
Abstract
In this paper, a multi-echelon, multi-period, decentralized supply chain (SC) with a single manufacturer, single distributor and single retailer is considered. For this setting, a two-phase planning approach combining centralized and decentralized decision-making processes is proposed, in which the first-phase planning is a coordinated centralized controlled, and the second-phase planning is viewed as independent decentralized decision-making for individual entities. This research focuses on the independence and equally powerful behavior of the individual entities with the aim of achieving the maximum profit for each stage. A mathematical model for total SC coordination as a first-phase planning problem and separate ones for each of the independent members with their individual objectives and constraints as second-phase planning problems are developed. We introduce a new solution approach using a goal programming technique in which a target or goal value is set for each independent decision problem to ensure that it obtains a near value for its individual optimum profit, with a numerical analysis presented to explain the results. Moreover, the proposed two-phase model is compared with a single-phase approach in which all stages are considered dependent on each other as parts of a centralized SC. The results prove that the combined two-phase planning method for a decentralized SC network is more realistic and effective than a traditional single-phase one.
Similar content being viewed by others

1 Introduction
Supply chain management (SCM) can be defined as the management of different entities of a SC network which is indeed a challenging and complex decision-making process (Hajiaghaei-Keshteli & Fathollahi Fard, 2018). Depending on the approach adopted, SC structures can be divided into two types, centralized and decentralized. In a centralized one, decisions for all the members or stages are managed by a central decision-maker (DM) whereas, in a decentralized one, each member makes its own decisions by optimizing its individual objectives without fully knowing the decisions or related information of the other members in the chain (Bose & Pekny, 2000). Although centralized SCs are easier in terms of planning than decentralized ones, in most real-world cases, it is rare to have a completely centralized structure because it requires a high degree of integration among its stages which is difficult to achieve (Haque et al., 2020a). It is also unrealistic to perform centralized decision-making when the SC members are independent economic entities interested in their own levels of profitability and some are competitors of others (Heydari, 2014). A multi-stage or multi-echelon SC consists of multiple tiers or levels which are generally used by some decentralized decision-making approaches, with these stages or entities often having equal power. Power can be defined as the capability of one channel member to control the decision variables of others in a given channel (Mokhlesian & Zegordi, 2014); for example, in a grocery SC, manufacturers and retailers usually come from different organizations, operate under different industrial environments, are equally powerful and, sometimes, even have some conflicting interests (Swaminathan et al., 1998). Similar examples are supermarkets in which various products come from diverse individual companies through distributors or other logistics providers, with each member operating separately, being independent in nature and not practically emerging as dominant or superior to any other. This type of network structure is also noticed in pharmaceutical chains (Nematollahi et al., 2017), decentralized customized manufacturing industries (Mourtzis & Doukas, 2012) and many other multi-agent SC networks consisting of individual business entities.
In the literature, most decentralized approaches are implemented through hierarchical relationships among partners which can be achieved in a centralized management system. However, as SC members from separate companies do not want to share their confidential information, centralized planning processes are impractical (Taghipour & Frayret, 2013). Although full information-sharing can improve coordination in a SC (Liu et al., 2020) and also benefit its parties (Bakal et al., 2011), in most cases, it is almost unachievable. Sometimes, as a lack of available easy-to-use information hinders the collaborative ambitions of SC partners (Hernández et al., 2013), therefore, planning a decentralized SC network using traditional centralized approaches is unrealistic. Usually, a centralized approach for solving SC planning problems is only approximating real-world scenarios since, in practice, most SCs are decentralized. Wang et al. (2004) identified the following problems associated with centralized optimization models:
-
a.
ignorance of independence and competitiveness among SC members;
-
b.
the increased cost of information processing required by a central DM; and
-
c.
the difficulties of modeling a large SC model.
Also, due to market segmentation, many manufacturers are now minimizing vertical integration in their operational strategies and becoming specialized in certain components which increases the number of decentralized SC practices and provides individual members with more freedom in their decision-making processes without affecting the chain’s overall configuration (Qu et al., 2010). In the modern era, SC players or members are focusing more on their core businesses while retaining partnerships with others through different policies and/or coordination mechanisms (Thomas et al., 2015). Consequently, decentralized SCs with different objectives are becoming more popular. Global SCM is continually facing the challenge of developing effective decision-making frameworks that can coordinate the distinctive strategies of different entities across their SCs (Narasimhan & Mahapatra, 2004). Furthermore, several SC studies focused on different types of coordinating contracts (Li et al., 2009) whereby some coordination mechanisms were developed to facilitate the involvement of SC members in a mutual decision-making system which ultimately forced a decentralized SC to be operated as a centralized one. Recently, Glock et al. (2020) studied a decentralized SC and proposed a buyback contract as a coordination scheme but limited for a two-stage network. All these raise a new research problem regarding modeling a multi-stage decentralized SC network that gives equal priority to its independent members while they maximize their own profits.
Though a number of researches were conducted on decentralized SC planning, very few of them focus on independence and/or equally powerful characteristics of the members. However, most of them focus on contract mechanism or leader–follower strategies to model such a SC structure, which limit their applicability for a multistage decentralized network with non-dominating entities. In addition, less researches are found dealing with quantitative modelling for the complete decentralized network under restricted information sharing characteristics. To address this research gap in the mentioned SC problem environment, the aim of this paper is to develop a mathematical model for a multi-stage decentralized SC with different independent, equally powerful members that ensures the best feasible operational plan for each stage while maximizing the individual members’ targets or goals in a two-phase setting. To ensure coordination among the different stages, in the first-phase, an optimization problem is formulated with some specific decision variables (coordinated distribution quantities from each upstream-to-downstream stage) and, in the second, optimization problems for each independent stage are developed separately with their multi-period planning strategies to fulfill individual requirements. It is assumed that the first-phase coordination will be conducted by a central independent authority who will collect necessary information from the individual member to ensure some synchronization through the chain. However, though this type of planning is new and innovative in the SC context, this structure is widely implemented in some other popular sectors. For example, the operations of decentralized electricity market conduct their planning strategies introducing such an independent authority (system operator) that determines some decisions (i.e. market-clearing price) to ensure effective communication between the market’s suppliers (i.e., generator companies) and its consumers (e.g., large industries, distributor companies, residential loads, etc.) (Zaman et al., 2017). Moreover, a similar type of operation can be seen in the garments industry where there is an independent authority usually named “buying house” who ensure the connection between its apparel suppliers and ultimate consumers, without disclosing the confidential information of each member of the chain (Jackson & Shaw, 2001). Thus, the incorporation of such a central authority to handle some of the decisions to ensure coordination among multiple entities is useful and practical where all the entities of the SC do not belong to the same organization.
Finally, a goal programming (GP)-based solution approach for solving the two-phase model to obtain feasible decision variables (production or ordering quantities, inventory or shortage amounts) for each stage using values obtained from both the SC planning phases is proposed. By applying this technique, the maximum attainable profit for each member is achieved and the equal-power characteristics of the stages are satisfied. Several experiments are conducted using a broad range of data sets using both LINDO and MATLAB software to justify the model. To analyze the results, a comparison with a traditional single-phase centralized SC network is performed. The major contributions of this study are:
-
i.
A two-phase modeling of a multi-stage decentralized SC consisting of independent, equally powerful stages while achieving the maximum target or goal of each stage;
-
ii.
Proposing a new central body for coordinating the solutions among all the entities of the SC;
-
iii.
Developing a new solution methodology using a GP approach; and
-
iv.
Conducting different experiments to validate the model and sensitivity analyses of some major parameters.
In a nutshell, the combined approach developed addresses some specific aspects of decentralized SC planning, primarily emphasizing the coordination mechanism of a multi-stage SC consisting of single entities in each stage. This research focuses on the nature of equal ownership of the independent entities of such a network in which every member tries to maximize its own objectives. The research contributes to the literature in several dimensions. Firstly, it addresses a very important but less explored field of research in case of decentralized SC planning, where the aim is to ensure coordination among multiple independent, non-dominating entities under restricted information sharing characteristics. Secondly, the research proposes a mathematical model to address the mentioned research problem with a two-phase planning approach to handle the individual decision-making characteristic of each member of the chain, in a more logical way. Thirdly, the research develops a new solution heuristic to solve the model based on a popular GP technique which provides an easily implementable feasible solution technique. In addition, the numerical analyses conducted in this paper justify the usefulness of the proposed model and the developed solution approach.
For a clear understanding, the definitions of the different terms used in this paper are provided below.
Coordination Aligning mechanisms between the demands and supplies of successive stages in a multi-stage decentralized network.
Equally powerful stage In a decentralized network, each stage neither imposes its own decisions nor controls the decision variables of other stages, i.e., there is no leader and follower among the entities.
Independent entities Members of a SC that can make their own decisions without being influenced by others in the chain.
The structure of this paper is organized as follows. A literature review is presented in Sect. 2, the research problem is discussed in Sect. 3 and the model formulated in Sect. 4. In Sect. 5, the solution approach is outlined, and, in Sect. 6, the experimental results and analyses are provided. A sensitivity analysis is performed in Sect. 7 and, finally, conclusions and future research directions are discussed in Sect. 9.
2 Literature review
Different researchers have attempted to formulate different methodologies for modeling a multi-stage SC considering different scenarios to ensure coordination among its stages. Arshinder and Deshmukh (2008) demonstrated the importance of this coordination and also noted the possible challenges and difficulties faced to achieve it. Compared with the literature on centralized SC systems, that on decentralized ones is less extensive. Detailed reviews of the coordination mechanisms of SC systems with separate and independent economic entities that can be found in Li and Wang (2007) and Rius-Sorolla et al. (2020) highlight the research opportunities for coordinating a decentralized SC. In this paper, firstly, a literature review of SC modeling using decentralized strategies from different aspects is focused on and, subsequently, the research gaps in this field are presented.
Modeling a decentralized SC is not a new research topic, with many researchers focusing on how to ensure the coordination or alignment of different members in a chain that are not fully controlled under a single authority. Some considered different problem scenarios with specific assumptions and developed models that addressed those problems using different solution techniques. Lee and Whang (1999) proposed some performance measurement schemes as incentives for alignment across a two-echelon decentralized SC to improve its effectiveness. They assumed that the final distribution of demand was known to all, with a central headquarters performing demand forecasting for each echelon. A significant number of studies of decentralized SC modeling used hierarchical top-down approaches to coordinate its members have been conducted. In them, the optimized decisions of each decentralized stage were considered separately and then coordinated according to the SC’s hierarchical configuration. Larbi et al. (2012) proposed such a coordination mechanism for decentralized members to exchange values among themselves by formulating sub-problems between consecutive stages. Nagurney et al. (2002) developed a model for a decentralized SC network consisting of multiple manufacturers and multiple retailers serving a consumer’s market demand and analyzed some qualitative properties of their equilibrium model. They assumed that the manufacturers’ shipments to retailers had to be equal to the retailers’ shipments accepted from the manufacturers at the equilibrium with complete information-sharing among the entities. However, in real scenarios, a decentralized SC network neither follows full solution exchanges among the entities according to a hierarchical structure nor shares all the information with them as every member is self-interested.
Some researchers proposed models for both centralized and decentralized decision-making processes to conduct comparative analyses; for example, Selim et al. (2008) developed a collaborative planning model for a three-stage SC and analyzed the results for both centralized and decentralized structures using a fuzzy GP approach that incorporated the DMs’ imprecise levels of aspiration for achieving their goals. Francis Leung (2010) and Duan and Warren Liao (2013) implemented models for analyzing centralized and decentralized SC structures assuming that each firm had complete information about the others. As expected, most studies concluded that a centralized SC was more theoretically effective than a decentralized one but the latter was more practical in the real world.
Apart from hierarchical approaches with mechanisms for changing solutions among stages, numerous researchers used a bi-level programming problem (BLPP) or Stackelberg game to model decentralized SC scenarios while assuming that different stages were leaders or followers; for instance, Yu et al. (2009a, 2009b) considered the manufacturer the leader and the retailer the follower in a manufacturer–retailer system. In contrast, some researchers considered the retailer as the leader and the manufacturer or supplier as a follower (Taleizadeh et al., 2016) while others studied both situations (Sarkar et al., 2016; Wang et al., 2017). Calvete et al. (2011) proposed a bi-level model assuming the distributor as the leader and the manufacturer as the follower and developed an optimization approach using an ant colony to solve the model. Naimi Sadigh et al. (2012) analyzed both manufacturer–leader and retailer–leader situations using a Stackelberg game. These studies considered mainly two-stage SCs with manufacturer–distributor, manufacturer–retailer or distributor–retailer components in which one stage acted as the leader and the other the follower which created a problem of choosing leaders and followers. Moreover, considering one party as the leader or more powerful in a Stackelberg game policy may create inefficiency in a decentralized operation (JemaÏ & Karaesmen, 2007). Therefore, although a BLPP is widely used in decentralized SC planning, assuming a specific stage as the leader or follower deviates from the specific objective of our paper, that is, considering each SC member as independent and equally powerful.
Also, not many researchers considered multiple SC stages in decentralized planning although a few studied three or four-stage SCs by applying a BLPP method while most assumed that the followers in a two-stage process were the leaders in the next two stages (Taleizadeh & Noori-daryan, 2014). Mokhlesian and Zegordi (2014) and Yugang et al. (2006) considered the manufacturer the leader and several retailers as followers whereas some others studied equilibrium models of multiple suppliers and a single retailer (Gallego & Talebian, 2013) or multiple retailers and a single warehouse (Ben Abdelaziz & Mejri, 2016). Ezimadu (2020) presented a multi-level hierarchical (Stackelberg) game with the manufacturer as the channel leader and the distributor and retailer as the first and second followers, respectively, thereby obtaining an equilibrium solution through a backward induction procedure. However, this type of sequential or iterative solution methodology for multi-stage SC planning does not suit the above mentioned problem environment.
To handle competitiveness among decentralized SC stages, some researchers combined a Stackelberg game policy with a Nash game approach (Ang et al., 2012; SeyedEsfahani et al., 2011; Yang & Bialas, 2007). Similarly, Taleizadeh and Noori-daryan (2014) and Yue and You (2014) considered three-echelon SCs consisting of supplier–producer–retailers and suppliers–manufacturer–customers, respectively, to be optimized as a decentralized SC network using a Stackelberg–Nash equilibrium approach. However, assuming a leader or follower in any SC stage does not always represent the actual scenario of a decentralized structure. In particular, due to the independent planning and autonomous nature of SC members, they rarely follow an unequal power distribution as is assumed in the literature. Moreover, this assumption becomes more complex in the case of a multi-stage SC.
An important characteristic of a real-world SC is the unavailability of its complete information. This is obvious in the case of decentralized SC planning in which each stage focuses on optimizing its own strategy while full information-sharing is often costly or not possible due to competitiveness. This issue has been addressed by a few researchers. Chen (2003) discussed different models developed by various researchers with independent firms having asymmetric information, mainly for a two-stage decentralized SC (manufacturer–retailer or supplier–manufacturer) network. This book chapter highlighted the different forms of incentives and trading rules among such SC partners and pointed out the importance of future research in this area. Cao and Chen (2006) implemented a bi-level model for a decentralized scenario in which a primary company (upper-level) operated with complete information of some secondary plants’ (lower-level) operations and solved it after transforming it into an equivalent single-level one. Later, Jung et al. (2008) developed a planning model for a decentralized SC that consisted of a manufacturer and third-party logistics provider considering minimum information exchange among the members. They designed a communication approach in which agents transferred limited business information to their partners (supply quantity available from the manufacturer and supply quantity requested by each logistics provider). Although a single-level centralized approach is more profitable as it has complete information about an individual member in the chain, a bi-level model is more practical for a decentralized resource allocation problem, as suggested by Yeh et al. (2014). Geng et al. (2010) analyzed five different scenarios of information-sharing for a decentralized SC control system consisting of single-distributor, multiple-retailer systems and compared the results with a centralized control policy. A dynamic mutual adjustment-based heuristic for coordinating a SC network with non-strategic information flows among independent partners was proposed by Taghipour and Frayret (2013). Muzaffar et al. (2017) designed a production-commitment contract for a manufacturer–retailer SC under imperfect information scenarios. However, all these studies were limited to two-stage SC scenarios, not multi-stage ones. In a recent study, Haque et al. (2020b) proposed a bi-level model for a non-cooperative multi-stage SC but assumed upstream members as more powerful than downstream ones.
We found a wide variety of approaches for solving decentralized SC planning problems based on specific scenarios and assumptions that used different types of traditional and exact optimization techniques. Also, different types of heuristics and metaheuristics have been developed by researchers to solve models. Mokhlesian and Zegordi (2014) applied a hybrid model of a genetic algorithm (GA) and local search methods to handle a multi-divisional BLPP for a network with one manufacturer (leader) and multiple retailers (followers). Recently, Luo et al. (2019) used a PSO-based computational algorithm to solve a multiple manufacturers–distributors decentralized SC problem using the BLPP concept. Some researchers used combinations of two or more heuristics to optimize networks; for example, Kuo and Han (2011) used BLPP to solve SC distribution-related problems and developed three different algorithms using a hybrid of GA and particle swarm optimization (PSO) techniques while assuming the distributor as leader and manufacturer as a follower. Their analysis showed that using hybrid methods was better than using only one algorithm. Similarly, a bi-level PSO (BPSO) algorithm was proposed by Ma and Wang (2013) for a two-stage SC with a manufacturer (leader) and retailer (follower). Calvete et al. (2014) applied a hybrid evolutionary algorithm to solve a bi-level model that combined distribution and manufacturing decisions while following a hierarchical decentralized decision-making process. Table 1 summarizes the most recent literature focusing on different types of modeling approaches for decentralized SC planning.
2.1 Research gaps and contributions
After reviewing the relevant literature, in this paper, the following research gaps can be highlighted:
-
i.
It is noted that most approaches that explored decentralized SCs generally considered specific assumptions and problem environments, such as game theory or BLPP techniques. They assumed that, in a chain, anyone stage is a leader that makes its decisions first while the other member(s) act as follower(s) that determine their decisions afterward. However, this type of problem environment may not be appropriate for many real-world SC scenarios in which each stage acts independently without being dominated by other(s).
-
ii.
A significant number of studies found a solution-exchanging mechanism among a chain’s entities according to its hierarchical structure using the output from one stage as input to another. However, obtaining optimal solutions through this approach is not suitable for a complete decentralized SC scenario as the stages make their own decisions independently without relying on those of others.
-
iii.
Most research on decentralized SC planning considered a two-stage SC network, not a usual multi-echelon one. Some studies that involved a multi-stage SC used some iterative solution mechanisms.
-
iv.
Although also found in the literature are different contracts used as coordination mechanisms among individual entities, they were applied mainly for a two-stage SC, not a multi-stage one.
Therefore, to the best of our knowledge, the models found in the literature considered mainly full information-sharing among entities and/or unequal power among members which is not a true representation of many current decentralized SC networks. This assumption of a mismatch in power also hinders strategies for achieving individual objectives. To overcome these limitations, in this paper, a quantitative approach for modeling a serial decentralized SC structure, in which different independent entities (manufacturer, distributor, retailer, etc.) are considered equally powerful and their objectives optimization simultaneously, is presented. Also, a multi-period mathematical model that combines some coordinated planning and independent decision-making processes using two-phase planning and GP approaches is developed.
3 Problem description
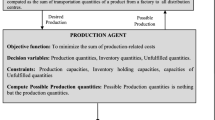
In this paper, a three-stage SC network consisting of a single manufacturer, single distributor and single retailer is considered. Each independent stage has a different multi-period planning schedule according to its individual objectives given its forecast downstream demand. In this problem, the manufacturer produces products and develops its inventory of finished goods at the end of time \(t\), the distributor receives products from the upstream manufacturer to fulfill its downstream forecast demand at time \(t\) and the retailer receives products from its upstream distributor at time \(t\) and serves end-customers. In this study, the transportation cost, which is composed of the transport’s capacity-level-dependent fixed cost and quantity-dependent variable one, is considered inbound for the distributor and retailer. The per unit variable transportation costs (truck fuel, direct labor, packaging, etc.) fluctuate with the volume while the fixed ones (rent, registration, etc.) do not change for a particular transportation level over a specific time. Moreover, if a distributed quantity reaches a specific amount, the per unit variable transportation costs start to decrease non–linearly with the quantity while the lead time is considered negligible. Figure 1 presents a typical interaction among the members of such a multi-stage decentralized SC network.

Decentralized SC
3.1 Assumptions of the study
In this study, we make the following assumptions.
-
i.
The manufacturer, distributor and retailer make individual plans to maximize their own profits.
-
ii.
Some centralized controls are maintained by a central authority or virtually among the stages to ensure overall coordination.
-
iii.
A single product is considered.
-
iv.
The planning horizon is finite.
-
v.
All parameters are considered as deterministic values.
-
vi.
No safety stock is taken into account.
As is usual in practice, each member of a decentralized SC makes its decisions separately to maximize its own profit. However, it is assumed that some central planning will be conducted by a central authority (a separate independent body) or through virtual cooperation among the members to synchronize the independent stages. This model is developed for a single product, the planning horizon is assumed to be a finite period and, as demand and all other related parameters are set as deterministic fixed values, so safety stock is not considered here.
3.2 Notations in study
The following notations are used to formulate the mathematical model.
3.2.1 Parameters
- \(Dm_{t}\) :
-
Forecast demand of manufacturer at time \(t\) (units)
- \(Dd_{t}\) :
-
Forecast demand of distributor at time \(t\) (units)
- \(Dr_{t}\) :
-
Forecast demand of retailer at time \(t\) (units)
- \(CSL_{total}\) :
-
Total SC customer service level (%)
- \(CSL_{m}\) :
-
Customer service level for manufacturer (%)
- \(CSL_{d}\) :
-
Customer service level for distributor (%)
- \(CSL_{r}\) :
-
Customer service level for retailer (%)
- \(Cp\) :
-
Production cost per unit ($/unit)
- \(m\) :
-
Mark-up of selling price (\(m\) > 1)
- \(Sm = m*Cp\) :
-
Manufacturer-to-distributor selling price ($/unit)
- \(Sd = m*Sm\) :
-
Distributor-to-retailer selling price ($/unit)
- \(Sr = m*Sd\) :
-
Retailer-to-customer selling price ($/unit)
- \(Pmmax\) :
-
Production capacity of manufacturer (units)
- \(Am\) :
-
Set-up cost for manufacturer per set-up ($/set-up)
- \(Ad\) :
-
Ordering cost for distributor per order ($/order)
- \(Ar\) :
-
Ordering cost for retailer per order ($/order)
- \(Om\) :
-
Plant operating and maintenance costs for manufacturer ($)
- \(Ch\) :
-
Unit material handling cost for distributor ($/unit)
- \(hm\) :
-
Unit inventory holding cost for manufacturer ($/unit/time)
- \(hd\) :
-
Unit inventory holding cost for distributor ($/unit/time)
- \(hr\) :
-
Unit inventory holding cost for retailer ($/unit/time)
- \(Hmmax\) :
-
Inventory storage capacity of manufacturer (units)
- \(Hdmax\) :
-
Inventory storage capacity of distributor (units)
- \(Hrmax\) :
-
Inventory storage capacity of retailer (units)
- \(Invm_{{\left( {t - 1} \right)}}\) :
-
Manufacturer’s beginning inventory at time \(t\) (units)
- \(Invd_{{\left( {t - 1} \right)}}\) :
-
Distributor’s beginning inventory at time \(t\) (units)
- \(Invr_{{\left( {t - 1} \right)}}\) :
-
Retailer’s beginning inventory at time \(t\) (units)
- \( L\) :
-
Stock-out cost per unit for retailer ($/unit/time)
- \(FTC_{d}\) :
-
Fixed transportation cost from manufacturer to distributor ($)
- \(FTC_{r}\) :
-
Fixed transportation cost from distributor to retailer ($)
- \(UTC_{d} \) :
-
Variable transportation cost from manufacturer to distributor ($/unit)
- \(UTC_{r}\) :
-
Variable transportation cost from distributor to retailer ($/unit)
- \(TCL_{d}\) :
-
Transportation capacity from manufacturer to distributor (units)
- \(TCL_{r}\) :
-
Transportation capacity from distributor to retailer (units)
- \(t\) :
-
Discrete time period (\(t = 1, 2, \ldots .T\))
3.2.2 Decision variables
- \(Y^{\prime}m_{t}\) :
-
Coordinated distribution quantity from manufacturer to distributor during time \(t\) (units)
- \(X^{\prime}m_{t}\) :
-
Coordinated production amount for manufacturer during time \(t\) (units)
- \(Ym_{t}\) :
-
Manufacturer’s required supply quantity to distributor during time \(t\) (units)
- \(Xm_{t}\) :
-
Manufacturer’s required production amount during time \(t\) (units)
- \(Invm_{t}\) :
-
Manufacturer’s ending inventory during time \(t\) (units)
- \(Y^{\prime}d_{t}\) :
-
Coordinated distribution quantity from distributor to retailer during time \(t\) (units)
- \(X^{\prime}d_{t}\) :
-
Coordinated procurement amount for distributor during time \(t\) (units)
- \(Yd_{t}\) :
-
Distributor’s required supply quantity to retailer during time \(t\) (units)
- \(Xd_{t}\) :
-
Distributor to manufacturer product ordering amount during time \(t\) (units)
- \(Invd_{t}\) :
-
Distributor’s ending inventory during time \(t\) (units)
- \(Y^{\prime}r_{t}\) :
-
Coordinated distribution quantity from retailer to final customer during time \(t\) (units)
- \(X^{\prime}r_{t}\) :
-
Coordinated procurement amount for retailer during time \(t\) (units)
- \(Yr_{t}\) :
-
Retailer’s required sales quantity to final customer during time \(t\) (units)
- \(Xr_{t}\) :
-
Retailer to distributor’s product-ordering amount during time \(t\) (units)
- \(Invr_{t}\) :
-
Retailer’s ending inventory during time \(t\) (units)
- \(LQ_{t}\) :
-
Shortage quantity for retailer during time \(t\) (units)
4 Model formulation
In this section, our mathematical model for a decentralized SC network in two phases is presented. In the first-phase, a mathematical model, in which some centralized decisions of a total SC are proposed to ensure that there are some coordination mechanisms through the chain, is developed. In the other, some mathematical models for each independent stage are implemented as decentralized decision-making processes. Some decisions, such as the coordinated distribution quantities in each stage, are considered first-phase decision variables to ensure total SC coordination and some others, such as the production or order quantities required, ending inventory and shortage quantity, are second-phase ones.
4.1 First-phase: coordination planning model
In the first-phase planning model, a centralized decision-making approach for ensuring overall SC coordination is developed by taking as an objective function of minimization of the total SC demand–supply gap between successive entities. Thereby, minimization of the deviations between the coordinated production (or procurement) quantities of the downstream stage and coordinated distribution quantities of the upstream one using some minimum information (i.e., demand and capacity) of each stage is achieved and, accordingly, the objective function is
where Eqs. (2) to (8) express the maximum production and receiving capacities, and forecast demands of each stage, Eq. (9) shows that the ratio between the total expected sales quantity and forecast demand should be greater than or equal to a specified minimum total SC customer service level (CSL) which will ensure overall SC efficiency and Eq. (10) applies to the non-negative decision variables.
4.2 Second-phase: independent planning models
In the second-phase planning stage, every member of a decentralized SC sets its objectives according to its own strategies.
4.2.1 Manufacturer’s strategy
The manufacturer tries to maximize its own profit while considering its related costs. In this research, to optimize its strategy, its production, plant operation, set-up and inventory holding costs are considered. The production cost is found by multiplying the production quantity by the unit production cost. The plant operating costs (utility, maintenance, etc.) are assumed as a fixed cost over a fixed period. The set-up cost is computed as the number of set-ups during a period multiplied by the cost per set-up. The holding cost is determined by multiplying the ending inventory by the per unit holding cost. The sales revenue is the result of multiplying the quantities sold by the manufacturer’s unit selling price. Therefore, as the manufacturer’s objective function can be formulated as
Equation (12) shows that the manufacturer’s supply must be greater than or equal to the required CSL of its demand (\(CS{L}_{m}\)), Eq. (13) is the manufacturer’s maximum production capacity and Eq. (14) ensures a material balance. The inventory holding capacity is represented in Eq. (15), Eq. (16) limits the manufacturer’s maximum number of sales and Eq. (17) applies to the non-negative decision variables.
4.2.2 Distributor’s strategy
Like the manufacturer, the distributor tries to maximize its profit while considering its related costs. In this study, the product purchase, product ordering, inventory holding, material handling and transportation costs are considered. The product purchase cost is the ordering quantity multiplied by the per unit selling price (from manufacturer to distributor) and the ordering one is calculated similarly to the manufacturer’s set-up cost. The material handling cost (labor, equipment, etc.) is determined by multiplying the ordering quantity by the unit material handling cost and overall transportation one by summing the fixed transportation costs and non-linear variable ones (the ordering quantity multiplied by the unit variable transportation cost). The sales revenue and inventory holding cost are calculated similarly to those of the manufacturer. Therefore, as the distributor’s profit can be formulated as
Equation (19) shows that the distributor’s supply amount must be greater than or equal to the required CSL of its demand (\(CS{L}_{d}\)) and a material balance is ensured by Eq. (20). The inventory holding capacity is represented in Eqs. (21) and (22) denotes the distributor’s maximum allowable quantity that can be received during each period. Equation (23) limits the maximum number of sales for the distributor and Eq. (24) applies to the non-negative decision variables.
4.2.3 Retailer’s strategy
Similar to the manufacturer and distributor, the retailer also tries to maximize its profit while considering its related costs which, in this study, are the product purchase, product ordering, inventory holding, shortage and transportation ones. The sales revenue and product ordering and inventory holding costs are calculated similarly to those of the manufacturer, and the product purchase and transportation ones similar to those of the distributor. The shortage cost is the product of the total shortage quantities over a period and the unit stock-out cost which must be fulfilled in the next time period, where the per unit shortage cost (\(L\)) is assumed to be a non-linear function of a stock-out or shortage quantity (\(L{Q}_{t}\)), with a larger one leading to a proportionally greater shortage cost, i.e., the slope of the shortage function gradually increases with increases in the shortage quantity (Mirzapour Al-e-hashem et al., 2013).
Therefore, as the retailer’s profit can be formulated as
Equation (26) shows that the retailer’s supply must be greater than or equal to the CSL of its demand (\(CS{L}_{r}\)). A material balance is ensured through Eq. (27), where a positive inventory represents the ending inventory amount or excess stock and a negative one the shortage or stock-out quantity for period \(t\). Equation (28) represents the inventory holding capacity and Eq. (29) the retailer’s maximum allowable quantity that can be received during each period. Equation (30) limits the maximum sales for the retailer and Eq. (31) applies to the non-negative decision variables.
4.3 Non-linear transport cost function
As previously discussed, this research considers a non-linear variable transport cost function with the amount of quantity purchased in a specific time period. We assume that, if a shipped quantity reaches a certain amount, the per unit variable transportation cost starts to decrease and then increases after a specific quantity following a non-linear relationship with the quantity; for example, the relationship between the unit variable cost for transporting the quantity purchased from the manufacturer to the distributor is formulated as
4.4 Non-linear shortage cost function
In this study, the shortage cost function is considered a non-linear function of the shortage quantity which enables a DM to reduce the stock-out as much as possible. Therefore, as increasing the stock-out quantity causes increased shortage costs, the slope of the shortage or penalty function gradually increases with increases in the shortage quantity (Mirzapour Al-e-hashem et al., 2013). The relationship between the shortage or lost sales costs and shortage quantity is formulated as
5 Solution approach
In this research, the developed model is a two-phase planning problem in which the coordination planning problem is a linear programming and the individual planning are non-linear programming problems. We consider independent planning of each stage as well as coordinated planning of the total SC network. To solve the complete model, a combined solution approach using a GP technique is proposed, as discussed below.
GP technique is one of the most powerful, multi-objective decision-making approaches in which the objective is to minimize unwanted deviations between the actual achievement of goals and their aspirational levels or target goals (Choudhary & Shankar, 2014). We use a weighted GP method in which a specific weight is applied to each deviational variable based on its level of importance, with a goal or target value assigned to each objective of the second-phase problem and a numerical weight (\(w_{1}\), \(w_{2}\), \(w_{3}\), … \(w_{n}\)) imposed by the DM to achieve those goals. In our proposed planning model, as no stage is considered superior to any other, the same weight is used (\(w_{m} = w_{d} = w_{r}\)) for each stage and the combined model is
In this combined GP model, Eqs. (35) to (37) convert the objective function equations of each SC stage in the model in the second-phase to achieve a target or goal value set by the members, with the deviational variables \({d}^{-}\) and \({d}^{+}\) representing how far the solution deviates from each goal or target in terms of under- and over-achievement, respectively. Equation (38) shows the non-negativity of the deviational variables and Eq. (39) includes the constraints stated earlier in the second-phase model.
5.1 Solution methodology
In this research, a new approach for solving the problems under consideration is proposed. It is innovative as it passes solutions obtained from the first-phase and individual second-phase problems to the combined model based on GP to determine the values of the final decision variables. In this sub-section, its method for solving the proposed two-phase planning model is described.
Step 1 Solve the first-phase optimization problem
This proposed solution approach begins by solving the first-phase optimization problem to obtain the values of its decision variables using Eqs. (1) to (10), i.e., coordinated distribution quantities of the members to their downstream ones (\(Y^{\prime}m_{t}\), \(Y^{\prime}d_{t}\), \(Y^{\prime}r_{t}\)).
Step 2 Solve individual second-phase problems
In parallel with step 1, the individual second-phase problems of the SC members (maximizing the profits of the manufacturer, distributor and retailer) are solved to achieve the goal or target values, which are set according to the objective function values of the members, using Eqs. (11) to (17), (18) to (24) and (25) to (31).
Step 3 Solve the combined model
After completing steps 1 and 2, the combined model is solved to obtain feasible values of the decision variables (\(X{m}_{t}\), \(X{d}_{t}\), \(X{r}_{t}, Inv{m}_{t}, Inv{d}_{t}, Inv{r}_{t}, {LQ}_{t}\)) using Eqs. (34) to (39). The values obtained in steps 1 and 2 are used to set the required sales quantities (\(Y{m}_{t}\), \(Y{d}_{t}\), \(Y{r}_{t}\)) as equal to the coordinated distribution quantities (\(Y^{\prime}m_{t}\), \(Y^{\prime}d_{t}\), \(Y^{\prime}r_{t}\)) and the target or goal values of each member as the objective function values of each stage’s profit maximization problem.
The overall solution approach for our developed model is illustrated in Fig. 2.

Flowchart of the solution approach
6 Experimentation and results discussion
In this section, our developed model is analyzed using the optimization software of both LINDO and MATLAB R2019b on an Intel Core i7 processor with 16.00 GB RAM and a 3.40 GHz CPU.
6.1 Numerical data
For experimentation purposes, to validate the model, some hypothetical data ranges are considered. As, in real-world cases, production and distribution plans are generally influenced by demand, the production capacity of the manufacturer and procurement ones of the distributor and retailer for each period are taken as the upper limits of the forecast demand for each stage assuming that capacity is greater than demand. The forecast demands of different data sets for each stage are presented in Table 2 and other production-ordering and cost-related data for each stage in Tables 3, 4, 5 and 6. In this numerical analysis, three different data sets for capacity- and cost-related parameters for each stage are used to adequately validate the model.
Also, three demand data sets using the following data ranges for a retailer’s end-customer demand with a discrete uniform distribution for the abovementioned problem are considered. As discussed in Li (2010), the end customer demand does not always carry forward up through the decentralized chain as original demand, but they appear as evolved demand, where orders are often successively passed to the upstream entities which are termed as popular “demand evolution”. However, as there are hypothetical demand data for each stage are considered in this paper, for simplicity, the forecast demands for upstream stages are calculated as fixed amounts (\({\varepsilon }_{d}\) for distributor and \({\varepsilon }_{m}\) for manufacturer) increased from their downstream stages, as it is assumed that demand or ordering quantities increase when moving upward to a decentralized SC as end-customer demand data are not commonly shared accurately through such a chain.
Therefore, we consider:
-
Retailer’s demand range, \(D{r}_{t}\) = [200, 300];
-
Distributor’s demand, \(D{d}_{t}\) = \(D{r}_{t}+ {\varepsilon }_{d}\); and
-
Manufacturer’s demand, \(D{m}_{t}\) = \(D{d}_{t}+ {\varepsilon }_{m}\);
-
where \({\varepsilon }_{d}=\) \({\varepsilon }_{m}=\) 100.
Also, there are different CSLs in each data set to vary the experiments; for example, in data set 1, the \(CSL\)s in the planning models of total SC coordination and individual stages are the same whereas, in data sets 2 and 3, they are different.
Let \(t =\) 1, 2, 3, 4, 5, 6 month; m = 1.5.
6.2 Discussion of results
The results obtained by our developed model using the three data sets described above are analyzed in this sub-section. For this purpose, solutions from two different methods are considered using both LINDO and MATLAB software, with the popular function ‘fmincon’ (Castillo-Villar et al., 2012) used to analyze the results in MATLAB.
Firstly, the coordinated distribution quantities (\(Y^{\prime}m_{t}\), \(Y^{\prime}d_{t}\), \(Y^{\prime}r_{t}\)) of each SC stage obtained from the first-phase optimization problem mentioned in step 1 (Sect. 5.1) are shown in Table 7.
Then, the second-phase individual problems are calculated to obtain their stage profits to set the target or goal values for use in the combined model, as stated in step 2, with the detailed results obtained by optimizing each stage presented in “Appendix 1” (Tables 12, 13 and 14). It can be seen that the maximum profits of the stages obtained from different methods are slightly different for the manufacturer, distributor and retailer. The target or goal values in the combined model are set by rounding up the objective function (profit) values of each method to the next integer.
After step 3, the outputs from the first-phase optimization planning problem shown in Table 8 are used in the combined model to obtain the best feasible values of the decision variables while considering the specified target or goal profits achieved in step 2. Tables 8, 9 and 10 show the final feasible values obtained from the developed model for three different data sets using different methods.
Tables 8, 9 and 10 show the model’s decision variables (production or ordering quantities, inventories or shortage amounts) of different stages that satisfy the minimum total SC gap between the production (or ordering) and receiving quantities of the stages, as determined in the first-phase optimization problem, to ensure better coordination among the decentralized stages. From this analysis of results, although it can be seen that the highest actual profits are obtained using the MATLAB ‘fmincon’ function for each SC stage in all the data sets, this results in more inventories for some stages than those obtained using LINDO. Also, it is clear that using MATLAB, the actual profits are close to the target one with low deviational variables. Different methods are used to analyze the results so that a DM can choose its most suitable solutions.
6.3 Comparisons of results
To compare our proposed model, a single-phase approach, in which all the stages of the SC are considered a centralized SC, are analyzed, and its objective function is
subject to Eqs. (12) to (17), (19) to (24) and (26) to (31).
The above centralized single-phase model is solved using the data (data set 1) considered in the proposed model with LINDO optimization software on an Intel Core i7 processor with 16.00 GB RAM and a 3.40 GHz CPU. “Appendix 2” shows the results in detail (Table 15).
Table 11 shows a comparison of our developed model and a traditional single-phase centralized one for the specific problem environment mentioned in this research which indicates that the manufacturer’s profit is greater but those of the distributor and retailer slightly lower. Our model also yields a minor increase in ordering quantities to meet each stage’s actual demand and far fewer inventories for the total SC which will ultimately reduce costs. It is noticeable that, although centralized control is more effective for maximizing the overall SC profit, it may not provide the maximum one for each stage. The values of the decision variables obtained from each approach are placed in the objective function equation to calculate the profits of the individual stages. As shown in Table 11, the total SC profit is higher in the single-phase model because of centralized planning which is unrealistic in decentralized scenarios. Consequently, it can be stated that our model can feasibly generate maximum achievable profits for a decentralized SC with equally powerful independent entities as well as ensure overall network coordination.
7 Sensitivity analysis
In this section, an analysis of some important parameters that can affect the developed model is presented. Changes in the profit of each SC stage are achieved using our model are compared, with the SC CSLs (\(CS{L}_{total}\) = \(CS{L}_{m}\) = \(CS{L}_{d}\) = \(CS{L}_{r}\)), the maximum production capacity of the manufacturer (\(Pmmax\)), procurement limit of the distributor (\({TCL}_{d}\)) and procurement limit of the retailer (\({TCL}_{r}\)) analyzed. Only one variable changes in each analysis, as stated in Sect. 6.1 (data set 1). In Fig. 3, it can be seen that the profit increases with increasing \(CSL\)s for the manufacturer and distributor but, for the retailer, decreases slightly at first and then increases with a higher \(CSL\).

SC’s individual stage profits with different CSLs
A SC’s profit also changes with a change in the maximum production capacity of the manufacturer. Different production capacity values are used, starting with the maximum demand for the manufacturer (data set 1) and then raised gradually. As shown in Fig. 4, the profit for each stage increases up to Pmmax = 500 and then decreases at Pmmax = 510 after which it again increases but only for the manufacturer.

SC’s individual stage profits with different Pmmax values
The effects of the procurement limit of the distributor (\({TCL}_{d}\)) and retailer (\({TCL}_{r}\)) in different SC stages are also studied. In Fig. 5, it is clear that the manufacturer’s profit increases with an increase in the \({TCL}_{d}\) but decreases for the distributor and is not consistent for the retailer. In contrast, the profits for the manufacturer and retailer slightly decrease with increases in the \({TCL}_{r}\) but increases for the distributor, as shown in Fig. 6.

SC’s individual stage profits with different TCLd values

SC’s individual stage profits with different TCLr values
It is notable that, as SC members are closely interrelated with each other, they are affected by the parameters or decisions taken by any stage, not necessarily only their own. Therefore, as changing the production capacity or procurement limit by any stage affects the profits of other stages, SC managers should be very careful to select the values of the different parameters in their planning process that obtain the best possible feasible solutions for a decentralized network.
8 Managerial implications
In many SC environments, the entities are not necessarily part of a single organization. For example, the manufacturer may belong to one organization, the wholesaler may belong to another and so on. Considering this scenario, this paper addresses the problem of decentralized SC operational planning which is a common and practical decision-making scenario in the real-world business environment. Moreover, the recent COVID-19 pandemic has forced many businesses to be decentralized to effectively operate their functions and thus has proved the necessity of proper SC planning (Chowdhury et al., 2021). In a decentralized structure, each member focuses on its own strategies and objectives to maximize, mostly ignoring other members of the chain, which often results in poor SC performances. Hence, appropriate planning can help SC managers to overcome this situation significantly. To do this, we propose a new central body or entity to decide a coordinate material flow among all the entities in the SC. So, this paper tries to develop a mathematical model considering the independent and equally powerful member of such a decentralized network using a two-phase planning approach, where some coordination mechanisms are proposed at first-phase optimization problem to be conducted by a central authority, and some other individual optimization problems are developed for each independent stage. This type of innovative planning approach can easily be implemented for a multistage decentralized SC network if each member of the chain is agreed on sharing necessary information (demand–supply related) to the central authority to ensure overall chain coordination. Though the proposed planning methodology is new in the SC planning context, they are widely used in the electrical market (Zaman et al., 2017), garments buying houses (Jackson & Shaw, 2001) and so on where a central authority conducts some coordinating activities for the whole system. Moreover, the model developed in this paper can also be implemented for any number of SC stages that are serially connected in the chain.
Our numerical analyses provide some useful insights to the SC managers. For example, we analyzed three different data sets varying demand and other planning related parameters for each stage, to validate the model with a broader range of data sets. The result analyses provide an idea about how the values of different decision parameters may affect the model output results. The result comparison section may make practitioners more confident about the relative benefits of using our proposed two-phase planning model for a complete decentralized structure over a centralized single-phase planning approach. In addition, the sensitivity analyses presented in this paper may help the decision-maker to select values of some important SC parameters. As an instance, from our analysis, it is seen that as the profit increases with increasing \(CSL\)s for the manufacturer and distributor but, for the retailer, it decreases slightly at first and then increases with a higher \(CSL\), so the SC managers should be careful to select their \(CSL\) level for maximum profit attainment. Similarly, managers should be careful to fix their production or procurement capacity limits as they affect not only a stage’s own profit but also others, as shown in our analysis. In summary, the numerical analyses presented in this paper justify the validity of the developed model to address the specific SC problem environment and provide a useful guideline to the practical SC managers to make their planning strategies profitably.
9 Conclusion and future works
In this paper, the development of unique mathematical modeling with a proposed planning approach for a multi-echelon multi-period decentralized SC consisting of a single manufacturer, single distributor, and single retailer with different objectives was described. This study aimed to ensure overall SC coordination for a decentralized scenario with independent, equally powerful stages and the maximum achievable profit for each of its members. Therefore, we developed a model that combined centralized and decentralized decision-making approaches with two-phase planning procedures. It was formulated as a non-linear optimization problem in which the mechanism of the entire SC synchronization was considered as a centralized first-phase optimization problem and the individual optimization problems (profit maximizations) of each of the independent stages are considered as second-phase ones. A new solution approach using a well-known GP technique to solve our model to achieve the maximum individual profit planned by each stage was applied. Several numerical analyses were performed using both LINDO and MATLAB optimization software and the results obtained compared with those of a single-phase centralized SC model which is the usual approach for SC optimization. They implied that our model ensured feasible solutions for a decentralized SC structure more logically than a single-phase centralized approach while considering individual profit maximization and overall SC coordination. We conducted a sensitivity analysis of some key parameters of the developed model which could help managers as it offers them a useful quantitative approach for making better feasible and effective decisions in their planning processes to ensure overall SC coordination while realistically maintaining individual profit maximization with restricted information-sharing throughout the chain.
However, several future research directions can be drawn from the study. More practical situations that extend the model could be considered in the future; for example, further SC costs could be incorporated in each stage by fluctuating the parameters while multiple entities could be included in each stage and multiple objectives and/or different real-life uncertainties considered. The model can also be solved using different metaheuristic approaches like genetic algorithm, particle swarm optimization, red deer algorithm, social engineering optimizer (Fathollahi-Fard et al., 2020), etc. to compare the results with our developed heuristic for solving large scale SC network. We believe that our proposal of using a central body for coordinating material flow in decentralized SC environments will be useful for many researchers and practitioners, and hence they will also extend this research by considering more practical aspects in their organizations.
References
Ang, J., Fukushima, M., Meng, F., Noda, T., & Sun, J. (2012). Establishing Nash equilibrium of the manufacturer–supplier game in supply chain management. Journal of Global Optimization, 56(4), 1297–1312.
Arshinder, K. A., & Deshmukh, S. G. (2008). Supply chain coordination: Perspectives, empirical studies and research directions. International Journal of Production Economics, 115(2), 316–335.
Bakal, İS., Erkip, N., & Güllü, R. (2011). Value of supplier’s capacity information in a two-echelon supply chain. Annals of Operations Research, 191(1), 115–135.
Ben Abdelaziz, F., & Mejri, S. (2016). Multiobjective bi-level programming for shared inventory with emergency and backorders. Annals of Operations Research, 267(1–2), 47–63.
Bose, S., & Pekny, J. F. (2000). A model predictive framework for planning and scheduling problems: A case study of consumer goods supply chain. Computers and Chemical Engineering, 24(2–7), 329–335.
Calvete, H. I., Galé, C., & Iranzo, J. A. (2014). Planning of a decentralized distribution network using bilevel optimization. Omega, 49, 30–41.
Calvete, H. I., Galé, C., & Oliveros, M.-J. (2011). Bilevel model for production–distribution planning solved by using ant colony optimization. Computers & Operations Research, 38(1), 320–327.
Cao, D., & Chen, M. (2006). Capacitated plant selection in a decentralized manufacturing environment: A bilevel optimization approach. European Journal of Operational Research, 169(1), 97–110.
Castillo-Villar, K. K., Smith, N. R., & Simonton, J. L. (2012). The impact of the cost of quality on serial supply-chain network design. International Journal of Production Research, 50(19), 5544–5566.
Chen, F. (2003). Information sharing and supply chain coordination. In S. C. Graves & A. G. de Kok (Eds.), Handbooks in OR and MS (Vol. 11, pp. 341–421). Elsevier.
Choudhary, D., & Shankar, R. (2014). A goal programming model for joint decision making of inventory lot-size, supplier selection and carrier selection. Computers & Industrial Engineering, 71, 1–9.
Chowdhury, P., Paul, S. K., Kaisar, S., & Moktadir, M. A. (2021). COVID-19 pandemic related supply chain studies: A systematic review. Transportation Research Part E: Logistics and Transportation Review, 148, 102271.
Duan, Q., & Warren Liao, T. (2013). Optimization of replenishment policies for decentralized and centralized capacitated supply chains under various demands. International Journal of Production Economics, 142(1), 194–204.
Ezimadu, P. (2020). Modelling cooperative advertising decisions in a manufacturer–distributor–retailer supply chain using game theory. Yugoslav Journal of Operations Research, 30, 1–33.
Fathollahi-Fard, A. M., Ahmadi, A., & Al-e-Hashem, E. H. S. (2020). Sustainable closed-loop supply chain network for an integrated water supply and wastewater collection system under uncertainty. Journal of Environmental Management, 275, 111277.
Francis Leung, K. N. (2010). A generalized algebraic model for optimizing inventory decisions in a centralized or decentralized multi-stage multi-firm supply chain. Transportation Research Part E: Logistics and Transportation Review, 46(6), 896–912.
Gallego, G., & Talebian, M. (2013, 1–6 December). Multi-supplier and single retailer contracts: Profit splits under equilibrium. In 22nd National conference of the australian society for operations research, Adelaide.
Geng, W., Qiu, M., & Zhao, X. (2010). An inventory system with single distributor and multiple retailers: Operating scenarios and performance comparison. International Journal of Production Economics, 128(1), 434–444.
Glock, C. H., Rekik, Y., & Ries, J. M. (2020). A coordination mechanism for supply chains with capacity expansions and order-dependent lead times. European Journal of Operational Research, 285(1), 247–262.
Hajiaghaei-Keshteli, M., & Fathollahi Fard, A. M. (2018). Sustainable closed-loop supply chain network design with discount supposition. Neural Computing and Applications, 31(9), 5343–5377.
Haque, M., Paul, S. K., Sarker, R., & Essam, D. (2020a). Bi-objective multistage decentralized supply chain planning. In IEEE International conference on industrial engineering and engineering management (IEEM), Singapore.
Haque, M., Paul, S. K., Sarker, R., & Essam, D. (2020b). Managing decentralized supply chain using bilevel with Nash game approach. Journal of Cleaner Production, 266, 121865.
Hernández, J. E., Mula, J., Poler, R., & Lyons, A. C. (2013). Collaborative planning in multi-tier supply chains supported by a negotiation-based mechanism and multi-agent system. Group Decision and Negotiation, 23(2), 235–269.
Heydari, J. (2014). Lead time variation control using reliable shipment equipment: An incentive scheme for supply chain coordination. Transportation Research Part E: Logistics and Transportation Review, 63, 44–58.
Jackson, T., & Shaw, D. (2001). The roles of the fashion buyer and garment technologist. In T. Jackson & D. Shaw (Eds.), Mastering: Fashion buying and merchandising management (pp. 9–25). Macmillan Education.
JemaÏ, Z., & Karaesmen, F. (2007). Decentralized inventory control in a two-stage capacitated supply chain. IIE Transactions, 39(5), 501–512.
Jokar, A., & Hosseini-Motlagh, S.-M. (2019). Simultaneous coordination of order quantity and corporate social responsibility in a two-echelon supply chain: A combined contract approach. Journal of the Operational Research Society, 71(1), 69–84.
Jung, H., Frank Chen, F., & Jeong, B. (2008). Decentralized supply chain planning framework for third party logistics partnership. Computers & Industrial Engineering, 55(2), 348–364.
Kuo, R. J., & Han, Y. S. (2011). A hybrid of genetic algorithm and particle swarm optimization for solving bi-level linear programming problem—A case study on supply chain model. Applied Mathematical Modelling, 35(8), 3905–3917.
Larbi, E. Y. A. S., Bekrar, A., Trentesaux, D., & Beldjilali, B. (2012). Multi-stage optimization in supply chain: An industrial case study. In 9th International conference on modeling, optimization.
Lee, H., & Whang, S. (1999). Decentralized multi-echelon supply chains: Incentives and information. Management Science, 45(5), 633–640.
Li, S., Zhu, Z., & Huang, L. (2009). Supply chain coordination and decision making under consignment contract with revenue sharing. International Journal of Production Economics, 120(1), 88–99.
Li, X. (2010). Optimal inventory policies in decentralized supply chains. International Journal of Production Economics, 128(1), 303–309.
Li, X., & Wang, Q. (2007). Coordination mechanisms of supply chain systems. European Journal of Operational Research, 179(1), 1–16.
Liu, C., Xiang, X., & Zheng, L. (2020). Value of information sharing in a multiple producers–distributor supply chain. Annals of Operations Research, 285(1–2), 121–148.
Luo, H., Liu, L., & Yang, X. (2019). Bi-level programming problem in the supply chain and its solution algorithm. Soft Computing, 24(4), 2703–2714.
Ma, W., & Wang, M. (2013). Particle swarm optimization-based algorithm for bilevel joint pricing and lot-sizing decisions in a supply chain. Applied Artificial Intelligence, 27(6), 441–460.
Mirzapour Al-e-hashem, S. M. J., Baboli, A., & Sazvar, Z. (2013). A stochastic aggregate production planning model in a green supply chain: Considering flexible lead times, nonlinear purchase and shortage cost functions. European Journal of Operational Research, 230(1), 26–41.
Mokhlesian, M., & Zegordi, S. H. (2014). Application of multidivisional bi-level programming to coordinate pricing and inventory decisions in a multiproduct competitive supply chain. The International Journal of Advanced Manufacturing Technology, 71(9–12), 1975–1989.
Mourtzis, D., & Doukas, M. (2012). Decentralized manufacturing systems review: Challenges and outlook. Logistics Research, 5(3–4), 113–121.
Muzaffar, A., Deng, S., & Malik, M. N. (2017). Contracting mechanism with imperfect information in a two-level supply chain. Operational Research, 20(1), 349–368.
Nagurney, A., Dong, J., & Zhang, D. (2002). A supply chain network equilibrium model. Transportation Research Part E: Logistics and Transportation Review, 38(5), 281–303.
Naimi Sadigh, A., Mozafari, M., & Karimi, B. (2012). Manufacturer–retailer supply chain coordination: A bi-level programming approach. Advances in Engineering Software, 45(1), 144–152.
Narasimhan, R., & Mahapatra, S. (2004). Decision models in global supply chain management. Industrial Marketing Management, 33(1), 21–27.
Nematollahi, M., Hosseini-Motlagh, S.-M., & Heydari, J. (2017). Economic and social collaborative decision-making on visit interval and service level in a two-echelon pharmaceutical supply chain. Journal of Cleaner Production, 142, 3956–3969.
Qu, T., Huang, G. Q., Zhang, Y., & Dai, Q. Y. (2010). A generic analytical target cascading optimization system for decentralized supply chain configuration over supply chain grid. International Journal of Production Economics, 127(2), 262–277.
Rius-Sorolla, G., Maheut, J., Estellés-Miguel, S., & Garcia-Sabater, J. P. (2020). Coordination mechanisms with mathematical programming models for decentralized decision-making: A literature review. Central European Journal of Operations Research, 28(1), 61–104.
Sarkar, B., Saren, S., Sarkar, M., & Seo, Y. (2016). A Stackelberg game approach in an integrated inventory model with carbon-emission and setup cost reduction. Sustainability, 8(12), 1244.
Selim, H., Araz, C., & Ozkarahan, I. (2008). Collaborative production–distribution planning in supply chain: A fuzzy goal programming approach. Transportation Research Part E: Logistics and Transportation Review, 44(3), 396–419.
SeyedEsfahani, M. M., Biazaran, M., & Gharakhani, M. (2011). A game theoretic approach to coordinate pricing and vertical co-op advertising in manufacturer–retailer supply chains. European Journal of Operational Research, 211(2), 263–273.
Swaminathan, J. M., Smith, S. F., & Sadeh, N. M. (1998). Modeling supply chain dynamics: A multiagent approach. Decision Sciences, 29(3), 607–632.
Taghipour, A., & Frayret, J.-M. (2013). Dynamic mutual adjustment search for supply chain operations planning co-ordination. International Journal of Production Research, 51(9), 2715–2739.
Taleizadeh, A. A., & Noori-daryan, M. (2014). Pricing, manufacturing and inventory policies for raw material in a three-level supply chain. International Journal of Systems Science, 47(4), 919–931.
Taleizadeh, A. A., Noori-daryan, M., & Govindan, K. (2016). Pricing and ordering decisions of two competing supply chains with different composite policies: A Stackelberg game-theoretic approach. International Journal of Production Research, 54(9), 2807–2836.
Thomas, A., Krishnamoorthy, M., Venkateswaran, J., & Singh, G. (2015). Decentralised decision-making in a multi-party supply chain. International Journal of Production Research, 54(2), 405–425.
Wang, H., Guo, M., & Efstathiou, J. (2004). A game-theoretical cooperative mechanism design for a two-echelon decentralized supply chain. European Journal of Operational Research, 157(2), 372–388.
Wang, M., Zhang, R., & Zhu, X. (2017). A bi-level programming approach to the decision problems in a vendor-buyer eco-friendly supply chain. Computers & Industrial Engineering, 105, 299–312.
Yang, M.-H., & Bialas, W. (2007). Nash–Stackelberg equilibrium solutions for linear multidivisional multilevel programming problems. University at Buffalo Technical Report, Buffalo.
Yeh, K., Realff, M. J., Lee, J. H., & Whittaker, C. (2014). Analysis and comparison of single period single level and bilevel programming representations of a pre-existing timberlands supply chain with a new biorefinery facility. Computers & Chemical Engineering, 68, 242–254.
Yu, Y., Chu, F., & Chen, H. (2009a). A Stackelberg game and its improvement in a VMI system with a manufacturing vendor. European Journal of Operational Research, 192(3), 929–948.
Yu, Y., Huang, G. Q., & Liang, L. (2009b). Stackelberg game-theoretic model for optimizing advertising, pricing and inventory policies in vendor managed inventory (VMI) production supply chains. Computers & Industrial Engineering, 57(1), 368–382.
Yue, D., & You, F. (2014). Game-theoretic modeling and optimization of multi-echelon supply chain design and operation under Stackelberg game and market equilibrium. Computers & Chemical Engineering, 71, 347–361.
Yugang, Y., Liang, L., & Huang, G. Q. (2006). Leader–follower game in vendor-managed inventory system with limited production capacity considering wholesale and retail prices. International Journal of Logistics Research and Applications, 9(4), 335–350.
Zaman, F., Elsayed, S. M., Ray, T., & Sarker, R. A. (2017). Co-evolutionary approach for strategic bidding in competitive electricity markets. Applied Soft Computing, 51, 1–22.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1
Appendix 2
See Table 15.
Rights and permissions
About this article

Cite this article
Haque, M., Paul, S.K., Sarker, R. et al. A combined approach for modeling multi-echelon multi-period decentralized supply chain. Ann Oper Res 315, 1665–1702 (2022). https://doi.org/10.1007/s10479-021-04121-0
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10479-021-04121-0