
Abstract
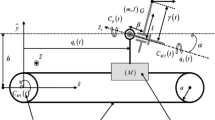
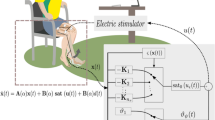
Over the last few decades, the appearance of robot applications has been continuously increasing in rehabilitation treatment due to the increasing numbers of stroke patients. In this paper, a novel fractional-order active fault-tolerant controller (FOAFTC) based on an adaptive nonlinear observer is proposed to detect, estimate, and compensate faults of a knee joint orthosis. The controlling term is derived based on the fractional-order sliding mode control (FOSMC) approach, while the switching term of this controller is designed by the fractional-order interval type-2 fuzzy logic control (IT2FLC) technique. In this regard, a nonlinear disturbance observer (NDO) is combined with this controller to estimate the muscular torque inserted by the patient, while increasing the accuracy and speed of the system performance. Adopting the Lagrange equations, a unique model is presented for the orthosis and the human lower-limb. The proposed strategy reduces modeling difficulties and the chattering phenomenon of the SMC technique. Additionally, the number of rules in the fuzzy controller is decreased as well. Following on, the closed-loop system stability is proved theoretically. Finally, the system performance based on the suggested controller is evaluated and compared with the results of two other different controllers including the conventional SMC and the fractional-order terminal sliding mode controller. Implying the proposed controller to the system leads to the smaller frequency and magnitude of the chattering effects, which provides more convenience for patients. Moreover, the efficiency of the suggested controller is illustrated in the presence of both actuator and sensor faults.
Similar content being viewed by others

References
Yan, T., Cempini, M., Oddo, C.M., Vitiell, N.: Review of assistive strategies in powered lower limb orthoses and exoskeletons. Robot. Auton. Syst. 64, 120–136 (2015)
Huo, W., Mohammed, S., Moreno, J.C., Amirat, Y.: Lower limb wearable robots for assistance and rehabilitation: a state of the art. IEEE Syst. J. 10(3), 1068–1081 (2013)
Jimenez-Fabian, R., Verlinden, O.: Review of control algorithms for robotic ankle systems in lower-limb orthoses, prostheses, and exoskeletons. Med. Eng. Phys. 34(4), 397–408 (2012)
Mefoued, S.: A second order sliding mode control and a neural network to drive a knee joint actuated orthosis. Neurocomputing. 155, 71–79 (2015)
Monje, C.A., Vinagre, B.M., Feliu, V., Chen, Y.Q.: Tuning and auto-tuning of fractional-order controllers for industry applications. Control Eng. Practice. 16(7), 798–812 (2008)
Pashaei, S., Badamchizadeh, M.: A new fractional-order sliding mode controller via a nonlinear disturbance observer for a class of dynamical systems with mismatched disturbances. ISA Trans. 63, 39–48 (2016)
Chao, C., Teng, C.: A PD-like self-tuning fuzzy controller without steady-state error. Fuzzy Sets Syst. 87, 141–154 (1997)
Mendel, J.M.: Type-2 fuzzy sets and systems: an overview. IEEE Comput Intell. 2(2), 20–29 (2007)
Castillo, O., Melin, P.: Type-2 fuzzy logic: theory and application. Studfuzz. 223, 145–145 (2008)
Mendel, J.M., John, R.I., Feilong, L.: Interval type-2 fuzzy logic systems made simple. IEEE Trans. Fuzzy Syst. 14, 808–821 (2006)
Liang, Q., Mendel, J.M.: Interval type-2 fuzzy logic systems: theory and design. IEEE Trans. Fuzzy Syst. 8, 535–550 (2000)
Hongyi, L., Chengwei, W., Peng, S.: Control of nonlinear networked systems with packet dropouts:interval type-2 fuzzy model-based approach. IEEE Transybern. 45, 2378–2389 (2015)
Mohadeszadeh, M., Delavari, H.: Synchronization of uncertain fractional-order hyper-chaotic systems via a novel adaptive interval type-2 fuzzy active sliding mode controller. Int J Dynamics Control. 5(1), 135–144 (2017)
Hongyi, L., Xingjian, S., Ligang, W., Lam, H.: State and output feedback control of aclass of fuzzy systems with mismatched membership functions. IEEE Trans. Fuzzy Syst. 23, 1943–1957 (2015)
Heydarinejad, H., Delavari, H., Baleanu, D.: Fuzzy type-2 fractional Backstepping blood glucose control based on sliding mode observer. Int J Dynamics Control. 7, 341–354 (2019)
Khari, S., Rahmani, Z., Rezaie, B.: Designing fuzzy logic controller based on combination of terminal sliding mode and state feedback controllers for stabilizing chaotic behaviour in rod-type plasma torch system. Trans. Inst. Meas. Control. 38(2), 150–164 (2016)
Rezaie, B., Ghasemi, H., Rahmani, Z.: Terminal Sliding Mode Controller Tuned Using Evolutionary Algorithms for Finite-Time Robust Tracking Control in a Class of Nonholonomic Systems. J. Inform. Technol. Control. 47(1), 26–44 (2018)
Bkekri, R., Benamor, A., Alouane, M.A., Fried, G., Messaoud, H.: robust adaptive sliding mode control for a human-driven knee joint orthosis. Indust. Robot. 45(3), 379–389 (2018)
Mefoued, S., Eddine, D., Belkhiat, C.: A Robust Control Scheme Based on Sliding Mode Observer to Drive a Knee-Exoskeleton. Asian J. Control. 21(1), 439–455 (2019)
Isermann, R.: Model-based fault-detection and diagnosis – status and applications. Annu. Rev. Control. 29(1), 71–85 (2005)
Zeghlache, S., Benslimane, T., Bouguerra, A.: Active fault-tolerant control based on interval type-2 fuzzy sliding mode controller and non linear adaptive observer for 3-DOF laboratory helicopter. ISA Trans. 71, 280–303 (2017)
Zhang, Y.M., Jiang, J.: Bibliographical review on reconfigurable fault-tolerant control. Annu. Rev. Control. 32(2), 229–252 (2008)
Xiang, Y., Jiang, J.: A survey of fault-tolerant controllers based on safety-related issues. Annu. Rev. Control. 39, 46–57 (2015)
Mohammed, S., Huo, W., Huang, J., Rifaï, H., Amirat, Y.: Nonlinear disturbance observer based sliding mode control of a human-driven knee joint orthosis. Robot. Auton. Syst. 75, 41–49 (2016)
Wu, J., Huang, J., Wnag, Y.J., Xing, K.X.: Nonlinear disturbance observer based dynamic surface control for trajectory tracking of pneumatic muscle system. IEEE Trans. Control Syst. Technol. 22(2), 440–455 (2014)
A. Tepljakov, E. Petlenkov, J. Belikov.”Robust FOPI and FOPID controller design for FFOPDT plants in embedded control application susing frequency-domain analysis”. In: Proceedings of American control conference, Chicago,USA, pp. 3868–73, 2015
Pourmahmood Aghababa, M.: Design of a chatter-free terminal sliding mode controller for nonlinear fractional-order dynamical systems. Int. J. Control. 86, 1744–1756 (2013)
Yan, L., Chen, Y.Q., Podlubny, I.: Mittag–Leffler stability of fractional-order non-linear dynamic systems. Automatica. 45, 1965–1969 (2009)
Yan, L., Chen, Y.Q., Podlubny, I.: Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag–Leffler stability. Comput. Math. Appl. 59, 1810–1821 (2010)
Rifaï, H., Mohammed, S., Djouani, K.Y.A.: Toward lower limbs functional rehabilitation through a knee-joint exoskeleton. IEEE. Trans. Control Syst. Technol. 25(2), 712–719 (2017)
El-Nagar, A.M., El-Bardini, M., El-Rabaie, N.M.: Intelligent control for nonlinear inverted pendulum based on interval type-2 fuzzy PD controller. Alexandria Eng. J. 1, 23–32 (2014)
Castillo, O., Melin, P.: A review on the design and optimization of interval type-2 fuzzy controllers. Appl. Soft Comput. 12, 1267–1278 (2012)
H. Delavari, R. Jokar. "Fractional-order adaptive fuzzy terminal sliding mode controller design for a knee joint orthosis with nonlinear disturbance observer." In Control, Instrumentation, and Automation (ICCIA), 2017 5th International Conference on, pp. 49–54. IEEE, 2017
Aguila-Camacho, N., Duarte-Mermoud, M.A., Gallegos, J.A.: Lyapunov functions for fractional-order systems. Commun. Nonlinear Sci. Numer. Simul. 19, 2951–2957 (2014)
Jiang, B., Staroswiecki, M., Cocquempot, V.: Fault accommodation for nonlinear dynamic systems. IEEETrans. Autom. Control. 51, 1587–1583 (2006)
Efe, M.O.: Fractional fuzzy adaptive sliding mode control of 2-DOF direct-drive robot arm. IEEE Trans Syst Man Cybern Part B Cybern. 38(6), 1561–1570 (2008)
Delavari, H., Lanusse, P., Sabatier, J.: Fractional-order controller design for a flexible link manipulator robot. Asian J. Control. 15(3), 783–795 (2013)
Availability of Data and Materials
The data will be available by request after the publication of this paper.
Author information
Authors and Affiliations
Contributions
Hadi Delavari: Writing the original draft, editing and reviewing, methodology, conceptualization, and supervision. Roya Jokar: Writing the original draft, simulation programming, conceptualization, methodology.
Corresponding author
Ethics declarations
Ethical Approval
Not applicable.
Consent to Participate
Not applicable.
Consent to Publish
Authors give their consent to the Springer pulisher to publish this article in Jounral of intelligent and robotic systems.
Competing Interests
The authors declare no conflict of interest regarding the publication of this paper.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Delavari, H., Jokar, R. Intelligent Fractional-Order Active Fault-Tolerant Sliding Mode Controller for a Knee Joint Orthosis. J Intell Robot Syst 102, 39 (2021). https://doi.org/10.1007/s10846-021-01382-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10846-021-01382-6