
A Neural Network Technique for the Derivation of Runge–Kutta Pairs Adjusted for Scalar Autonomous Problems

 , and
, and
Abstract
:1. Introduction
- Introduction;
- Theory of Runge–Kutta Pairs of Orders 6(5);
- Training the coefficients;
- Numerical Tests;
- Conclusions.
2. Theory of Runge–Kutta Pairs of Orders 6(5)
- Solve , for .
- Put .
- Solve and for .
- Substitute from .
- Since find from
- is given from .
- Solve simultaneously for , , , and the equations:
- From evaluate and .
- From evaluate and .
- From evaluate and .
- From evaluate .
- Finally, using FSAL (First Stage As Last) property, substitute .
3. Training the Coefficients
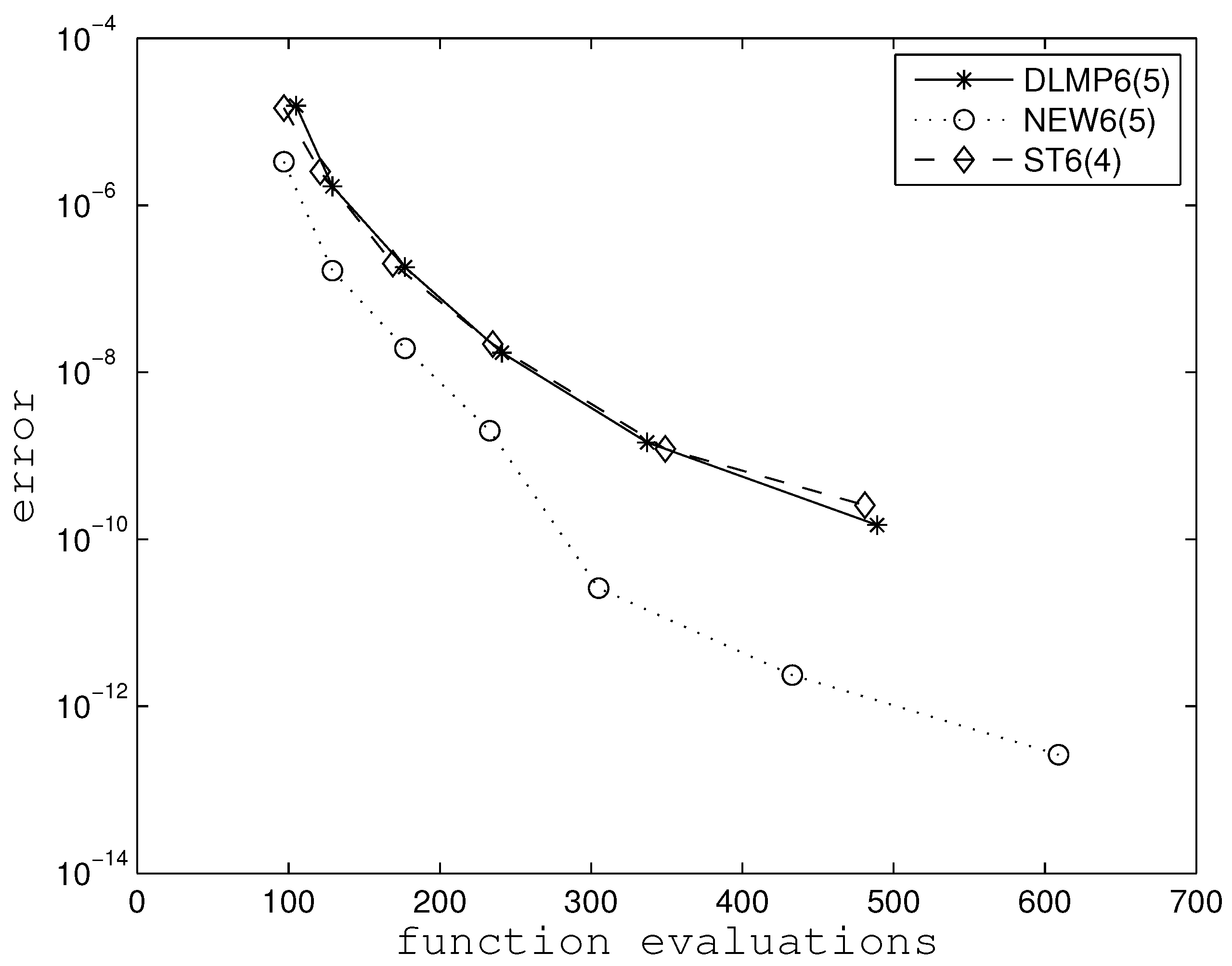
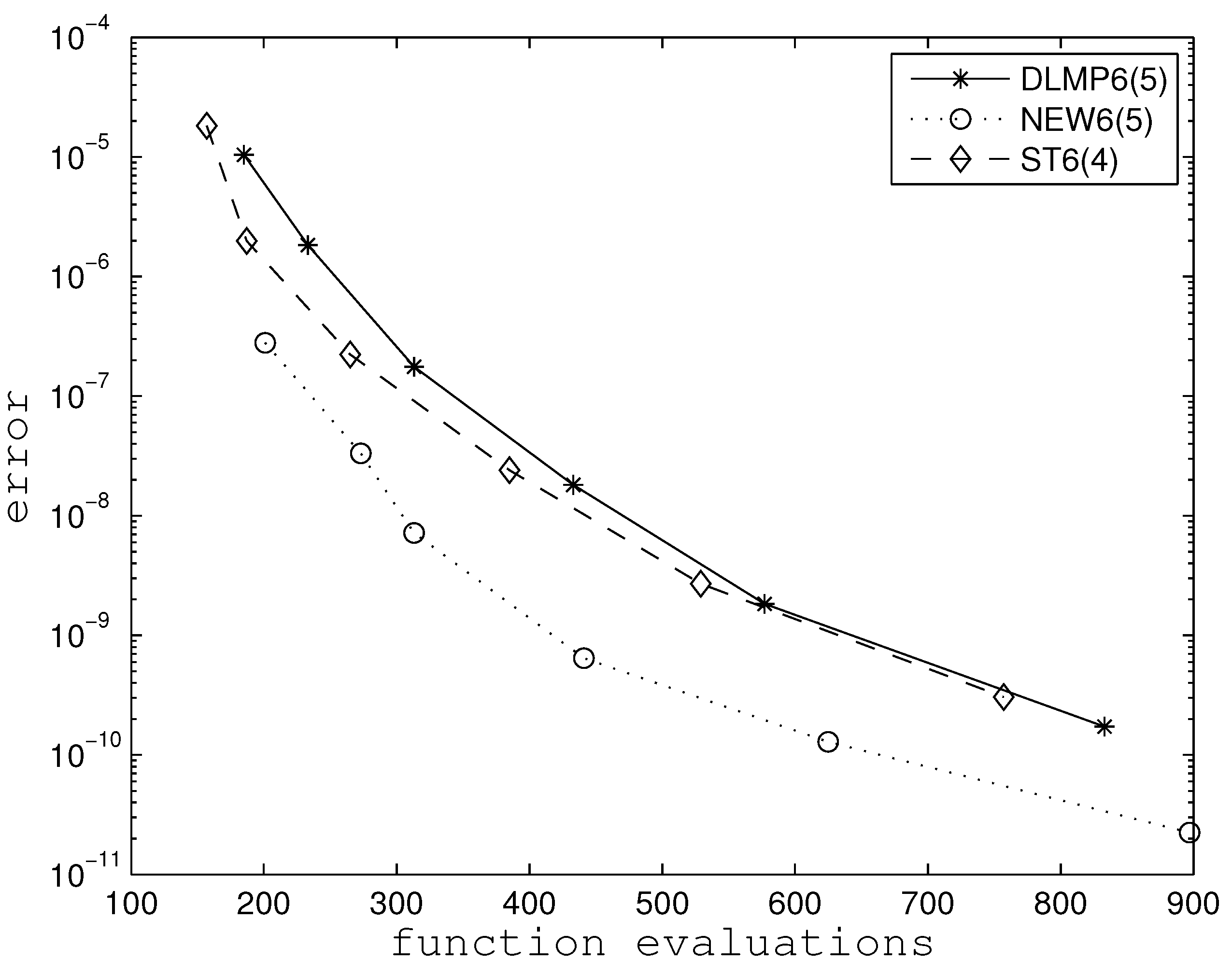
4. Numerical Tests
- DLMP6(5) 9-stages FSAL pair given in [19].
- ST6(4) 7-stages FSAL pair given in [24].
- NEW6(5) 9-stages FSAL presented here.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Butcher, J.C. On Runge–Kutta processes of high order. J. Austral. Math. Soc. 1964, 4, 179–194. [Google Scholar] [CrossRef] [Green Version]
- Butcher, J.C. Numerical Methods for Ordinary Differential Equations; John Wiley & Sons: Chichester, UK, 2003. [Google Scholar]
- Tsitouras, C.; Papakostas, S.N. Cheap Error Estimation for Runge–Kutta pairs. SIAM J. Sci. Comput. 1999, 20, 2067–2088. [Google Scholar] [CrossRef]
- Hairer, E.; Norsett, S.P.; Wanner, G. Solving Ordinary Differential Equations I, Nonstiff Problems; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]
- Runge, C. Ueber die numerische Auflöung von Differentialgleichungen. Math. Ann. 1895, 46, 167–178. [Google Scholar] [CrossRef] [Green Version]
- Kutta, W. Beitrag zur naherungsweisen Integration von Differentialgleichungen. Z. Math. Phys. 1901, 46, 435–453. [Google Scholar]
- Fehlberg, E. Klassische Runge–Kutta-Formeln fiinfter und siebenter 0rdnung mit Schrittweiten-Kontrolle. Computing 1969, 4, 93–106. [Google Scholar] [CrossRef]
- Fehlberg, E. Klassische Runge–Kutta-Formeln vierter und niedrigererrdnung mit Schrittweiten-Kontrolle und ihre Anwendung auf Warmeleitungsprobleme. Computing 1970, 6, 61–71. [Google Scholar] [CrossRef]
- Dormand, J.R.; Prince, P.J. A family of embedded Runge–Kutta formulae. J. Comput. Appl. Math. 1980, 6, 19–26. [Google Scholar] [CrossRef] [Green Version]
- Prince, P.J.; Dormand, J.R. High order embedded Runge–Kutta formulae. J. Comput. Appl. Math. 1981, 7, 67–75. [Google Scholar] [CrossRef] [Green Version]
- Tsitouras, C. A parameter study of explicit Runge–Kutta pairs of orders 6(5). Appl. Math. Lett. 1998, 11, 65–69. [Google Scholar] [CrossRef] [Green Version]
- Famelis, I.T.; Papakostas, S.N.; Tsitouras, C. Symbolic derivation of Runge–Kutta order conditions. J. Symbolic Comput. 2004, 37, 311–327. [Google Scholar] [CrossRef] [Green Version]
- Tsitouras, C. Runge–Kutta pairs of orders 5(4) satisfying only the first column simplifying assumption. Comput. Math. Appl. 2011, 62, 770–775. [Google Scholar] [CrossRef] [Green Version]
- Medvedev, M.A.; Simos, T.E.; Tsitouras, C. Fitted modifications of Runge–Kutta pairs of orders 6(5). Math. Meth. Appl. Sci. 2018, 41, 6184–6194. [Google Scholar] [CrossRef]
- Simos, T.E.; Kovalnogov, V.N.; Shevchuk, I.V. Perspective of mathematical modeling and research of targeted formation of disperse phase clusters in working media for the next-generation power engineering technologies. In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2017; Volume 1863, p. 560099. [Google Scholar]
- Tsitouras, C. Optimized explicit Runge–Kutta pair of orders 9(8). Appl. Numer. Math. 2001, 38, 121–134. [Google Scholar] [CrossRef]
- Shen, Y.C.; Lin, C.L.; Simos, T.E.; Tsitouras, C. Runge–Kutta Pairs of Orders 6 (5) with Coefficients Trained to Perform Best on Classical Orbits. Mathematics 2021, 9, 1342. [Google Scholar] [CrossRef]
- Kovalnogov, V.N.; Simos, T.E.; Tsitouras, C. Runge–Kutta pairs suited for SIR-type epidemic models. Math. Meth. Appl. Sci. 2021, 44, 5210–5216. [Google Scholar] [CrossRef]
- Dormand, J.R.; Lockyer, M.A.; McGorrigan, N.E.; Prince, P.J. Global error estimation with Runge–Kutta triples. Comput. Math. Appl. 1989, 18, 835–846. [Google Scholar] [CrossRef] [Green Version]
- Verner, J.H. Some Runge–Kutta formula pairs. SIAM J. Numer. Anal. 1991, 28, 496–511. [Google Scholar] [CrossRef]
- Simos, T.E.; Tsitouras, C. Evolutionary derivation of Runge–Kutta pairs for addressing inhomogeneous linear problems. Numer. Algor. 2021, 62, 2101–2111. [Google Scholar] [CrossRef]
- Papakostas, S.N. RhD Dissertation, National Technical University of Athens, Athens. 1996. Available online: https://www.didaktorika.gr/eadd/handle/10442/6561 (accessed on 23 June 2021).
- Papakostas, S.N.; Tsitouras, C.; Papageorgiou, G. A general family of explicit Runge–Kutta pairs of orders 6(5). SIAM J. Numer. Anal. 1996, 33, 917–936. [Google Scholar] [CrossRef]
- Simos, T.E.; Tsitouras, C. 6th order Runge–Kutta pairs for scalar autonomous IVP. Appl. Comput. Math. 2020, 19, 412–421. [Google Scholar]
- Tsitouras, C. Neural Networks With Multidimensional Transfer Functions. IEEE T. Neural Nets 2002, 13, 222–228. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Liu, C.; Hsu, C.W.; Tsitouras, C.; Simos, T.E. Hybrid Numerov-type methods with coefficients trained to perform better on classical orbits. Bull. Malays, Math. Sci. Soc. 2019, 42, 2119–2134. [Google Scholar] [CrossRef]
- DeMat. Available online: https://www.swmath.org/software/24853 (accessed on 23 June 2021).
- Papakostas, S.N.; Tsitouras, C. High phase-lag order Runge–Kutta and Nyström pairs. SIAM J. Sci. Comput. 1999, 21, 747–763. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| , | , | , |
|---|---|---|
| , | , | , |
| , | , | , |
| , | , | , |
| , | , | , |
| , | , | , |
| , | , | , |
| , | , | |
| , | , | , |
| , | , | , |
| , | , | , |
| , | , | , |
| , | , | , |
| , | , | , |
| , | , | , |
| , | , | , |
| , | , | , |
| , |
| Problem | Solution | |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | ||
| 5 | ||
| 6 | ||
| 7 | ||
| 8 | ||
| 9 |
| Tolerances | ||||||
|---|---|---|---|---|---|---|
| Problem | ||||||
| 1 | ||||||
| 2 | ||||||
| 3 | ||||||
| 4 | ||||||
| 5 | ||||||
| 6 | ||||||
| 7 | ||||||
| 8 | ||||||
| 9 | ||||||
| Tolerances | ||||||
|---|---|---|---|---|---|---|
| Problem | ||||||
| 1 | ||||||
| 2 | ||||||
| 3 | ||||||
| 4 | ||||||
| 5 | ||||||
| 6 | ||||||
| 7 | ||||||
| 8 | ||||||
| 9 | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kovalnogov, V.N.; Fedorov, R.V.; Khakhalev, Y.A.; Simos, T.E.; Tsitouras, C. A Neural Network Technique for the Derivation of Runge–Kutta Pairs Adjusted for Scalar Autonomous Problems. Mathematics 2021, 9, 1842. https://doi.org/10.3390/math9161842
Kovalnogov VN, Fedorov RV, Khakhalev YA, Simos TE, Tsitouras C. A Neural Network Technique for the Derivation of Runge–Kutta Pairs Adjusted for Scalar Autonomous Problems. Mathematics. 2021; 9(16):1842. https://doi.org/10.3390/math9161842
Chicago/Turabian StyleKovalnogov, Vladislav N., Ruslan V. Fedorov, Yuri A. Khakhalev, Theodore E. Simos, and Charalampos Tsitouras. 2021. "A Neural Network Technique for the Derivation of Runge–Kutta Pairs Adjusted for Scalar Autonomous Problems" Mathematics 9, no. 16: 1842. https://doi.org/10.3390/math9161842