
Scholte Wave Dispersion Modeling and Subsequent Application in Seabed Shear-Wave Velocity Profile Inversion

 , , ,
, , , 
Abstract
:1. Introduction
2. Brief Description of Theory
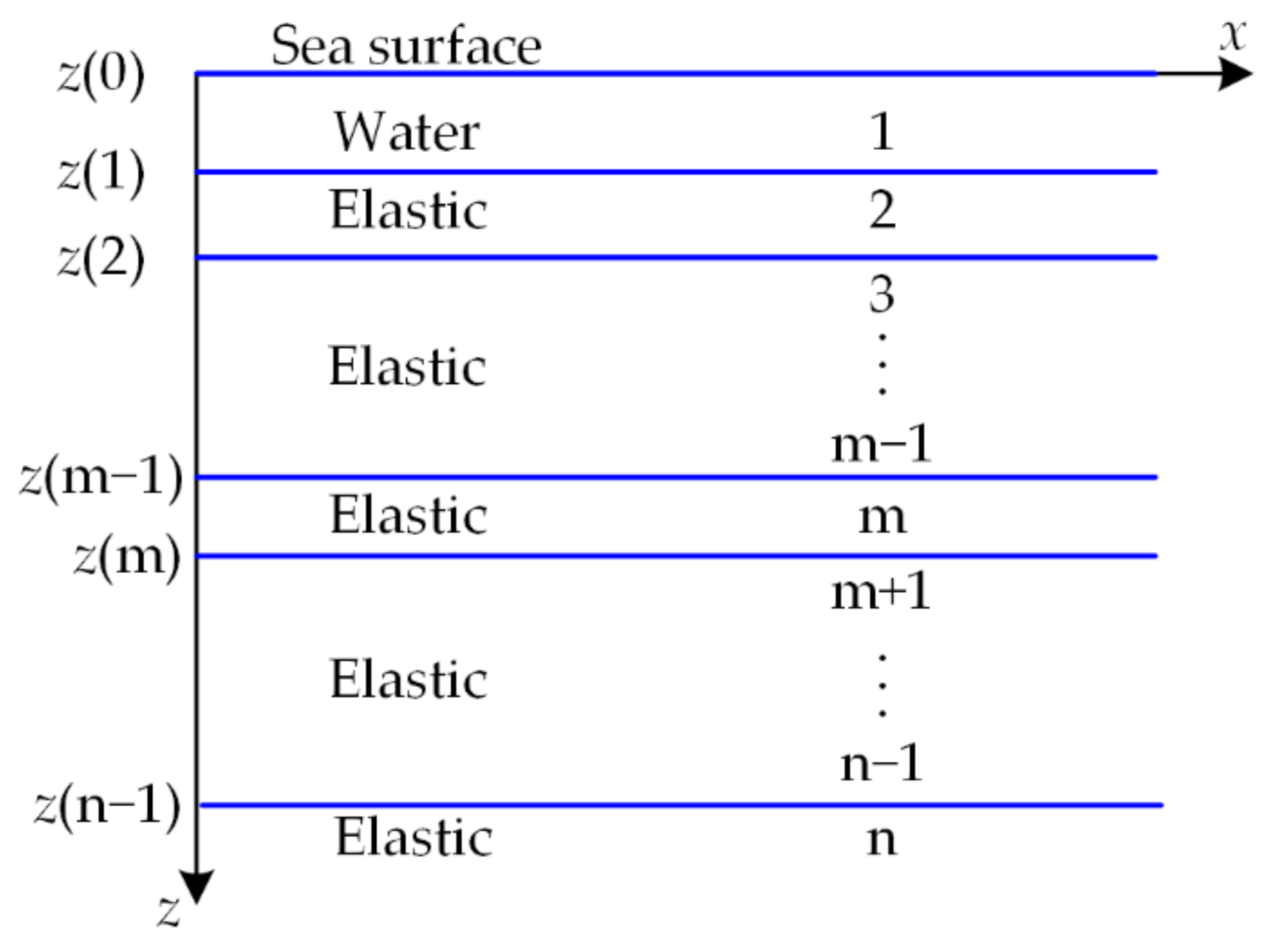
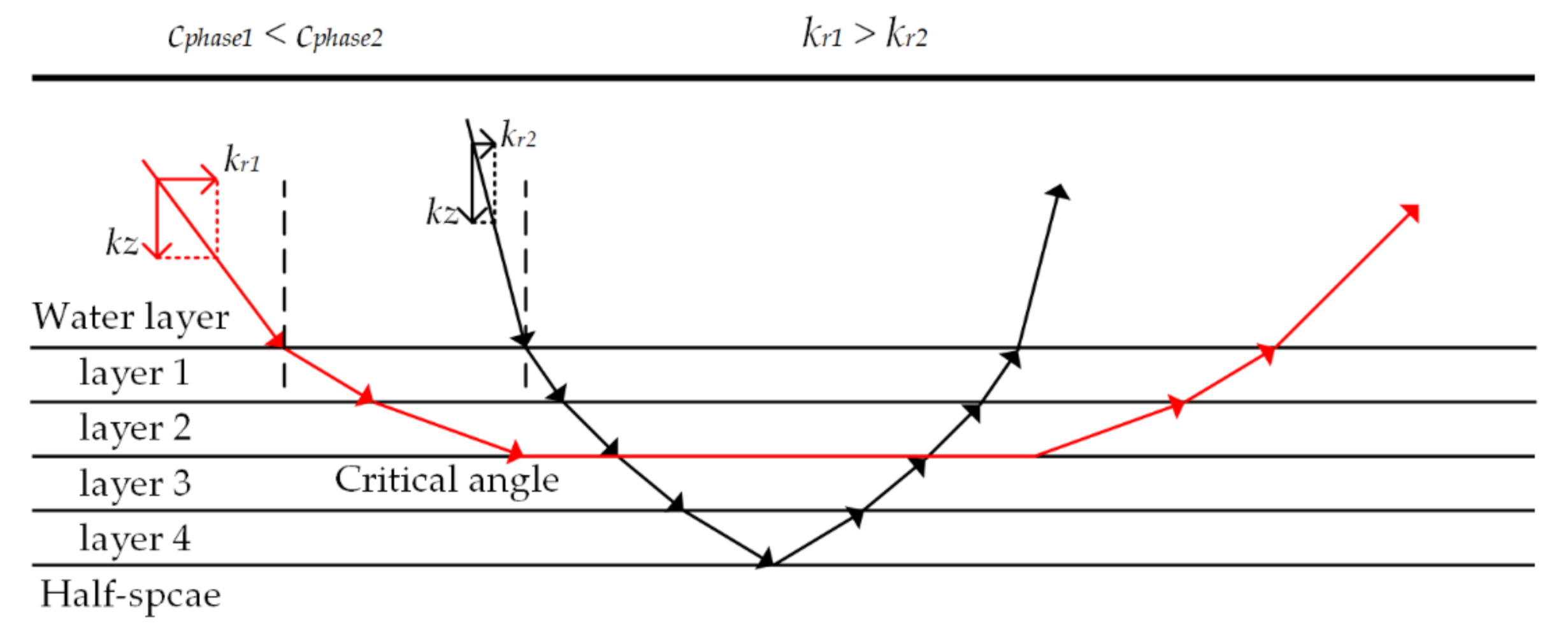
2.1. Scholte Wave Dispersion Modeling
2.2. Bayesian Inversion Theory
3. Dispersion Simulation of Layered Ocean Bottom
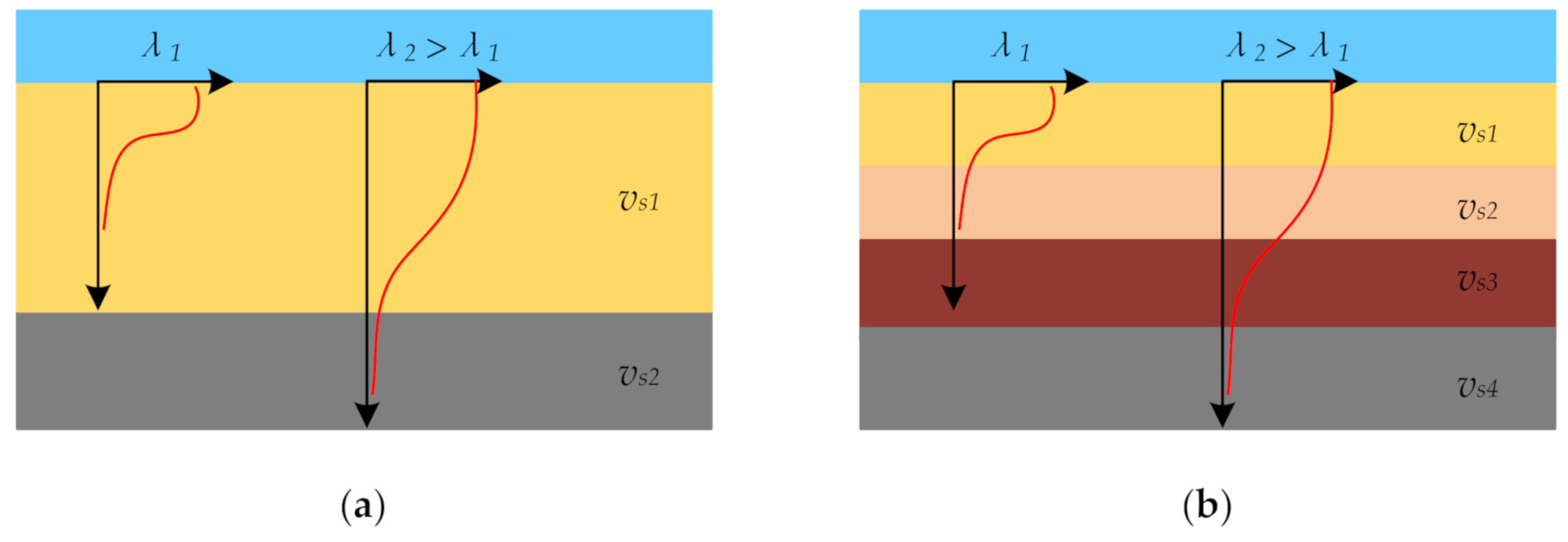
3.1. Fundamental Mode Dispersion
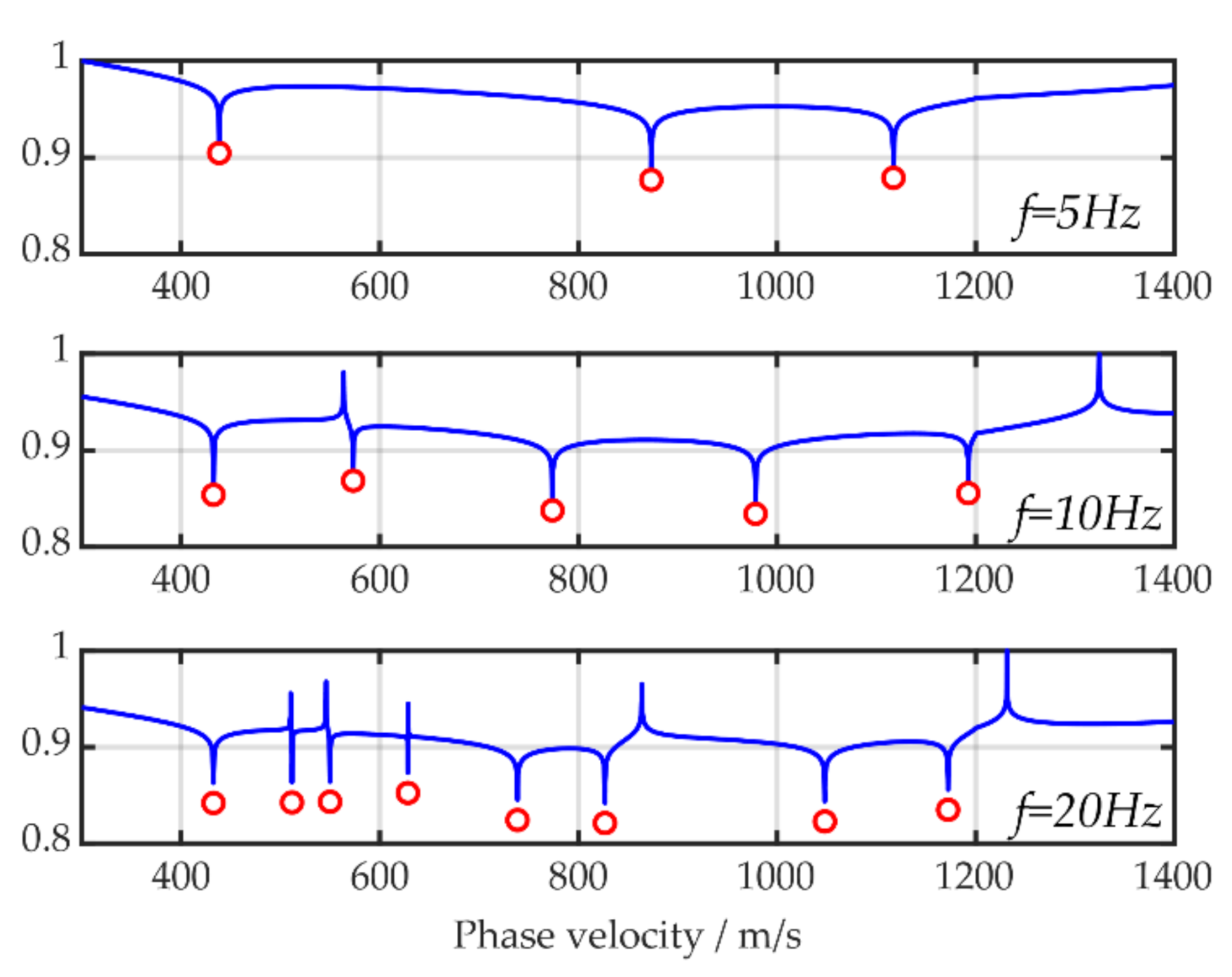
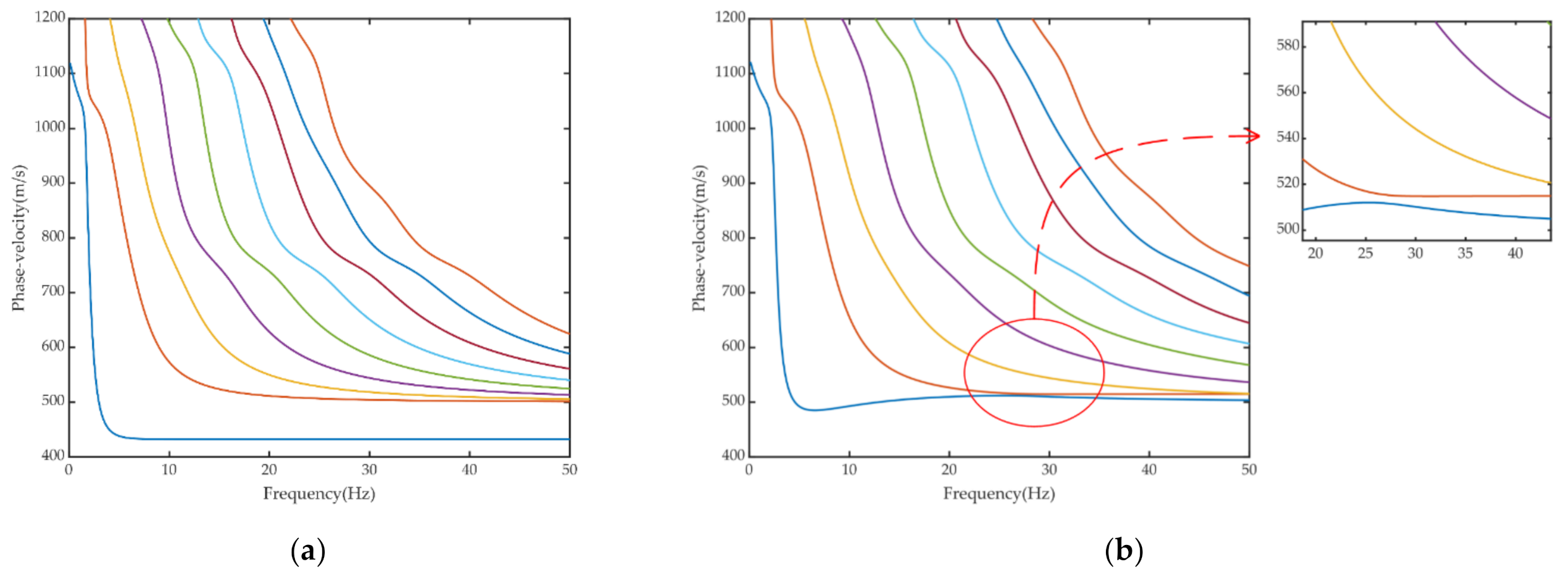
3.2. Fundamental and Higher Mode Dispersion
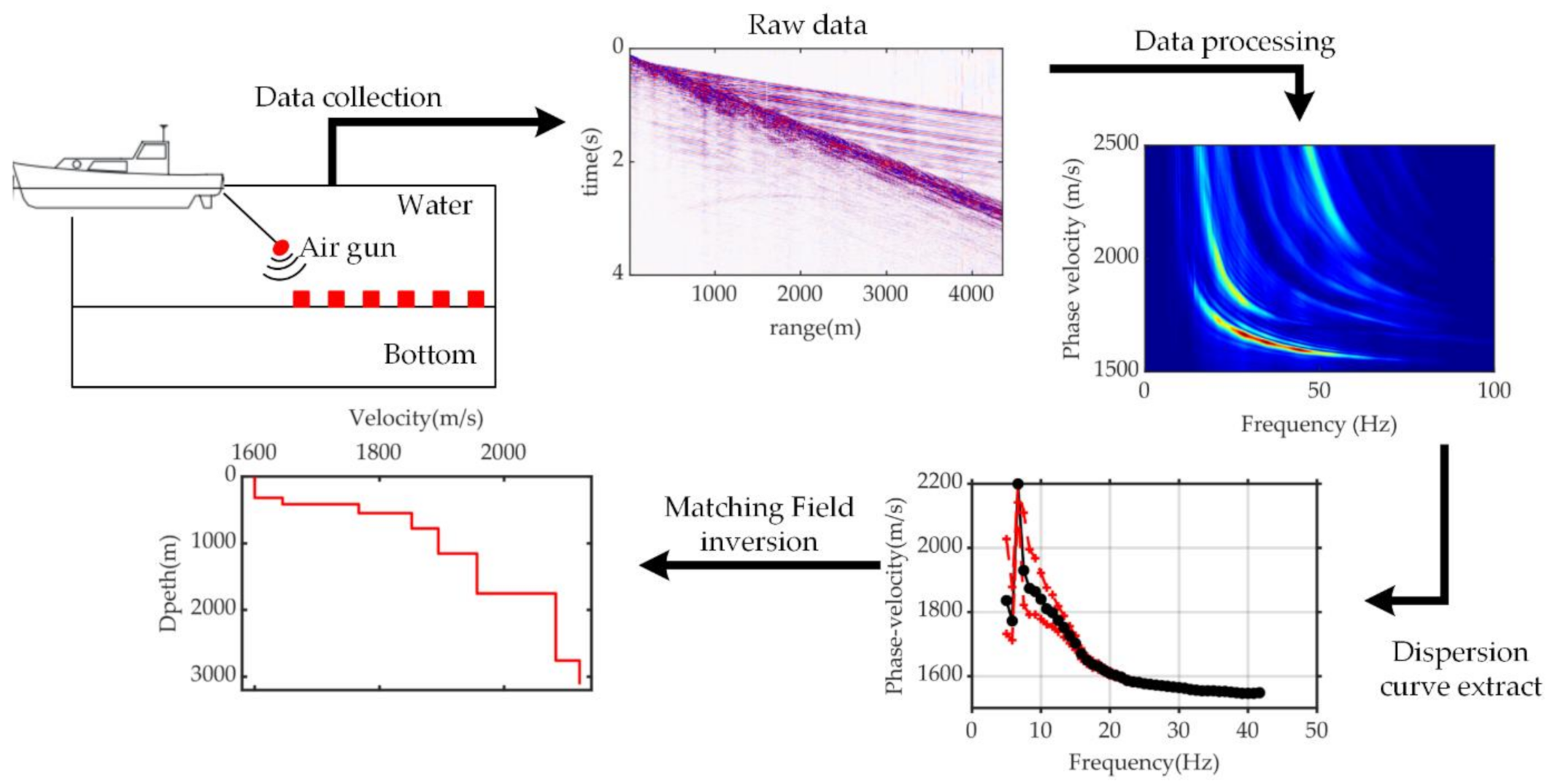
4. Geoacoustic Inversion with Experimental Data
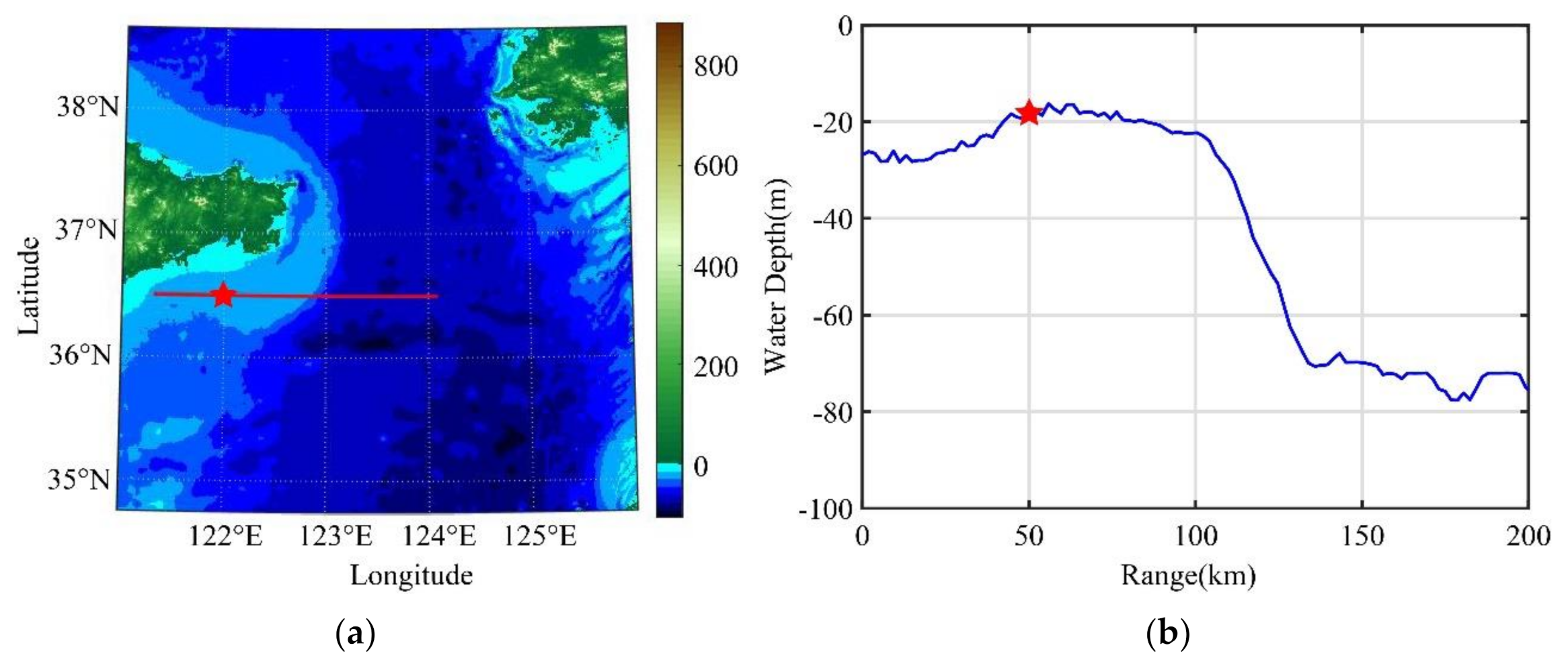
4.1. Experimental Configuration and Data Description
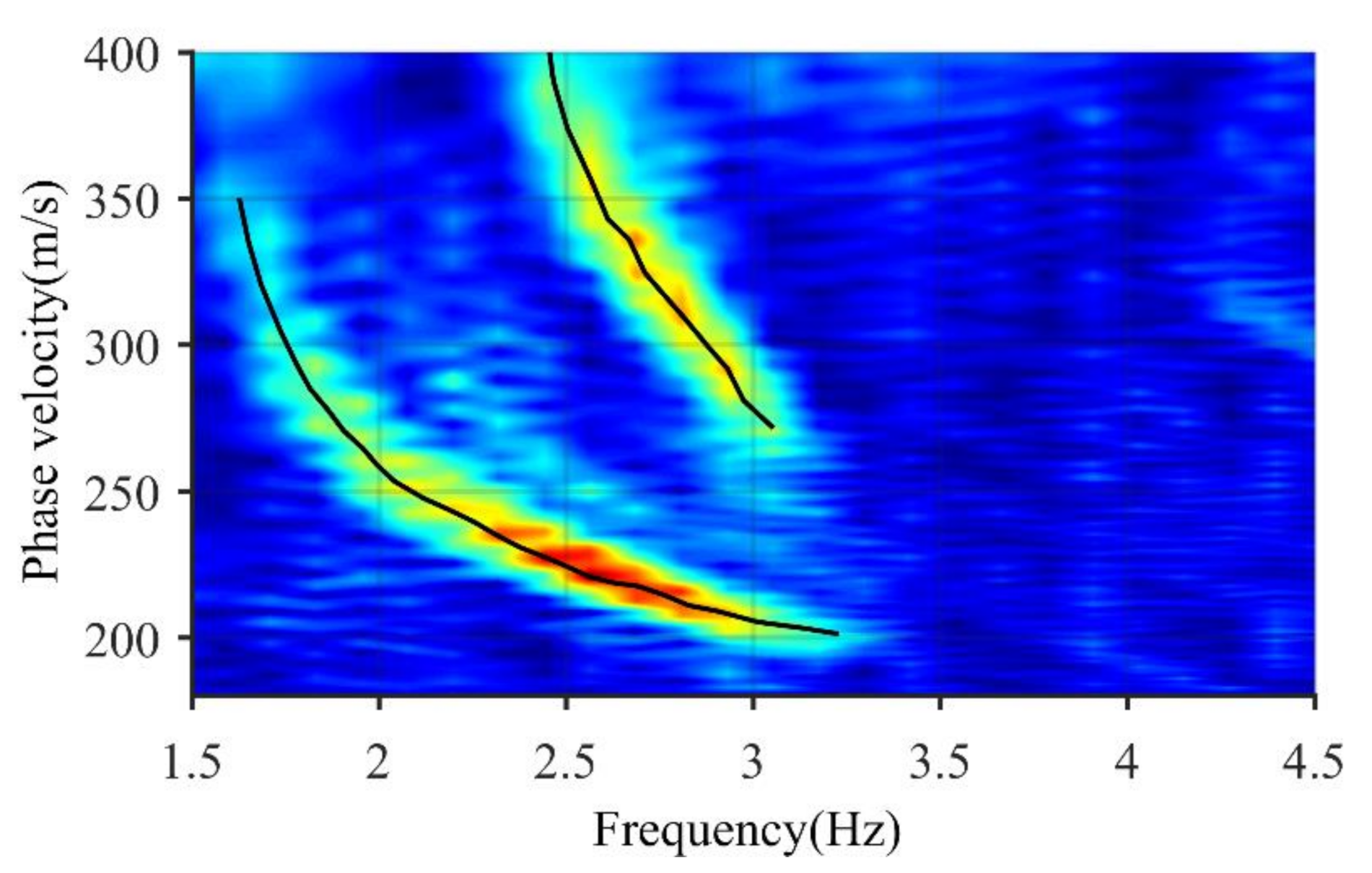
4.2. Analysis of Inversion Result
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Kaufmann, R.D.; Xia, J.; Benson, R.C.; Yuhr, L.B.; Casto, D.W.; Park, C.B. Evaluation of MASW data acquired with a hydrophone streamer in a shallow marine environment. J. Environ. Eng. Geophys. 2005, 10, 87–98. [Google Scholar] [CrossRef]
- Kugler, S.; Bohlen, T.; Bussat, S.; Klein, G. Variability of scholte-wave dispersion in shallow-water marine sediments. J. Environ. Eng. Geophys. 2005, 10, 203–218. [Google Scholar] [CrossRef]
- Park, C.B.; Miller, R.D.; Xia, J.; Ivanov, J.; Sonnichsen, G.V.; Hunter, J.A.; Good, R.L.; Burns, R.A.; Christian, H. Underwater MASW to evaluate stiffness of water-bottom sediments. Lead. Edge 2005, 24, 724–728. [Google Scholar] [CrossRef]
- Xuan, N.N.; Dahm, T.; Grevemeyer, I. Inversion of Scholte wave dispersion and waveform modeling for shallow structure of the Ninetyeast Ridge. J. Seismol. 2009, 13, 543–559. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Dosso, S.E.; Dong, H.; Yu, D.; Liu, L. Bayesian inversion of multimode interface-wave dispersion from ambient noise. IEEE J. Ocean. Eng. 2012, 37, 407–416. [Google Scholar]
- Du, S.; Cao, J.; Zhou, S.; Qi, Y.; Jiang, L.; Zhang, Y.; Qiao, C. Observation and inversion of very-low-frequency seismo-acoustic fields in the South China Sea. J. Acoust. Soc. Am. 2020, 148, 3992. [Google Scholar] [CrossRef] [PubMed]
- Thomson, W.T. Transmission of elastic waves through a stratified solid medium. J. Appl. Phys. 1950, 21, 89–93. [Google Scholar] [CrossRef]
- Haskell, N.A. The dispersion of surface waves on multilayered media. Bull. Seismol. Soc. Am. 1953, 43, 17–34. [Google Scholar] [CrossRef]
- Buchen, P.W.; Ben-Hador, R. Free-mode surface-wave computations. Geophys. J. Int. 1996, 124, 869–887. [Google Scholar] [CrossRef]
- Dunkin, J.W. Computation of modal solutions in layered, elastic media at high frequencies. Bull. Seismol. Soc. Am. 1965, 55, 335–358. [Google Scholar] [CrossRef]
- Watson, T.H. A note on fast computation of Rayleigh wave dispersion in the multilayered half-space. Bull. Seismol. Soc. Am. 1970, 60, 161–166. [Google Scholar]
- Kennett, B. Reflections, rays and reverberations. Bull. Seismol. Soc. Am. 1974, 64, 1685–1696. [Google Scholar]
- Chen, X. A systematic and efficient method of computing normal modes for multilayered half-space. Geophys. J. Int. 2010, 115, 391–409. [Google Scholar] [CrossRef] [Green Version]
- Hu, S.; Zhao, Y.; Wu, J.; Ge, S. Forward modeling of multichannel Rayleigh wave dispersion curve in laterally inhomogeneous media. Chin. J. Geophys. 2021, 64, 1699–1709. [Google Scholar]
- Han, C.; Liu, Z.P.; Zhang, R.H.; Zhang, H.L.; Yang, L.I.; Huang, Y.Y.; University, S.J. Numerical simulation of the Rayleigh surface wave two-dimensional physical models. Prog. Geophys. 2017, 32, 357–362. [Google Scholar]
- Yang, Z.; Chen, X.; Pan, L.; Wang, J.; Xu, J.; Zhang, D. Multi-channel analysis of Rayleigh waves based on Vector Wavenumber Tansformation Method (VWTM). In Geophysical Research Abstracts; EBSCO Industries, Inc.: Birmingham, AL, USA, 2019. [Google Scholar]
- Kausel, E.; Roësset, J.M. Stiffness matrices for layered soils. Bull. Seismol. Soc. Am. 1981, 71, 1743–1761. [Google Scholar] [CrossRef]
- Wang, Y.; Rajapakse, R. An exact stiffness method for elastodynamics of a layered orthotropic half-plane. J. Appl. Mech. 1994, 61, 339–348. [Google Scholar] [CrossRef]
- Rokhlin, S.I.; Wang, L. Stable recursive algorithm for elastic wave propagation in layered anisotropic media: Stiffness matrix method. J. Acoust. Soc. Am. 2002, 112, 822–834. [Google Scholar] [CrossRef] [PubMed]
- Tan, E.L. Stiffness matrix method with improved efficiency for elastic wave propagation in layered anisotropic media. J. Acoust. Soc. Am. 2005, 118, 3400–3403. [Google Scholar] [CrossRef]
- El Allouche, N.; van der Neut, J.; Drijkoningen, G. Separation of PS-wave reflections from ultra-shallow water OBC data using elastic wavefield decomposition. In Proceedings of the 75th EAGE Conference & Exhibition incorporating SPE EUROPEC 2013, London, UK, 10–14 June 2013; p. cp-348-00797. [Google Scholar]
- Richardson, M.D.; Briggs, K.B.; Bentley, S.J.; Walter, D.J.; Orsi, T.H. The effects of biological and hydrodynamic processes on physical and acoustic properties of sediments off the Eel River, California. Mar. Geol. 2002, 182, 121–139. [Google Scholar] [CrossRef]
- Isse, T.; Kawakatsu, H.; Yoshizawa, K.; Takeo, A.; Shiobara, H.; Sugioka, H.; Ito, A.; Suetsugu, D.; Reymond, D.J.E.; Letters, P.S. Surface wave tomography for the Pacific Ocean incorporating seafloor seismic observations and plate thermal evolution. Earth Planet. Sci. Lett. 2019, 510, 116–130. [Google Scholar] [CrossRef]
- Zheng, G.; Zhu, H.; Wang, X.; Khan, S.; Li, N.; Xue, Y. Bayesian inversion for geoacoustic parameters in shallow Sea. Sensors 2020, 20, 2150. [Google Scholar] [CrossRef] [PubMed]
- Bonnel, J.; Dosso, S.E.; Eleftherakis, D.; Chapman, N.R. Trans-dimensional inversion of modal dispersion data on the new england mud patch. IEEE J. Ocean. Eng. 2020, 45, 116–130. [Google Scholar] [CrossRef] [Green Version]
- Lin, S. Advancements in Active Surface Wave Methods: Modeling, Testing, and Inversion; Iowa State University: Ames, IA, USA, 2014. [Google Scholar]
- Dosso, S.E.; Dettmer, J. Bayesian matched-field geoacoustic inversion. Inverse Probl. 2011, 27, 055009. [Google Scholar] [CrossRef] [Green Version]
- Nazarian, S.; Stokoe, K.H., II. In Situ Deyermination of Elastic Moduli of Pavement Syatems by Spectral-Analysis-of-Surface-Waves Method: Practical Aspcts. 1985. Available online: https://trid.trb.org/view/268865 (accessed on 29 July 2021).
- Lowe, M. Matrix techniques for modeling ultrasonic waves in multilayered media. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1995, 42, 525–542. [Google Scholar] [CrossRef]
- Supranata, Y.E. Improving the Uniqueness of Shear Wave Velocity Profiles Derived from the Inversion of Multiple-Mode Surface Wave Dispersion Data; University of Kentucky: Lexington, Kentucky, 2006; Volume 67. [Google Scholar]
- Ryden, N.; Park, C.B. Fast simulated annealing inversion of surface waves on pavement using phase-velocity spectra. Geophysics 2006, 71, R49–R58. [Google Scholar] [CrossRef]
- Pico Vila, R. Waves in Fluids and Solids; IntechOpen: London, UK, 2011. [Google Scholar]
- Boaga, J.; Cassiani, G.; Strobbia, C.L.; Vignoli, G. Mode misidentification in Rayleigh waves: Ellipticity as a cause and a cure. Geophysics 2013, 78, EN17–EN28. [Google Scholar] [CrossRef]
- Dong, H.; Hovem, J.M.; Frivik, S.A. Estimation of shear wave velocity in seafloor sediment by seismo-acoustic interface waves: A case study for geotechnical application. In Theoretical And Computational Acoustics 2005: (With CD-ROM); World Scientific: Singapore, 2006; pp. 33–43. [Google Scholar]
- Lang, S.; Kurkjian, A.; McClellan, J.; Morris, C.; Parks, T. Estimating slowness dispersion from arrays of sonic logging waveforms. Geophysics 1987, 52, 530–544. [Google Scholar] [CrossRef]
- Hamilton, E.L. Vp/Vs and Poisson’s ratios in marine sediments and rocks. J. Acous. Soc. Am. 1979, 66, 1093–1101. [Google Scholar] [CrossRef]
- Xia, J.; Miller, R.D.; Park, C.B. Estimation of near-surface shear-wave velocity by inversion of Rayleigh waves. Geophysics 1999, 64, 1390–1395. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case 1 | Thickness (m) | |||
|---|---|---|---|---|
| Layer 1 | 1500 | - | 1.0 | 100 |
| Layer 2 | 1800 | 500 | 1.5 | 70 |
| Layer 3 | 2400 | 800 | 1.9 | 50 |
| Layer 4 | 2800 | 1200 | 2.3 | Infinite |
| Case 2 | Thickness (m) | |||
|---|---|---|---|---|
| Layer 1 | 1500 | - | 1.0 | 20 |
| Layer 2 | 1800 | 600 | 1.5 | 10 |
| Layer 3 | 2400 | 500 | 1.9 | 20 |
| Layer 4 | 2400 | 800 | 1.9 | 30 |
| Layer 5 | 2800 | 1200 | 2.3 | Infinite |
| layer | Thickness (m) | |||
|---|---|---|---|---|
| 1 | 1500 | - | 1.0 | 20 |
| 2 | 1537 | 238 | 1.49 | 50 |
| 3 | 1602 | 266 | 1.54 | 50 |
| 4 | 1667 | 294 | 1.60 | 50 |
| 5 | 1732 | 322 | 1.65 | 50 |
| 6 | 1797 | 350 | 1.69 | 50 |
| 7 | 1863 | 378 | 1.74 | 50 |
| 8 | 1928 | 405 | 1.78 | 50 |
| 9 | 1993 | 433 | 1.83 | 50 |
| 10 | 2057 | 461 | 1.87 | 50 |
| 11 | 2123 | 489 | 1.91 | 50 |
| 12 | 2189 | 517 | 1.95 | 50 |
| 13 | 2254 | 545 | 1.99 | Inf |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Y.; Piao, S.; Gong, L.; Zheng, G.; Iqbal, K.; Zhang, S.; Wang, X. Scholte Wave Dispersion Modeling and Subsequent Application in Seabed Shear-Wave Velocity Profile Inversion. J. Mar. Sci. Eng. 2021, 9, 840. https://doi.org/10.3390/jmse9080840
Dong Y, Piao S, Gong L, Zheng G, Iqbal K, Zhang S, Wang X. Scholte Wave Dispersion Modeling and Subsequent Application in Seabed Shear-Wave Velocity Profile Inversion. Journal of Marine Science and Engineering. 2021; 9(8):840. https://doi.org/10.3390/jmse9080840
Chicago/Turabian StyleDong, Yang, Shengchun Piao, Lijia Gong, Guangxue Zheng, Kashif Iqbal, Shizhao Zhang, and Xiaohan Wang. 2021. "Scholte Wave Dispersion Modeling and Subsequent Application in Seabed Shear-Wave Velocity Profile Inversion" Journal of Marine Science and Engineering 9, no. 8: 840. https://doi.org/10.3390/jmse9080840