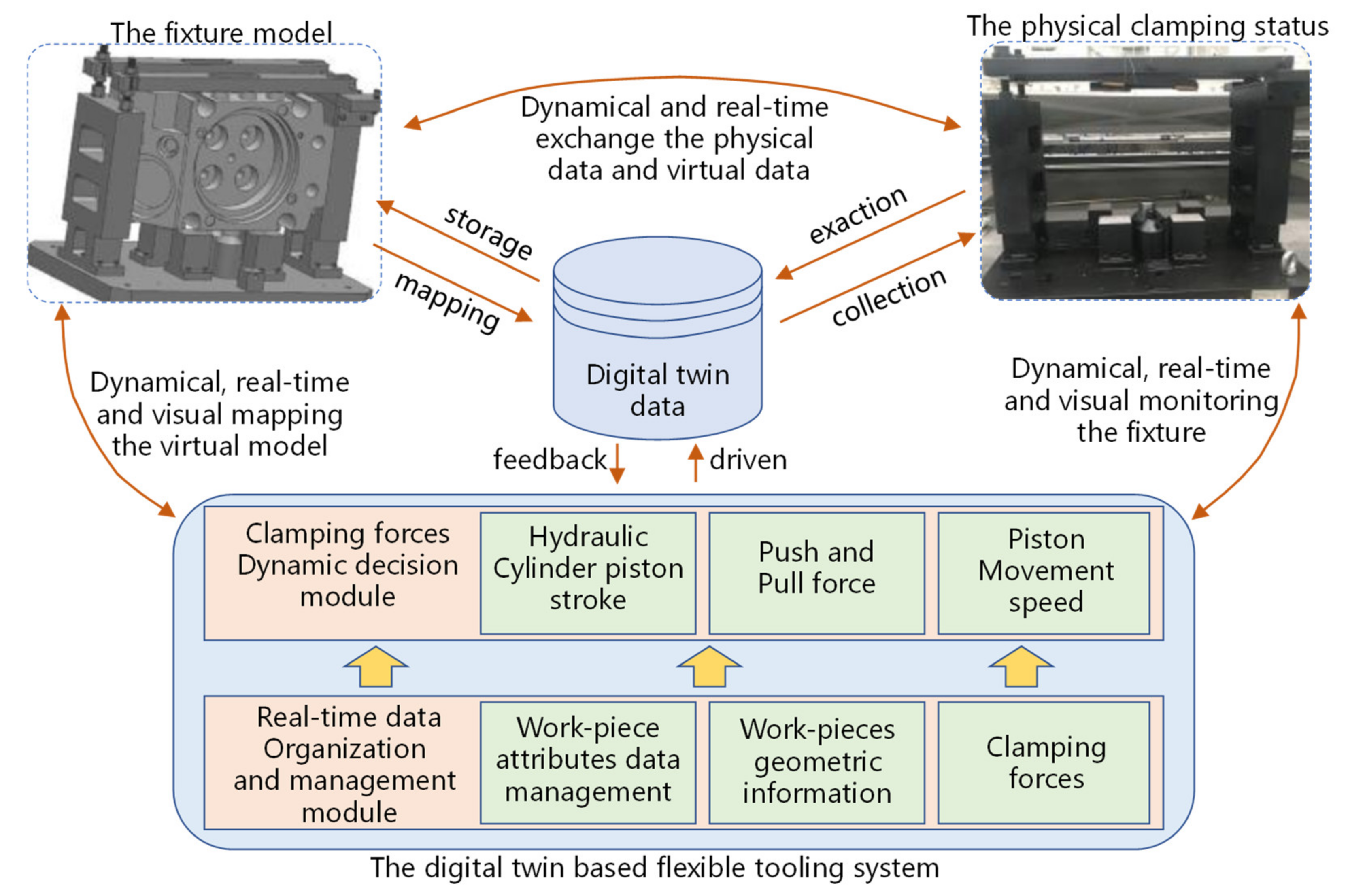
Dynamic clamping of workpieces is critical to shortening the preparation time of manufacturing. Computer-aided design tools are critical for the verification of design quality. Kang et al. [15] introduced a comprehensive computer-aided design verification model for fixture designing, using geometric and kinetic models for locating tolerance assignment, determining the required minimum clamping force, and verifying the fixturing accuracy and stability in the UPM process. As shown in Figure 5, Liu et al. [13] proposed a digital twin-based flexible tooling system that supports real-time geometry data-driven dynamic decision of the clamping forces and positioning. The clamping accuracy and efficiency could be improved based on the digital twin technology. Compared to the traditional fixture, planners can clamp the workpiece more clearly and effectively based on the digital twin model.
Besides the above studies on the digital twin-based design of modules/components, the commissioning and assembly of whole UPM equipment could be also facilitated by introducing digital twin technology [16]. The captured design and operating data of the full life cycle of UPM equipment can help designers carry out UPM product iteration and design optimization.
5. Digital Twins for Smart Control of UPM
Smart control of machining parameters including force, torque, vibration, tool condition, and surface finish are essential for improving the product quality in UPM [17]. This section discusses the research status of incorporating digital twins into the smart control of UPM equipment from the voxel modeling, process planning, process monitoring, vibration control, and quality control aspects as shown in Table 2.
5.1. Digital Twins-Based Voxel Modeling
Modeling the physical state of a workpiece-in-process throughout the machining process is the foundation of adaptive control for achieving high machining quality. Many coordinated voxel modeling architectures have been proposed for taking advantage of multiple data threads in the machining process and thereby improving the quality of the machined workpiece. For instance, the deformation resulting from residual stress usually happens in machining thin-walled low-rigidity workpieces. Capturing the geometry deformation information accurately, in real time, is critical for aiding process adjustment. Hao et al. [22] proposed a time-varying deformed geometry deformation modeling method, named Curved Surface Mapping based Geometric Representation Model, which combines material removal simulation and a small amount of in-process measurement. Their experiment on structural workpiece machining showed that the error of model reconstructing deformed geometry could be controlled within 0.05 mm. It is still challenging to accurately capture and process the in situ spatial information from inside a computer numerical control UPM system.
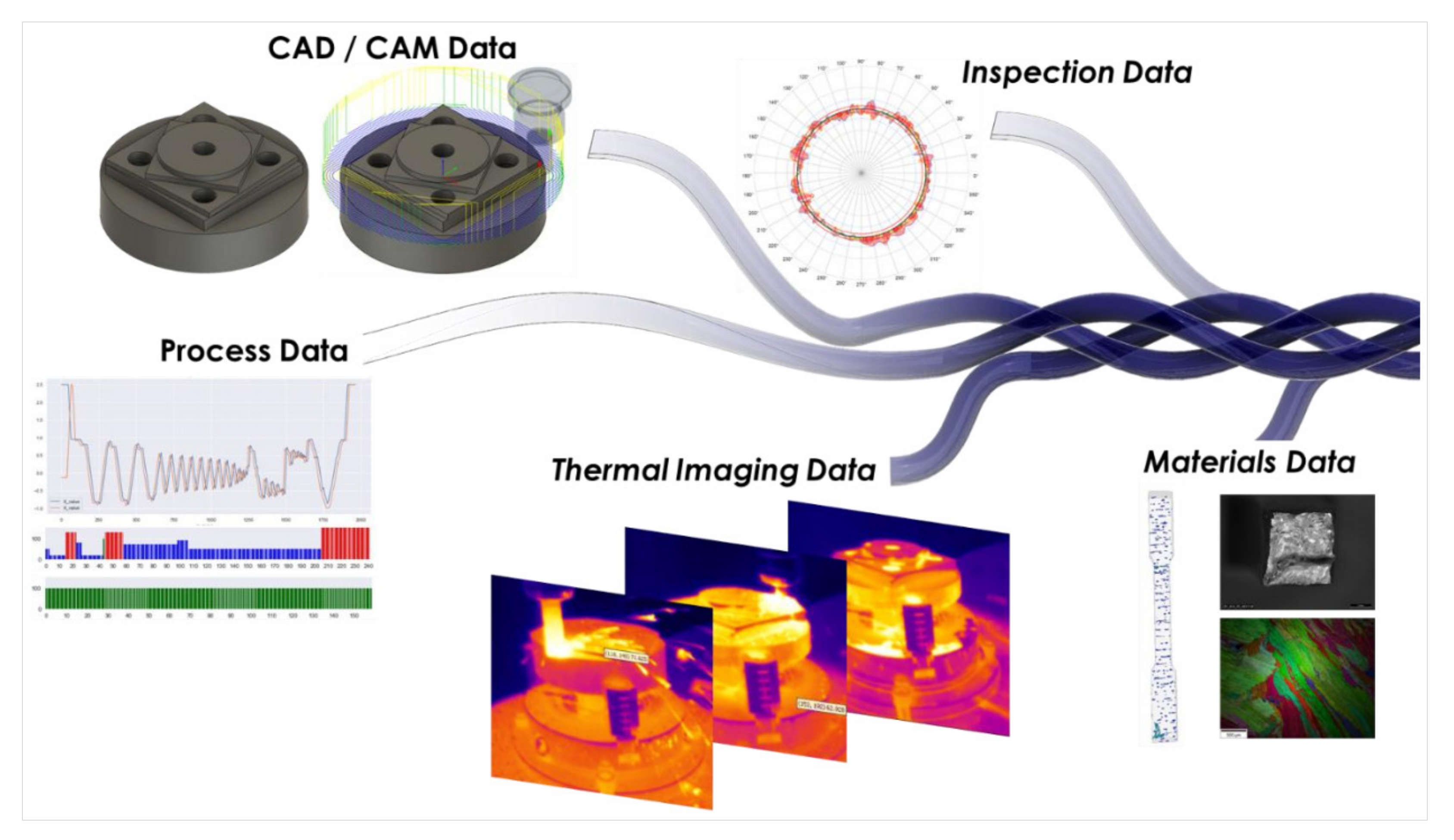
Digital twins-based voxel modeling has attracted much attention. For instance, Feldhausen et al. [21] presented a prototype system for collecting, synchronizing, fusing, and analyzing multiple streams of machining data, which supports creating and spinning the Digital Thread (Figure 6). They defined the digital thread as the integrated collection, storage, and analysis of spatial and temporal information relating to a manufactured component’s lifecycle from cradle to grave. Machining data was captured using MTConnect protocol, and could be associated with the spatial location data; in the meantime, the thermal images are captured and associated with UPM operations. Saleeby et al. [20] synchronized the in situ manufacturing process and correct geometric deviation information from multi-sensors to improve the accuracy of voxel digital twin models of the workpiece-in-process. Their experiment result showed the proposed approach could improve the accuracy of in situ digital twin models by up to 52%.
Geometrically aligning the source design model with the machining workpiece should be performed in the software for guiding and generating the toolpath for the workpiece-in-process that has been either volumetrically offset or involves additional material and volume. Collins [18] presents a voxel volume model registration method based on registering and machining near-net-shape structures and rough castings. Collins et al. [19] further presented intensity-based volume registration for irregularly shaped materials machining by integrating volumetric imaging feedback about the voxel model to machine tools. An intensity-based similarity metric, together with a metaheuristic registration algorithm, is designed based on Euclidean distance transformation and variance calculation. Steps to maximize the mutual information for the voxel-based computer-aided manufacturing model and minimize distance variance between voxel intensities are performed to guide the volume alignment registration.
Furthermore, in digital twins-based voxel modeling, sensors and highly efficient algorithms should be incorporated into machining systems to efficiently perceive the physical state of the workpiece-in-process to form a fast closed-loop control code execution architecture whereby the controller can analyze the precise geometric information to adjust subsequent controls.
5.2. Digital Twins-Based Process Planning
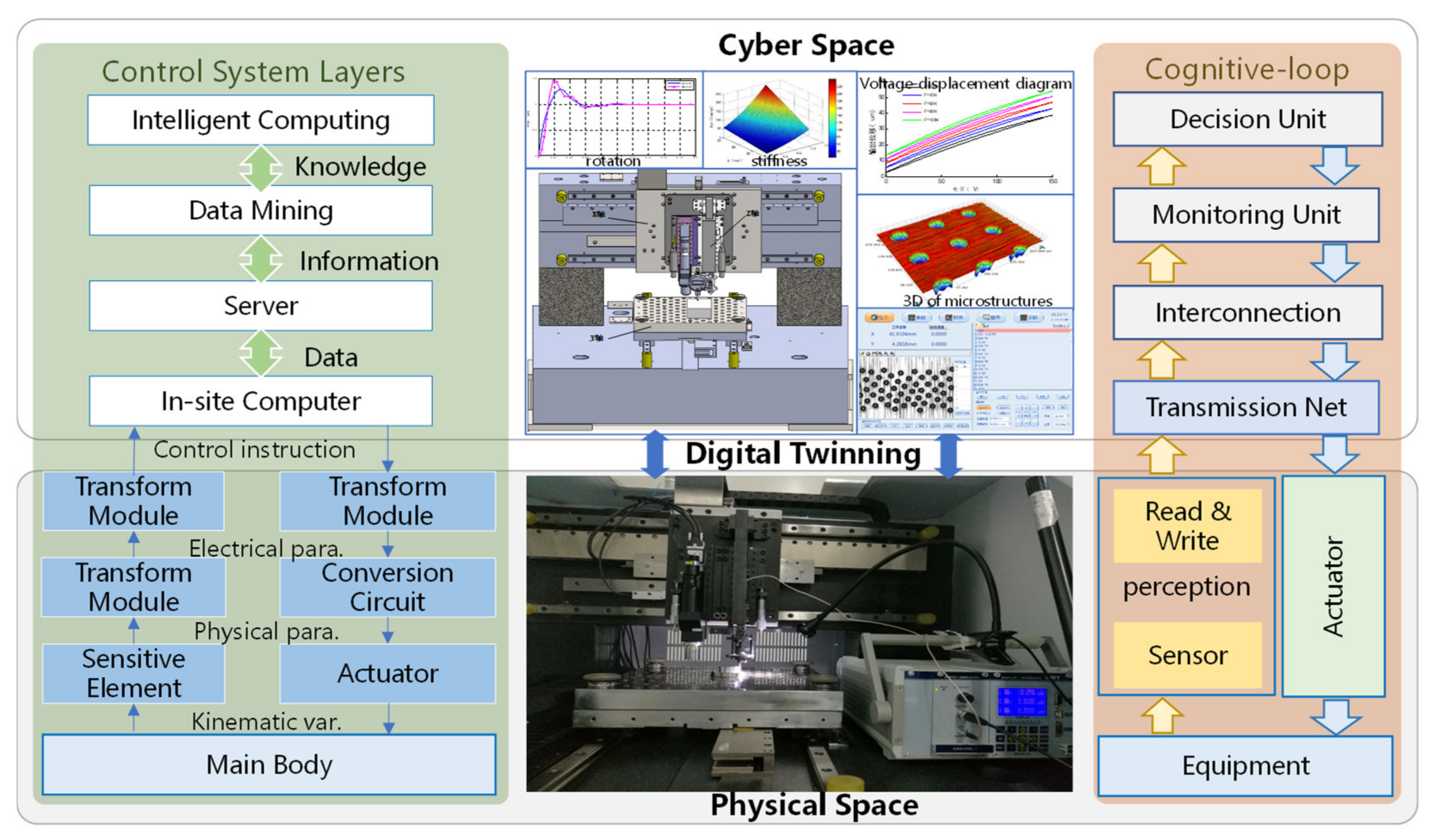
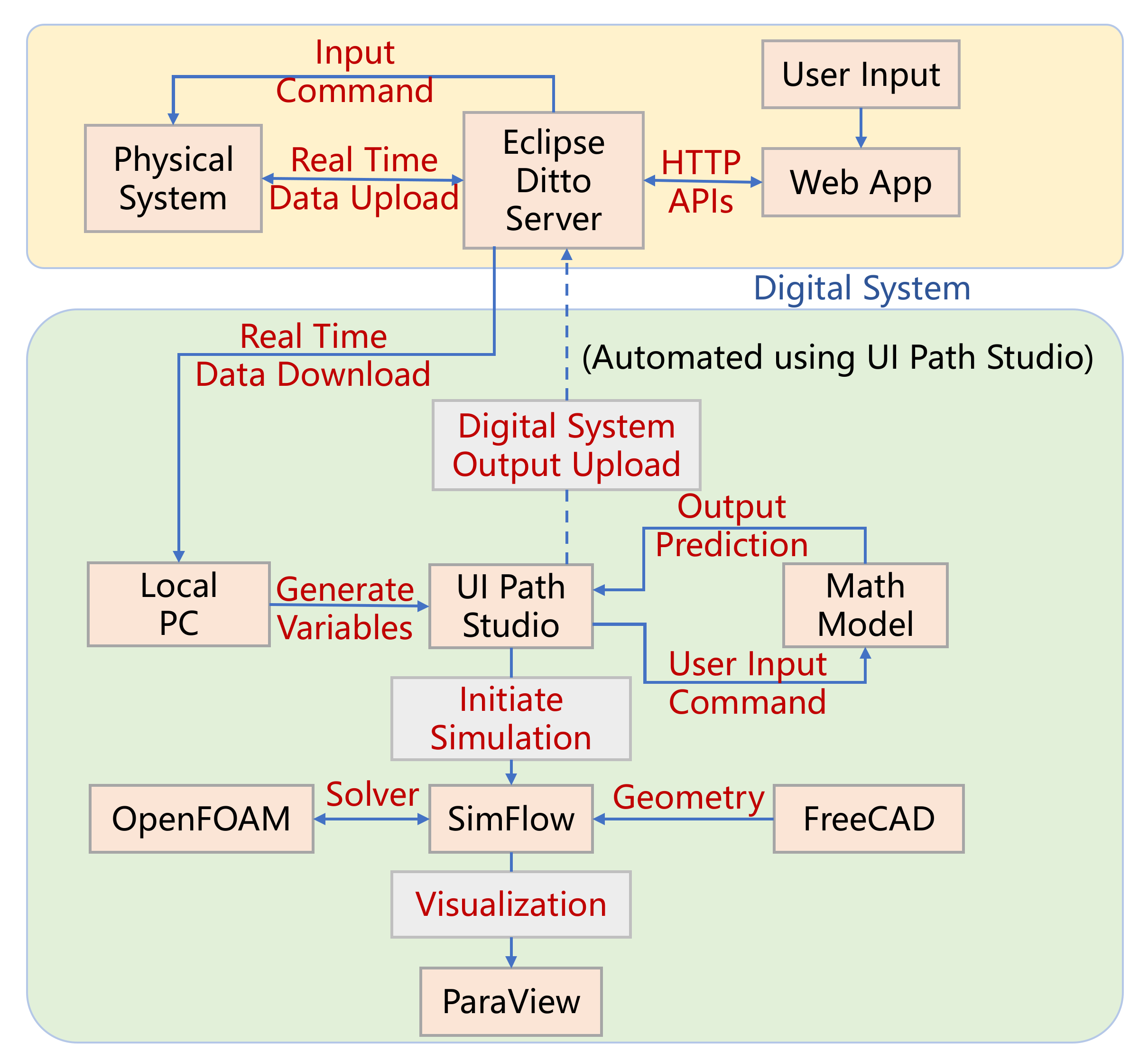
How to dynamically plan a machining process in UPM is very important to increase the machining quality and reduce the machining time. Blend manufacturing features exist in the UPM of many complex workpieces, which results in great difficulty in ensuring the accuracy of a cutting-tool feed position and automatic tool path planning while maintaining the desired machining efficiency [36]. Precise micro-process planning for generating machining instructions is critical to maximizing the performance of UPM equipment. For instance, Tanaka [26] proposed a digital twin of UPM equipment in cyberspace to collect both real and virtual machining data to derive the necessary rules for micro-process planning. Lin et al. [24] proposed a fuzzy control system for feed rate scheduling based on the data from an optical three-dimensional scanner to measure the cutting trajectory, curvature, and curvature variation. Dhanda et al. [23] presented an efficient tool path planning strategy using curvature-based segmentation of freeform surface from its representation in the form of a point cloud to partition the surface into convex, concave, and saddle-like regions. Grid-based adaptive planar tool path planning strategies were developed to machine each region separately within its boundaries. For the ultra-precision machining of microstructure functional surface with sub-micrometer form accuracy and nanometer surface roughness for nonferrous material [37], Zhao et al. [38] presented a digital twin-driven cyber-physical system for contextual-aware controlling of the micro-punching system based on the high-precision online detection system (Figure 7). Digital twin defines the performance metrics to support online optimizing and provides context-aware adaptability to change. After implementing the digital twin approach, the diameter error of the micro-dots decreased from 2.226 μm to 0.396 μm.
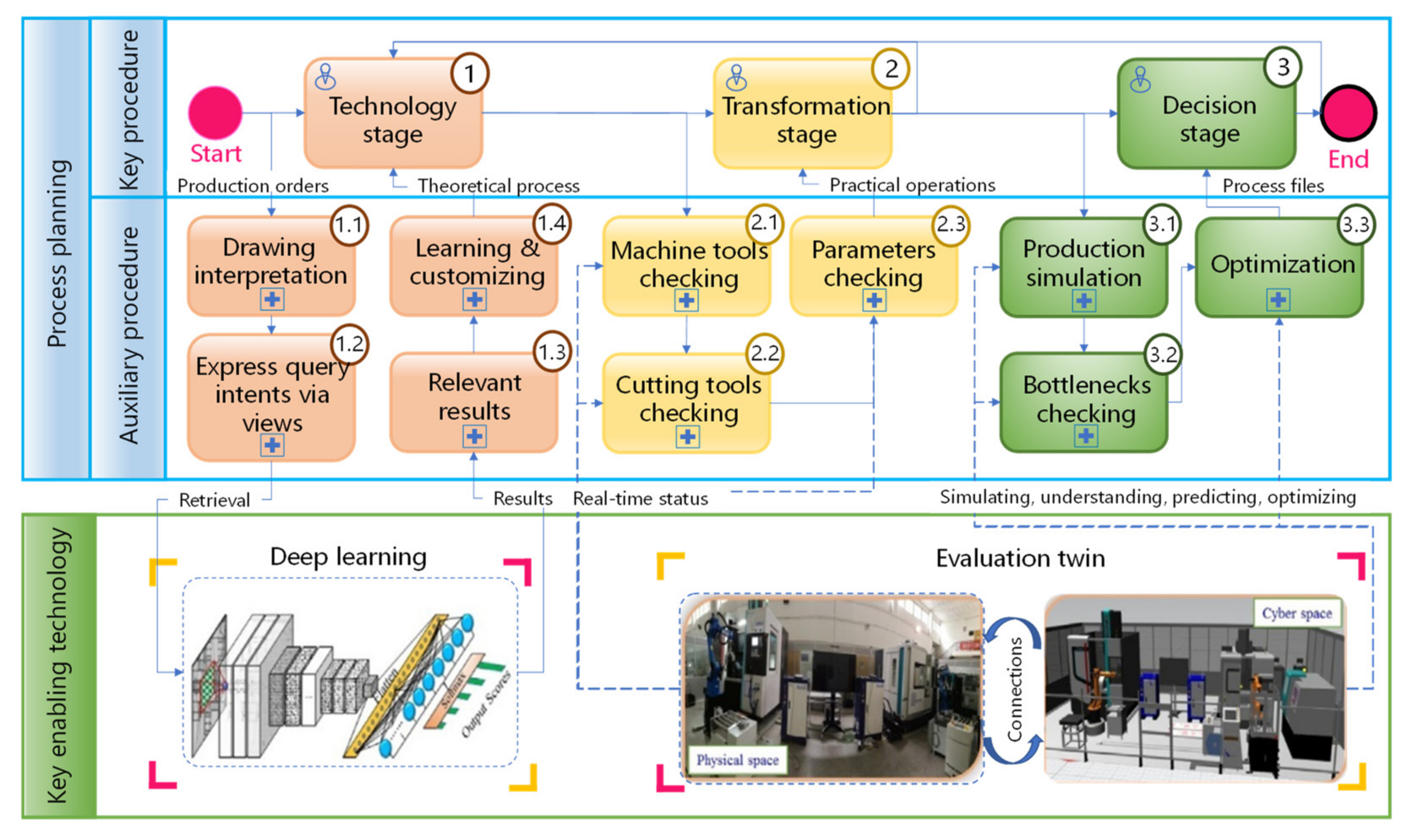
Zhang et al. [39] proposed a deep learning-enabled smart process planning approach towards a digital twin manufacturing cell (Figure 8). They defined the digital twin manufacturing cell (DTMC) as an integrated multi-physics, multiscale, probabilistic simulation model of a manufacturing cell which can intelligently perceive, simulate, understand, predict, optimize, and control to maximize the part quality and throughput, while maintaining flexibility and reducing cost. The embedded deep residual network-based process knowledge reuse network can understand the design intents expressed in a CAD drawing, and automatically extract knowledge for rapidly generating reference process models. An evaluation twin is built to generate an optimal process plan by combining the twin data with the reference process models. The case study showed that the cyberspace could help planners visually understand and predict manufacturing performance to select an optimal process plan with a trade-off of manufacturing capacity, time, and cost.
Apparently, employing finite element method simulation for exhaustive searching for the holistic optimum of tolerancing in process planning is both costly in computing time and infeasible in the digital twin model [40]. Tabar et al. [25] introduced a rule-based model to initiate the genetic algorithm for spot weld sequencing in three automotive sheet metal assemblies for further evaluation, which could be used in enabling the digital twins. Nevertheless, it is still challenging to build computational efficient algorithms for the digital twins-based process planning model, as the parameters and their relationships involved are complicated.
5.3. Digital Twins-Based Process Monitoring
The measuring apparatus performs the measurement and subsequent machine compensation in UPM [41]. Many optical/sound/radioactive measurement approaches have been proposed for monitoring tool wear and guiding the errors compensation and predictive maintenance in UPM as slight wear will deteriorate surface roughness [42]. The methods of process monitoring varied widely, including visual inspection, thermal imaging, ultrasonic analysis, vibration analysis, power consumption, and acoustic emission. Some methods require the installation of intricate sensor systems, which suffer from the high possibilities of damage to the UPM system. Practice is swaying towards adopting remote monitoring strategies to avoid installing the monitoring sensors on the UPM equipment, therefore minimizing the potential damage to the UPM system [43].
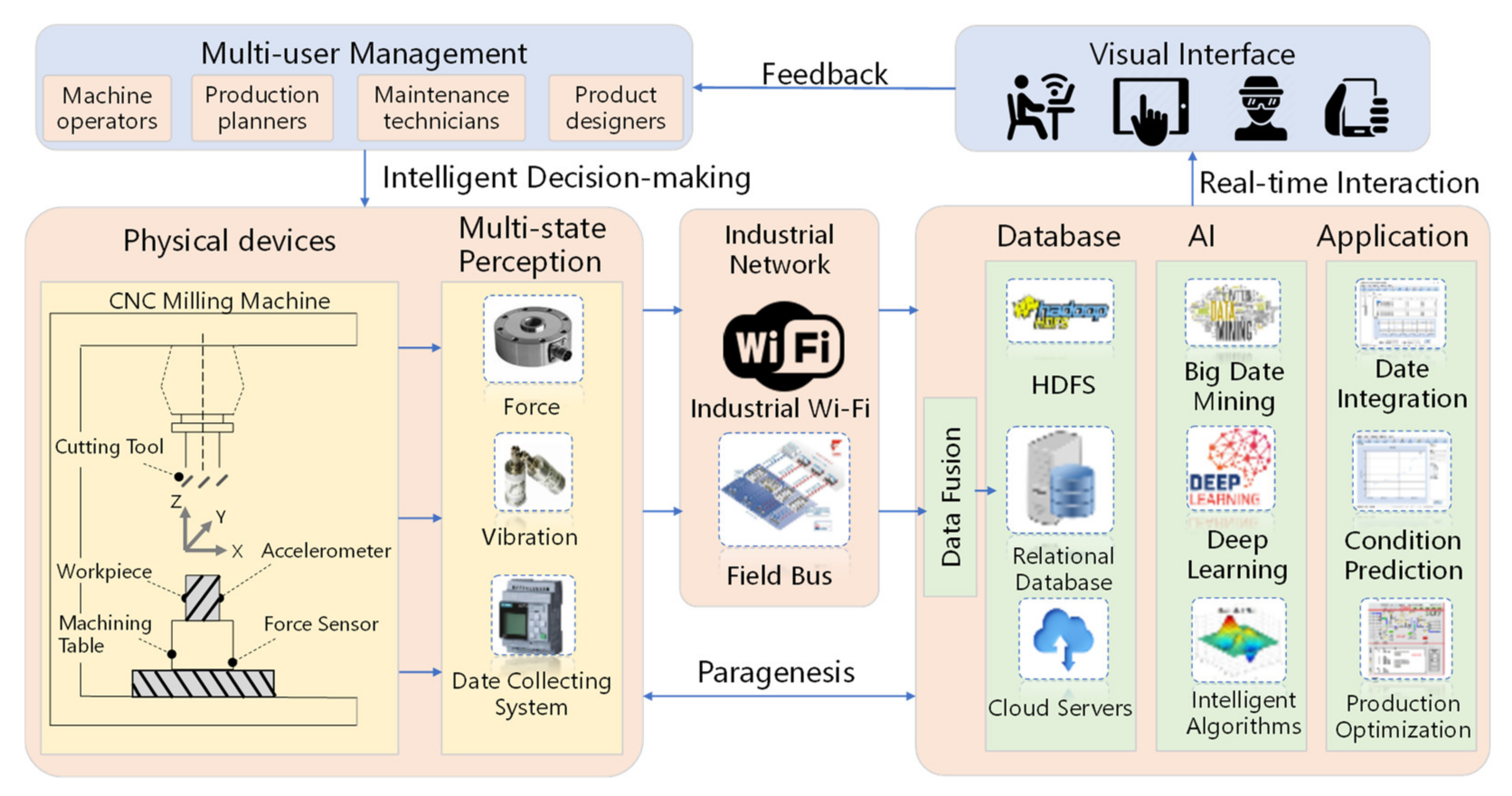
Digital twins provide new perspectives for process monitoring and prediction of UPM and enabling the influence evaluation of working conditions on the tool and the decision support of the process adjustment. Liu et al. [44] proposed a digital twin-based machining process evaluation method to improve product quality under the dynamic changing of the machining status. Zhu et al. [28] presented a digital twin-based thin-walled part manufacturing solution to deal with the workpiece changes and to make the set-up activities more rapid and accurate. Banerjee et al. [30] formalized a semantic knowledge model as a digital twin model by integrating the perceiving data, enhancing the reasoning efficiency in process management. Qiao et al. [27] presented a data-driven five-dimensional digital twin model that emphasizes the role of big data analytics in model development, together with a deep learning-based hybrid prediction model for enhancing the process monitoring and evaluation of machining tools (Figure 9). They defined the digital twin as a unique living model of the physical system with the support of enabling technologies including multi-physics simulation, machine learning, AR/VR, and cloud service. Digital twin contributes to the tool system model, motion, and fault visibility, and can accurately determine whether the feed system or the tool has a failure. Experiments showed that the proposed model can improve the prediction accuracy and robustness in tool wear prediction.
Environmental factors have a great influence on UPM. Environmental heat source, coolant delivery, extra vibrations, and electrical noises will deteriorate the performance in surface generation in the UPM [4]. To prevent the impact of environmental vibration and small changes in machine posture, vibration isolation and automatic level-adjustment mechanism should be installed on UPM equipment. The influence of temperature on machining accuracy is prominent in large-size machine tools and workpieces. Under the same machining velocity, the machining cycle of the large workpiece is longer compared to the small workpiece. In particular, large-scale UPM equipment is extremely demanding for environmental control, including high stability ground vibration control, liquid temperature control, environmental airflow control, and temperature control. In addition, the sound field and any factors that may cause small disturbances to the state of the UPM equipment should be strictly controlled. Shah et al. [45] presented a digital twin-based portable table-top sized temperature-controlled system using a Robotic Process Automation (RPA) tool (Figure 10). They defined that a digital twin framework effortlessly allows for data communication and integration between a physical system and a digital system in either direction to help in the recognition of unexpected upcoming failures. Data captured from the physical equipment were compared with the mathematical model, and then possible failures in the physical equipment were analyzed, predicted, and prevented.
In the future, digital twins-based process monitoring and more data-driven artificial intelligence algorithms and knowledge could be integrated into the digital twin system to enhance the prediction accuracy for fault diagnosis and performance degradation prognosis in UPM.
5.4. Digital Twins-Based Vibration Control
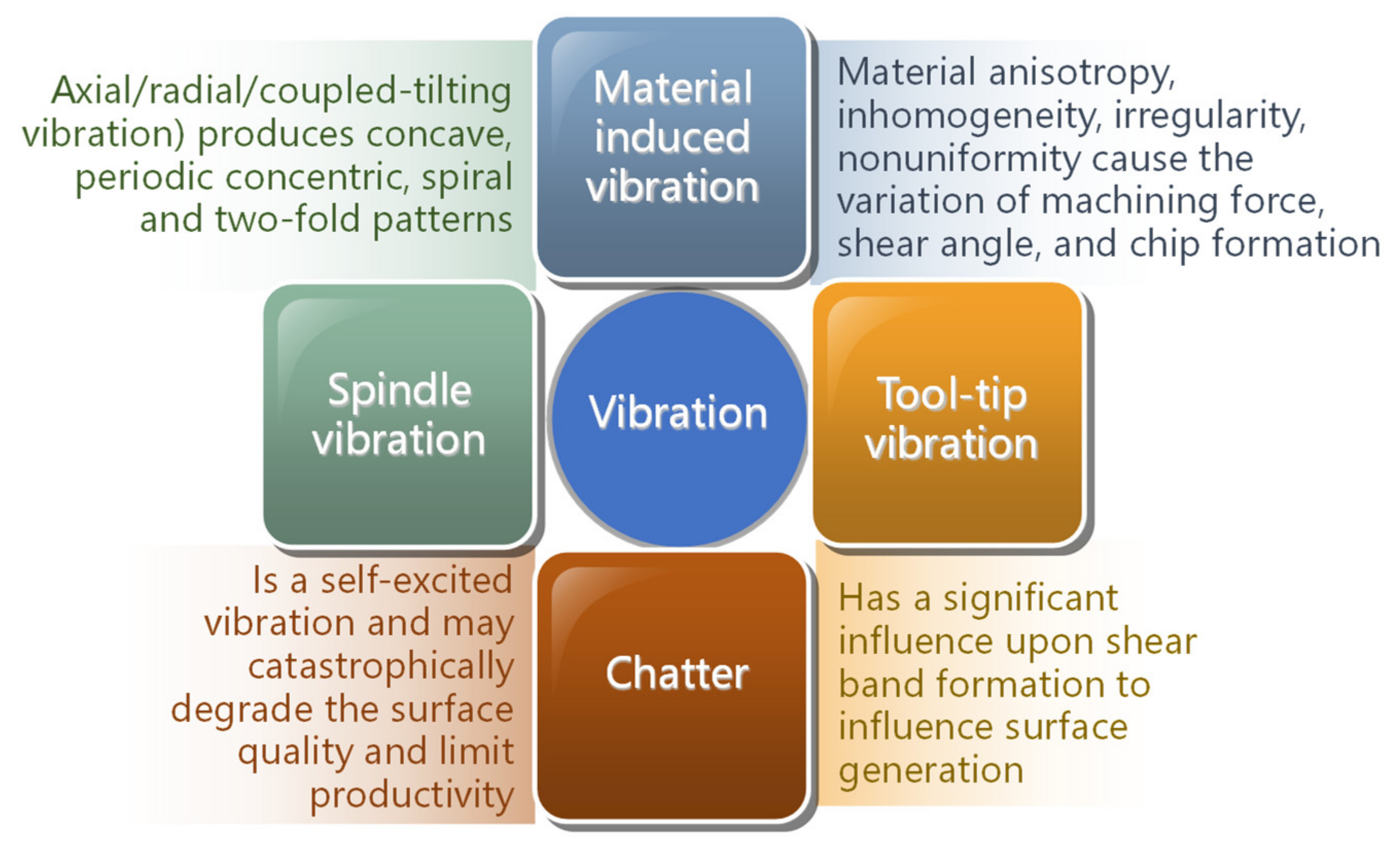
The high certainty of the UPM equipment depends on the control performance. Even a small amplitude vibration between the tool and workpiece-in-process will lead to a deterioration of the surface roughness. Based on the literature analysis, this paper categorized the vibration into material-induced vibration, tool-tip vibration, spindle vibration, and chatter (Figure 11). To control the vibration, the controller system is consequently required to have high-performance multi-axis real-time control and data processing capabilities.
The vibration control quality is often required to reach the limit of the contemporary technology, to name a few: (1) higher motion precision and controllable quality (e.g., friction or damping) of moving parts (e.g., rail or spindle); (2) high resolution, measuring accuracy, and stability of coordinate measuring system; and (3) processing trajectory tracking and positioning precision of movement servo control system. Moreover, the high rigidity, high stability, and excellent vibration damping of the UPM equipment body are critical. The influence of vibration isolation and horizontal attitude control on UPM is obvious. The isolation of machine tool vibration requires special foundation treatment and composite measures such as air-floating vibration isolation. The air-floating vibration isolation system uses an active air cushion with position control. The air floating vibration isolation system of the machine tool body also could automatically level itself to prevent the influence of the change of horizontal state on the processing of the machine tool. Countermeasures, such as the use of pulsation filter device, should also be taken for the machine tool hydraulic source and cooling water pulsation. For instance, Aslan [46] presented a digital twin system of a five-axis CNC machining center. The machining status (e.g., cutting forces, deformation, and vibration) is obtained from the feed drive motor current command measurements based on the compensation of friction, the inertia of each drive, and disturbance of structural dynamics through Kalman filters, used to auto-tune the cyber model and to realize adaptive controlling.
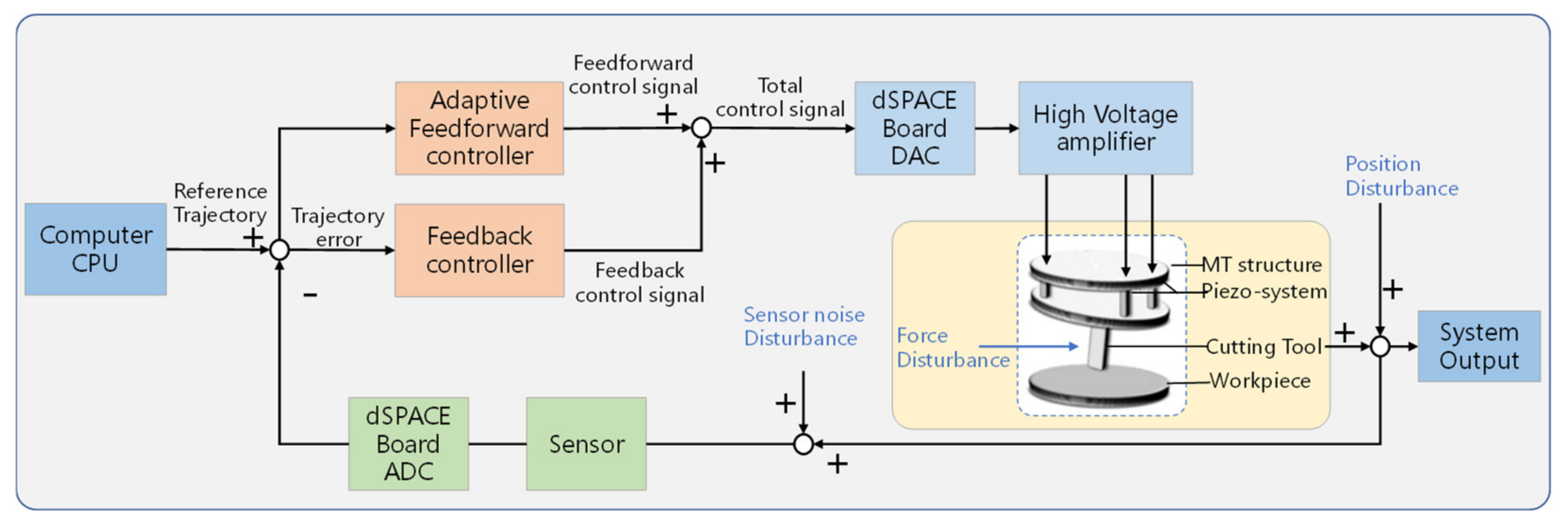
Simulating and analyzing these vibrations call for multi-physics modeling techniques as well as real-time controlling. Aggogeri et al. [31] presented a combined feedback–feedforward adaptive regulator, which uses a dynamic frequency observer with an updating amplitude–frequency–phase algorithm to an active vibration control tool holder platform to stabilize the vibrations in a milling machine tool. Figure 12 illustrates the designed controller architecture as a multiple-input multiple-output system for counteracting the passive vibrations due to periodic forces in the UPM equipment. Containing the cutting tool position online could be recognized as a digital twin, which can counteract vibrations with a maximum decrement of the vibration amplitude by 43.7% in the broadband frequency range (100 Hz–900 Hz).
In the digital twins-based vibration control, it is still challenging to identify, model, and analyze the non-linear influence factors affecting the dynamic machining process, control, and drive system on surface topography generation, e.g., the frequency ratio between the vibration frequency and spindle speed [4].
5.5. Digital Twins-Based Quality Prediction
Product quality such as surface roughness determines its corrosion resistance, wear resistance, and contact stiffness of the ground components. The geometrical accuracy of the workpiece-in-process is an important aspect of the quality control of the product. Accurate prediction of the geometric deviations in UPM is critical. As shown in Figure 13, the general parameters factors for attaining a high surface quality and surface roughness formation in UPM are general influencing surface generation which covers the machine tools, cutting mechanism, machining parameters/conditions, tool geometry, material property, chip formation, tool wear, environmental conditions, and heat deformation. For instance, although the depth of cut is in a quasi-linear proportion with cutting force, it leads to heat/elastic-plastic deformation and/or vibration, and consequently affects the surface roughness [4]. Surface topography is identified as a signature of (1) transactions of cutting tool profile with respect to workpiece-in-process, (2) relativity between the cutting tool and workpiece-in-process, (3) material swelling, deformation, removal, pile-up, crack, and separation mechanism, and (4) surface wrinkle, fracture, defect, and dimple mechanism [4].
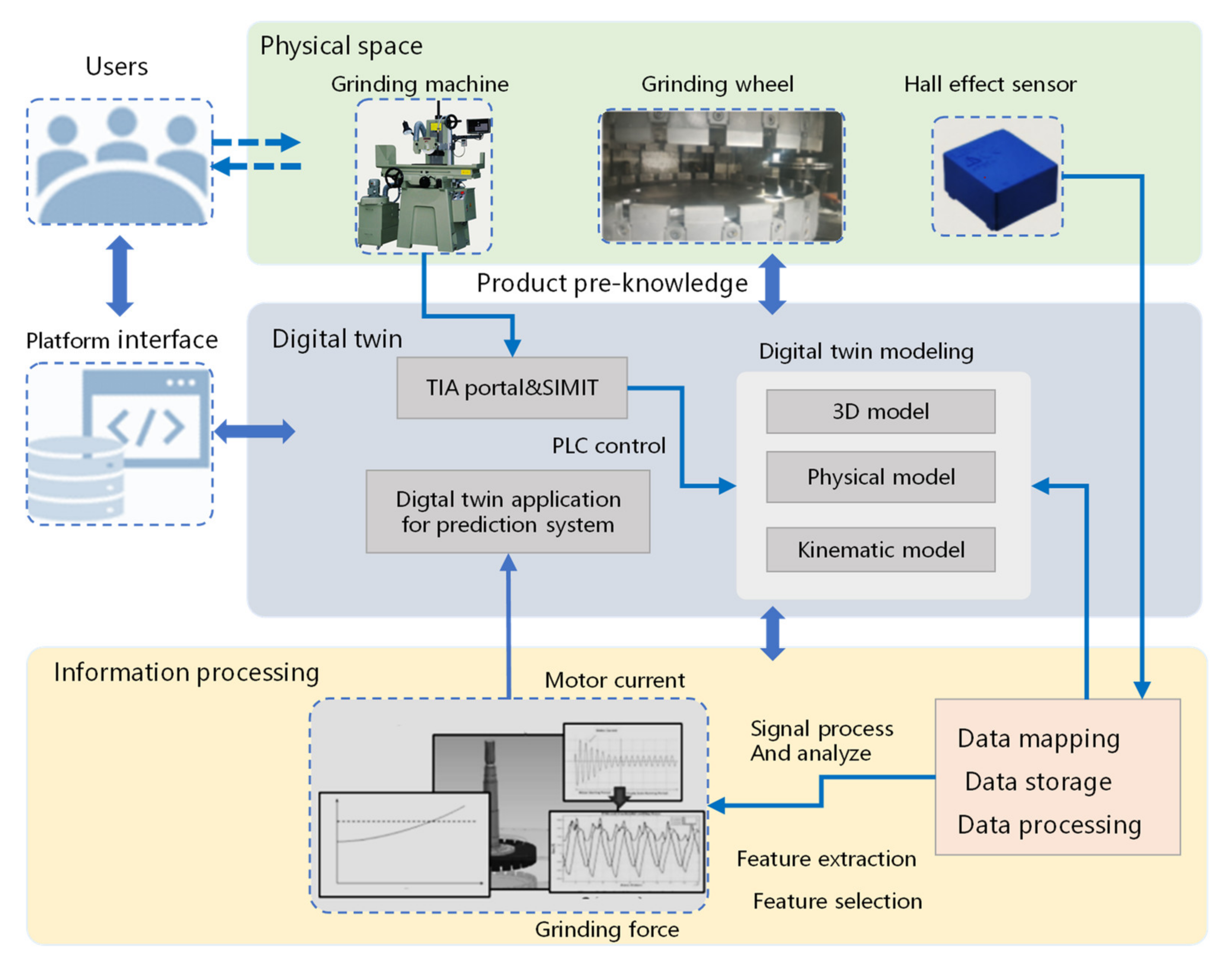
A digital twin is a new simulation model for predicting and monitoring machining forces that could emulate the influence of machining conditions on product quality. Zhu et al. [35] modeled the relations among model coefficients and involved parts and machining parameters to achieve the layer-level out-of-plane deviation on workpieces machined by the selective laser melting equipment. Chen et al. [47] proposed a digital twin-based straightening quality control method for slender rod straightening. Li et al. [32] presented a three-layer process-workpiece-centric knowledge schema framework for predicting the machining quality of multiple products. Pan et al. [33] discussed artificial intelligence-based to ground surface roughness prediction for evaluating the efficiency of the grinding process and guiding the feedback control of the grinding parameters in real-time to reduce the cost of production. Qi et al. [34] developed a digital twin approach that integrating the information captured from sensor data, physic models, and operation of the system for grinding force prediction in the vertical double side grinding machine (Figure 14). A grinding force digital twin model is established to predict the grinding wheel’s end of life and thereby deliver related information to end-users via the platform. In the digital twins-based forces prediction, the data-driven exact modeling and quantification of the model form uncertainties are challenging.
In the research of digital twins-based quality prediction, as the parameters together their relations affecting product quality in UPM are complicated, the latest knowledge graph technologies could be integrated with deep learning algorithms for complex reasoning and discovering more hidden relationships of various products with the same manufacturing features but different manufacturing technologies.
6. Key Enabling Techniques and Research Directions
6.1. Multiphysics Surface Generation Modeling
The physical surface generation model in UPM calls for in-depth and in-width knowledge of inherent physical law and mechanisms for material removal. As shown in Figure 12, general factors influencing surface generation include the machine tools, cutting mechanism, machining parameters/conditions, tool geometry, material property, chip formation, tool wear, environmental conditions, and heat deformation. There exist complicated relationships among these factors. The advanced surface generation modeling method is now evolving from the geometric dimension, dynamics dimension to an integrated manner.
The digital twin technology is capable of modeling, monitoring, and controlling the manufacturing process based on a fusion of multi-dimensional contextual manufacturing data, such as geometry deviations, material properties, and working conditions. Liu et al. [48] proposed a biomimicry principle-based multi-physics modeling method that could develop a digital twin of the manufacturing process, which includes multiple sub-models such as a geometry sub-model, behavior sub-model, and process sub-model that can interact with one another. Shao et al. [49] discussed the multiscale multiphysics-based modeling and simulations with the application to precision machining of aerofoil structures. Alsigar et al. [50] dedicated the analytical solutions for identifying the reasons for the inefficiency and productivity limitations of grinding machines. Armendia et al. [51] summarized how to evaluate the twin-control modeling feature to accurately assist the estimation of machining process performance.
However, there is a lack of efficient and systematic multiphysics surface generation modeling methods which could be used to build multi-scale, high-fidelity, and multi-dimensional digital twins of UPM [48], as the inherent physical law and mechanisms in material removal are still in their infancy, without in-depth and in-width knowledge, or not be completely comprehended. In particular, the multi-mode multi-degree vibrations, together with their effects on surface generation, have not been sufficiently comprehended. Therefore, more studies are supposed to be conducted in identifying the dynamic features of UPM and its influences on surface roughness with depth. Along with rapid development in computing and sensing technology, the multiphysics surface generation modeling could be further improved to a certain extent.
6.2. Advanced Perception and Measurement
In the context of Industry 4.0, scholars usually paid more attention to the cyber domain, whereas the physical domain has attracted lesser attention [52]. The physical domain comprises machining equipment, workpiece material, cutting tools, machining medium, automation drivers, sensors, and connectivity mechanisms [53]. Perception and monitoring is a significant requirement for dealing with phenomena and underlying mechanisms that are very complex and highly interacting in UPM [54].
The early coordinate measuring system in UPM uses the laser interferometry method. Laser interferometry is a kind of high precision geometric measurement datum, but it is easily affected by environmental factors (e.g., pressure, humidity, temperature, or airflow disturbance). These factors are easy to affect the tool control, thus affecting the workpiece surface processing quality. Vacuum isolation and zero temperature coefficient of coordinate measuring frame technology are used in some coordinate laser measuring loops. A diffraction grating is used in most of the coordinate measuring systems of UPM. The grating measuring system has high stability and the resolution can reach nanometer level. Recently, advances in digital miniature sensors and high-speed data acquisition technologies provide a probability for developing and implementing effective, high precision, high resolution, high stability, online, and non-intrusive monitoring applications for a wide scope of UPM processes [55]. Efficient digital twin-based vibration measurement should be realized to guide the use of active vibrations for improving surface generation affected by passive vibrations in UPM. However, the online measurement method for identifying and distinguishing different vibrations has not been completely studied [56].
UPM is different from general machining. To reduce the installation error introduced by the workpiece relocation, or to solve the problem of large size, complex surfaces without effective measuring instruments [57], UPM machine tools need to be equipped with a variety of optical and electronic measuring instruments. From the processing accuracy and efficiency, the controller of UPM needs to expand the machine measurement, tool, compensation, and many other auxiliary functions. Various architectures have been proposed to extract information logically. However, these architectures often rely on proprietary hardware, restricting flexibility and security for future changes and upgrades. On one hand, the security of machining instructions could be enhanced by introducing the blockchain system as a part of the digital twin [58,59]. On another hand, additional capabilities are needed to combine data collected from different sensing modalities. The UPM system should be designed to be reconfigurable for adding other individualized monitoring and control modules. Open architecture is a potential solution to collect, analyze, and communicate information of different sensing formats and sampling characteristics in a strategic manner [20]. The open architecture control system can not only make the UPM system achieve high performance of multi-axis control, but also obtain high function extensibility. However, the open architecture of sensing and measurement in UPM has not been sufficiently investigated.
6.3. Data Analytics for Sustainable and Self-Optimizing UPM
The new generation of UPM equipment is supposed to be digitalized and intelligent. Real-time perceiving, comprehending, and controlling processes are integral to optimizing the UPM strategies [14]. Digital twin-based intelligent UPM equipment provides a solid foundation for realizing smart manufacturing [60]. Artificial intelligence reveals opportunities in UPM machine tools. For instance, Tong et al. [60] used the MTConnect protocol to develop a real-time machining digital twin data service for optimizing manufacture, e.g., machining dynamics, contour error estimation, and parameters compensation. Ladj et al. [44] proposed a new blueprint of digital shadow to support decision management and data analytics. Knowledge-based behavior models are persistently enriched by unsupervised learning and knowledge inference engine to improve the contextual digital shadow of the physical equipment throughout its operational stages. Hu [61] proposed a cloud-based digital twins concept in the cloud manufacturing context to help reduce computing resources in the processing center and guarantee the fastest speed of the interactions between the human users and physical machines.
UPM industries enable to utilize advanced computing and employ IoT technologies to promote UPM toward self-optimizing and sustainability [62]. Self-optimizing machining systems [63] are described that can dynamically adapt the control parameters for optimizing quality, productivity, and efficiency in UPM. In this context, advanced control algorithms such as adaptive control, second-order dynamic no-difference control, high-performance multi-axis motion controller, and ultra-precision environmental control technology are in great need. However, the lack of appropriate data analytics and the requirements for efficiency pose significant challenges in the effectiveness of artificial intelligence systems in UPM environments [64].
7. Concluding Remarks
This paper surveyed the critical issues of incorporating digital twins into UPM design and control. The research progress of digital twins-based UPM design and control are analyzed. The digital twins-based UPM design, including bearings module design, spindle-drive module design, stage system module design, servo module design, and clamping module design, are reviewed. The digital twins-based UPM control studies, including voxel modeling, process planning, process monitoring, vibration control, and quality prediction, are reviewed. Although a lot of breakthroughs have been achieved in these design and control aspects, many issues and limitations of DTs for UPM still need to be consistently researched. The major barrier that impedes the establishment of the high-fidelity digital twin of UPM is a lack of efficient and systematic multiphysics surface generation modeling methods and the online measurement methods for identifying and distinguishing different vibrations, as well as the lack of appropriate data analytics and the requirements for computation efficiency. Other industrial fields of digital twins research, such as manufacturing system design [5], showed that the digital twin model could organically map and coordinate the function, structure, behavior, control, intelligence, and performance dimension of the system. This kind of mapping and interaction is a potentially missed opportunity for current DT-UPM research. The key enabling technologies and future research directions in engineering the digital twins-based UPM design and control are presented to shed new light on concerns in inventing new advanced UPM in the Industry 4.0 era.
Author Contributions
Conceptualization, L.W. and B.J.; methodology, J.L.; investigation, J.L.; resources, L.W.; writing—original draft preparation, J.L.; writing—review and editing, L.W.; supervision, B.J.; and funding acquisition, J.L. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Natural Science Foundation of China under Grant Nos. 52035013 and U1709206, the Science Fund for Creative Research Groups of National Natural Science Foundation of China under Grant No. 51821093; the Science and Technology Planning Project of Guangdong Province of China under Grant No. 2019B090916002.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zhang, S.; Zhou, Y.; Zhang, H.; Xiong, Z.; To, S. Advances in ultra-precision machining of micro-structured functional surfaces and their typical applications. Int. J. Mach. Tool Manu. 2019, 142, 16–41. [Google Scholar] [CrossRef]
- Kao, Y.; Liu, Y.; Wei, C.; Hsieh, S.; Yu, C. Application of a Cyber-Physical System and Machine-to-Machine Communication for Metal Processes; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Leng, J.; Zhang, H.; Yan, D.; Liu, Q.; Chen, X.; Zhang, D. Digital twin-driven manufacturing cyber-physical system for parallel controlling of smart workshop. J. Amb. Intel. Hum. Comp. 2019, 10, 1155–1166. [Google Scholar] [CrossRef]
- Zhang, S.J.; To, S.; Wang, S.J.; Zhu, Z.W. A review of surface roughness generation in ultra-precision machining. Int. J. Mach. Tool Manu. 2015, 91, 76–95. [Google Scholar] [CrossRef]
- Leng, J.; Wang, D.; Shen, W.; Li, X.; Liu, Q.; Chen, X. Digital twins-based smart manufacturing system design in Industry 4.0: A review. J. Manuf. Syst. 2021, 60, 119–137. [Google Scholar] [CrossRef]
- Leng, J.; Liu, Q.; Ye, S.; Jing, J.; Wang, Y.; Zhang, C.; Zhang, D.; Chen, X. Digital twin-driven rapid reconfiguration of the automated manufacturing system via an open architecture model. Robot. Cim.-Int. Manuf. 2020, 63, 101895. [Google Scholar] [CrossRef]
- Liu, Q.; Leng, J.; Yan, D.; Zhang, D.; Wei, L.; Yu, A.; Zhao, R.; Zhang, H.; Chen, X. Digital twin-based designing of the configuration, motion, control, and optimization model of a flow-type smart manufacturing system. J. Manuf. Syst. 2021, 58, 52–64. [Google Scholar] [CrossRef]
- Liu, Q.; Zhang, H.; Leng, J.; Chen, X. Digital twin-driven rapid individualised designing of automated flow-shop manufacturing system. Int. J. Prod. Res. 2019, 57, 3903–3919. [Google Scholar] [CrossRef]
- Gou, N.; Cheng, K.; Huo, D. Multiscale Modelling and Analysis for Design and Development of a High-Precision Aerostatic Bearing Slideway and Its Digital Twin. Machines 2021, 9, 85. [Google Scholar] [CrossRef]
- Liu, J.; Wu, Y.; Fan, L.; Si, Z.; Jia, Z. Current Hysteresis Control. Design of Motorized Spindle Driven System Based on Semi-Physical Simulation Model; IEEE: Piscataway, NJ, USA, 2020; pp. 1110–1115. [Google Scholar]
- Chen, X.; Chen, X.; Bai, W.; Guo, Z. Event-Triggered Optimal Control for Macro-Micro Composite Stage System via Single-Network ADP Method. IEEE Trans. Ind. Electron. 2021, 68, 4190–4198. [Google Scholar] [CrossRef]
- Tang, H.; Li, H.; To, S.; Yu, K.; He, Y.; Gao, J.; Chen, X.; Li, J. Design and control of a new 3-PUU fast tool servo for complex microstructure machining. Int. J. Adv. Manuf. Tech. 2018, 94, 3503–3517. [Google Scholar] [CrossRef]
- Liu, J.; Du, X.; Zhou, H.; Liu, X.; Ei Li, L.; Feng, F. A digital twin-based approach for dynamic clamping and positioning of the flexible tooling system. Procedia CIRP 2019, 80, 746–749. [Google Scholar] [CrossRef]
- Denkena, B.; Abele, E.; Brecher, C.; Dittrich, M.; Kara, S.; Mori, M. Energy efficient machine tools. CIRP Ann.-Manuf. Technol. 2020, 69, 646–667. [Google Scholar] [CrossRef]
- Kang, Y.; Rong, Y.; Yang, J.A. Geometric and kinetic model based computer-aided fixture design verification. J. Comput. Inf. Sci. Eng. 2003, 3, 187–199. [Google Scholar] [CrossRef]
- Leng, J.; Zhou, M.; Xiao, Y.; Zhang, H.; Liu, Q.; Shen, W.; Su, Q.; Li, L. Digital Twins-based Remote Semi-Physical Commissioning of Flow-Type Smart Manufacturing Systems. J. Clean. Prod. 2021, 306, 127278. [Google Scholar] [CrossRef]
- Matsubara, A.; Ibaraki, S. Monitoring and Control of Cutting Forces in Machining Processes: A Review. Int. J. Autom. Technol. 2009, 3, 445–456. [Google Scholar] [CrossRef]
- Collins, J.S. Digital Twin Volume Registration for Voxel-Based Closed-Loop Machining Systems. Master’s Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2018. [Google Scholar]
- Collins, J.S.; Tucker, T.; Kurfess, T. Intensity-Based Registration with Voxel-Based Computer-Aided Manufacturing for Adaptive Machining. J. Manuf. Sci. Eng. 2019, 141, 111005. [Google Scholar] [CrossRef]
- Saleeby, K.S. Multi-Agent Open Architecture for Process Monitoring and Part Certification. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2021. [Google Scholar]
- Feldhausen, T.; Saleeby, K.; Kurfess, T. Spinning the Digital Thread with Hybrid Manufacturing. Manuf. Lett. 2021, 29, 15–18. [Google Scholar] [CrossRef]
- Hao, X.; Li, Y.; Cheng, Y.; Liu, C.; Xu, K.; Tang, K. A time-varying geometry modeling method for parts with deformation during machining process. J. Manuf. Syst. 2020, 55, 15–29. [Google Scholar] [CrossRef]
- Dhanda, M.; Kukreja, A.; Pande, S.S. Region-Based Efficient Computer Numerical Control Machining Using Point Cloud Data. J. Comput. Inf. Sci. Eng. 2021, 21, 41005. [Google Scholar] [CrossRef]
- Lin, C.; Lin, C.; Wang, S. Using Fuzzy Control for Feed Rate Scheduling of Computer Numerical Control Machine Tools. Appl. Sci. 2021, 11, 4701. [Google Scholar] [CrossRef]
- Tabar, R.S.; Wärmefjord, K.; Söderberg, R.; Lindkvist, L. A Novel Rule-Based Method for Individualized Spot Welding Sequence Optimization With Respect to Geometrical Quality. J. Manuf. Sci. Eng. 2019, 141, 111013. [Google Scholar] [CrossRef]
- Tanaka, F. A Digital Twin of Multi-Axis Machine Tool for Micro Process Planning. In Proceedings of the International Symposium on Flexible Automation, Virtual, 8–9 July 2020. [Google Scholar]
- Qiao, Q.; Wang, J.; Ye, L.; Gao, R.X. Digital Twin for Machining Tool Condition Prediction. Procedia CIRP 2019, 81, 1388–1393. [Google Scholar] [CrossRef]
- Zhu, Z.; Xi, X.; Xu, X.; Cai, Y. Digital Twin-driven machining process for thin-walled part manufacturing. J. Manuf. Syst. 2021, 59, 453–466. [Google Scholar] [CrossRef]
- Liu, J.; Zhou, H.; Liu, X.; Tian, G.; Wu, M.; Cao, L.; Wang, W. Dynamic Evaluation Method of Machining Process Planning Based on Digital Twin. IEEE Access 2019, 7, 19312–19323. [Google Scholar] [CrossRef]
- Banerjee, A.; Dalal, R.; Al, S.M.; Joshi, K.P. Generating digital twin models using knowledge graphs for industrial production lines. In Proceedings of the 9th International ACM Web Science Conference, Troy, NY, USA, 25 June 2017. [Google Scholar]
- Aggogeri, F.; Merlo, A.; Pellegrini, N. Active vibration control development in ultra-precision machining. J. Vib. Control. 2021, 27, 790–801. [Google Scholar] [CrossRef]
- Li, P.; Cheng, K.; Jiang, P.; Katchasuwanmanee, K. Investigation on industrial dataspace for advanced machining workshops: Enabling machining operations control with domain knowledge and application case studies. J. Intell. Manuf. 2020, 1–17. [Google Scholar] [CrossRef]
- Pan, Y.; Zhou, P.; Yan, Y.; Agrawal, A.; Wang, Y.; Guo, D.; Goel, S. New insights into the methods for predicting ground surface roughness in the age of digitalisation. Precis. Eng. 2021, 67, 393–418. [Google Scholar] [CrossRef]
- Qi, B.; Park, H. Data-driven digital twin model for predicting grinding force. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2020; Volume 916, p. 12092. [Google Scholar] [CrossRef]
- Zhu, Z.; Anwer, N.; Mathieu, L. Statistical modal analysis for out-of-plane deviation prediction in additive manufacturing based on finite element simulation. J. Manuf. Sci. Eng. 2019, 141, 111011. [Google Scholar] [CrossRef]
- Xin, Y.; Yang, S.; Wang, G.; Evans, R.; Wu, F. A tool path optimization approach based on blend feature simplification for multi-cavity machining of complex parts. Sci. Prog. 2020, 103, 399525447. [Google Scholar] [CrossRef] [Green Version]
- Zhao, R.; Wang, S.; Chen, X.; Yin, Z.; Leng, J.; Zhang, X. Development of a micro punching machine tool for micro lens array on steel mold. Int. J. Adv. Manuf. Tech. 2020, 106, 4307–4320. [Google Scholar] [CrossRef]
- Zhao, R.; Yan, D.; Liu, Q.; Leng, J.; Wan, J.; Chen, X.; Zhang, X. Digital Twin-Driven Cyber-Physical System for Autonomously Controlling of Micro Punching System. IEEE Access 2019, 7, 9459–9469. [Google Scholar] [CrossRef]
- Zhang, C.; Zhou, G.; Hu, J.; Li, J. Deep learning-enabled intelligent process planning for digital twin manufacturing cell. Knowl.-Based Syst. 2020, 191, 105247. [Google Scholar] [CrossRef]
- Leng, J.; Yan, D.; Liu, Q.; Xu, K.; Zhao, J.L.; Shi, R.; Wei, L.; Zhang, D.; Chen, X. ManuChain: Combining permissioned blockchain with a holistic optimization model as bi-level intelligence for smart manufacturing. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 182–192. [Google Scholar] [CrossRef]
- Marek, T.; Berthold, J.; Holub, M.; Regel, J. A quasi-online geometric errors compensation method on CNC machine tool. In Proceedings of the 18th International Conference on Mechatronics-Mechatronika, Brno, Czech Republic, 5–7 December 2018. [Google Scholar]
- Siddhpura, A.; Paurobally, R. A review of flank wear prediction methods for tool condition monitoring in a turning process. Int. J. Adv. Manuf. Tech. 2013, 65, 371–393. [Google Scholar] [CrossRef]
- Coady, J.; Toal, D.; Newe, T.; Dooly, G. Remote acoustic analysis for tool condition monitoring. Procedia Manuf. 2019, 38, 840–847. [Google Scholar] [CrossRef]
- Ladj, A.; Wang, Z.; Meski, O.; Belkadi, F.; Ritou, M.; Da Cunha, C. A knowledge-based Digital Shadow for machining industry in a Digital Twin perspective. J. Manuf. Syst. 2021, 58, 168–179. [Google Scholar] [CrossRef]
- Shah, K.; Prabhakar, T.V.; Sarweshkumar, C.R.; Abhishek, S.V. Construction of a Digital Twin Framework using Free and Open-Source Software Programs. IEEE Internet Comput. 2021, 1. [Google Scholar] [CrossRef]
- Aslan, D. Integration of Virtual and Online Machining Process Control and Monitoring Using CNC Drive Measurements. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 2019. [Google Scholar]
- Chen, X.; Yan, N.; Wang, C.; Ding, P. Study on straightening quality control for slender rod based on digital twin. J. Phys. Conf. Ser. 2020, 1633. [Google Scholar] [CrossRef]
- Liu, S.; Bao, J.; Lu, Y.; Li, J.; Lu, S.; Sun, X. Digital twin modeling method based on biomimicry for machining aerospace components. J. Manuf. Syst. 2021, 58, 180–195. [Google Scholar] [CrossRef]
- Shao, Y.; Adetoro, O.B.; Cheng, K. Development of multiscale multiphysics-based modelling and simulations with the application to precision machining of aerofoil structures. Eng. Comput. 2020, 38, 1330–1349. [Google Scholar] [CrossRef]
- Alsigar, M.; Pereverzev, P.; Almawash, A.; Alkadhim, M. An approach to complex model ECGA for the stable and unstable grinding conditions. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2020; p. 971. [Google Scholar] [CrossRef]
- Armendia, M.; Cugnon, F.; Berglind, L.; Ozturk, E.; Gil, G.; Selmi, J. Evaluation of Machine Tool Digital Twin for machining operations in industrial environment. Procedia CIRP 2019, 82, 231–236. [Google Scholar] [CrossRef]
- Ruppert, T.; Jaskó, S.; Holczinger, T.; Abonyi, J. Enabling Technologies for Operator 4.0: A Survey. Appl. Sci. 2018, 8, 1650. [Google Scholar] [CrossRef] [Green Version]
- Iqbal, A.; Zhao, G.; Suhaimi, H.; He, N.; Hussain, G.; Zhao, W. Readiness of subtractive and additive manufacturing and their sustainable amalgamation from the perspective of Industry 4.0: A comprehensive review. Int. J. Adv. Manuf. Technol. 2020, 111, 2475–2498. [Google Scholar] [CrossRef]
- Benardos, P.G.; Vosniakos, G.C. Internet of Things and Industrial Applications for Precision Machining. Solid State Phenom. 2017, 261, 440–447. [Google Scholar] [CrossRef]
- Goyal, D.; Mongia, C.; Sehgal, S. Applications of Digital Signal Processing in Monitoring Machining Processes and Rotary Components: A Review. IEEE Sens. J. 2021, 21, 8780–8804. [Google Scholar] [CrossRef]
- Zhang, S.J.; To, S.; Zhang, G.Q.; Zhu, Z.W. A review of machine-tool vibration and its influence upon surface generation in ultra-precision machining. Int. J. Mach. Tool Manu. 2015, 91, 34–42. [Google Scholar] [CrossRef]
- Martinova, L.I.; Martinov, G.M. Prospects for CNC Machine Tools. Russ. Eng. Res. 2019, 39, 1080–1083. [Google Scholar] [CrossRef]
- Leng, J.; Ye, S.; Zhou, M.; Zhao, J.L.; Liu, Q.; Guo, W.; Cao, W.; Fu, L. Blockchain-secured smart manufacturing in Industry 4.0: A survey. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 237–252. [Google Scholar] [CrossRef]
- Leng, J.; Ruan, G.; Jiang, P.; Xu, K.; Liu, Q.; Zhou, X.; Liu, C. Blockchain-empowered sustainable manufacturing and product lifecycle management in industry 4.0: A survey. Renew. Sustain. Energy Rev. 2020, 132, 110112. [Google Scholar] [CrossRef]
- Tong, X.; Liu, Q.; Pi, S.; Xiao, Y. Real-time machining data application and service based on IMT digital twin. J. Intell. Manuf. 2020, 31, 1113–1132. [Google Scholar] [CrossRef]
- Hu, L. Cyber-Physical Manufacturing Cloud: An Efficient Method of Building Digital Twin for 3D Printer by Adapting MTconnect Protocol. In ProQuest Dissertations & Theses: Ann Arbor; Missouri University of Science and Technology: Rolla, MO, USA, 2017. [Google Scholar]
- Yip, W.S.; To, S.; Zhou, H. Current status, challenges and opportunities of sustainable ultra-precision manufacturing. J. Intell. Manuf. 2021, 1–13. [Google Scholar] [CrossRef]
- Möhring, H.C.; Wiederkehr, P.; Erkorkmaz, K.; Kakinuma, Y. Self-optimizing machining systems. CIRP Ann. 2020, 69, 740–763. [Google Scholar] [CrossRef]
- Bousdekis, A.; Apostolou, D.; Mentzas, G. A human cyber physical system framework for operator 4.0–artificial intelligence symbiosis. Manuf. Lett. 2020, 25, 10–15. [Google Scholar] [CrossRef]
Figure 1.
Statistics of collected literature (up to 30 June 2021).

Figure 2.
An overview of typical UPM methods and machining error sources.

Figure 3.
A Function–Structure–Behavior–Control–Intelligence–Performance framework refined, based on ref. [5].
Figure 3.
A Function–Structure–Behavior–Control–Intelligence–Performance framework refined, based on ref. [5].

Figure 4.
Schematic of the aerostatic bearing slideway digital twin [9].
Figure 4.
Schematic of the aerostatic bearing slideway digital twin [9].

Figure 5.
A framework of digital twin-based flexible tooling system [13].
Figure 5.
A framework of digital twin-based flexible tooling system [13].

Figure 6.
Spinning the digital thread with hybrid manufacturing [21].
Figure 6.
Spinning the digital thread with hybrid manufacturing [21].

Figure 7.
A digital twin-driven cyber-physical system for micro-punching systems [38].
Figure 7.
A digital twin-driven cyber-physical system for micro-punching systems [38].

Figure 8.
A framework of digital twin-based intelligent process planning for manufacturing cells [39].
Figure 8.
A framework of digital twin-based intelligent process planning for manufacturing cells [39].

Figure 9.
Schematic diagram of the experimental setup for tool wear prediction [27].
Figure 9.
Schematic diagram of the experimental setup for tool wear prediction [27].

Figure 10.
A digital twin-based temperature-controlled system using Free and Open-Source Software Programs [45].
Figure 10.
A digital twin-based temperature-controlled system using Free and Open-Source Software Programs [45].

Figure 11.
Typical vibration categories in UPM.

Figure 12.
Active vibration control design controller in a milling machine tool [31].
Figure 12.
Active vibration control design controller in a milling machine tool [31].

Figure 13.
General factors influencing surface generation.

Figure 14.
Digital twin framework for grinding machine [34].
Figure 14.
Digital twin framework for grinding machine [34].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
An FSBCIP-based review of different modules design of UPM based on digital twins.
| Modules | Challenges | Metrics of Using Digital Twins Approach | Ref. |
|---|---|---|---|
| Bearing slideways | Obtain a trade-off among feed velocity, achievable precision and resulting friction force | Predict the performance of the designed bearing slideways in the operating process | [9] |
| Spindle-drive | Achieve a balance among the anti-vibration capability, torque/speed range, and cost | Timely and cost-economically verify its performance instead of destructive tests | [10] |
| Stage module | Capable of sub-micron/nanometer positioning resolution and/or accuracy | Optimize the adaptive control algorithm | [11] |
| Servo module | Suffer from a lag phenomenon in dynamic tracking of the tool path | Eliminate nonlinear factors including the friction effect of moving mechanism with nonlinear characteristics | [12] |
| Clamping module | Achieve a balance among locating tolerance, minimum clamping force, and fixturing accuracy and stability | Support real-time, geometry data-driven dynamic decision of the clamping forces and positioning | [13] |
Table 2.
An FSBCIP-based review of different aspects of UPM control based on digital twins.
| Dimensions | Challenges | Metrics of Using Digital Twins Approach | Ref. |
|---|---|---|---|
| Voxel modeling | Accurately capture and process the in situ spatial information from a controller | Improve the accuracy of voxel models of the workpiece-in-process | [18,19,20,21,22] |
| Process planning | Ensure the accuracy of positioning, tool path planning, and efficiency for blend features | Precise micro process planning for generating machining instructions | [23,24,25,26] |
| Process monitoring | High cost and high probability of damage to UPM system | Improve product quality under the dynamic change of the machining condition | [27,28,29,30] |
| Vibration control | Call for multi-physics modeling techniques as well as real-time controlling. | Counteract vibrations in real time | [4,31] |
| Quality control | The parameters together their complicated relations affecting product quality in UPM | Prediction while considering the influence of working conditions on product quality | [32,33,34,35] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Wu, L.; Leng, J.; Ju, B. Digital Twins-Based Smart Design and Control of Ultra-Precision Machining: A Review. Symmetry 2021, 13, 1717. https://doi.org/10.3390/sym13091717
AMA Style
Wu L, Leng J, Ju B. Digital Twins-Based Smart Design and Control of Ultra-Precision Machining: A Review. Symmetry. 2021; 13(9):1717. https://doi.org/10.3390/sym13091717
Chicago/Turabian StyleWu, Lei, Jiewu Leng, and Bingfeng Ju. 2021. "Digital Twins-Based Smart Design and Control of Ultra-Precision Machining: A Review" Symmetry 13, no. 9: 1717. https://doi.org/10.3390/sym13091717
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.