
Abstract
Despite the importance of cosine and cotangent function- based similarity measures, the literature has not provided a satisfactory formulation for the case of q-rung orthopair fuzzy set (qROFS). This paper criticizes the existing attempts in terms of respect of the basic axioms of a similarity measure and strict inclusion relation. In addition, the maximum operator-based similarity measures are criticized. Then, new improved, axiomatically supported cosine and cotangent function-based similarity measures for qROFSs are proposed. Additional properties of the new similarity measures are discussed to guarantee their good performance. Two algorithmic procedures of TOPSIS method that based on fixed and relative ideal solutions are discussed. The numerical examples are provided to support the findings
Similar content being viewed by others


Introduction
Fuzziness, as developed in [1], is a kind of uncertainty which appears often in human decision-making problems. The fuzzy set theory deals with daily life uncertainties successfully. The membership degree is assigned to each element in a fuzzy set. The membership degrees can effectively be taken by fuzzy sets. However, in real-life situations, the non-membership degrees should be considered in many cases as well, and it is not necessary that the non-membership degree be equal to the one minus the membership degree. Thus, Atanassov [2] introduced the concept of intuitionistic fuzzy set (IFS) that considers both membership and non-membership degrees. Here the non-membership degree is not always obtained from a membership degree, which leads to the concept of hesitancy degree. For each element, the sum of its membership \({(\xi )}\), non-membership \({(\nu )}\), and hesitancy \({(\pi )}\) degrees should be equal to one for IFSs, that is
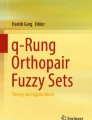
Condition (1) suggests that the region to choose membership and non-membership degrees is a proper subset of \({[0,1]\times [0,1]}\). Although IFS has been implemented in numerous areas, there were issues. Especially, when a decision maker provides such types of information but the sum of membership and non-membership degrees exceeds 1, then the IFS is not able to cope with it. For this reason, the theory of Pythagorean fuzzy set (PyFS) was proposed by Yager [3, 4] by modifying the ideology of IFS. Moreover, a PyFS contains two grades that are called truth (membership) and falsity (non-membership), with a rule that is: the sum of the squares of both grades is restricted to the unit interval. PyFS has been implemented in numerous areas, but there were issues, when a decision maker provides such types of information whose sum of the squares is exceeded from the unit interval, then the PyFS is not able to cope with it. For this reason, the theory of q-rung orthopair fuzzy set (qROFS) was proposed by Yager by modifying the ideology of PyFS [5,6,7]. Moreover, a qROFS contains two grades are called truth and falsity with a rule that is the sum of the \({q^{th}}\) power of both grades is restricted to the unit interval. qROFS has been implemented in numerous areas due to its ability to handle uncertain information more effectively [8,9,10,11,12,13,14,15,16,17,18,19,20,21,22, 24]. It provides the more space to choose orthopair for representing the information than IFSs and PyFSs. It provides the more space to choose orthopair for representing the information than IFSs and PyFSs (see Fig. 1).
While dealing with real life situations qROFSs provide more flexible ways to define membership and non-membership grades for the elements of a set. That is why now a day many researchers are showing keen interest in qROFSs. The MCDM method based on normalized bidirectional projection model and generalized knowledge-based entropy measure in q-rung orthopair fuzzy environment was discussed by Liu et al. [25]. The stock investment evaluation problem was discussed with respect to decision-theoretic rough set model with q-rung orthopair fuzzy information by Tang et al. [26]. The associated probabilities’ aggregations operators in interactive MCDM problems were defined by Sirbiladze [27]. The additive consistency-based priority generating method of q-rung orthopair fuzzy preference relation was extended by Zhang et al. [28]. Krishankumar et al. [30] debated the renewable energy source selection problems using qROFSs. The hybrid aggregation operator-based TOPSIS method for qROFSs was extended by Riaz et al. [33]. Zhang and Chen [34] proposed the method to solve the group decision making with incomplete q-rung orthopair fuzzy preference relations. Liu and Huang [35] discussed the consensus reaching process for fuzzy behavioral TOPSIS method with probabilistic linguistic q-rung orthopair fuzzy set based on correlation measure. The superiority and inferiority ranking methods to solve multiple attribute decision making problems within the q-rung orthopair fuzzy environment was extended by Zhu et al. [36]. Recently, Khan et al. [37] discussed the theoretical justifications of empirically successful VIKOR method.

Comparison of IFS, PyFS and qROFSs \({(q=3,10)}\)
To measure the similarity between any form of data is an important topic. The measures used to find the resemblance between data is called similarity measure. It has different applications in classification, medical diagnosis, pattern recognition, data mining, clustering, decision making, and in image processing. The qROF multi-parametric similarity measure and combinative distance-based assessment were used to assess the classroom teaching quality [38]. The distance, similarity, entropy, and inclusion measures for qROFSs were defined by Peng et al. [39]. The Minkowski distance measures (Hamming, Euclidean and Chebyshev distances) for qROFSs were discussed in [40]. A new dissimilarity measure was defined with a nice interpretation. The TOPSIS and ELECTRE were described based on this novel dissimilarity measure for qROFSs in [41].
The trigonometric functions plays an important rule for defining the similarity and dissimilarity measures. In the following, the cosine and cotangent function-based similarity measures for qROFSs were discussed by Wang et al. [43]. They have discussed ten different similarity measures and their weighted versions. To remove the shortcomings of cosine similarity measure, Liu et al. [44] combined cosine similarity and Euclidean distance measures for qROFSs and discussed TOPSIS method.
The positive and negative ideal solutions are the best available and worst avoidable solutions in MCDM problems. The TOPSIS (technique for order preference by similarity to an ideal solution) method was presented by Chen and Hwang [45]. This method finds the solution which is closest to the positive ideal solution and farthest from the negative ideal solution. The TOPSIS method in q-rung orthopair fuzzy environment was already presented by Pinar and Boran [41] and Liu et al. [44]. The reason to reconsider this decision method again is the shortcomings in their defined similarity measures.
Problem formulation: For any two qROFSs \({ A = ( \xi _{A},\nu _{A} )}\) and \({ B = ( \xi _{B},\nu _{B} )}\), the inclusion relation is defined as: \( { A \subseteq B \Longleftrightarrow \xi _{A} \le \xi _{B} \; \& \; \nu _{A} \ge \nu _{B} }\). In the same way, the inclusion relation for three qROFSs \({ A,\;B}\), and C, where \({C = ( \xi _{C},\nu _{C} )}\), is defined as: \({\mu _{A} \le \mu _{B} \le \mu _{C}}\) and \(\nu _{A} \ge \nu _{B} \ge \nu _{C}\).
To understand the problem, we discriminate the different situations in inclusion relation for three qROFSs as follows:
Equal case: \({\mu _{A} = \mu _{B} = \mu _{C}}\) and \({\nu _{A} = \nu _{B} = \nu _{C}}\), that is, \({A = B = C}\). Strictly included cases: \({\mu _{A}< \mu _{B} < \mu _{C}}\) and \({\nu _{A} \ge \nu _{B} \ge \nu _{C}}\) or \({\mu _{A} \le \mu _{B} \le \xi _{C}}\) and \(\nu _{A}> \nu _{B} > \nu _{C}\).
The similarity measure of two qROFSs is non-negative, symmetric, and becomes one when they coincide. In addition, it increases when two sets become more identical. The first three characteristics are easy to analytically formulate and the fourth property uses the fact that if there exists an inclusion relation between three qROFSs then the similarity between extreme should be less than the similarity between means. Mathematically, for three qROFSs \({ A,\;B}\), and C with \({A \subseteq B \subseteq C}\) and a similarity measure (Sim), then
A measure of similarity between qROFSs considers all the axioms of the similarity measure. It is important for a similarity measure to discriminate between the two above-mentioned situations (that is, equal and strictly included cases).
Motivation: We have seen that the existing cosine and cotangent function-based similarity measures have no ability to discriminate between equal and strictly included cases. That is, it is possible for them to have equality in (2) for strictly included cases. In addition, motivation behind the origination of fuzzy and non-standard fuzzy models is their intimacy with human thinking. Therefore, if a similarity measure does not meet some cognitive aspect, we call it as a counter intuitive case.
Aims and objectives: The aim of this study to present new similarity measures based on cosine and cotangent functions that would clearly discriminate the equal and strictly included situations. In addition, to propose the TOPSIS method for qROFSs using the newly define similarity measures. To improve the notion, we propose modified similarity measures based on cosine and cotangent functions for qROFSs. The new similarity measures clearly differentiate between equal and strictly included cases. That is, the inequality in (2) becomes equality for the equal case and there is strict inequality in (2) for the strictly included cases. In addition, the two algorithmic procedures based on fixed and relative ideal solutions are proposed for the TOPSIS method.
The remaining article is structured as follows: Basic definitions are mentioned in the next section. The existing similarity measures based on cosine and cotangent functions are criticized in the following section. The improved cosine and cotangent function- based similarity measures for qROFSs and their properties are discussed in the next section. Two algorithmic procedures for TOPSIS method and the numerical example are discussed in the following sections, respectively. The comparison and concluding remarks are debated in the last sections, respectively.
Preliminaries
This section contains the definitions of fuzzy set, IFS, PyFS and qROFS. Let \({Y=\{y_{1},y_{2},\ldots ,y_{n} \}}\) and \(C=\{c_{1},c_{2},\ldots , c_{n} \}\) stand for non-empty, discrete and finite universal set and the criteria set, respectively.
Definition 1
[1] A fuzzy set R on a universal set Y is defined as
where \({\xi _{R}: Y\rightarrow [0,1]}\) is a membership degree.
Definition 2
[2] An IFS R on a universal set Y is defined as
where \({\xi _{R}: Y\rightarrow [0,1]}\) is a membership function and \(\nu _{R}: Y\rightarrow [0,1]\) is a non-membership function, with the constraint \( {\xi _{R}(y)}+{\nu _{R}(y)} \le 1\) for each \({y \in Y}\). The quantity \({\pi _{R}(y)=1-(\xi _{R}(y)+\nu _{R}(y)) }\) is called the hesitancy degree of the element \({y \in Y}\).
Definition 3
[3, 4] A PyFS R on a universal set Y is defined as
where \({\xi _{R}: Y\rightarrow [0,1]}\) and \({\nu _{R}: Y\rightarrow [0,1]}\) are the membership and non-membership degrees under constraint \( {\xi _{R}^{2}(y)}+{\nu _{R}^{2}(y)} \le 1\), respectively. The quantity \(\pi _{R}(y)=\sqrt{1-(\xi _{R}^{2}(y)+\nu _{R}^{2}(y)) }\) is called the hesitancy degree of the element \({y \in Y}\).
In qROFSs, the term “rung” is used synonymously with the term “level” and the parameter q is any real number that is greater than or equal to one.
Definition 4
[5, 6] The membership \({(\xi _{R})}\) and non-membership \({(\nu _{R})}\) functions from the universal set to the unit interval, with the condition \({\xi _{R}^{q}(y)+\nu _{R}^{q}(y) \le 1}\) for each \({y \in Y}\), define the qROFS R over a universal set Y as follows:
The hesitancy index of the element \({y \in Y}\) is defined as \({\pi _{R}(y)=\left( 1-\xi _{R}^{q}(y)-\nu _{R}^{q}(y) \right) ^{1/q} }\). For a single \({y \in Y}\), the triple \({r=(y,\xi _{R}(y),\nu _{R}(y) ) \in R}\) is called a q-rung orthopair fuzzy value (qROFV). When there is no confusion, we write qROFV r as \({(\xi _{r},\nu _{r} )}\) instead of \({(y,\xi _{R}(y),\nu _{R}(y) )}\).
Henceforth, \({R_{1},R_{2}, R_{3},\ldots }\) represent qROFSs on Y, and the set of all qROFSs on Y will be denoted as qR(Y).
Definition 5
[5, 6] For two qROFVs \({ r_{1} = ( \xi _{r_{1}},\nu _{r_{1}} )}\) and \({ r_{2} = ( \xi _{r_{2}},\nu _{r_{2}} )}\), the following operations are defined:
-
The complement operation: \({ r_{1}^{c}= ( \nu _{r_{1}},\xi _{r_{1}} ) }\)
-
The partial order: \( { r_{1} \subseteq r_{2} \Longleftrightarrow \xi _{r_{1}} \le \xi _{r_{2}} \; \& \; \nu _{r_{1}} \ge \nu _{r_{2}} }\)
-
The max operation: \({ r_{1} \vee r_{2} = ( \max \{\xi _{r_{1}},\xi _{r_{2}} \}, \min \{\nu _{r_{1}},\nu _{r_{2}} \} ) }\)
-
The min operation: \({ r_{1} \wedge r_{2} = ( \min \{\xi _{r_{1}},\xi _{r_{2}} \}, \max \{\nu _{r_{1}},\nu _{r_{2}}\} ) }\)
To conclude this section, we recall the axiomatic definition of similarity measure for qROFSs.
Definition 6
A similarity measure between qROFSs on Y is a mapping \({ \mathrm{Sim}: qR(Y) \times qR(Y) \rightarrow [0,1]} \) that satisfies the following properties:
-
(S1)
\({0 \le \mathrm{Sim}(R_{1},R_{2}) \le 1} \), where \({R_{1},R_{2}\in qR(Y)}\).
-
(S2)
\({\mathrm{Sim}(R_{1},R_{2})=1 \Longleftrightarrow R_{1}=R_{2}} \).
-
(S3)
\({\mathrm{Sim}(R_{1},R_{2})=\mathrm{Sim}(R_{2},R_{1}) }\).
-
(S4)
If \({R_{1} \subseteq R_{2} \subseteq R_{3}}\), then \({\mathrm{Sim}(R_{1},R_{3}) \le \mathrm{Sim}(R_{1},R_{2})}\) and \({\mathrm{Sim}(R_{1},R_{3})\le \mathrm{Sim}(R_{2},R_{3})}\), for every \({R_{3}\in qR(Y)}\).
The authors in [41, 44] tried to define the similarity measures based on cosine and cotangent functions for qROFSs. However, some of the proposed similarity measures do not hold the axiom (S4) of Definition 6 and all of them cannot differentiate the equal and strictly included cases, as discussed in the next section. This drawback motivates us to propose a better tool with the core of performance in “Improved cosine and cotangent function-based similarity measures”.
Review of existing cosine and cotangent function-based similarity measures for qROFSs
In this section, we mention the existing cosine and cotangent function-based similarity measures for qROFSs. The counter-intuitive cases are discussed. The counter-intuitive cases are based on the fact that the similarity of relatively similar qROFSs should be greater than the similarity of less similar qROFSs. In addition, the existing cosine and cotangent function-based similarity measures have no ability to discriminate between equal and strictly included cases. That is, it is possible for them to have equality in (2) for strictly included cases. Analysis is given about the inappropriateness of the maximum operator technique for similarity measures.
Wang et al. [43] expounded the cosine and cotangent function-based similarity measures for qROFSs.
Definition 7
The cosine and cotangent function-based similarity measures for qROFSs were defined as follows:
The similarity measures \({S_{c}^{1}}\), \({S_{c}^{3}}\), \({S_{c}^{4}}\), \({S_{c}^{5}}\) and \({S_{c}^{6}}\) were defined without considering hesitancy index. We know that the third parameter is calculated from the two parameters (membership and non-membership degrees), but the third parameter is important while calculating the similarity or dissimilarity measures between two qROFVs. Thus, leave the hesitancy index will an important part of information. By analysis, we can see that why third parameter is important. Let us verify if we can discard the values of the third parameter, we have
The inequality (3) ensures that the results are not same when we discard the hesitancy index for \({S_{c}^{3}}\), \({S_{c}^{4}}\), \({S_{c}^{5}}\) and \({S_{c}^{6}}\). Similarly, it can be easily seen that the term \({\eta _{R_{1}}^q(y_{j})\times \eta _{R_{2}}^q(y_{j}) }\) is not the constant multiple of the first two terms in \({S_{c}^{1}}\).
In the following, we shall observe that the most of the existing cosine similarity measures not differentiate the equal and strictly included cases. The MCDM methods based on these similarity measures compromise the quality and lose their reliability, because these measures have not an ability to discriminate between equal and strictly included cases. To understand completely, we provide some explanatory examples.
Example 1
Consider three qROFSs \({R_{1}}\), \({R_{2}}\) and \({R_{3}}\) (for \({q=3}\)) on \({Y=\{y_{1},y_{2},y_{3} \}}\), such that
then \({R_{1} \subseteq R_{2} \subseteq R_{3}}\) with especially \(\nu _{R_{1}}(y_{i})> \nu _{R_{2}}(y_{i}) > \nu _{R_{3}}(y_{i})\), but \({S(R_{1},R_{2}) = S(R_{1},R_{3})}\), where S represents the similarity measure in Table 1. It is evident from Table 1 that the most of the existing similarity measures that based on the cosine and cotangent functions give us the equal similarity for strict inclusion cases.
Example 2
Consider three qROFSs \({R_{1}}\), \({R_{2}}\) and \({R_{3}}\) (for \({q=3}\)) on \({Y=\{y_{1},y_{2},y_{3} \}}\), such that
then \({R_{1} \subseteq R_{2} \subseteq R_{3}}\) with especially \(\xi _{R_{1}}(y_{i})< \xi _{R_{2}}(y_{i}) < \xi _{R_{3}}(y_{i})\), but \({S(R_{2},R_{3}) = S(R_{1},R_{3})}\), where S represents the similarity measure in Table 2. It is evident from Table 2 that the most of the existing similarity measures that based on the cosine and cotangent functions give us the equal distance for strict inclusion cases.
Remark 1
Is maximum operator suitable to define similarity measures?
In the following analysis, we observe that the maximum operator- based similarity measures are not suitable for practical applications. The reliability and validity of any similarity measure depend on axioms of Definition 6. If for a similarity measure, any axiom not satisfies, then it is not valid and reliable. The first three axioms of Definition 6 are straightforward but the fourth axiom is not. Now, we can see that the maximum operator remains ineffective for different situations and thus not a reliable way to define the similarity measure. For three distinct qROFSs, we have
Then, the following inequality obtained
The inequality 4 have greater than or equal to symbol and a reliable technique should differentiate the equal and unequal cases. Equality holds for equal qROFSs and inequality for distinct qROFSs. If there is no discrimination between these two cases, then the technique is not reliable and valid for practical applications.
But we have seen different situations for which the equality holds for distinct qROFSs. For three distinct qROFSs with \({R_{1} \subseteq R_{2} \subseteq R_{3}}\), we have the following counter-intuitive situations.
-
1.
If \({\xi _{R_{1}}< \xi _{R_{2}} < \xi _{R_{3}}}\) and \({\nu _{R_{3}} < \nu _{R_{2}} = \nu _{R_{1}}} \) with \(\left| \xi _{R_{1}}-\xi _{R_{3}}\right| < \left| \nu _{R_{1}}-\nu _{R_{3}}\right| \). Then, for three distinct qROFSs, inequality (4) becomes equality.
-
2.
If \({\xi _{R_{1}}< \xi _{R_{2}} < \xi _{R_{3}}}\) and \({\nu _{R_{3}} = \nu _{R_{2}} < \nu _{R_{1}}} \) with \(\left| \xi _{R_{1}}-\xi _{R_{3}}\right| < \left| \nu _{R_{1}}-\nu _{R_{3}}\right| \). Then, for three distinct qROFSs, inequality (4) becomes equality.
-
3.
If \({\xi _{R_{1}} = \xi _{R_{2}} < \xi _{R_{3}}}\) and \({\nu _{R_{3}}< \nu _{R_{2}} < \nu _{R_{1}}} \) with \(\left| \xi _{R_{1}}-\xi _{R_{3}}\right| > \left| \nu _{R_{1}}-\nu _{R_{3}}\right| \). Then, for three distinct qROFSs, inequality (4) becomes equality.
-
4.
If \({\xi _{R_{1}} < \xi _{R_{2}} = \xi _{R_{3}}}\) and \({\nu _{R_{3}}< \nu _{R_{2}} < \nu _{R_{1}}} \) with \(\left| \xi _{R_{1}}-\xi _{R_{3}}\right| > \left| \nu _{R_{1}}-\nu _{R_{3}}\right| \). Then, for three distinct qROFSs, inequality (4) becomes equality.
Thus, the above-mentioned cases reveal that this technique is not valid and reliable for practical applications and the similarity measures \({S_{c}^{2}}\), \({S_{c}^{4}}\), \({S_{c}^{7}}\) and \({S_{c}^{9}}\) are based on this technique.
Liu et al. [44] defined similarity measure as a combination of cosine similarity and Euclidean dissimilarity measures for qROFSs.
Definition 8
Let \({R_{1}}\) and \({R_{2}}\) be two qROFSs in Y. Then, the similarity measure between \({R_{1}}\) and \({R_{2}}\) is defined as follows:
where
There are some deficiencies in Definition 8 which should be removed for making the similarity measure more effective for qROFSs.
Example 3
Let \({ R_{1}=(0,0)}\), \({ R_{2}=(1,0)}\) and \({ R_{3}=(0,1)}\) be three qROFSs in Y. Then, the similarities between them are:
Remark 2
From above example, we have seen that we cannot find similarity from the point \({ R_{1}=(0,0)}\). Actually, for any arbitrary qROFV, we cannot find the similarity from the point (0, 0).
For calculating similarity and dissimilarity measures, Liu et al. [44] used two parameters only, i.e., membership and non-membership degrees. They have not considered the hesitancy index while defining similarity measure. Since we know that it carry an important information, so leaving hesitancy index for similarity measures is not a good idea. By analysis, we can see that why third parameter is important. Let us verify if we can discard the values of \( \eta \) from (7), we have
Since \( {2 \left( \xi _{R_{2}}^q(y_{j})-\xi _{R_{1}}^q(y_{j})\right) \left( \nu _{R_{2}}^q(y_{j})-\nu _{R_{1}}^q(y_{j})\right) \ne 0 }\) in general. Hence, with the hesitation margin the result is not the constant multiple of the (7). Therefore, by ignoring the hesitation margin the result will be influenced. In addition, by adding the hesitancy index in (6) the result is not the constant multiple of the (6). Hence, the overall result will be influenced by ignoring the hesitancy degree.
Improved cosine and cotangent function-based similarity measures
In this section, we define improved cosine and cotangent function- based similarity measures. Additional properties of newly propose similarity measures are discussed. In the previous section, we have seen that for distinct qROFSs, the similarity values are equal, that is, the two situations when sets are equal and are not equal cannot differentiate by existing cosine or cotangent function-based similarity measures. The improved similarity measure clearly differentiate the two situations of equal and unequal cases (strict inclusion).
The inclusion relation discussed in Definition 5 is a partial order and the condition (S4) in Definition 6 is based on this inclusion relation. However, the inclusion relation in Definition 5 not differentiate equal and unequal cases. Therefore, we define the new partial order for qROFVs.
Definition 9
Let \({R_{1}}\) and \({R_{2}}\) be two qROFSs in Y. Then, the total inclusion between \({R_{1}}\) and \({R_{2}}\) is defined as
The situation in (8) is more clear, convincing and conveying more information than situation discussed in Definition 5, when \({R_{1}\subseteq R_{2}}\). We will see that the total inclusion relation refines the similarity measures for qROFSs.
The condition (S2) in Definition 6 deals with the situation when two qROFVs are equal (Case 1 in (8)). Thus, we consider second and third cases in (8) as follows:
Based on this new inclusion relation defined in (9), we modified the fourth axiom of similarity measure as follows.
Definition 10
An improved similarity measure between two qROFSs \({R_{1}}\) and \({R_{2}}\) is a mapping \({ S: R_{1} \times R_{2} \rightarrow [0,1]} \), which satisfies the following properties:
-
(MS1)
\({0 \le S(R_{1},R_{2}) \le 1} \).
-
(MS2)
\({S(R_{1},R_{2})=1 \Longleftrightarrow R_{1}=R_{2}} \).
-
(MS3)
\({S(R_{1},R_{2})=S(R_{2},R_{1}) }\).
-
(MS4)
For all \({ R_{1},R_{2},R_{3} \in qROFSs}\), if \({R_{1} \sqsubset ^{t} R_{2} \sqsubset ^{t} R_{3}}\) then
$$\begin{aligned} { S(R_{1},R_{3}) \;<\; \max \left\{ S(R_{1},R_{2}), S(R_{2},R_{3}) \right\} } \end{aligned}$$
Any similarity measure that fulfills (MS4) also satisfies (S4) but the converse is not true. Thus, an improved similarity measure is also a similarity measure but a similarity measure not necessarily to be an improved similarity measure.
Definition 11
For two qROFSs \({R_{1}}\) and \({R_{2}}\) in Y, a cosine function-based similarity measure between \({R_{1}}\) and \({R_{2}}\) is define as follows:
For any two qROFVs \({\rho =(\xi _{\rho },\nu _{\rho })}\) and \({\sigma =(\xi _{\sigma },\nu _{\sigma })}\), the (10) becomes
Theorem 1
The function \({S_{q}}\) defined in (10) is an improved similarity measure.
Proof
To complete this proof, we need to verify conditions (MS1–MS4) of Definition 10 for \({S_{q}}\). Let \({Y =\{y\}}\) and \({R=\{(y,\xi ,\nu ) \}}\) be an arbitrary qROFS and \({\Psi =\{(y,\xi _{\Psi },\nu _{\Psi }) \} }\) be any particular qROFS in Y. \({S_{q}}\) has characteristic function h, which can be represented as
-
(MS1)
Since we have \({0\le \left| \xi ^{q}-\xi _{\Psi }^{q}\right| \le 1}\), \({0\le \left| \nu ^{q}-\nu _{\Psi }^{q}\right| \le 1}\) and \({\frac{1}{2}\le 1 - \frac{1}{2} \left| \pi ^{q}-\pi _{\Psi }^{q}\right| \le 1}\). Then, it is easy to see
$$\begin{aligned} {0\le h(\xi ,\nu ) }&{ \le 1} \end{aligned}$$ -
(MS2)
For two qROFs R and \({\Psi }\), the characteristic function h satisfies
$$\begin{aligned} {h(\xi ,\nu )=1\;\Leftrightarrow \; R=\Psi , } \end{aligned}$$If \({h(\xi ,\nu )=1}\) then from (12),
$$\begin{aligned}&\mathrm{Cos} \left[ \frac{\pi }{4} \left( \left| \xi ^{q}-\xi _{\Psi }^{q}\right| + \left| \nu ^{q}-\nu _{\Psi }^{q}\right| \right) \right. \nonumber \\&\quad \times \left. \left( 1- \frac{1}{2} \left| (\xi ^{q}+\nu ^{q})-(\xi _{\Psi }^{q}+\nu _{\Psi }^{q}) \right| \right) \right] =1 \nonumber \\&\frac{\pi }{4} \left( \left| \xi ^{q}-\xi _{\Psi }^{q}\right| + \left| \nu ^{q}-\nu _{\Psi }^{q}\right| \right) \nonumber \\&\quad \times \left( 1- \frac{1}{2} \left| (\xi ^{q}+\nu ^{q})-(\xi _{\Psi }^{q}+\nu _{\Psi }^{q}) \right| \right) = 0 \nonumber \\&\left( \left| \xi ^{q}-\xi _{\Psi }^{q}\right| + \left| \nu ^{q}-\nu _{\Psi }^{q}\right| \right) \nonumber \\&\quad \times \left( 1- \frac{1}{2} \left| (\xi ^{q}+\nu ^{q})-(\xi _{\Psi }^{q}+\nu _{\Psi }^{q}) \right| \right) = 0 \end{aligned}$$(13)Equation (13) will satisfy only when \( \left| \xi ^{q}-\xi _{\Psi }^{q}\right| + \left| \nu ^{q}-\nu _{\Psi }^{q}\right| =0 \) or \( \left( 1 - \frac{1}{2} \left| \pi ^{q}-\pi _{\Psi }^{q}\right| \right) =0\). However, \( \left( 1 - \frac{1}{2} \left| \pi ^{q}-\pi _{\Psi }^{q}\right| \right) \ne 0\) and thus \( \left( \left| \xi ^{q}-\xi _{\Psi }^{q}\right| \right. \left. + \left| \nu ^{q}-\nu _{\Psi }^{q}\right| \right) =0 \). This is only possible when \({\xi =\xi _{\Psi }}\) and \({\nu =\nu _{\Psi }}\) and hence \({R=\Psi }\). The sufficient condition is straightforward.
-
(MS3)
Symmetric property for h is easy to prove.
-
(MS4)
To complete the proof, we separately treat the two conditions: Case 1. \({\xi _{\Psi }^{q}+\nu _{\Psi }^{q} \le \xi ^{q}+\nu ^{q}}\). Case 2. \({\xi _{\Psi }^{q}+\nu _{\Psi }^{q} > \xi ^{q}+\nu ^{q}}\). For Case 1 with \({\xi _{\Psi } \le \xi }\) and \({\nu _{\Psi } \ge \nu }\), (12) is reduce to
$$\begin{aligned} {h(\xi ,\nu )}&=\mathrm{Cos} \Bigg [\frac{\pi }{4} \Bigg (\Bigg (\xi ^q-\xi _{\Psi }^q\Bigg )+\Bigg (\nu _{\Psi }^q-\nu ^q\Bigg )\Bigg ) \nonumber \\&\quad \times \Bigg (1-\frac{1}{2} \Bigg (\xi ^q+\nu ^q-\xi _{\Psi }^q-\nu _{\Psi }^q \Bigg )\Bigg )\Bigg ] \nonumber \\ h^{\prime }_{\xi } (\xi ,\nu )&= \frac{\partial h(\xi ,\nu )}{\partial \xi } \nonumber \\&=-\Bigg (\frac{\pi }{4} q \xi ^{q-1} \Bigg (\frac{1}{2} \Bigg (\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q-\xi ^q\Bigg )+1\Bigg )\nonumber \\&\quad -\frac{\pi }{8} q \xi ^{q-1} \Bigg (-\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q+\xi ^q\Bigg )\Bigg )\nonumber \\&\quad \times \; \mathrm{Sin} \Bigg [\frac{\pi }{4} \Bigg (-\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q+\xi ^q\Bigg )\nonumber \\&\quad \times \Bigg (1+\frac{1}{2} \Bigg (\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q-\xi ^q\Bigg )\Bigg )\Bigg ] \nonumber \\&=\frac{\pi }{4} q \xi ^{q-1} \Bigg (1+ \xi _{\Psi }^q-\xi ^q\Bigg ) \nonumber \\&\quad \mathrm{Sin} \Bigg [\frac{\pi }{8} \Bigg (2+\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q-\xi ^q\Bigg )\nonumber \\&\quad \Bigg (\xi _{\Psi }^q-\nu _{\Psi }^q+\nu ^q-\xi ^q\Bigg )\Bigg ] \nonumber \\&{ \le 0 } \end{aligned}$$(14)$$\begin{aligned} { h^{\prime }_{\nu } (\xi ,\nu )}&= { \frac{\partial h(\xi ,\nu )}{\partial \nu } } \nonumber \\&= \Bigg (\frac{\pi }{8} q \nu ^{q-1} \Bigg (-\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q+\xi ^q\Bigg )\nonumber \\&\quad +\frac{\pi }{4} q \nu ^{q-1} \Bigg ( 1+\frac{1}{2} \Bigg (\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q-\xi ^q\Bigg )\Bigg )\Bigg )\nonumber \\&\qquad \times \; \mathrm{Sin} \Bigg [\frac{\pi }{4} \Bigg (-\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q+\xi ^q\Bigg )\nonumber \\&\quad \Bigg (\frac{1}{2} \Bigg (1+\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q-\xi ^q\Bigg )\Bigg )\Bigg ] \nonumber \\&=-\frac{\pi }{4} q \nu ^{q-1} \Bigg (1+ \nu _{\Psi }^q-\nu ^q\Bigg ) \nonumber \\&\quad \mathrm{Sin} \Bigg [\frac{\pi }{8} \Bigg (2+\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q-\xi ^q\Bigg )\nonumber \\&\quad \Bigg (\xi _{\Psi }^q-\nu _{\Psi }^q+\nu ^q-\xi ^q\Bigg )\Bigg ] \nonumber \\&{ \ge 0 } \end{aligned}$$(15)The four real numbers \({\xi _{1}}\), \({\xi _{2}}\), \({\xi _{3}}\) and \({\nu ^{\prime }}\) are consider that satisfy \({\xi _{\Psi }< \xi _{1} < \xi _{2} \le 1}\), \({\xi _{3} = \frac{\xi _{1} + \xi _{2} }{2}}\) and \({0 \le \nu ^{\prime } \le \nu _{\Psi }}\). From (14), we have \({h^{\prime }_{\xi }(\xi _{1}) \le 0 }\) and \({\xi _{\Psi }< \xi _{1}<\xi _{3} < \xi _{2} \le 1}\), then we have \(h(\xi _{1},\nu ^{\prime })> h(\xi _{3},\nu ^{\prime }) > h(\xi _{2},\nu ^{\prime })\). This implies \({h(\xi _{1},\nu ^{\prime }) > h(\xi _{2},\nu ^{\prime })}\). Consequently, \({h(\xi ,\nu )}\) is a strictly decreasing function of \({\xi }\) when \({\xi _{\Psi } \le \xi }\) and \({\nu _{\Psi } > \nu }\). Similarly, using (15), we reach that the \({h(\xi ,\nu )}\) strictly increasing function of \({\nu }\). Now, we discuss Case 2 with \({\xi _{\Psi } \le \xi } \) and \({\nu _{\Psi } > \nu }\), we have
$$\begin{aligned}&{h(\xi ,\nu )}\nonumber \\&\quad =\mathrm{Cos} \Bigg [\frac{\pi }{4} \Bigg (\Bigg (\xi ^q-\xi _{\Psi }^q\Bigg )+\Bigg (\nu _{\Psi }^q-\nu ^q\Bigg )\Bigg ) \nonumber \\&\qquad \times \Bigg (1-\frac{1}{2} \Bigg (\xi _ {\Psi }^q+\nu _{\Psi }^q-\nu ^q-\xi ^q\Bigg )\Bigg )\Bigg ] \nonumber \\&\quad { h^{\prime }_{\xi } (\xi ,\nu )} {= \frac{\partial h(\xi ,\nu )}{\partial \xi } } \nonumber \\&\quad =-\Bigg (\frac{\pi }{8} q \xi ^{q-1} \Bigg (-\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q+\xi ^q\Bigg )\nonumber \\&\quad +\frac{\pi }{4} q \xi ^{q-1} \Bigg (1+\frac{1}{2} \Bigg (-\xi _{\Psi }^q-\nu _{\Psi }^q+\nu ^q+\xi ^q\Bigg )\Bigg )\Bigg ) \nonumber \\&\qquad \mathrm{Sin} \times \Bigg [\frac{\pi }{4} \Bigg (-\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q+\xi ^q\Bigg )\nonumber \\&\qquad \Bigg (1+\frac{1}{2} \Bigg (-\xi _{\Psi }^q-\nu _{\Psi }^q+\nu ^q+\xi ^q\Bigg )\Bigg )\Bigg ] \nonumber \\&\quad =-\frac{\pi }{4} q \xi ^{q-1} \Bigg (1-\xi _{\Psi }^q+\xi ^q\Bigg )\nonumber \\&\quad Sin \Bigg [\frac{\pi }{8} \Bigg (\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q-\xi ^q-2\Bigg )\nonumber \\&\quad \Bigg (\xi _{\Psi }^q-\nu _{\Psi }^q+\nu ^q-\xi ^q\Bigg )\Bigg ] \nonumber \\&\quad { \le 0 } \end{aligned}$$(16)$$\begin{aligned}&{ h^{\prime }_{\nu } (\xi ,\nu )} = { \frac{\partial h(\xi ,\nu )}{\partial \nu } } \nonumber \\&\quad =-\Bigg (\frac{\pi }{8} q \nu ^{q-1} \Bigg (-\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q+\xi ^q\Bigg )\nonumber \\&\quad -\frac{\pi }{4} q \nu ^{q-1}\nonumber \\&\quad \Bigg (1+\frac{1}{2} \Bigg (-\xi _{\Psi }^q-\nu _{\Psi }^q+\nu ^q+\xi ^q\Bigg )\Bigg )\Bigg )\nonumber \\&\quad \qquad \times \mathrm{Sin} \Bigg [\frac{\pi }{4} \Bigg (-\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q+\xi ^q\Bigg )\nonumber \\&\quad \Bigg (1+\frac{1}{2} \Bigg (-\xi _{\Psi }^q-\nu _{\Psi }^q+\nu ^q+\xi ^q\Bigg )\Bigg )\Bigg ] \nonumber \\&\quad =\frac{\pi }{4} q \nu ^{q-1} \Bigg (1-\nu _{\Psi }^q+\nu ^q\Bigg ) \nonumber \\&\quad Sin \Bigg [\frac{\pi }{8} \Bigg (\xi _{\Psi }^q+\nu _{\Psi }^q-\nu ^q-\xi ^q-2\Bigg )\nonumber \\&\quad \Bigg (\xi _{\Psi }^q-\nu _{\Psi }^q+\nu ^q-\xi ^q\Bigg )\Bigg ] \nonumber \\&\quad { \ge 0 } \end{aligned}$$(17)
Using (16) and (17) and the same procedure as in condition first, we prove that \({h(\xi ,\nu )}\) is a strictly decreasing function of \({\xi }\) and strictly increasing function of \({\nu }\). In addition, with the conditions \({\xi _{\Psi } \ge \xi }\) and \({\nu _{\Psi } < \nu } \) in Case 1 & Case 2, we can easily prove that \({h(\xi ,\nu )}\) is a strictly increasing function of \({\xi }\) and strictly decreasing function of \({\nu }\). Thus, the function \({S_{q}}\) based on cosine function is an improved similarity measure.
Similarly, it is not difficult to extend to any \(Y =\{y_{1},y_{2},\ldots ,y_{m}\}\). \(\square \)
It is important to discuss the situation when the membership degree is equal to the non-membership degree and the graphical representation of such situation is called an equal line. Each qROFVs on equal line have same membership and non-membership degrees.
Corollary 1
\({S_{q}}\) is a decreasing function on equal line from (1, 0).
Proof
Since we know that the membership degree is equal to non-membership degree on equal line. If we represent the qROFVs on equal line by \({\rho =(\xi ,\nu )}\) and (1, 0) by \({\sigma }\), then (11) becomes
The hesitancy index is maximum at (0, 0) and decreases on equal line and attains minimum at \({\xi ^{q}+\nu ^{q}=1}\). Thus, \({S_{q}}\) is a strictly decreasing on equal line. \(\square \)
Theorem 2
For each parallel line to equal line, the similarity measure \({S_{q}}\) is a decreasing function from (1, 0).
Proof
If we represents the any qROFV on parallel line by \({\rho =(\xi ,\nu )}\) and (1, 0) by \({\sigma }\), then from (11), we have
If the parallel line start from \({\xi }\)-axis, then \({(\xi ,0)}\) is the starting point and \({\eta ^{q}=1-\xi ^{q}}\). Then, (18) takes the form
Now, if we consider any point on line and denoted as \({(\xi +\Delta \xi ,\Delta \nu )}\), where \({\Delta }\xi \) and \({\Delta }\nu \) are the changes in first and second coordinates, respectively. Then, from (18) and (19), we have
Since the hesitancy index is maximum at \({(\xi ,0)}\) and decreases on the parallel line and attains minimum at \({\xi ^{q}+\nu ^{q}=1}\). Thus, \({S_{q}}\) is a strictly decreasing on the parallel line. \(\square \)
Definition 12
For two qROFSs \({R_{1}}\) and \({R_{2}}\) in Y, the weighted cosine function-based similarity measure between \({R_{1}}\) and \({R_{2}}\) is define as follows:
where \({w_{j}}\) are the weights with \({ w_{j} \ge 0}\) and \({\sum _{j=1}^{n} w_{j} = 1}\).
In the following, we use cotangent function to define the similarity measure. The propose similarity measure is the improve version of the existing similarity measures.
Definition 13
For two qROFSs \({R_{1}}\) and \({R_{2}}\) in Y, the cotangent function-based similarity measure between \({R_{1}}\) and \({R_{2}}\) is define as follows:
For any two qROFVs \({\rho =(\xi _{\rho },\nu _{\rho })}\) and \({\sigma =(\xi _{\sigma },\nu _{\sigma })}\), (21) becomes
Theorem 3
The function \({S_{q}^\mathrm{cot}}\) is an improved similarity measure.
Proof
The proof is similar to the proof of the Theorem 1. \(\square \)
Definition 14
For two qROFSs \({R_{1}}\) and \({R_{2}}\) in Y, the weighted cotangent function-based similarity measure between \({R_{1}}\) and \({R_{2}}\) is define as follows:
where \({w_{j}}\) are the weights with \({ w_{j} \ge 0}\) and \({\sum _{j=1}^{n} w_{j} = 1}\).
q-rung orthopair fuzzy TOPSIS (qROF-TOPSIS) method
We have seen from “Review of existing cosine and cotangent function-based similarity measures for qROFSs” that the existing similarity measures have counter intuitive cases and they not differentiate between equal and strictly included cases. We have provided the improved similarity measures based on cosine and cotangent functions in “Improved cosine and cotangent function-based similarity measures”. The proposed similarity measures have ability to differentiate between equal and strictly included cases. Thus, it is necessary to discuss the MCDM method based on improved similarity measures. In the following, we propose two algorithmic procedures for a well known TOPSIS method. The TOPSIS method gives a solution which is closest to the positive ideal solution and farthest to the negative ideal solution. The Algorithm 1 deals with fixed positive and negative ideal solutions, while Algorithm 2 based on relative positive and negative ideal solutions. The relative ideal solutions are based on the assessments of the alternatives against criteria and it vary as the preferences of the decision makers changes.
Let the set of alternatives and attributes (criteria) are represented by \({Y=\{ y_{1},y_{2},\ldots ,y_{m}\}}\) and \({C=\{ c_{1},\ldots ,c_{n}\}}\), respectively.


Numerical example
The data have very much importance for any organization and to secure the data is a key task for them. The organization have different business activities and to access of an organization system or data, the cyber attackers modified their attacking techniques every time. Thus, this is impossible for any organization to be completely sure that they are safe from cyber security threats or attacks. In the following, we use the qROF-TOPSIS method to resolve this issue. The issue is resolved upto extent that the organization know their most weaker point, where the cyber attackers can easily attack. We consider only four different techniques of cyber attackers, that is, computer viruses, spyware, denial-of-service (DoS) attacks and data breach, and represented as \({C=\{ c_{1},c_{2},c_{3},c_{4}\}}\). However, the method can be used for any number of cyber attacks techniques. If an organization have five different possible entrances, where attackers can attack, we can take as alternatives, and represented as \({Y=\{ y_{1},y_{2},y_{3},y_{4},y_{5}\}}\). Then, each alternative is assessed against each criterion and the information is secured as qROFSs, and display in Table 3. We solve this problem using proposed algorithms.
A. Algorithm 1 with weighted cosine function- based similarity measure: First we solve this problem using Algorithm 1 and weighted cosine function-based similarity measure defined in (20). Let the weight vector of the criteria is \({\omega =\{0.22,0.20,0.33,0.25\} }\). Since the FPIS and FNIS are defined as \({ y^{+} = \{ r_{j}^{+}=(1,0) \}}\) and \( y^{-} = \{ r_{j}^{-}=(0,1) \},\; (1 \le j \le 4) \). The similarity between each alternative and FPIS is calculated and represented as \(d_{i}^{+}=WS_{q}(y_{i},y^{+})\), and the similarity between each alternative and FNIS is calculated and represented as \(d_{i}^{-}=WS_{q}(y_{i},y^{-})\). The closeness index for each alternative is formulated using (24). The summary of the results is presented in Table 4. The maximum closeness index value is correspond to alternative \({y_{3}}\), and thus, the entrance \({y_{3}}\) is more sensitive for organization. The order of the alternatives using Algorithm 1 is \({y_{3}\succ y_{2} \succ y_{1}\succ y_{5}\succ y_{4}}\).
For different values of the parameter q \({( q\in \{1,2,\ldots ,10\})}\), the optimal alternative remain same. However, there is slight difference in the ranking of remaining alternatives. The closeness indexes and order of the alternatives are displayed in Table 5.
B. Algorithm 2 with weighted cosine function-based similarity measure: Now, we solve this problem by using Algorithm 2 and weighted cosine function- based similarity measure defined in (20). Let the weight vector of the criteria is \({\omega =\{0.22,0.20,0.33,0.25\} }\). The RPIS and RNIS are calculated using (25) and (26) as follows:
The similarity between each alternative and RPIS is calculated and represented as \({rd_{i}^{+}=WS_{q}(y_{i},y^{+})}\), and the similarity between each alternative and RNIS is calculated and represented as \({rd_{i}^{-}=WS_{q}(y_{i},y^{-})}\). The closeness index for each alternative is formulated using (24). The summary of the results is presented in Table 6. The maximum closeness index value is correspond to alternative \({y_{3}}\), and thus, the entrance \({y_{3}}\) is more sensitive for organization. The order of the alternatives by using Algorithm 1 is \({y_{3}\succ y_{2} \succ y_{5}\succ y_{1}\succ y_{4}}\).
For different values of the parameter q \({(q\in \{1,2,\ldots , 10\})}\), the optimal alternative remain same. However, there is slight difference in the ranking of remaining alternatives. The closeness indexes and order of the alternatives are displayed in Table 7.
Remark 3
We solve this problem by weighted cotangent function-based similarity measure defined in (23) and Algorithm 1. The weights of attributes and ideal solutions remain same. The optimal alternative by this setup remain same. The summary of the results for different values of the parameter q is displayed in Table 8.
In addition, the problem is solved using weighted cotangent function- based similarity measure in Algorithm 2. The alternative \({y_{3}}\) is the optimal alternative using \({WS_{q}^{cot}}\) in Algorithm 2. The summary of the results for different values of the parameter q is displayed in Table 9.
Remark 4
To compare our proposed MCDM method, we solve the above-mentioned problem by existing MCDM methods. The considered existing methods result optimal alternative \({y_{3}}\). The ranking of alternatives are slightly different with different methods. The summary of the comparison with existing methods displayed in Table 10.
Comparision analysis
In this section, we compare our propose similarity measures with existing ones. Our comparison method is somehow different from the literature, because the pattern recognition-based comparison provided in the literature. Our comparison analysis is based on the axioms of Definitions 6 and 10, and where the similarity measures are unable to find the similarity between qROFSs. Different authors defined the similarity measures for qROFSs. As the cosine and cotangent function-based similarity measures are already mentioned in “Review of existing cosine and cotangent function-based similarity measures for qROFSs”, so we mention here (Table 11) the similarity measures defined in [38,39,40,41].
-
Case I: The orthopairs \(R_{1}=(0.7,0.7)\), \({R_{2}=(0.9,0.6)}\) and \({R_{3}=(0.9,0.5)}\) are qROFVs for \({q=3}\) and \(R_{1}\sqsubset ^{t} R_{2}\sqsubset ^{t} R_{3}\) with \(\nu _{R_{1}}=0.7> \nu _{R_{2}}=0.6 > \nu _{R_{3}}=0.5\).
-
Case II: The orthopairs \(R_{1}=(0.6,0.65)\), \({R_{2}=(0.9,0.6)}\) and \(R_{3}=(0.9,0.4)\) are qROFVs for \({q=3}\) and \(R_{1}\sqsubset ^{t} R_{2}\sqsubset ^{t} R_{3}\) with \(\nu _{R_{1}}=0.65> \nu _{R_{2}}=0.6 > \nu _{R_{3}}=0.4\).
-
Case III: The orthopairs \({R_{1}=(0.5,0.8)}\), \({R_{2}=(0.9,0.6)}\) and \({R_{3}=(0.9,0.45)}\) are qROFVs for \({q=3}\) and \(R_{1}\sqsubset ^{t} R_{2}\sqsubset ^{t} R_{3}\) with \(\nu _{R_{1}}=0.8> \nu _{R_{2}}=0.6 > \nu _{R_{3}}=0.45\). The details of similarity measures in Case I to Case III are shown in Table 12. The table reveals that the similarity measures \({S_{d}^{1}}\), \({S_{d}^{2}}\), \({S_{d}^{3}}\), \({S_{p}^{6}}\) and \({S_{pb}}\) violates the axiom (S4), and thus, they are not the similarity measures. In addition, the similarity measures \({S_{d}^{1}}\), \({S_{d}^{2}}\), \({S_{d}^{3}}\), \({S_{p}^{1}}\), \({S_{p}^{4}}\), \({S_{p}^{5}}\), \({S_{p}^{6}}\), \({S_{p}^{7}}\), \({S_{p}^{8}}\), \({S_{p}^{9}}\), \({S_{p}^{10}}\) and \({S_{pb}}\) violates the axiom (MS4), and thus, they are not the improved similarity measures.
-
Case IV: If \({R_{1}=(a,a)}\) and \({R_{2}=(b,b)}\) \({(a\ne b)}\) be two qROFSs having same membership and non-membership degrees. Then, (a, a) and (b, b) are two distinct qROFSs. Some existing similarity measures violate condition (S2) of Definition 6 and thus not reliable. The similarity measures \({S_{c}^{1}}\) and \({S_{p}^{2}}\) formulate the maximum similarity between \({R_{1}}\) and \({R_{2}}\), that is, one. In addition, the multiparametric similarity measure for \({t=2}\) and \({k=1}\) work out the maximum similarity between them that is \({S_{mp}(R_{1},R_{2}) = 1 }\). For fix value of \({t_{1}=t_{2}=1}\), the similarity measure \({S_{p}^{13}}\) will leads to the same results. Thus, the second axiom of similarity definition is not satisfies for \({S_{c}^{1}}\), \({S_{p}^{2}}\), \({S_{mp}}\) and \({S_{p}^{13}}\). The details could be seen in Table 13. The similarity measure \({S_{p}^{3}}\) is just the addition of \({S_{p}^{1}}\) and \({S_{p}^{2}}\). Both components of \({S_{p}^{3}}\) have counter intuitive cases in Case I–Case IV. Thus, the resultant similarity measure is not reliable.
-
Case V: If \({R_{1}=(0,0)}\) and \({R_{2}=(x,y)}\) be two qROFSs. Then, the similarity measures \({S_{c}^{1}}\), \({S_{p}^{7}}\), \({S_{p}^{8}}\), \({S_{p}^{9}}\) and \({S_{p}^{10}}\) are not able to find similarity between \({R_{1}}\) and \({R_{2}}\). The details could be seen in Table 13.
-
Case VI: If \({R_{1}=(0,1)}\) and \({R_{2}=(x,f_{1})}\) be two qROFSs, where \({f_{1}}\) is any fix value available for orthopairs. Then, the similarity measures \({S_{p}^{1}}\), \({S_{p}^{4}}\), \({S_{p}^{5}}\), \({S_{p}^{6}}\), \({S_{p}^{7}}\), \({S_{p}^{8}}\), \({S_{p}^{11}}\) and \({S_{p}^{12}}\) are not able to find similarity between \({R_{1}}\) and \({R_{2}}\). That is, \({ S((0,0),(x,f_{1})) = f_{2}}\), where \({f_{2}}\) is any fix value obtain for similarity measures even we change the value of x. The details could be seen in Table 13. It is important to note that the similarity measures having this kind problems do not satisfy the condition (MS4) and thus not the improved similarity measures.
Conclusion
The reason to write this article is to point out the shortcomings in the existing cosine and cotangent functions, and maximum operator- based similarity measures. We have criticized the existing similarity measures and observed that they have failed to provide the intuitive results for strict inclusions and thus not reliable for practical applications (Examples 1 and 2, and “Comparision analysis”). We have defined an improved cosine and cotangent function-based similarity measures for qROFSs and discussed their properties. The fixed and relative ideal solution- based algorithmic procedures of the TOPSIS method have provided to solve MCDM problems. A numerical example to save organizational data from cyber attackers have discussed. In the future, we will apply these similarity measures to different real life applications and analyze other similarity measure-based MCDM methods. We will also formulate this kind of similarity measures for spherical fuzzy sets [49,50,51], T-spherical fuzzy sets [52], picture fuzzy sets [53,54,55], neutrosophic sets [56] and linear Diophantine sets [57].
References
Zadeh LA (1965) Fuzzy sets. Inf Control 8:338–353
Atanassov K (1999) Intuitionistic fuzzy sets: theory and applications. Springer, Heidelberg
Yager RR (2013) Pythagorean fuzzy subsets. In: Proc Joint IFSA world congress and NAFIPS, annual meeting, Edmonton, Canada June 24–28, pp 57–61. https://doi.org/10.1109/IFSA-NAFIPS.2013.6608375
Yager RR, Abbasov AM (2013) Pythagorean membership grades, complex numbers, and decision making: pythagorean membership grades and fuzzy subsets. Int J Intell Syst 28:436–452
Yager RR (2017) Generalized orthopair fuzzy sets. IEEE Trans Fuzzy Syst 25(5):1222–1230. https://doi.org/10.1109/TFUZZ.2016.2604005
Yager RR, Alajlan N (2017) Approximate reasoning with generalized orthopair fuzzy sets. Inf Fusion 38:65–73. https://doi.org/10.1016/j.inffus.2017.02.005
Ali MI (2018) Another view on q-rung orthopair fuzzy sets. Int J Intell Syst. https://doi.org/10.1002/int.22007
Hussain A, Ali MI, Mahmood T, Munir M (2020) q-rung orthopair fuzzy soft average aggregation operators and their application in multicriteria decision-making. Int J Intell Syst 35(4):571–599. https://doi.org/10.1002/int.22217
Liu P, Wang Y (2020) Multiple attribute decision making based on q-rung orthopair fuzzy generalized Maclaurin symmetric mean operators. Inf Sci 518:181–210
Peng X, Dai J, Garg H (2018) Exponential operation and aggregation operator for q-rung orthopair fuzzy set and their decision-making method with a new score function. Int J Intell Syst 33(1):2255–2282. https://doi.org/10.1002/int.22028
Liu P, Wang P (2018) Some q-rung orthopair fuzzy aggregation operators and their applications to multiple-attribute decision making. Int J Intell Syst 33(2):259–280
Xing Y, Zhang R, Wang J, Bai K, Xue J (2019) A new multi-criteria group decision-making approach based on q-rung orthopair fuzzy interaction Hamy mean operators. Neural Comput Appl. https://doi.org/10.1007/s00521-019-04269-8
Zhong Y, Gao H, Guo X, Qin Y, Huang M, Luo X (2019) Dombi power partitioned Heronian mean operators of q-rung orthopair fuzzy numbers for multiple attribute group decision making. PLoS One. https://doi.org/10.1371/journal.pone.0222007
Liu P, Chen S, Wang P (2018) Multiple-attribute group decision-making based on q-rung orthopair fuzzy power Maclaurin symmetric mean operators. Syst Man Cybern Syst IEEE Trans. https://doi.org/10.1109/TSMC.2018.2852948
Wei G, Gao H, Wei Y (2018) Some q-rung orthopair fuzzy Heronian mean operators in multiple attribute decision making. Int J Intell Syst 33(7):1426–1458. https://doi.org/10.1002/int.21985
Garg H, Chen SM (2020) Multiattribute group decision making based on neutrality aggregation operators of q-rung orthopair fuzzy sets. Inf Sci 517:427–447
Riaz M, Pamucar D, Athar Farid HM, Hashmi MR (2020) q-Rung orthopair fuzzy prioritized aggregation operators and their application towards green supplier chain management. Symmetry 12:976
Garg H, Gwak J, Mahmood T, Ali Z (2020) Power aggregation operators and VIKOR methods for complex q-rung orthopair fuzzy sets and their applications. Mathematics 8:538
Yang Z, Garg H, Li J (2020) Investigation of multiple heterogeneous relationships using a q-rung orthopair fuzzy multi-criteria decision algorithm. Neural Comput Appl. https://doi.org/10.1007/s00521-020-05003-5
Khan MJ, Kumam P, Shutaywi M (2021) Knowledge measure for the q-rung orthopair fuzzy sets. Int J Intell Syst 36(2):628–655. https://doi.org/10.1002/int.22313
Khan MJ, Ali MI, Kumam P (2021) A new ranking technique for q-rung orthopair fuzzy values. Int J Intell Syst 36(1):558–592
Tolga AC, Parlak IB, Castillo O (2020) Finite-interval-valued type-2 Gaussian fuzzy numbers applied to fuzzy TODIM in a healthcare problem. Eng Appl Artif Intell 87:103352
Castillo O, Muhuri PK, Melin P, Pulkkinen P (2020) Emerging issues and applications of type-2 fuzzy sets and systems, Engineering Applications of Artificial Intelligence, Volume 90, April 2020, 103596. https://doi.org/10.1016/j.engappai.2020.103596
Castillo O, Muhuri PK, Melin P, Pulkkinen P (2020) Emerging issues and applications of type-2 fuzzy sets and systems
Liu Z, Wang X, Li L, Zhao X, Liu P (2021) Q-rung orthopair fuzzy multiple attribute group decision-making method based on normalized bidirectional projection model and generalized knowledge-based entropy measure. J Ambient Intell Humaniz Comput 12(2):2715–2730
Tang G, Chiclana F, Liu P (2020) A decision-theoretic rough set model with q-rung orthopair fuzzy information and its application in stock investment evaluation. Appl Soft Comput J. https://doi.org/10.1016/j.asoc.2020.106212
Sirbiladze G (2020) Associated probabilities’ aggregations in interactive multiattribute decision making for q-rung orthopair fuzzy discrimination environment. Int J Intell Syst 35:335–372. https://doi.org/10.1002/int.22206
Zhang C, Liao H, Luo L (2019) Additive consistency-based priority generating method of q-rung orthopair fuzzy preference relation. Int J Intell Syst 34:2151–2176. https://doi.org/10.1002/int.22137
Riaz M, Farid HMA, Karaaslan F, Hashmi MR (2020) Some q-rung orthopair fuzzy hybrid aggregation operators and TOPSIS method for multi-attribute decision-making. Journal of Intelligent & Fuzzy Systems, vol. 39, no. 1, pp. 1227-1241, 2020
Krishankumar R, Nimmagadda SS, Rani P, Mishra AR, Ravichandran KS, Gandomi AH (2020) Solving renewable energy source selection problems using a q-rung orthopair fuzzy based integrated decision-making approach. J Clean Prod. https://doi.org/10.1016/j.jclepro.2020.123329
Liu D, Huang A (2020) Consensus reaching process for fuzzy behavioral TOPSIS method with probabilistic linguistic q-rung orthopair fuzzy set based on correlation measure. Int J Intell Syst, Volume35, Issue3, March 2020, Pages 494-528
Zhu H, Zhao J, Li H (2021) q-ROF-SIR methods and their applications to multiple attribute decision making. Int J Mach Learn Cybern, https://doi.org/10.1007/s13042-020-01267-4
Riaz M, Farid HMA, Karaaslan F, Hashmi MR (2020) Some q-rung orthopair fuzzy hybrid aggregation operators and TOPSIS method for multi-attribute decision-making. J Intell Fuzzy Syst 1–15 (preprint)
Zhang Z, Chen S-M (2020) Group decision making with incomplete q-rung orthopair fuzzy preference relations. Inf Sci. https://doi.org/10.1016/j.ins.2020.10.015
Liu D, Huang A (2020) Consensus reaching process for fuzzy behavioral TOPSIS method with probabilistic linguistic q-rung orthopair fuzzy set based on correlation measure. Int J Intell Syst 1–35
Zhu H, Zhao J, Li H (2021) q-ROF-SIR methods and their applications to multiple attribute decision making. Int J Mach Learn Cybern 1–13
Khan MJ, Kumam P, Kumam W (2021) Theoretical justifications for the empirically successful VIKOR approach to multi-criteria decision making. Soft Comput. https://doi.org/10.1007/s00500-020-05548-6
Peng X, Dai J (2019) Research on the assessment of classroom teaching quality with q-rung orthopair fuzzy information based on multiparametric similarity measure and combinative distance-based assessment. Int J Intell Syst 34(7):1588–1630. https://doi.org/10.1002/int.22109
Peng X, Liu L (2019) Information measures for q-rung orthopair fuzzy sets. Int J Intell Syst 34:1795–1834. https://doi.org/10.1002/int.22115
Du WS (2018) Minkowski-type distance measures for generalized orthopair fuzzy sets. Int J Intell Syst. https://doi.org/10.1002/int.21968
Pinar A, Boran F (2020) A q-rung orthopair fuzzy multi-criteria group decision making method for supplier selection based on a novel distance measure. Int J Mach Learn Cybern. https://doi.org/10.1007/s13042-020-01070-1
Peng X, Dai J (2019) Research on the assessment of classroom teaching quality with q-rung orthopair fuzzy information based on multiparametric similarity measure and combinative distance-based assessment. Int J Intell Syst. Volume34, Issue7, July 2019, Pages 1588-1630
Peng X, Dai J (2019) Research on the assessment of classroom teaching quality with q-rung orthopair fuzzy information based on multiparametric similarity measure and combinative distance-based assessment.Int J Intell Syst. Volume34, Issue7, July 2019, Pages 1588–1630
Liu D, Chen X, Peng D (2019) Some cosine similarity measures and distance measures between q-rung orthopair fuzzy sets. Int J Intell Syst 34(7):1572–1587
Chen SJ, Hwang CL (1992) Fuzzy multiple attribute decision making: methods and applications. Springer, Berlin
Wang J, Wei G, Wei C, Wei Y (2020) MABAC method for multiple attribute group decision making under q-rung orthopair fuzzy environment. Def Technol 16(1):208–216
Peng X, Ravichandran K, Krishankumar R (2019) Generalized orthopair fuzzy weighted distance-based approximation algorithm in emergency decision making. Int J Intell Syst. https://doi.org/10.1002/int.22140
Peng X, Dai J (2019) Research on the assessment of classroom teaching quality with q-rung orthopair fuzzy information based on multiparametric similarity measure and combinative distance-based assessment. Int J Intell Syst. 1–43
Ashraf S, Abdullah S, Mahmood T, Ghani F, Mahmood T (2019) Spherical fuzzy sets and their applications in multi-attribute decision making problems. J Intell Fuzzy Syst 36(3):2829–2844
Ashraf S, Abdullah S (2019) Spherical aggregation operators and their application in multi-attribute group decision-making. J Int Fuzzy Syst 34(3):493–523
Khan MJ, Kumam P, Deebani W, Kumam W, Shah Z (2020) Distance and similarity measures for spherical fuzzy sets and their applications in selecting mega projects. Mathematics 8(4):519. https://doi.org/10.3390/math8040519
Ullah K, Mahmood T, Jan N (2018) Similarity measures for T-spherical fuzzy sets with applications in pattern recognition. Symmetry 10:193
Cuong BC (2013) Picture fuzzy sets-first results. Part 1, seminar “neuro-fuzzy systems with applications institute of mathematics, Hanoi, Vietnam
Khan MJ, Kumam P, Ashraf S, Kumam W (2019) Generalized picture fuzzy soft sets and their application in decision support systems. Symmetry 11(3):415. https://doi.org/10.3390/sym11030415
Khan MJ, Kumam P, Liu P, Kumam W, Rehman H (2020) An adjustable weighted soft discernibility matrix based on generalized picture fuzzy soft set and its applications in decision making. J Int Fuzzy Syst 38(2):2103–2118. https://doi.org/10.3233/JIFS-190812
Smarandache F (1999) A unifying field in logics. In: Neutrosophy: neutrosophic probability, set and logic. American Research Press, Rehoboth
Riaz M, Hashmi MR (2019) Linear Diophantine fuzzy set and its applications towards multi-attribute decision-making problems. J Int Fuzzy Syst 37(4):5417–5439
Acknowledgements
The first author is grateful to the Petchra Pra Jom Klao doctoral scholarship KMUTT for the funding of 6 months research visit (Grant No. 39/ 2561) to the University of Salamanca, Spain. He would like to thank all members of the Department of Economics and Economic History for the warm hospitality and especially Prof. Jose Carlos R. Alcantud and Prof. Dr. GUSTAVO SANTOS GARCÍA for helpful comments and suggestions. Poom Kumam was supported by the Thailand Science Research and Innovation (TSRI) Basic Research Fund: Fiscal year 2021 under Project Number 64A306000005.
Author information
Authors and Affiliations
Contributions
All authors contributed equally in this research paper with no conflict of interest.
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Khan, M.J., Kumam, P., Alreshidi, N.A. et al. Improved cosine and cotangent function-based similarity measures for q-rung orthopair fuzzy sets and TOPSIS method. Complex Intell. Syst. 7, 2679–2696 (2021). https://doi.org/10.1007/s40747-021-00425-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40747-021-00425-7