1. Introduction
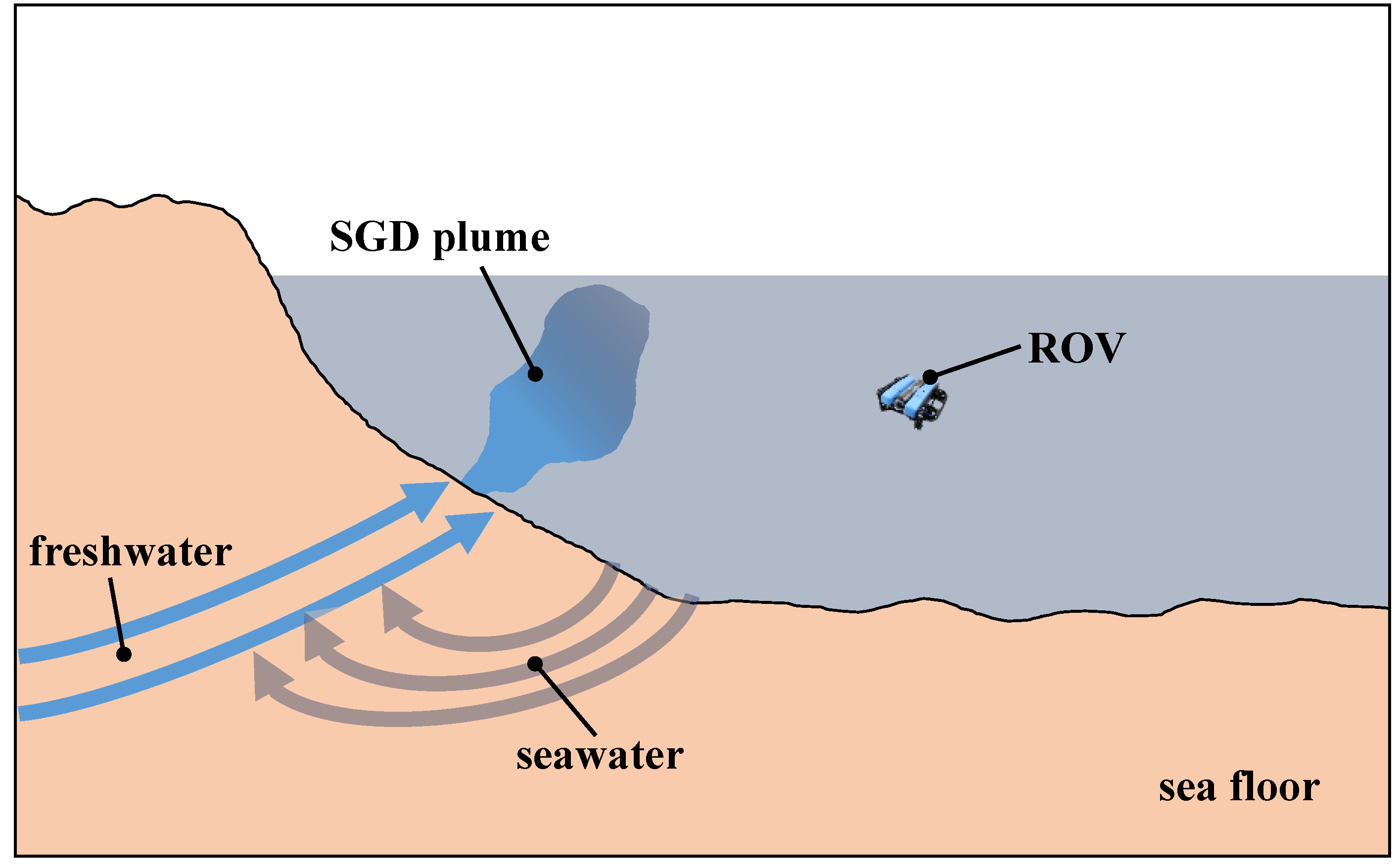
The term Submarine Groundwater Discharge (SGD) covers any flow of water across the seabed into the coastal ocean on continental margins, regardless the composition and the driving force (
Figure 1) [
1,
2]. In general, groundwater can discharge either via submarine springs or via disseminated seepages [
1]. Slow, yet persistent seepage of groundwater through sediments will occur at any place where an aquifer with a positive hydraulic head is connected to a surface water body [
3].
Surić et al. [
5] defined three different kinds of SGD patterns occurring within karstic regions: (1) diffuse seepage through loose sediment, (2) diffuse flow through karst bedrock fissures, and (3) concentrated outflow from conduits and caves. The source type is mainly dependent on the nature of soil, especially on homogeneity and permeability of the soil [
6]. While homogeneous soils, such as sand, favour the development of diffuse seepage, inhomogeneous subsoils such as karst [
5], limestone or volcanic undergrounds [
7] provide for the formation of underwater springs. In these cases, the water flows mainly through cavities in underground streams [
6].
In limestone soil, the dissolution of heterogeneous distributed easily soluble minerals by freshwater creates a random conduit network geometry [
8]. This network has an important influence on the pathway of groundwater flow and the discharge rates of different SGDs. The conduit networks are the main reason for the widespread occurrence of concentrated SGDs in the Dead Sea area [
8]. Usually freshwater plumes, driven by point source SGDs, occur in coastal embayments [
6].
SGDs are recognised as an important pathway for nutrients and pollutions to the marine environment [
1,
9,
10]. The water discharged by SGDs contains significantly higher concentrations of nutrients, carbon, and metals, compared to riverine flux. Hence, SGDs play an important role on local nutrient budgets [
10]. In addition, SGD inputs can lead to deterioration of the coastal marine environment. However, the groundwater fluxes are not as well analysed as river inflows. In many areas, nutrient load of groundwater excels the load of surface water [
10,
11]. Hence, groundwater inflow might trigger algae blooms and the deterioration of marine habitats [
1,
2].
In general, SGDs are driven by various different forces, like positive hydraulic gradients, differences in the water level across a permeable barrier, pressure gradients due to tides, waves, currents and storm events, convection due to fresh groundwater overlaid by salty water, seasonal movement of the freshwater-seawater interface, and geothermal heating [
1]. Taniguchi [
12] has shown, using Fast-Fourier-Transformation (FFT), that the inflow rate of SGDs fluctuated within a semi-daily, daily, and semi-monthly period driven by tidal and neap-spring tidal pumping oscillation, respectively. In their studies, Sholkovitz et al. [
13] confirmed this flow rate dependencies on tides and neap-tides.
Seepage meters are commonly used to assess the inflow of SGDs via disseminated seepage [
2]. Various types of seepage meters were developed in the past to overcome the disadvantages of the first manual seepage meters developed. These were using a plastic bag in order to measure the inflow and outflow of groundwater [
14,
15]. The later designs include different measurement techniques to determine the flow rate, including heat-pulses [
16], ultrasonic-based flow meter [
17], and dye-dilution seepage meters [
13]. These automated seepage meters are designed as open systems. Their designs allow for an unrestricted flow of the seepage in both directions. This overcomes the main drawback of the closed system design using a plastic bag [
13,
16]. The most recent development in the field of seepage meters covers the integration of state-of-the-art sensors into the device. The sensors measure parameters like temperature, salinity, dissolved organic matter fluorescence (FDOM), dissolved oxygen, or turbidity. This allows for a continuous in situ measurement of environmental parameters in order to directly qualify the inflow of nutrients or freshwater [
18].
Even though seepage meters are commonly used to quantify disseminated seepage, they can only be deployed in calm waters, because breaking waves dislodge seepage meters. In addition, a flow through the seabed is induced by strong currents if they pass over or around large objects, like seepage meters [
1].
Tracer studies are another commonly used method to investigate SGD sites. Substances, used as groundwater tracers, should be greatly enriched in the discharged groundwater, in order to provide a detectable signal. In addition, the tracer should behave conservatively, and it should be easy to detect [
1].
The temperature of discharged groundwater is almost constant during the year, while the temperature of the surface water follows the yearly changes of air temperature [
19]. This results in a temperature difference between the discharged groundwater and the surrounding surface water, which nominates the temperature as a suitable tracer for SGDs.
Temperature can be used as a tracer for SGDs in two different ways. On the one hand, under the assumption of conservative heat conduction-advection transport, temperature depth profiles can be used [
6]. On the other hand, a surface temperature difference between floating groundwater and ambient surface water, detected by remote sensing methods, can be used as a qualitative tracer for groundwater seepage and submarine springs [
1]. Due to the temperature differences between discharged groundwater and the sea surface water, thermal discharge plumes develop. These plumes can be detected by cameras observing the long-wavelength infrared radiation, mounted on planes or unmanned aerial vehicles (UAV) [
19]. Mallast and Siebert [
8] used a hovering unmanned aerial vehicle to investigate the spatio-temporal behaviour of submarine springs and disseminated seepage in the dead sea. Thermal radiance patterns recorded over time show a spatio-temporal variation of the thermal radiance pattern size generated by an SGD for both, focused and diffuse SGDs. However, the variation of diffuse SGD patterns is more than three times larger than the spatio-temporal variation of focused SGDs.
Another approach, successfully used in the past, is to conduct seismic surveys [
20,
21,
22]. However, this method only allows the detection of possible SGD spots. It neither allows for flow calculation nor distinguishing between fresh and brackish inflow [
21].
Other methods, like piezometers [
23], measurement of bulk ground conductivity [
24], water mass balance approaches [
6,
25], and hydrograph separation techniques [
1], were successfully used in the past to investigate SGD sites. The flowrate of a point SGD can also be investigated using mechanical flowmeters, carried by SCUBA divers [
26].
The majority of the previously developed methods either investigate the behaviour of SGDs within the aquifer or the mixing of the discharged water on larger scales, for example mixing models applied for calculating SGD inflows into bays [
6]. However, the distribution of the discharged water within the surrounding water column in the proximity of SGDs is not well investigated [
7,
27]. Methods used in these studies, for example thermal radiance cameras or current measurements, only allow limited spatial investigations of the area near SGDs.
A potential tool for investigating the distribution of discharged freshwater within the water column could be the use of sensor-carrying remotely operated vehicles (ROVs). Due to limited access, the impact of SGDs on the marine environment is not fully understood, yet. Combining sensor-equipped ROVs with the other aforementioned methods would potentially enable a deeper insight into the impact of SGDs on the marine environment.
The term ROV generally includes all unmanned and tethered underwater vehicles [
28]. ROVs are categorised, based on their main field of application, as: (1) working class, (2) observation class, and (3) special use ROVs [
28]. These classes can be divided further, according to the dimensions and the weight of the ROVs, into: (1) heavy work class, (2) light work class, (3) medium sized, and (4) micro/handheld ROVs, where the medium- and micro-sized ROVs are usually used as observational ROVs [
29].
The first ROVs were developed in the middle of the last century. Dimitri Rebikoff developed the first ROV, named POODLE, in 1953 [
28]. It was used to carry out archaeological research. From the 1960s to the 1980s, ROV development was mainly driven by research projects funded by the US Navy and other governmental institutions. These projects aimed, for example, at the development of vehicles for the investigation and the recovery of lost torpedoes and ammunition [
28].
However, in the 1990s, commercial ROVs became available and since then have been used in the areas of offshore oil and gas research and for the inspection of underwater structures [
29]. Additionally, ROVs have been used for scientific research, for instance for observing fish schools [
30] or for taking water samples [
31]. ROVs used in these applications can usually be categorised as heavy work class, or medium-sized observational class ROVs [
30]. Due to the high weight of such ROVs, additional equipment, for instance a crane, is required to deploy and recover such ROVs. Therefore, operation requires a large research vessel, which leads to high costs and a limitation of potential areas of use [
29].
Within the last twenty years, due to the developments in various different fields like microcontrollers or 3D printing, small observational ROVs have become affordable and available to the public [
32]. Due to the low price, the easier set up, and their availability, small ROVs have recently been used in various fields of research, including fish length estimation [
33], ecological surveys [
32], photogrammetric surveys [
34], or water quality surveys [
35].
Depending on the intended application, precise estimations of the ROV’s position during the surveys are required [
35]. In robotic applications, global navigation satellite systems (GNSS) are usually applied to obtain precise global position information. However, electromagnetic signals of such systems cannot be received by submerged vehicles [
36]. In the past, different methods for the localisation of submerged ROVs have been proposed. These methods can be classified into inertial or dead reckoning methods, acoustic methods, and geophysical methods [
37].
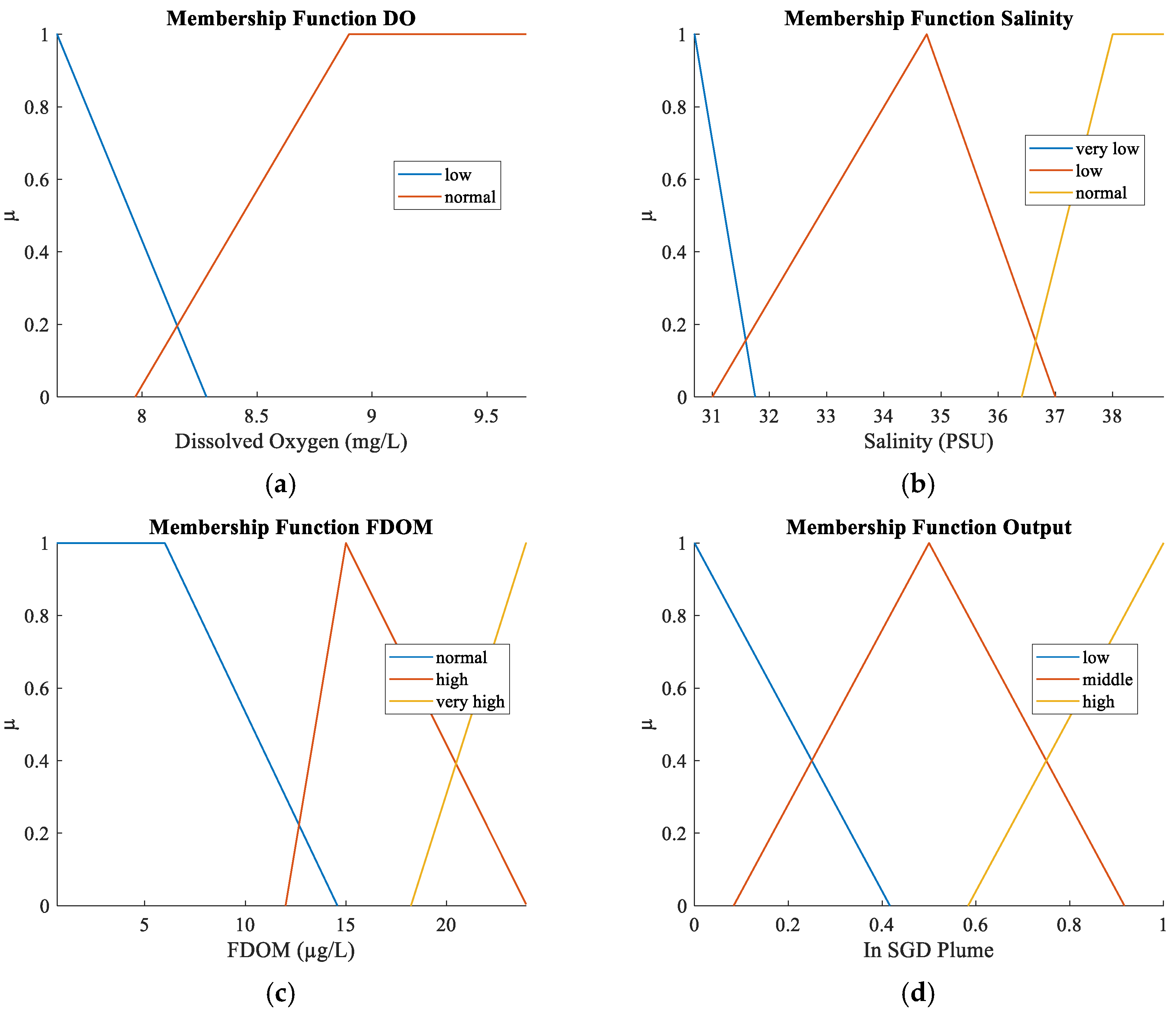
The multi-sensor system developed in this work carries a set of seven different sensors. During a survey, it might happen that only a subset of the sensors deployed indicate an occurrence of an SGD, while the others do not. In these cases, fusion of different sensor readings might help to identify potential SGD plumes. Different approaches for sensor fusion have been proposed in the past [
38,
39]. However, in this research, fuzzy logic [
40] is used for the fusion and joint interpretation of salinity, DO and FDOM values. The approach suggested by Mamdani [
41] is regularly used to build fuzzy logic systems. In his approach, the rule base, provided by an expert, is given as a set of if–then statements [
42]. The use of fuzzy logic requires the definition of several membership-functions for all inputs and outputs, and a set of rules operating on the defined membership functions of the input variables, calculating the output value.
In the past, fuzzy logic has been applied to a vast number of problems in a variety of different fields. These, for instance, include: control-theory [
41], crack detection in beams [
43], fire detection in engines and batteries [
44], pavement section classification [
45], characterisation of large changes in wind power [
46], path planning and obstacle avoidance of mobile unmanned robots [
47,
48], and analysing the effect of traffic noise on the human work efficiency [
42].
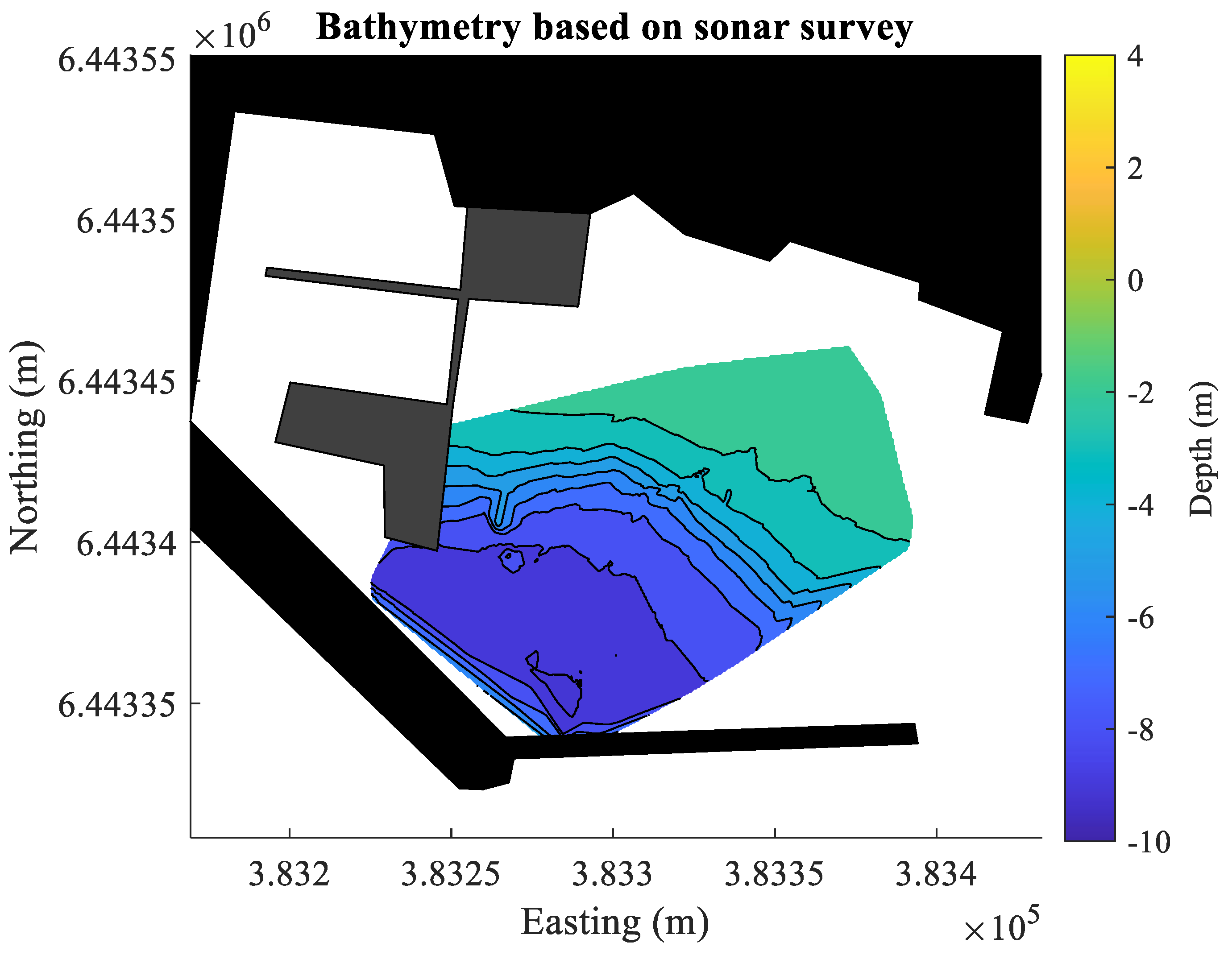
This paper will address the following research questions: (1) can recreational sonars be used for the identification and investigation of the spatial distribution of SGD plumes? (2) To what extent can a low-cost observational ROV, equipped with low-cost sensors be used for the identification and in situ investigation of focused SGD plumes? (3) Can the application of fuzzy logic increase the ability of identifying SGDs using in situ data sampled by ROVs?




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}