
Abstract—
The choice of a transport and launch container (TLC) for analyzing the stress concentration in its elements does not reduce the generality of the proposed methodology for solving problems for other thin-walled structures. The TLC is, as a rule, a cylindrical glass with a spherical bottom, at the pole of which there is a rigid mounting plate. The TLС is loaded by the internal pressure during testing, along the round areas of the spherical bottom during transportation, and by the internal pressure during the launch of the aircraft supported on a rigid plate. In this work, for all cases of loading, design schemes are proposed and the places of localization of stresses in the TPС elements are determined, the sizes of localization and the magnitude of stress concentration are determined on the basis of mathematical models of the mechanics of deformation of shells with an a priori specified error, that is, analytically.
Similar content being viewed by others


1 INTRODUCTION
The problems of the strength of thin-walled structures in terms of the stress-strain state have a pronounced specificity. Weight perfection of structures can be achieved only with equal strength of all elements. However, the problem of improvement cannot have a final solution due to the infinite variety of possible designs for one purpose, manufacturing conditions, operation and possible, sometimes unpredictable, external influences.
The practice of operating thin-walled structures shows that destruction begins in places of stress concentration with the formation and catastrophic development of cracks. This phenomenon has a pronounced local character for each specific construction. As a rule, stress concentration points are known from the experience of testing and operation. They are caused by jumps in stiffness, fractures of the geometry of thin-walled elements and local external influences during the transfer of forces in structures. It is not possible to avoid local influences and transfer of loads to thin-walled elements. In such cases, we are faced with the problem of stress concentration and their determination becomes necessary. The task of the calculation is reduced to determining the dimensions of the stress concentration points, the nature of the stress distribution and, most importantly, the maximum stress values in these places.
Stress concentration as a physical phenomenon requires mathematical modeling and analysis of mathematical models in the form of differential equations. If linear differential equations of the mechanics of deformation of shells [1] are used as mathematical models, then it remains relevant to construct effective methods for their study with an a priori specified error, that is, analytically. Such tasks are solved during the design of the TLC. The solution for a given design does not reduce the generality of the methodology for the tasks posed, since the influence on the stress concentration in the shells of a stiffness jump (rigid plate - spherical shell), geometry fracture (spherical - cylindrical shell), local impact (along the areas of the spherical bottom) is investigated.
2 FORMULATION OF THE PROBLEM
The transport launch container has the following parameters.
The cylindrical shell is made of a layered orthotropic composite material. The relative sizes of the shell are \({{l}_{c}}{\text{/}}{{R}_{c}} = 1.6\) and \({{R}_{{\text{c}}}}{\text{/}}{{h}_{c}} = 25.92\). The relative elongation \({{l}_{c}}{\text{/}}{{R}_{c}}\) of the cylindrical part of the TLC is much higher. We limited ourselves to an elongation of 1.6, since even at this value, the boundary conditions did not affect the stresses at the places of their concentration. The mechanical characteristics for a laminated composite material package, which were obtained experimentally, have values along the generatrix of the shell E1 = 2.744 × 104 MPa, ν12 = 0.11 and along the circumferential coordinate E2 = 3.332 × 104 MPa, ν21 = 0.14, and G = 0.392 × 103 MPa.
The spherical shell is made of titanium, an isotropic material with mechanical characteristics E = 1.078 × 105 MPa, ν = 0.3, G = 4.15 × 104 MPa. Relative shell thickness is \({{R}_{{sf}}}{\text{/}}{{h}_{{sf}}} = 86\).
The calculations were carried out for the cases of operation of the TLC, when the load came to a small area of the spherical bottom, testing the TLC by internal pressure and launching an aircraft from it. Calculations determined with a controlled error, that is, analytically, the internal force factors [1] arising in its elements. Determined stresses and sizes of places of their concentration. Determined the influence of various parameters of the TLC on the maximum stress values.
2.1 Design Diagram of a Transport Launch Container and a Mathematical Model of Deformation Mechanics
The design scheme for the TLC is shown in Fig. 1. lc, Rc, hc are the length, radius, thickness of the cylindrical shell; Rsf, hsf are the radius and the thickness of the spherical shell; Rd is the radius of an absolutely hard disk at the pole of the spherical shell; R is the distance from the axis of the cylindrical shell to the center of the areas of external local action on the spherical shell; am is the size of the loading area of the shell by forces P, directed along the axis of the TLC, and moments M, acting in the meridional plane of the spherical bottom of the TLC. It also shows the positive directions of displacements and internal force factors for the shell.

Fig. 1.
The dimensionless parameters of the TLC and the load parameters that were taken in the calculations are as follows
Here am is the radius of the circle of the local impact areas.
The results were obtained for areas outlined by lines of main curvatures and rounds, provided that their areas are the same. The local impact on the spherical bottom is due to the mounting of the TLC in the stowed state.
The mathematical model of Vlasov [1] in the form of ordinary differential equations after separation of variables by the Fourier method of the mechanics of deformation of a cylindrical shell is represented in matrix form
Physical relations taking into account the representation of linear forces T1, S, Q1 and M1 in the form of Fourier series and adding the identities un = un, \({{{v}}_{n}}\) = \({{{v}}_{n}}\), wn = wn, \(w_{n}^{'}\) = \(w_{n}^{'}\) are represented in matrix form
Nonzero elements of the matrix G have the form:
When solving problems, for each number n of the harmonic, the functional coefficients \({{u}_{n}}\), \({{{v}}_{n}}\), \({{w}_{n}}\), \(w_{n}^{'}\), \({{T}_{{{\text{1}}n}}}\), \(S_{m}^{\text{*}}\), \(Q_{{{\text{1}}n}}^{*}\), M1n of trigonometric series of the sought-for quantities characterizing the state of the shell section at ξ = const are determined. The parameters \({{T}_{{2n}}}\) and M2n for the section φ = const are determined from the relations \({{\bar {T}}_{{1n}}} = d{{u}_{n}}{\text{/}}d\xi + \nu {\text{(}}n{{{v}}_{n}} + {{w}_{n}}{\text{)}}\), \(\overline {{{T}_{{{\text{2}}n}}}} = {v}d{{u}_{n}}{\text{/}}d\xi + n{{{v}}_{n}} + {{w}_{n}}\)
Then \(\overline {{{T}_{{{\text{2}}n}}}} = {v}\overline {{{T}_{{{\text{1}}n}}}} + (1 - {{{v}}^{2}})(n{{{v}}_{n}} + {{w}_{n}}{\text{)}}\), а \({{\overline T }_{{\text{2}}}} = \sum\limits_n {\overline {{{T}_{{{\text{2}}n}}}} {\text{cos}}(n\varphi )} \)
Similarly, \(\overline {{{M}_{{{\text{2}}n}}}} = {v}\overline {{{M}_{{{\text{1}}n}}}} + {{n}^{2}}({{{v}}^{2}} - 1){{w}_{n}}\), а \(\overline {{{M}_{{\text{2}}}}} = \sum\limits_n {\overline {{{M}_{{{\text{2}}n}}}} {\text{cos}}(n\varphi )} \)
Trigonometric series of the Fourier method of separation of variables begins at n = 1. The zero term n = 0 is omitted, since it corresponds to axisymmetric loading and deformation of the shell. n this case, the mathematical model consists of ordinary differential equations of the sixth order. In the matrix writing of equations, nonzero elements of the matrix А = \(\left\| {aij} \right\|_{1}^{6}\) are determined from the matrix А = \(\left\| {aij} \right\|_{1}^{8}\), if we set n = 0, and exclude \({{{v}}_{n}} = 0\) and \({v}_{n}^{'} = 0.\) from the column у. Then
The nonzero elements of the matrix G = \(\left\| {{{g}_{{ij}}}} \right\|_{1}^{6}\) are defined similarly
The mathematical model of the mechanics of deformation of a spherical shell, as well as a cylindrical shell, is written in matrix form with variable elements of the matrix A(θ). he nonzero elements of the matrices А(θ) and G(θ) of Eqs. (2.1) and (2.3) have the form:
wherein
When solving problems of mechanics of axisymmetric deformation of spherical shells, nonzero elements of matrices А(θ) and G(θ) have the form:
A mathematical model of the mechanics of deformation of an orthotropic cylindrical shell is not presented. The reason is that its use did not significantly affect the research results of interest to us.
2.2 Mathematical Modeling of Local Load
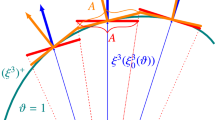
Modeling of a local loading area, the boundaries of which do not coincide with the lines of principal curvatures, is as follows [2].
Let us assume that the boundary of the load application area in the region of change of coordinates s, \(\varphi \) (\({{s}_{0}} \leqslant s \leqslant {{s}_{l}}\), \(0 \leqslant \varphi \leqslant 2{{\pi }}\)) of the original surface is described by the equation \(F(s,\varphi ) = 0\) for \({{s}_{1}} \leqslant s \leqslant {{s}_{2}}\), \({{\varphi }_{1}} \leqslant \varphi \leqslant {{\varphi }_{2}}\). The \(F(s,\varphi ) = 0\) curve can be split into separate sections, where its equation can be written in different ways. The equation \(F(s,\varphi ) = 0\) is resolved with respect to φ. n this case, the considered curve, which bounds the surface of the load application, is expediently represented as consisting of two sections described by the equations \({{\varphi }} = {{f}_{1}}(s)\) and \({{\varphi }} = {{f}_{2}}(s)\), Fig. 2.

Fig. 2.
These functions can be represented by different expressions for different intervals of variation of the argument s.
To determine the elements of the column \({{{\mathbf{f}}}_{n}}(S)\) of the right-hand side of the differential equation, it is necessary to expand the load acting on a given area into a Fourier series along the circumferential coordinate φ.
The applied load \({{q}_{x}}(s,\varphi )\) is represented as:
where the coefficients \({{A}_{n}}(s)\), \({{B}_{n}}(s)\) are determined as follows
Obviously, in (2.12) the limits of integration are functions of s. The coefficients An, Bn depend on the meridional coordinate s, which complicates the solution of the problem under consideration in comparison with the case when the shell is loaded along an area bounded by coordinate lines.
3 SOLUTION METHOD
3.1 Homogeneous Differential Equation
The solution of the homogeneous Eq. (2.1) with constant elements of the matrix A of the mechanics of deformation of a cylindrical shell, the length of which is \(\Delta x = {{x}_{n}} - {{x}_{0}}\), is determined analytically by the formula [3]
in the form of a converging series, which is the expansion of the matrix exponent in a Taylor series.
For a spherical shell with variable elements of the matrix A(θ) it is determined analytically by the formula [3]
3.2 3.2. Particular Solution
A particular solution for the right-hand side of an inhomogeneous differential equation is determined analytically by the formula
If in the differential equation A(θ) = A = const, f(θ) = f = const, then for the main interval [x0, xn] [4]
Analytical solutions of differential equations in the form of matrices of Cauchy-Krylov functions [5, 6] possess the multiplicative property [7], which is the basis of algorithms for studying stress concentration in TLC.
4 ANALYSIS OF THE RESULTS
4.1 Study of Stress Concentration in the Bottom
To study the stress concentration in the spherical bottom of the TLC from local action only by forces P and only moments M various design schemes were adopted, which are shown in Fig. 1 and Fig. 3.

Fig. 3.
The stress concentration was investigated using various algorithms. For the design scheme in Fig. 1, the stress-strain state was investigated by the multiplicative method [8], when the boundary value problem was reduced to the initial one at the places of stress concentration: the stress concentration was determined by solving the initial problem by the multiplicative method [9].
The stresses in the places of their concentration were investigated by the simplest methods of reducing the boundary value problems to the initial ones [8]. The initial conditions were formed at the edge of the spherical shell. The design scheme is shown in Fig. 3. Comparative numerical analysis showed that the shape of the site does not affect the concentration and magnitude of stresses.
The stresses were obtained by the multiplicative method for solving boundary value problems, bringing the boundary value problems to the initial ones at the place of stress concentration according to the calculation scheme in Fig. 1 and reducing the boundary value problem to the initial one according to the calculation scheme in Fig. 3. They practically coincided. It follows that the stresses in a spherical shell from local action do not depend on the stress-strain state of the conjugate cylindrical shell. The calculations were carried out both for an orthotropic cylindrical shell and one made of titanium. Replacing the material of the cylindrical shell with the stress concentration in the spherical shell did not affect.
As an example, Fig. 4 shows a graph of the change in the dimensionless linear bending meridional moment \({{M}_{S}}\pi {\text{/}}P\), passing through the center of the local impact area, Fig. 1. The origin of the relative value s/R of the s coordinate along the generatrix of the TLC coincides with the point of its intersection with an absolutely hard disk.

Fig. 4.
In Fig. 4, vertical lines mark the boundaries of the local impact area and show the cross-section of the conjugation of the spherical and cylindrical shells of the TLC. The letter а marks the results obtained on the basis of the calculation scheme in Fig. 3, letters b, c are the results obtained on the basis of the calculation scheme in Fig. 1, when the cylindrical shell is titanium or made of a composite material, respectively. Local impact is a uniform distribution of the force P over the area.
Figure 5 shows the values of \({{M}_{S}}\pi {\text{/}}P\), obtained when the area is exposed to а–both forces P and moment M, b—only forces P, c—only moment M based on the design scheme in Fig. 3.

Fig. 5.
Figure 6 shows the graphs of changes in stress σ in sections of a spherical shell at the outer surface along its zero meridian. The results were obtained using the design scheme in Figure 3. Letters mark the results obtained by а—under local action by force Р and moment М, b–under local action only by force Р, c—under local action only by force М.

Fig. 6.
Figure 7 shows the dependence of the values of the maximum stresses σ in dimensionless form at the outer surface of the spherical shell on the relative value \(F{\text{/}}{{F}_{0}}\) of the area F of the local action by the force Р. F0 was determined for an area with a relative value of its radius \({{a}_{m}}{\text{/}}{{R}_{\partial }} = 0.167\). Otherwise, it shows the dependence of the maximum stresses with an increase in the area of the local impact to a given value.

Fig. 7.
In the calculations, all parameters of the state of the sections of the TLC shells were determined under local action along the area outlined by a circle, as well as along the area outlined by the lines of principal curvatures. The results coincided with equal sizes of areas, regardless of their shape.
4.2 Study of Stress Concentration Under Internal Pressure
The design scheme is shown in Fig. 8. Boundary conditions are: Nz = 0, ux = 0, ϑs = 0 at s = 0; ux = 0, uz = 0, ϑs = 0 at s = sk. Origin of coordinate s at the point of intersection of the TLC generatrix with a solid disk. Some of the results are shown in graphs. In these figures, the vertical line marks the cross-section of the conjugation of the spherical and cylindrical shells of the TLC.

Fig. 8.
In order to assess the influence of the boundary conditions on the stress concentration at the fracture of the geometry of the TLC shell, that is, at the junction of the spherical and cylindrical shells, the calculations were performed at \({{S}_{k}}{\text{/}}{{R}_{c}} = 1.59\) and Sk/Rc = 3.9.
Figures 9 and 10 show in the form of graphs the change in the dimensionless stress σ in the sections of the TLC at the outer surface. In Figure 9а shows stresses in titanium TLC shells, b shows cylindrical TLC shell made of composite material.

Fig. 9.

Fig. 10.
Figure 10 shows a cylindrical shell made of a composite material. Comparative analysis of the results shows an insignificant influence of the boundary conditions.
4.3 Research at the Launch of an Aircraft
Figure 11 shows the design diagram. TLC is supported by a solid disk on a rigid base. The pressure that is generated in the TLC pushes the aircraft like a piston out of a cylinder. Consequently, the left boundary conditions have the form of a rigid termination ux = 0, uz = 0, \(\vartheta \)s = 0, and for the right free boundary, the conditions have the form Nx = 0, Nz = 0, Ms = 0.

Fig. 11.
The tasks were solved for TLC made of titanium and for TLC, in which the cylindrical shell is made of composite material. All quantities characterizing the stress-strain state of the TLC were determined. Some results are shown in the form of graphs in Figs. 12 and 13. The vertical line marks the place where the spherical and cylindrical TLC shells meet.

Fig. 12.

Fig. 13.
In Figure 12, the letter а denotes dimensionless stresses for titanium TLC. If the cylindrical shell is a composite material, the results are indicated by the letter b.
Comparative analysis of the results shown in the form of graphs in Figs. 12 and 13 shows the stress concentration at the solid disk of the TLC and shows that these stresses are not influenced by the right boundary conditions. Consequently, the study of stresses in places of their concentration is possible with the help of the simplest algorithms for forming the corresponding initial conditions and solving the initial problem by the multiplicative method [8, 9].
5 CONCLUSIONS
In order to achieve a possible weight perfection with the adopted design solutions, a study of a thin-walled structure, a transport and launch container, according to the stress state was carried out. The author’s technique and effective research algorithms allow using a computer to analytically determine the locations of stress localization and their maximum values with a controlled error on the basis of known mathematical models of the mechanics of deformation of thin-walled structural elements. The results of the study make it possible to reasonably reduce the value of the safety factor of a thin-walled structure, a transport and launch container, and, consequently, to reduce its weight.
REFERENCES
V. Z. Vlasov, Selected Works, Vol. 1 (AN SSSR, Moscow, 1962) [in Russian].
Ya. M. Grigorenko and A. T. Vasilenko, Problems on the Statics of Anisotropic Nonuniform Shells (Nauka, Moscow, 1992) [in Russian].
Y. I. Vinogradov, “Solution method for linear ordinary differential equations,” Dokl. Math. 74, 480–483 (2006). https://doi.org/10.1134/S106456240604003X
Yu. I. Vinogradov and G. B. Menkov, “Modification of the multiplicative method for solving a class of boundary value problems in structural mechanics of aerospace systems limited by the Fourier method of separation of variables,” in Materials of the XXI International Conference on Computational Mechanics and Modern Applied Software Systems (CMMASS-2019) (MAI, Moscow, 2019), pp. 40–42.
A. Yu. Vinogradov and Yu. I. Vinogradov, “Cauchy-Krylov functions and algorithms for solving boundary value problems in mechanics of shells,” Dokl. Phys. 45, 620–622 (2000). https://doi.org/10.1134/1.1333870
A. N. Krylov, About Calculation of Beams Laying on an Elastic Base (Akad. Nauk SSSR, Leningrad, 1931).
F. R. Gantmacher, Theory of Matrices (Chelsea Pub. Co., New York, 1959; Nauka, Moscow, 1988).
Yu. I. Vinogradov, “Methods for investigation of stress concentrations in thin-walled structures by reduction of boundary value problems to initial value problems,” Dokl. Phys. 51, 676–679 (2006). https://doi.org/10.1134/S102833580612010X
Yu. I. Vinogradov and V. I.Petrov, “High-performance methods for investigation stress concentration in shells using mathematical models of their deformation mechanics and reduction of the boundary problem to the problem with initial conditions,” Mat. Model. 18 (9), 121–128 (2006).
Funding
This work was supported by the Russian Foundation for Basic Research, grant no. 18-08-00840/18.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by I. K. Katuev
About this article

Cite this article
Vinogradov, Y.I. Analysis of Stress Concentration with a Controlled Error in Thin-Walled Structures (Transport and Launch Container). Mech. Solids 56, 230–241 (2021). https://doi.org/10.3103/S002565442102014X
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S002565442102014X