
Abstract
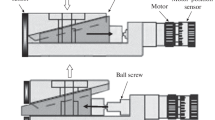
Vertical precision positioning is distinguished from positioning in horizontal plane due to the presence of gravitational forces that work differently in “lifting” and “lowering” modes. Vertical positioners also need a “locking mechanism” to avoid the unintentional lowering of the platform. We present a vertical precision positioner that works according to the “stick–slip” phenomenon. Using an adjustable offset coupling, the linear motion of a piezoelectric actuator is converted to the rotational motion of a low friction lead screw which results in the vertical motion of the screw. A microcontroller can adjust the grip, and hence the friction, between the coupling and the lead screw to ensure the uniformity of motion in lifting and lowering modes. The dynamic model of the mechanism is extracted, and simulations are performed to discover how the peak voltage and frequency of the saw-tooth signal affect the stick–slip motion of the mechanism. Additionally, equations are verified by comparing simulation results and experiments. They can be used in the control system design in future works.









Similar content being viewed by others


References
Mohammad, T., & Salisbury, S. P. (2014). Design and assessment of a Z-axis precision positioning stage with centimeter range based on a piezoworm motor. IEEE/ASME Transactions on Mechatronics, 20(5), 2021–2030.
Shimizu, N., et al. (1990). An ultrahigh vacuum scanning tunneling microscope with a new inchworm mechanism. Journal of Vacuum Science & Technology A: Vacuum, Surfaces, and Films, 8(1), 333–335.
Takahashi, M., Yoshioka, H., & Shinno, H. (2008). A newly developed long-stroke vertical nano-motion platform with gravity compensator. Journal of Advanced Mechanical Design, Systems, and Manufacturing, 2(3), 356–365.
Yong, Y., & Mohemani, S. R. (2012). Design of an inertially counterbalanced Z-nanopositioner for high-speed atomic force microscopy. IEEE Transactions on Nanotechnology, 12(2), 137–145.
Mohammad, T., & Salisbury, S. (2013). Towards design optimisation of a lifting platform for a piezoworm-driven high precision positioning stage. International Journal of Mechanisms and Robotic Systems, 1(4), 301–315.
Ishihara, S., et al. (1989). A vertical stepper for synchrotron x-ray lithography. Journal of Vacuum Science & Technology B: Microelectronics Processing and Phenomena, 7(6), 1652–1656.
Mohammad, T., & Salisbury, S. (2012). Design considerations for long travel Z-axis ultra-precision positioning stage. International Journal of Precision Engineering and Manufacturing, 13(9), 1581–1588.
Bracco, G., Gussoni, A., & Pagnini, L. C. (2010). Note: Design and test of a compact flexure z-stage for atomic force microscopy. Review of Scientific Instruments, 81(3), 036106.
Mohammad, T., & Salisbury, S. P. (2010). Design of a Novel Vertical Motion Piezoworm Positioner. Smart Materials, Adaptive Structures and Intelligent Systems, 44168, 379–398.
Zhu, X., et al. (2015). A novel flexure-based vertical nanopositioning stage with large travel range. Review of Scientific Instruments, 86(10), 105112.
Tsai, M. H., Cheng, C. N., & Shih, M. C. (2006). Design and control for the pneumatic cylinder precision positioning under vertical loading. In Proceedings of the 21st Annual ASPE Meeting (Vol. 1921).
Ha, J. L., Fung, R. F., Han, C. F., & Chang, J. R. (2006). Effects of frictional models on the dynamic response of the impact drive mechanism. ASME Journal of Vibration and Acoustics, 128(1), 88–96.
Ha, J.-L., Fung, R.-F., & Han, C.-F. (2005). Optimization of an impact drive mechanism based on real-coded genetic algorithm. Sensors and Actuators A: Physical, 121(2), 488–493.
Ha, J.-L., Fung, R.-F., & Yang, C.-S. (2005). Hysteresis identification and dynamic responses of the impact drive mechanism. Journal of Sound and Vibration, 283(3–5), 943–956.
Cheng, T., et al. (2017). Investigation on driving characteristics of a piezoelectric stick–slip actuator based on resonant/off-resonant hybrid excitation. Smart Materials and Structures, 26(3), 035042.
Tan, Y., et al. (2017). Large stroke and high precision positioning using iron–gallium alloy (Galfenol) based multi-DOF impact drive mechanism. Precision Engineering, 49, 401–411.
Guo, Z., et al. (2019). A novel stick-slip based linear actuator using bi-directional motion of micropositioner. Mechanical Systems and Signal Processing, 128, 37–49.
Tian, Y., Huo, Z., Wang, F., Shi, B., & Zhang, D. (2019). Design and Modeling of a Decoupled 2-DOF Stick-slip Positioning Stage. In 2019 IEEE International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale (3M-NANO) (pp. 211–215). IEEE.
Huang, W., & Sun, M. (2019). Design, Analysis, and Experiment on a Novel Stick-Slip Piezoelectric Actuator with a Lever Mechanism. Micromachines, 10(12), 863.
Zhou, M., et al. (2017). Design and experimental research of a novel stick-slip type piezoelectric actuator. Micromachines, 8(5), 150.
Zhong, B., et al. (2019). Improved inertial stick-slip movement performance via driving waveform optimization. Precision Engineering, 55, 260–267.
Cheng, T., et al. (2016). Performance improvement of smooth impact drive mechanism at low voltage utilizing ultrasonic friction reduction. Review of Scientific Instruments, 87(8), 085007.
Yang, C.-F., Jeng, S.-L., & Chieng, W.-H. (2011). Motion behavior of triangular waveform excitation input in an operating impact drive mechanism. Sensors and Actuators A: Physical, 166(1), 66–77.
Wang, S., et al. (2017). Design, analysis and experimental performance of a novel stick-slip type piezoelectric rotary actuator based on variable force couple driving. Smart Materials and Structures, 26(5), 055005.
Ali, A. (2021). Design and control of an XY precision positioning system using impact drive mechanism. Recent Patents on Mechanical Engineering, 14, 1–1.
Wang, Y., Xu, M., Shao, S., Song, S., & Shao, Y. (2020). A Novel Stick-Slip Type Rotary Piezoelectric Actuator. Advances in Materials Science and Engineering, 2020, 1–11.
Fung, R.-F., Han, C.-F., & Ha, J.-L. (2008). Dynamic responses of the impact drive mechanism modeled by the distributed parameter system. Applied mathematical modelling, 32(9), 1734–1743.
Bergander, A., Breguet, J. M., Schmitt, C., & Clavel, R. (2000, October). Micropositioners for microscopy applications based on the stick-slip effect. In MHS2000. Proceedings of 2000 International Symposium on Micromechatronics and Human Science (Cat. No. 00TH8530) (pp. 213–216). IEEE.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Abdi, A., Shariat Panahi, M., Hairi Yazdi, M.R. et al. Design and Implementation of a Novel Vertical Precision Positioner. Int. J. Precis. Eng. Manuf. 22, 1861–1872 (2021). https://doi.org/10.1007/s12541-021-00576-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-021-00576-0