
Adaptive Fixed-Time Control of Strict-Feedback High-Order Nonlinear Systems





1
School of Information and Control Engineering, Qingdao University of Technology, Qingdao 266525, China
2
Faculty of Science, Agriculture, and Engineering, Newcastle University Singapore, Singapore 599493, Singapore
*
Author to whom correspondence should be addressed.
Entropy 2021, 23(8), 963; https://doi.org/10.3390/e23080963
Submission received: 2 July 2021
/
Revised: 22 July 2021
/
Accepted: 26 July 2021
/
Published: 27 July 2021
(This article belongs to the Special Issue Complex Dynamic System Modelling, Identification and Control)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:This paper examines the adaptive control of high-order nonlinear systems with strict-feedback form. An adaptive fixed-time control scheme is designed for nonlinear systems with unknown uncertainties. In the design process of a backstepping controller, the Lyapunov function, an effective controller, and adaptive law are constructed. Combined with the fixed-time Lyapunov stability criterion, it is proved that the proposed control scheme can ensure the stability of the error system in finite time, and the convergence time is independent of the initial condition. Finally, simulation results verify the effectiveness of the proposed control strategy.
1. Introduction
Recently, the adaptive trajectory tracking control of uncertain nonlinear systems has made a significant breakthrough [1,2,3]. In addition, neural network adaptive control has become a popular method in the past decades [4,5,6]. Many remarkable results have extended to strict-feedback systems, pure-feedback systems, and Brunovsky systems, and neural networks are combined with various techniques, such as the backstepping technique, the adaptive technique, and the sliding mode control method [7,8,9]. The neural network is used to identify the nonlinear term of the uncertain system, which combines the advantages of adaptive control. Many excellent articles and monographs have been published. In the design of these control systems, the neural network is used as a general approximator to the uncertain nonlinear term of the systems [10,11,12]. In these systems, the unknown nonlinear systems are approximate by neural networks, which are valid only within a compact set, and the neural network controller is designed. Based on Lyapunov uniformly bounded (UUB) theory, the closed-loop error systems are bounded [13,14,15]. In order to overcome the problem of uncertainty or disturbance that does not meet the specific matching conditions, the adaptive controller is usually constructed by combining backstepping control technology with the adaptive neural network. The high-order system is divided into multiple subsystems. The virtual controller of the low-order subsystem is designed first. Then, the recursive design is used until the final design of the neural network adaptive controller to achieve stability of the system, allowing it to possess the desired performance indicators.
In practical engineering applications, the research of high-order nonlinear systems has attracted much attention, and their application is also extensive, for example, as financial systems, communication systems, biological systems, and machine systems [16,17,18]. Some results regarding high-order system control have been obtained following the development of adding a power integrator [19]. The problems studied in recent years involve robust control [20,21], adaptive global stabilization [17], global asymptotic stabilization [22], output feedback stabilization [23], and state feedback output tracking [16]. Many methods have been proposed, such as backstepping technology, adaptive technology, sliding mode control, neural network control, and fuzzy control. However, the above results need to be precise with some unknown coefficients in the system model. In [20], the unknown function in the system is described by the mathematical model of an online neural network. In addition to this pioneering result, high-order system control based on neural networks has been widely developed and applied [24,25,26].
In the actual industrial process, such as in missile systems, aircraft attitude control systems, robot control systems and other industrial control systems, the purpose of controller design is to achieve stability of the controlled system and maintain it for a limited time. However, the control method without considering the convergence time cannot achieve this objective. Compared with the traditional Lyapunov stability theory, the finite-time Lyapunov stability theory has attracted the attention of many researchers because it can make the controlled system stable near the equilibrium state in finite time [27,28,29].
Many researchers combine finite-time control with neural network adaptive control for nonlinear systems with nonlinear functions and dynamic uncertainties based on backstepping and propose many related adaptive finite-time control schemes [30,31,32]. However, there are still many problems to be solved in these existing control strategies. For finite-time control, the convergence time is dependent on the initial condition. However, the ideal weights of NNs are unknown, and it is difficult to obtain a convergence time. Therefore, to solve this issue, fixed-time neural network control is an appropriate selection of the control method.
The high-order systems’ neural network control problem is discussed in the articles [33,34,35]. The fixed-time neural network adaptive controller is present for nonlinear high-order systems. Based on the fixed-time adaptive technology, the strict-feedback high-order system has fixed-time Lyapunov stability based on Lyapunov stability theory [36,37,38]. The convergence time of the system can be accurately calculated, and the settling time does not rely on the initial situation. The main contributions of this article are as follows:
- (1)
- The combination of the neural network adaptive control with fixed-time Lyapunov stability theory for high-order nonlinear system control problems.
- (2)
- The design of the fixed-time adaptive law of the error systems for neural networks. The parameters of neural networks are iteratively in fixed time based on the Lyapunov fixed-time stability theorem.
- (3)
- The convergence time set by control parameters and adaptive law gain parameters without initial conditions to ensure the control performance.
This article consists of the following sections: in Section 2, a strict-feedback high-order nonlinear mathematical description of the problem is presented; in Section 3, the adaptive fixed-time neural network control scheme for the strict-feedback high-order nonlinear system is designed; in Section 4, simulation results show the effectiveness of the proposed control strategy; in Section 5, the conclusion of the article is presented.
2. Problem Formation and Preliminaries
Consider the following strict-feedback high-order nonlinear system:
where is the state of the system; is the state vector of the system; is the unknown smooth function; is the output of the system; is the corresponding control input of the system; is the order of the system; is the unknown control gain parameter and satisfies , where are known parameters; and the desired trajectory and its derivative are continuous and bounded.
Lemma 1.
For positive real numbers with a denominator and numerator, both are odd numbers and positive real numbers; then, the following inequalities hold:
whereare determined by [39].
Lemma 2.
For any constant where andare odd, the following inequality holds:
whereand, .
Proof.
Assuming , for any constant, the following equation holds:
where is an existent constant and satisfies ; therefore,
because , then ; therefore,
On the other hand, based on , for , we have
then, we choose
therefore,
Then,
where . □
3. Main Results
In this section, for the strict-feedback high-order nonlinear system, the neural network is used to identify the nonlinear system, and an adaptive algorithm is used to adjust the weight coefficient of the neural network. Based on fixed-time Lyapunov stability theory, a neural network adaptive tracker based on backstepping control strategy is designed so that the system state can track the preset trajectory. Theoretical proof and a numerical simulation are given.
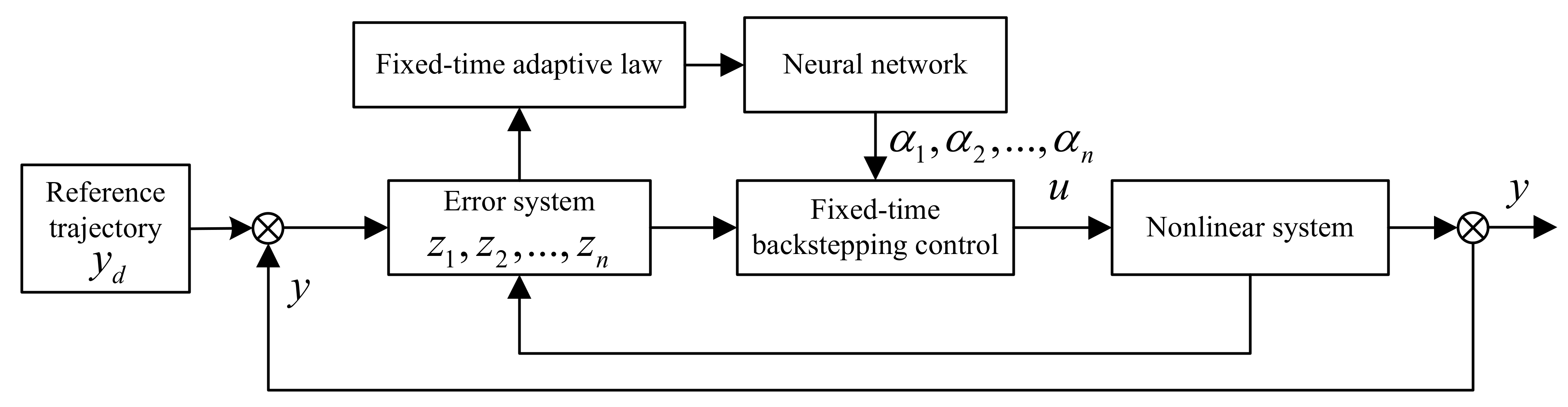
The design block diagram of the closed-loop system is shown in Figure 1. For high-order nonlinear systems with strict-feedback form, a neural network adaptive controller is designed to make the system track a given target signal in finite time. The convergence time is independent of the initial condition to achieve fixed-time Lyapunov stability of the closed-loop error system. The controller design can be divided into the following N steps:
Step 1: First, for the system, the following variables are selected:
the dynamics of can be obtained as
Moreover, we have
where , we have
is defined, and the Lyapunov candidate functional is chosen as
where is positive constant, and . Differentiating with respect to time yields
The virtual control signal is selected as
Then, based on Lemma 2, we have
where
then the adaptive law design as
based on Equation (18), we have
based on Lemma 1, we have
then
Step i: the tracking error can be described as
Based on dynamics and tracking error, the dynamics of can be obtained as
Moreover, we have
where ; we have
is defined, and the Lyapunov candidate functional is chosen as
where is positive constant and . Differentiating with respect to time , yields
The virtual control signal is designed as
then, based on Lemma 2, we have
where
Then, the adaptive law design as
based on Equation (31), we have
based on Lemma 1, we have
then
Step n: the time derivative of can be described as
Based on dynamics and tracking error, the dynamics of can be obtained as
Moreover, we have
where , we have
is defined, and the Lyapunov candidate functional is chosen as
where is positive constant and . Differentiating with respect to time yields
The actual control is designed as
then, based on Lemma 2, we have
then, the adaptive law design as
based on Equation (20), we have
based on Lemma 1, we have
then
Figure 1.
Block diagram of the closed-loop system.

Theorem 1.
For the strict-feedback high-order nonlinear system with unknown nonlinearity (1), based on the feasible virtual control signal (17), (30), actual controller (43), and adaptive function (20) (33), the error system is fixed-time Lyapunov stable, and the convergence time is independent of the initial condition.
Proof.
Based on Lyapunov candidate functional (15), (28), (41), the Lyapunov candidate functional is chosen.
The virtual control signal is chosen as (17), (30), and the fixed-time adaptive function is chosen as (20), (33); the controller is designed as (43) according to the fixed-time Lyapunov stability theory. Based on fixed-time adaptive neural network control and backstepping technology, and taking the trajectory along the system, we have
where
Therefore, according to the lemma in [39], all closed-loop signals possess fixed-time Lyapunov stability. □
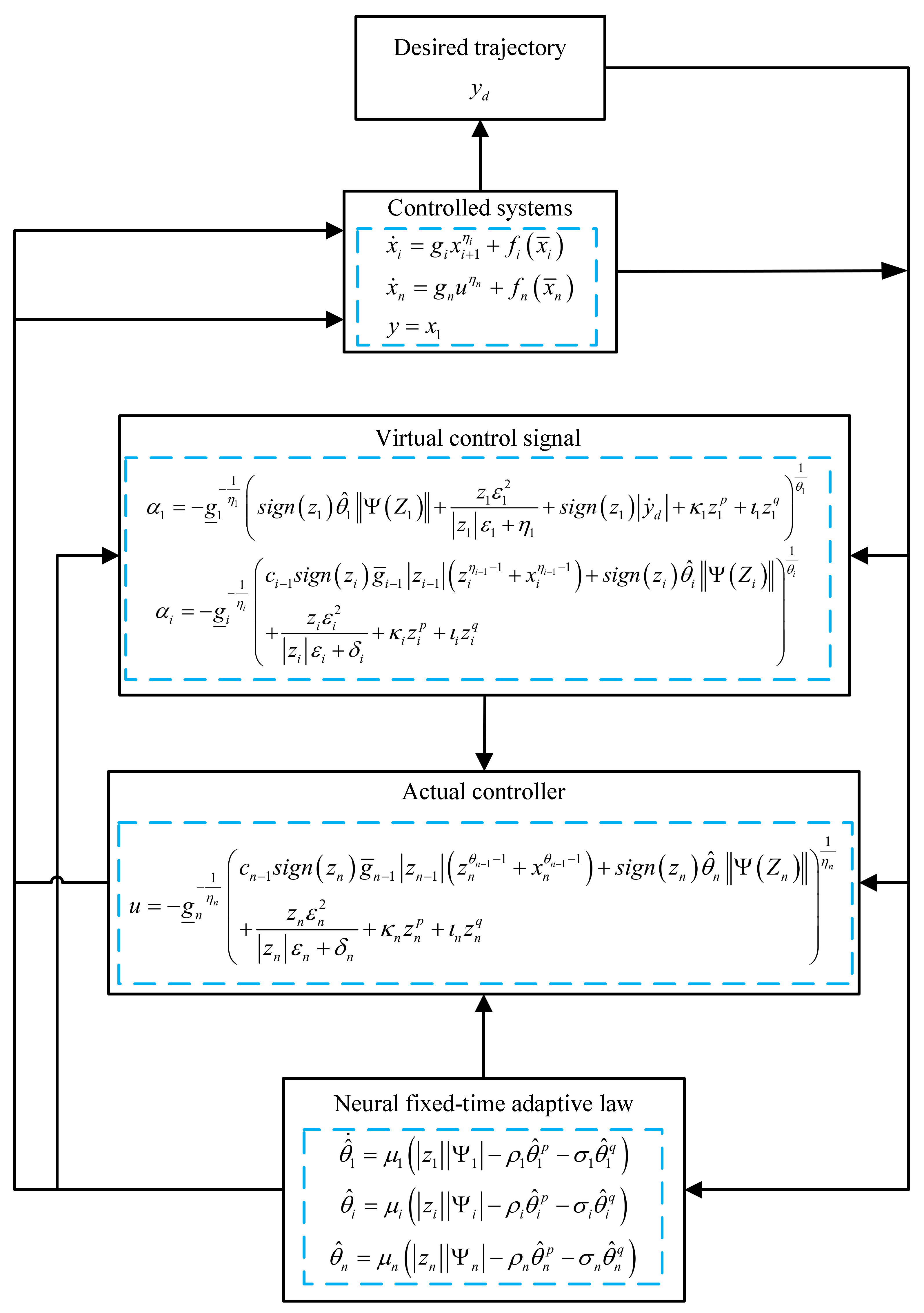
The design details are summarized in Figure 2 to show the procedure of the control process.
4. Numerical Examples
In this paper, the feasibility and effectiveness of the algorithm are verified by numerical simulation. A strict-feedback high-order system is considered as follows:
where the function , , , , , , and the control input under the adaptive law is designed
the control input is designed as
The desired reference signal is . The initial condition is selected as . The neural network consists of seven nodes, centers , and widths .
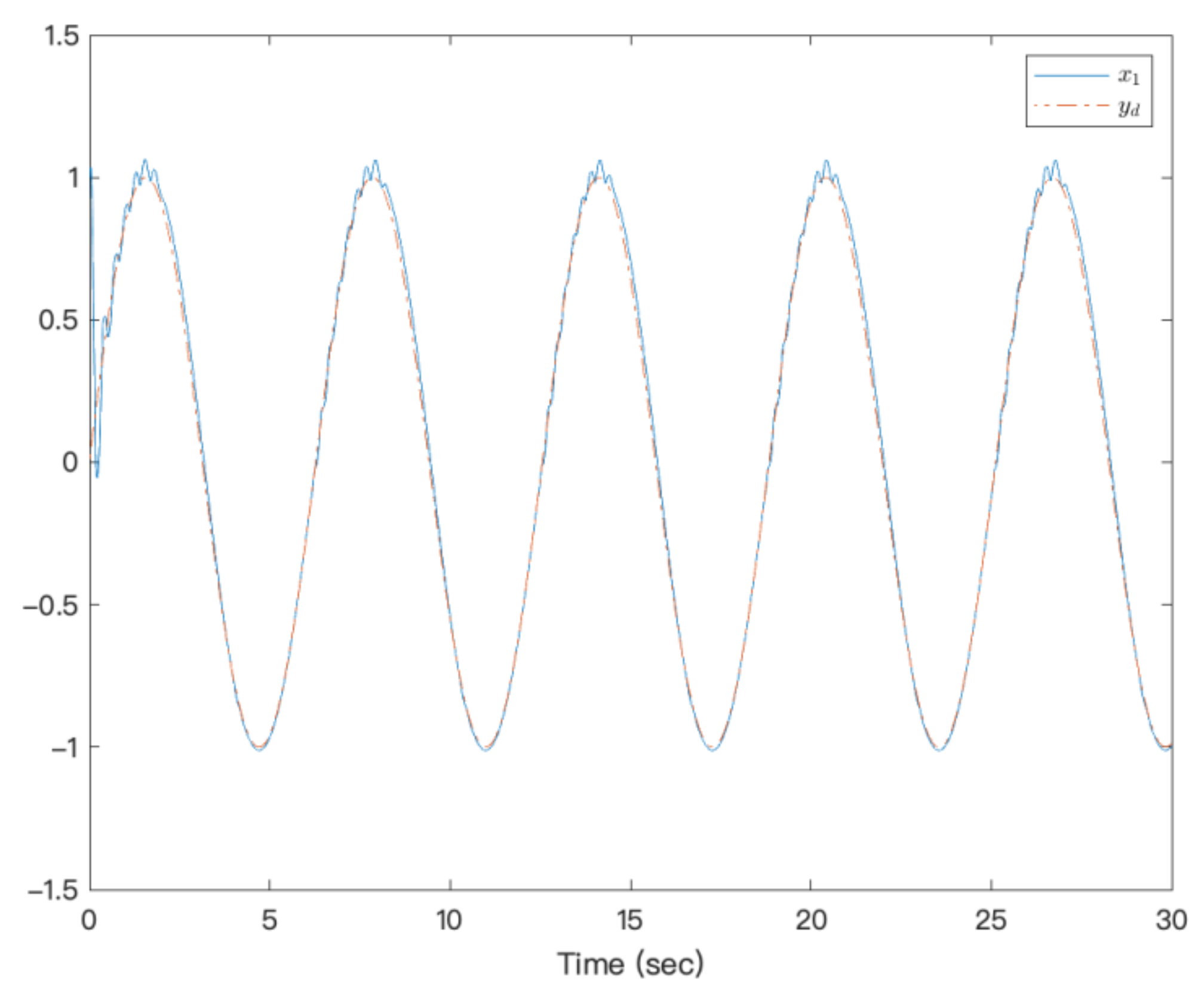
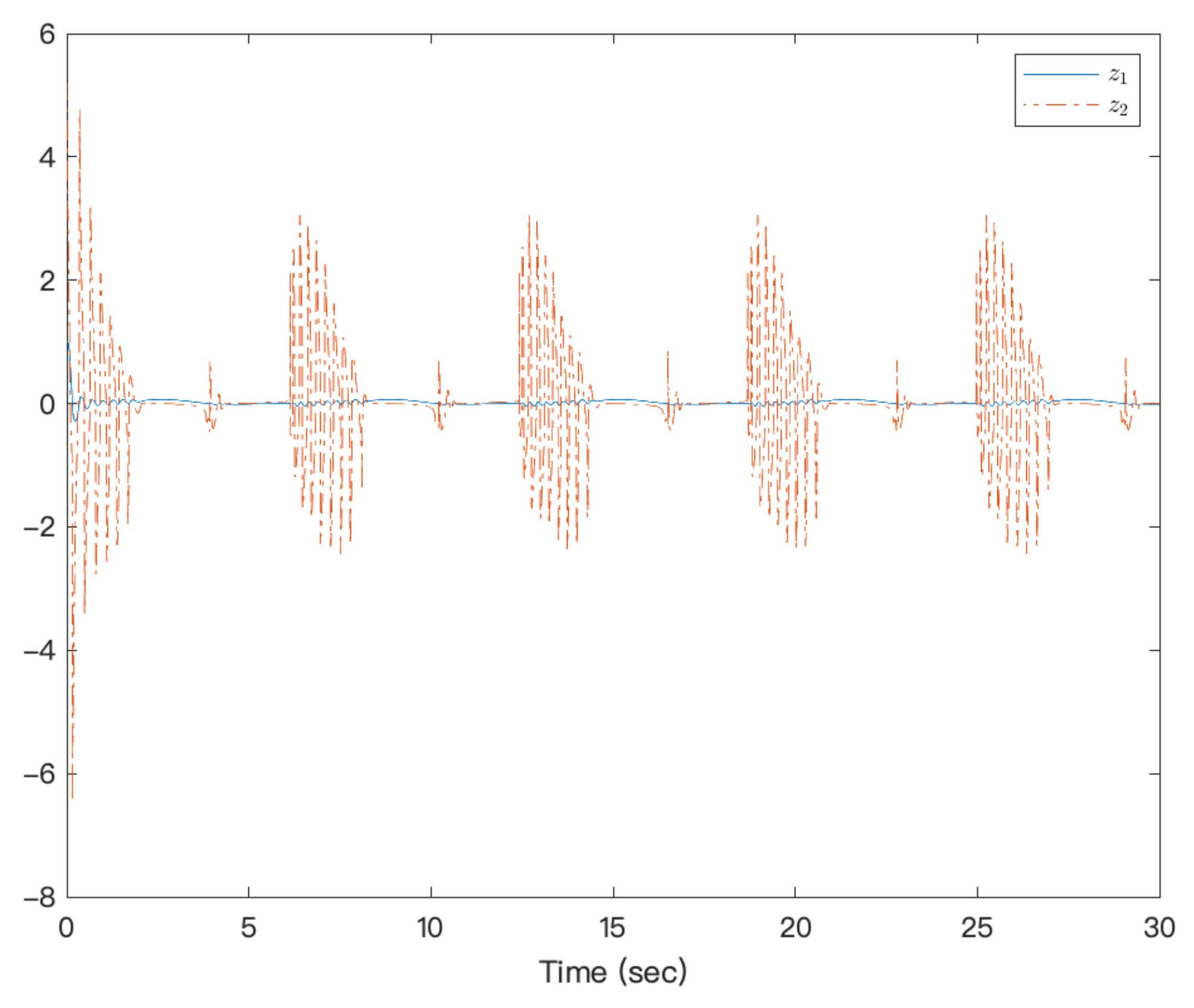
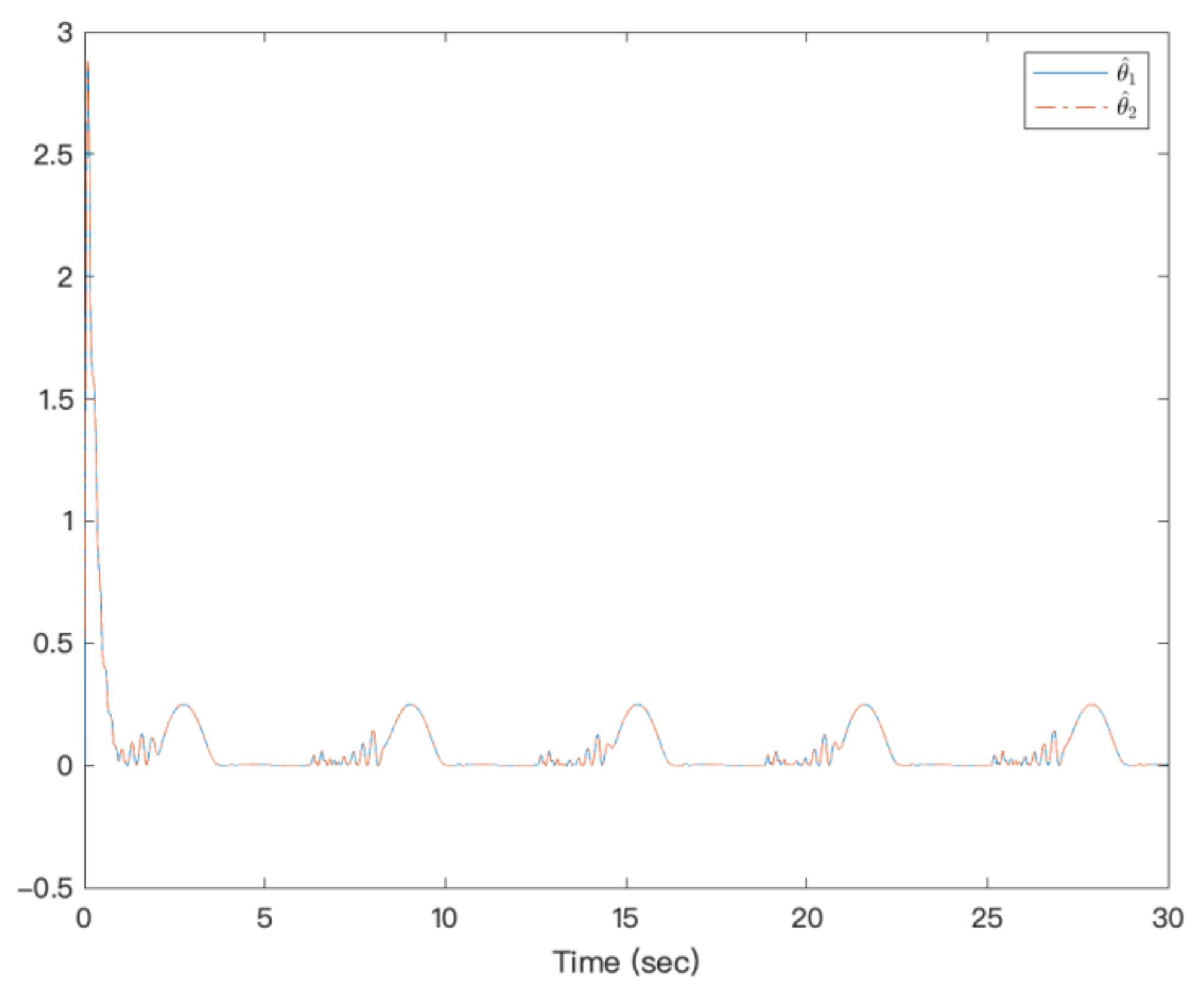
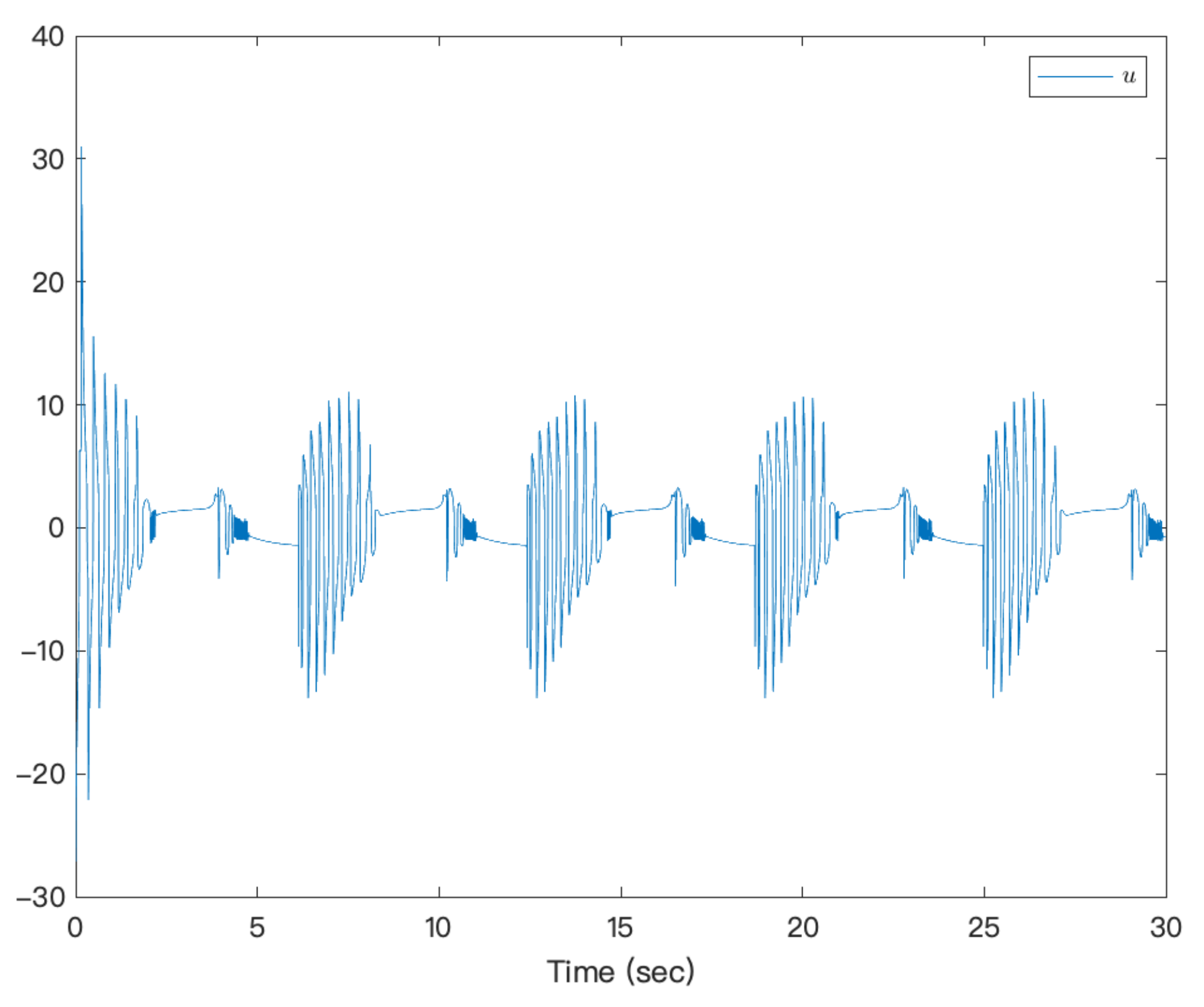
Figure 3 shows that under the action of the neural network adaptive controller, the state of the controlled system state can track the preset trajectory in finite time. Figure 4 shows the state trajectory of the error system. It can be seen from the figure that under the action of the controller, the error system achieves fixed-time Lyapunov stability. The adaptive function curve is shown in Figure 5. For fixed-time control, is designed by , which is approximated by NNs, but its derivative is not easy to approximate; therefore, is not easy to approximate, and the amplitude is inevitable. Figure 6 shows that the system’s controllers are bounded. It can be seen from the figures that the designed method is effective.
5. Conclusions
In this paper, based on backstepping adaptive control technology, a neural network is used to approximate some unknown signals in a system. Combined with Lyapunov stability theorem and fixed time stability, an effective adaptive control scheme is designed. A class of strict-feedback high-order systems is further studied. The main contributions of this paper are as follows: the fixed-time control problem of strict-feedback high-order nonlinear systems is solved; the Lyapunov function is designed for each subsystem; at the same time, combined with adaptive backstepping technology, an adaptive neural network fixed-time controller is designed. The tracking error converges in finite time through stability analysis, and the convergence time does not relay on the initial condition. The most popular controller is designed in a linear control strategy, which controls the state’s exponential stability. At present, the adaptive neural network control method based on backstepping has some limitations, and many problems need to be further studied and solved. In the finite-time adaptive control method for the multi-agent system, the finite time obtained by most finite-time control strategies often depends on the initial conditions of the system. Therefore, a finite-time control scheme independent of the initial value for a multi-agent system must be designed.
Author Contributions
Conceptualization, Y.L. and J.Z.; methodology, Y.L.; software, X.Y.; validation, Y.L., J.Z. and X.Y.; formal analysis, J.Z.; investigation, Y.L.; resources, C.S.C.; data curation, C.S.C.; writing—original draft preparation, Y.L.; writing—review and editing, Y.L.; visualization, Y.L.; supervision, Y.L.; project administration, Y.L.; funding acquisition, Y.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Utkin, V.I. Sliding Mode Control Design Principles and Applications to Electric Drives. IEEE Trans. Ind. Electron. 2002, 40, 23–36. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Wang, Y.; Yao, D.; Lu, R. A Sliding Mode Approach to Stabilization of Nonlinear Markovian Jump Singularly Perturbed Systems—ScienceDirect. Automatica 2018, 97, 404–413. [Google Scholar] [CrossRef]
- Zhou, J.; Wen, C. Robust adaptive control of uncertain nonlinear systems in the presence of input saturation. IFAC Proc. Vol. 2006, 39, 149–154. [Google Scholar] [CrossRef]
- Niu, B.; Duan, P.; Li, J.; Li, X. Adaptive Neural Tracking Control Scheme of Switched Stochastic Nonlinear Pure-Feedback Nonlower Triangular Systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 975–986. [Google Scholar] [CrossRef]
- Li, X.; Cheah, C.C. Adaptive Neural Network Control of Robot Based on a Unified Objective Bound. IEEE Trans. Control Syst. Technol. 2014, 22, 1032–1043. [Google Scholar] [CrossRef]
- Dai, S.L.; Wang, C.; Wang, M. Dynamic learning from adaptive neural network control of a class of nonaffine nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 2013, 25, 111–123. [Google Scholar]
- Park, J.; Kim, S.; Park, T. Output-Feedback Adaptive Neural Controller for Uncertain Pure-Feedback Nonlinear Systems Using a High-Order Sliding Mode Observer. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 1596–1601. [Google Scholar] [CrossRef]
- Ge, S.S.; Wang, C. Adaptive NN control of uncertain nonlinear pure-feedback systems. Automatica 2002, 38, 671–682. [Google Scholar] [CrossRef]
- Zhao, Q.; Lin, Y. Adaptive dynamic surface control for pure-feedback systems. Int. J. Robust Nonlinear Control 2012, 22, 1647–1660. [Google Scholar] [CrossRef]
- Na, J.; Ren, X.; Zheng, D. Adaptive control. for nonlinear pure-feedback systems with high-order sliding mode observer. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 370–382. [Google Scholar]
- Sun, G.; Wang, D.; Peng, Z. Adaptive control based on single neural network approximation for non-linear pure-feedback systems. IET Control Theory Appl. 2012, 6, 2387–2396. [Google Scholar] [CrossRef]
- Wang, H.; Chen, B.; Lin, C.; Sun, Y. Observer-based adaptive neural control for a class of nonlinear pure-feedback systems. Neurocomputing 2015, 171, 1517–1523. [Google Scholar] [CrossRef]
- Wang, H.; Liu, P.X.; Bao, J.; Xie, X.J.; Li, S. Adaptive neural output-feedback decentralized control for large-scale nonlinear systems with stochastic disturbances. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 972–983. [Google Scholar] [CrossRef]
- Zhou, Q.; Zhao, S.; Li, H.; Lu, R.; Wu, C. Adaptive neural network tracking control. for robotic manipulators with dead zone. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3611–3620. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Wang, Y.; Chen, X.; Su, C.Y.; Li, Z.; Wang, C.; Peng, Y. Decentralized adaptive neural approximated inverse control for a class of large-scale nonlinear hysteretic systems with time delays. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2424–2437. [Google Scholar] [CrossRef]
- Qian, C.; Lin, W. Practical output tracking of nonlinear systems with uncontrollable unstable linearization. IEEE Trans. Autom. Control 2002, 47, 21–36. [Google Scholar] [CrossRef]
- Lin, W.; Pongvuthithum, R. Nonsmooth adaptive stabilization of cascade systems with nonlinear parameterization via partial-state feedback. IEEE Trans. Autom. Control 2003, 48, 1809–1816. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, S.; Liao, L. Consensus of High-Order Discrete-Time Multiagent Systems with Switching Topology. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 721–730. [Google Scholar] [CrossRef]
- Lin, W.; Qian, C. Robust regulation of a chain of power integrators perturbed by a lower-triangular vector field. Int. J. Robust Nonlinear Control 2000, 10. [Google Scholar] [CrossRef]
- Zhao, X.; Shi, P.; Zheng, X.; Zhang, J. Intelligent tracking control for a class of uncertain high-order nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1976–1982. [Google Scholar] [CrossRef]
- Khandekar, A.A.; Malwatkar, G.M.; Patre, B.M. Discrete sliding mode control for robust tracking of higher order delay time systems with experimental application. ISA Trans. 2013, 52, 36–44. [Google Scholar] [CrossRef]
- Gao, F.; Wu, Y. Further results on global state feedback stabilization of high-order nonlinear systems with time-varying delays. ISA Trans. 2015, 55, 41–48. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Zhang, X.H.; Xie, X.J. Global continuous output-feedback stabilization for a class of high-order nonlinear systems with multiple time delays. J. Frankl. Inst. 2014, 351, 4334–4356. [Google Scholar] [CrossRef]
- Feng, S.S.; Sun, Z.Y.; Zhou, C.Q.; Chen, C.C.; Meng, Q. Output tracking control via neural networks for high-order stochastic nonlinear systems with dynamic uncertainties. Int. J. Fuzzy Syst. 2021, 23, 716–726. [Google Scholar] [CrossRef]
- Shahriari-Kahkeshi, M.; Afrush, A.; Pham, V.T. Adaptive consensus control of high-order uncertain nonlinear multi-agent systems with fuzzy dead-zone. Int. J. Fuzzy Syst. 2021, 23, 743–754. [Google Scholar] [CrossRef]
- Aghababa, M.P.; Moradi, S. Robust adaptive dynamic surface back-stepping tracking control of high-order strict-feedback nonlinear systems via disturbance observer approach. Int. J. Control 2020, 17. [Google Scholar] [CrossRef]
- Bhat, S.P.; Bernstein, D.S. Continuous finite-time stabilization of the translational and rotational double integrators. IEEE Trans. Autom. Control 1998, 43, 678–682. [Google Scholar] [CrossRef] [Green Version]
- Bhat, S.P.; Bernstein, D.S. Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 2000, 38, 751–766. [Google Scholar] [CrossRef]
- Qian, C.; Li, J. Global finite-time stabilization by output feedback for planar systems without observable linearization. IEEE Trans. Autom. Control 2005, 50, 885–890. [Google Scholar] [CrossRef]
- Ma, L.; Zong, G.; Zhao, X.; Huo, X. Observed-based adaptive finite-time tracking control for a class of nonstrict-feedback nonlinear systems with input saturation. J. Frankl. Inst. Eng. Appl. Math. 2020, 357, 11518–11544. [Google Scholar] [CrossRef]
- Li, Y.; Li, K.; Tong, S. Adaptive Neural Network finite-time control for multi-input and multi-output nonlinear systems with positive powers of odd rational numbers. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 2532–2543. [Google Scholar] [CrossRef] [PubMed]
- Na, J.; Wang, S.; Liu, Y.J.; Huang, Y.; Ren, X. Finite-time convergence adaptive neural network control for nonlinear servo systems. IEEE Trans. Cybern. 2020, 50, 2568–2579. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Wang, Z.; Chen, Y.; Sheng, W. Adaptive neural event-triggered control for discrete-time strict-feedback nonlinear systems. IEEE Trans. Cybern. 2020, 50, 2946–2958. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.; Zhang, M.; Ri, S.; Xiong, C.; Li, Z.; Kang, Y. High-order disturbance-observer-based sliding mode control for mobile wheeled inverted pendulum systems. IEEE Trans. Ind. Electron. 2020, 67, 2030–2041. [Google Scholar] [CrossRef]
- Fang, L.; Ma, L.; Ding, S.; Zhao, D. Finite-time stabilization for a class of high-order stochastic nonlinear systems with an output constraint. Appl. Math. Comput. 2019, 358, 63–79. [Google Scholar] [CrossRef]
- Xin, B.; Liu, L.; Hou, G.; Ma, Y. Chaos synchronization of nonlinear fractional discrete dynamical systems via linear control. Entropy 2017, 19, 351. [Google Scholar] [CrossRef] [Green Version]
- Li, R.; Zhu, Q.; Narayan, P.; Yue, A.; Yao, Y.; Deng, M. U-model-based two-degree-of-freedom internal model control of nonlinear dynamic systems. Entropy 2021, 23, 169. [Google Scholar] [CrossRef]
- Olvera-Guerrero, O.A.; Prieto-Guerrero, A.; Espinosa-Paredes, G. Non-linear stability analysis of real signals from nuclear power plants (boiling water reactors) based on noise assisted empirical mode decomposition variants and the shannon entropy. Entropy 2017, 19, 359. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Li, Y.; Fei, W. Neural network-based nonlinear fixed-time adaptive practical tracking control for quadrotor unmanned aerial vehicles. Complexity 2020, 2020, 13. [Google Scholar] [CrossRef]
Figure 2.
Design procedure.

Figure 3.
Trajectories of and of a strict-feedback high-order nonlinear system.

Figure 4.
Trajectories of error states of a strict-feedback high-order nonlinear system.

Figure 5.
Trajectories of adaptive functions of a strict-feedback high-order nonlinear system.

Figure 6.
Trajectories of system input of a strict-feedback high-order nonlinear system.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Li, Y.; Zhang, J.; Ye, X.; Chin, C.S. Adaptive Fixed-Time Control of Strict-Feedback High-Order Nonlinear Systems. Entropy 2021, 23, 963. https://doi.org/10.3390/e23080963
AMA Style
Li Y, Zhang J, Ye X, Chin CS. Adaptive Fixed-Time Control of Strict-Feedback High-Order Nonlinear Systems. Entropy. 2021; 23(8):963. https://doi.org/10.3390/e23080963
Chicago/Turabian StyleLi, Yang, Jianhua Zhang, Xiaoyun Ye, and Cheng Siong Chin. 2021. "Adaptive Fixed-Time Control of Strict-Feedback High-Order Nonlinear Systems" Entropy 23, no. 8: 963. https://doi.org/10.3390/e23080963
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.