
Nonparametric Frequency Response Identification for Dc-Dc Converters Based on Spectral Analysis with Automatic Determination of the Perturbation Amplitude


Abstract
:1. Introduction
- Modifying the spectrum amplitude of the perturbation signal by using a pre-emphasis filter [4,31] or performing separate tests with colored noise signals [13]. This way, the frequency components where the system exhibits high attenuation are amplified. For example, in many power converters it is useful to amplify the perturbation high frequency content, because the system behaves as a low pass filter. However, this solution requires specific knowledge of the system’s dynamic response and the implementation of two filters (pre-emphasis and de-emphasis) [4,5]. In this work we do not apply additional filters or colored signals but propose a novel procedure to automatically determine a suitable PRBS amplitude.
- Truncating the impulse response [5]. Cross-correlation methods are usually applied with PRBS excitation, and the result of this nonparametric identification technique is the impulse response. A smoother Bode plot is obtained by truncating such impulse response [5] to eliminate the noisy samples that will produce an irregular frequency response plot. The main disadvantage of this solution is that it requires a perturbation signal long enough to ensure that the truncation only impacts the Bode plot’s noise and does not eliminate part of the system’s dynamic response. Therefore, some knowledge of the system under test is convenient. In this work we use the impulse response as a tool to calculate the most suitable amplitude of the PRBS. The system identification is done using spectral analysis (Fourier analysis of the input and output signals) without requiring any knowledge of the system under test.
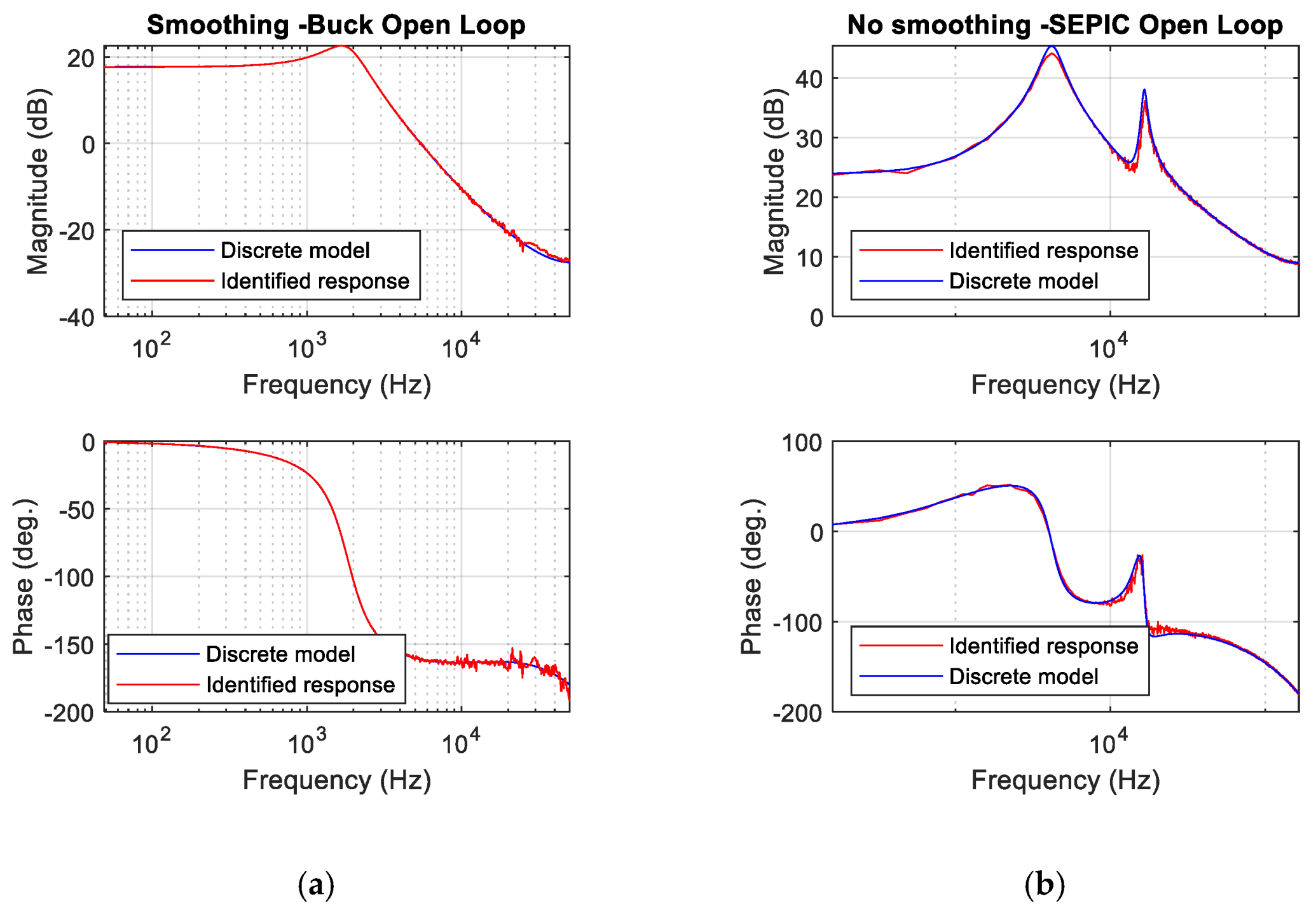
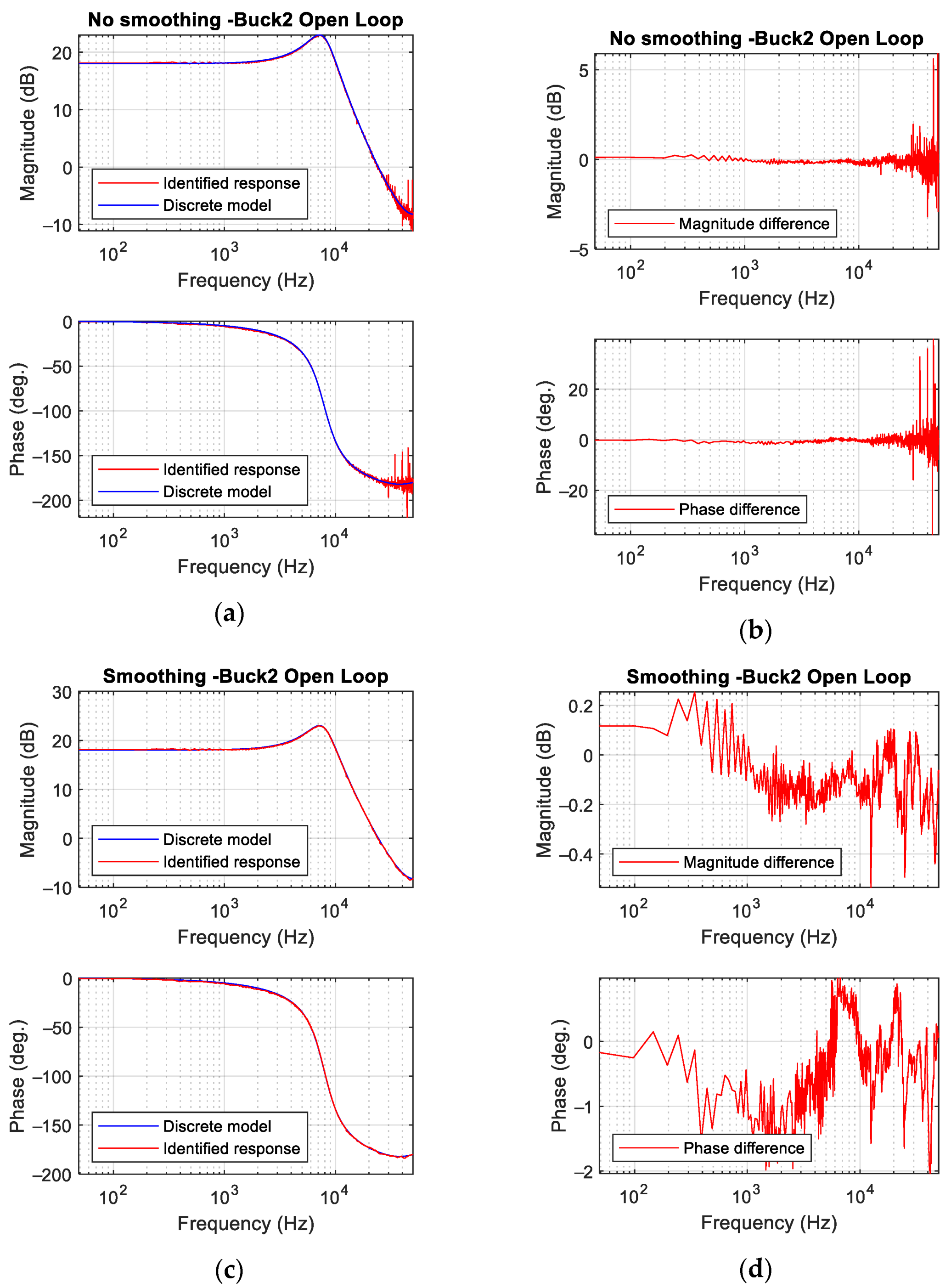
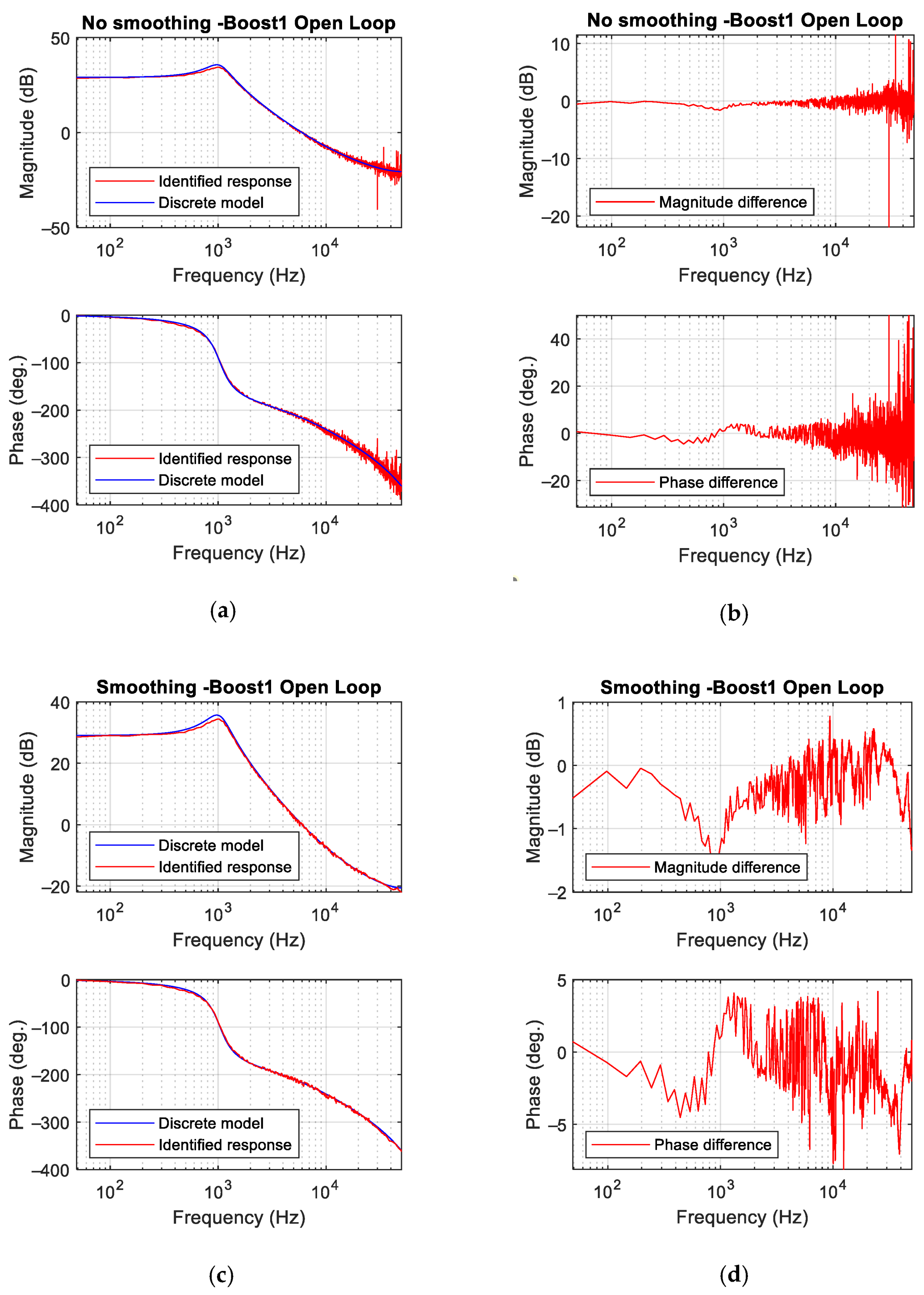
- Applying a smoothing filter to the identified Bode plot [13,32]. This easy postprocessing solution is particularly effective for identifying systems that behave as low-pass filters since the noise is usually at high frequency, where there are more frequency components due to the logarithmic representation. Of course, it is essential to ensure that the smoothing filter does not affect the identified system’s dynamic. In this work, because of the accurate synchronization of all the processes in the SoC digital platform, as well as the automatic calculation of the PRBS amplitude, the identification results are good even skipping the smoothing filter. Thus, in our proposal this step is optional.
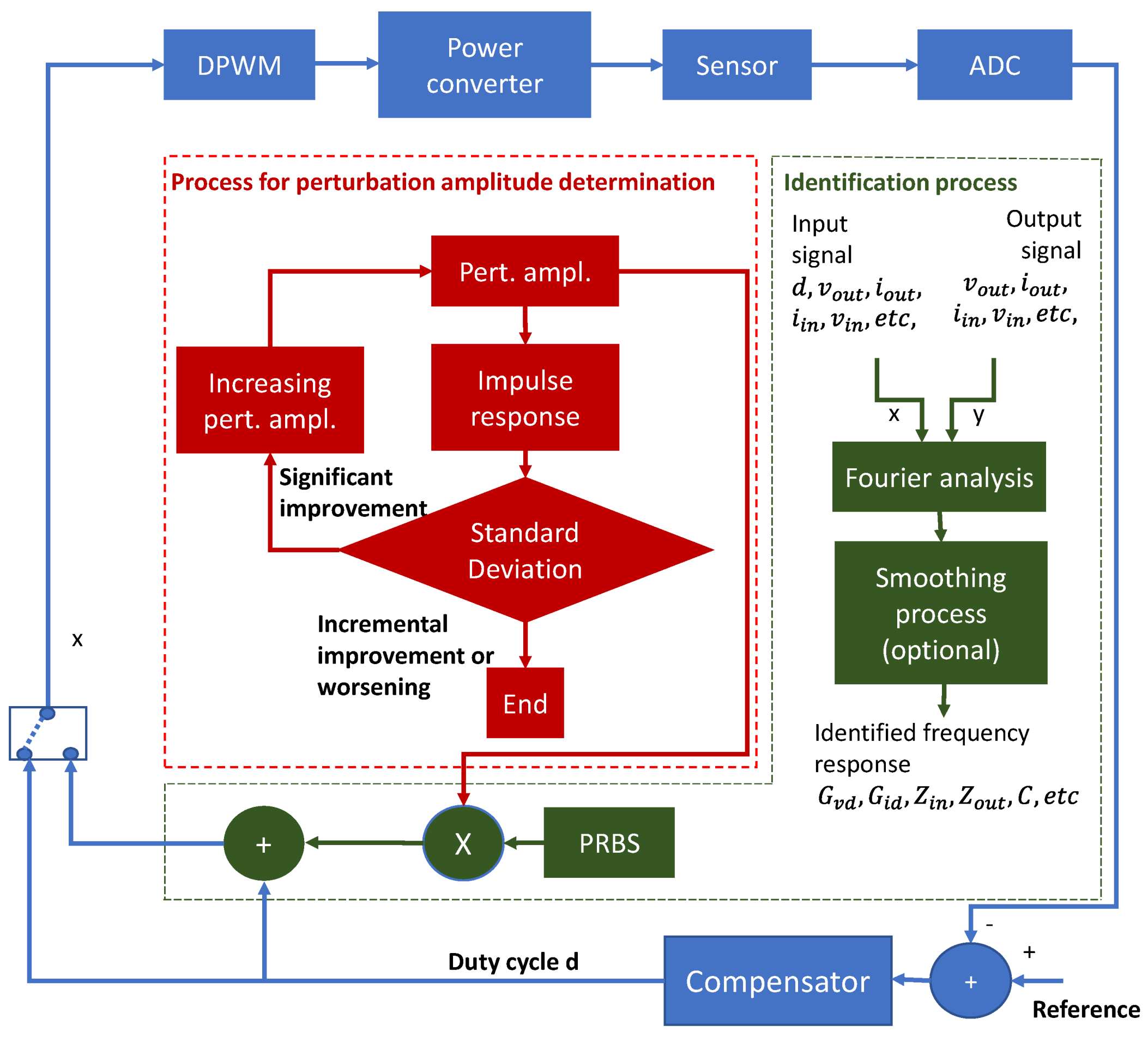
2. Proposed Identification Methodology
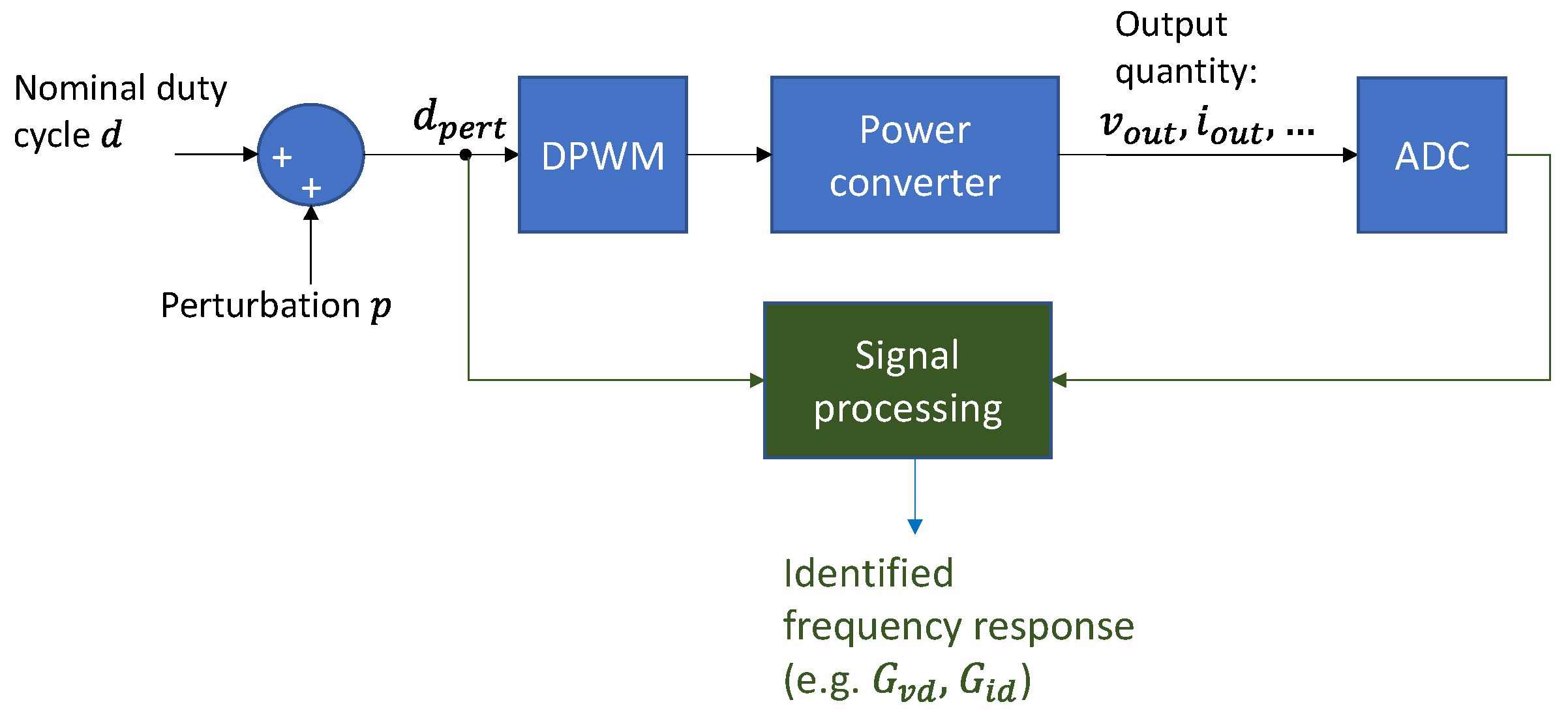
2.1. Determination of the Amplitude of the Perturbation Signal
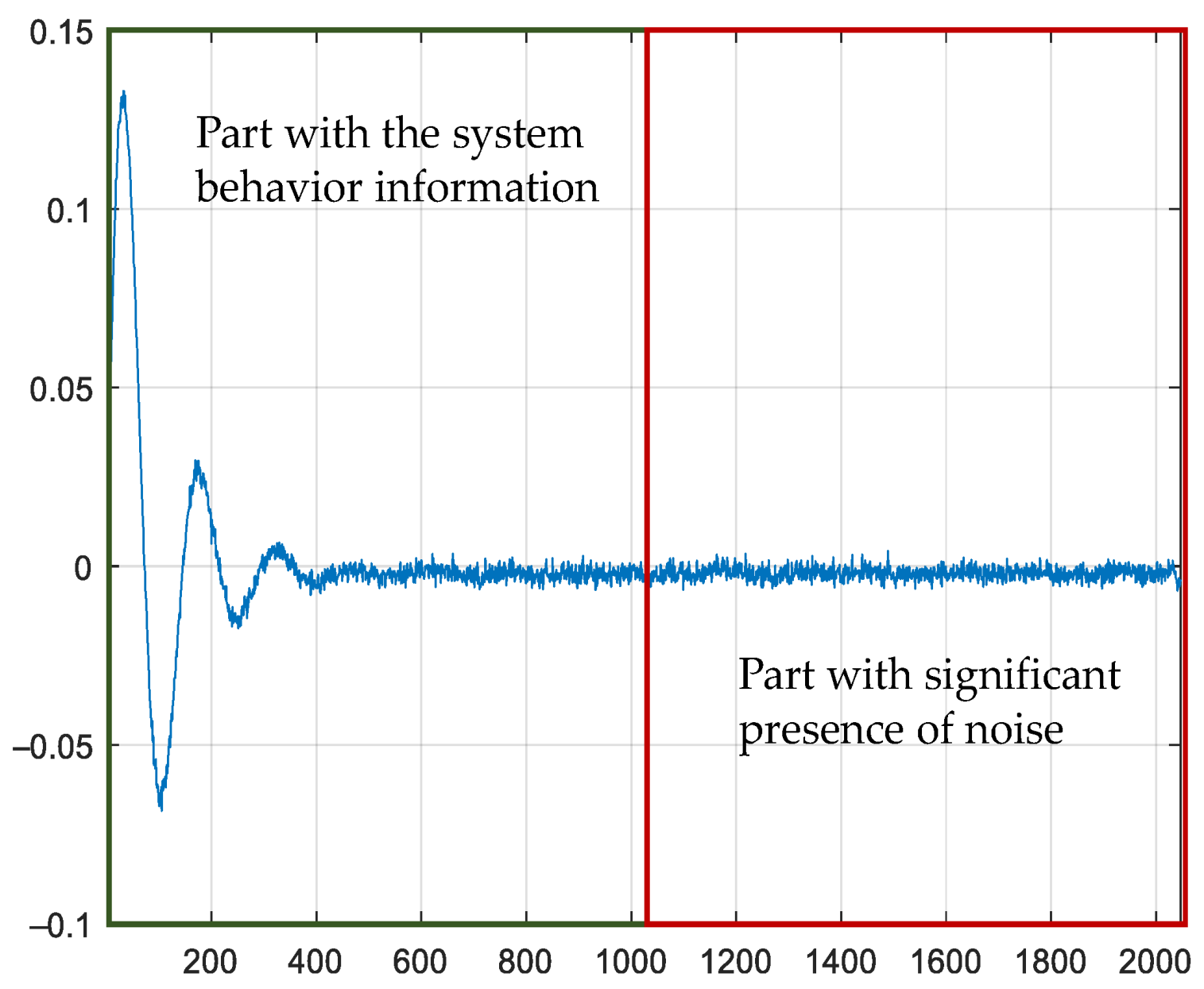
2.1.1. Identification of the Impulse Response to Characterize the Impact of the Noise
- The first area is the one that contains the information about the system dynamics.
- The second zone is the one that would ideally be close to zero, but this does not happen due to the presence of noise. The length of this zone depends on the length of the PRBS. It is essential to ensure that the PRBS has enough bits to identify the system’s dynamics and a small zone with no dynamics.
2.1.2. Quantification of the Impact of the Noise
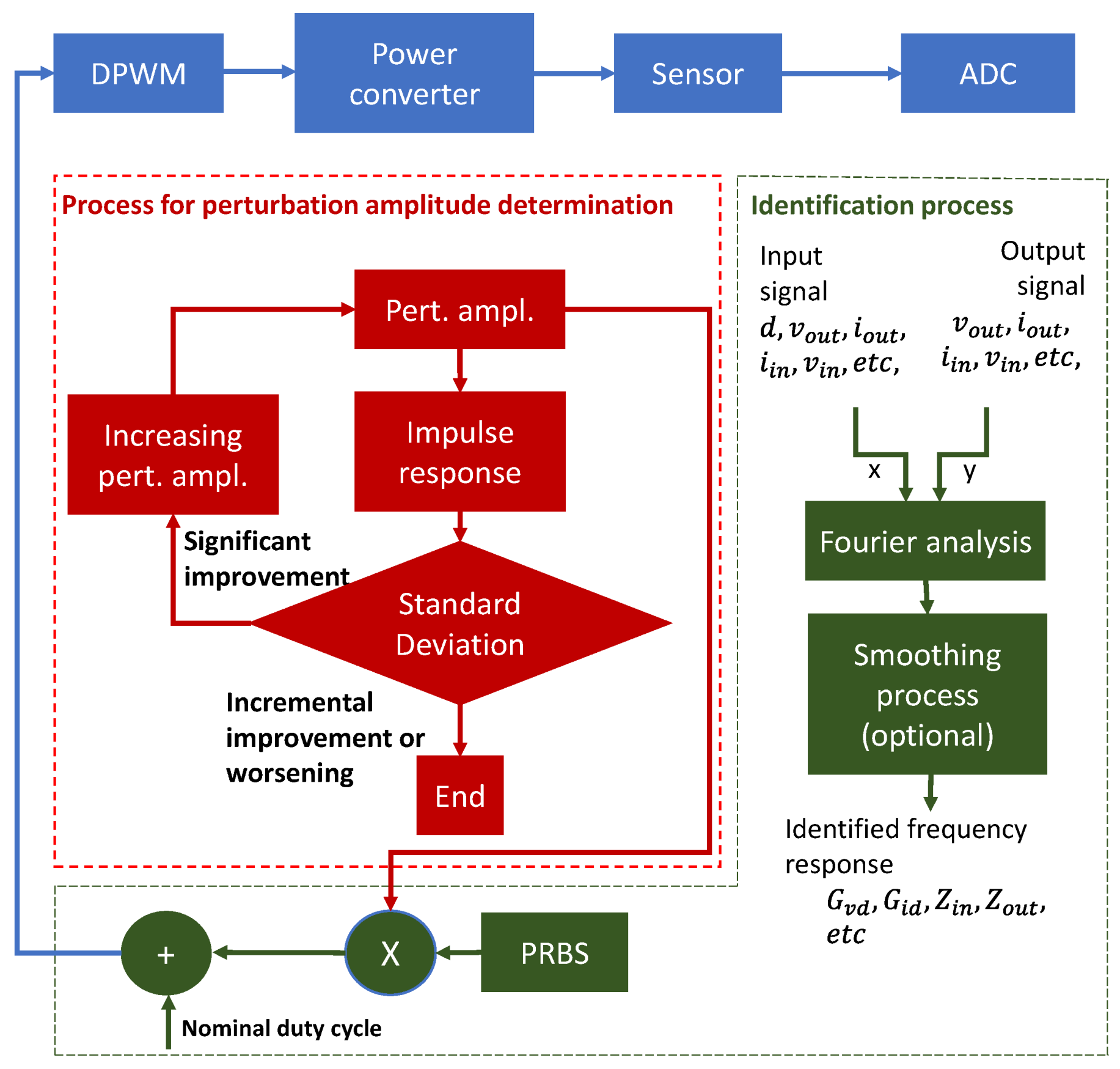
2.1.3. Analysis of the Standard Deviation of the Second Part of the Impulse Response
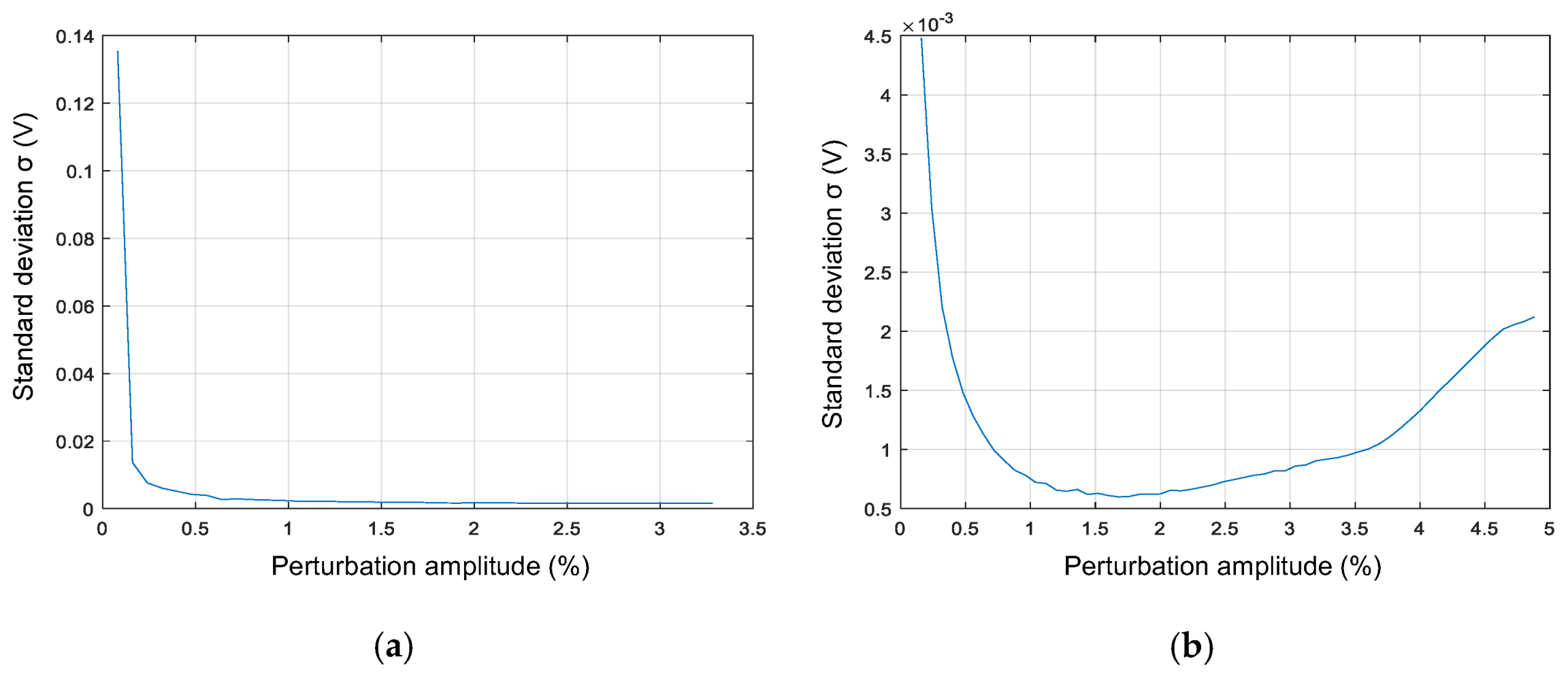
- The reduction of σ is minimum in the last iterations, and therefore, increasing the amplitude of the perturbation signal has a negligible impact on improving the identification result. This is the expected case in converters with a reasonably linear dynamic behavior, such as the buck converter, Figure 3a.
- The standard deviation increases with the amplitude of the perturbation. This is expected in converters with a dynamic behavior dependent on the working point, such as the boost converter, reaching the results shown in Figure 3b.
2.2. System Identification Using Spectral Analysis
2.3. Postprocessing of the Measure: Smoothing Process
- Fourier analysis: this block applies the FFT to its input signals and calculates the difference among the transformed signals to obtain the frequency response. Expression (3) is a particular case of this block when the input signals are the perturbed duty cycle and the output voltage.
- Smoothing process: it consists of the application of moving median and expressions (10) and (11) to the frequency response obtained in the block “Fourier analysis”.
- The block impulse response applies expression (4) to the PRBS and another signal. In this particular work we have chosen the output voltage to be cross-correlated with the PRBS.
- The standard deviation analysis block applies expression (5) to the impulse response calculated in the previous block.
2.4. Simulation of the Identification Procedure
3. Results
3.1. Validation of the Implemented System to Automatically Determine the Amplitude of the Perturbation Signal
3.2. Validation of the Implemented Identification System
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chandwani, A.; Dey, S.; Mallik, A. Cybersecurity of Onboard Charging Systems for Electric Vehicles—Review, Challenges and Countermeasures. IEEE Access 2020, 8. [Google Scholar] [CrossRef]
- Rodríguez, M.; Stahl, G.; Corradini, L.; Maksimović, D. Smart DC power management system based on software-configurable power modules. IEEE Trans. Power Electron. 2013, 28, 1571–1586. [Google Scholar] [CrossRef]
- Rodríguez, J.; Lamar, D.G.; Aller, D.G.; Miaja, P.F.; Sebastián, J. Efficient visible light communication transmitters based on switching-mode dc-dc converters. Sensors 2018, 18, 1127. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Al-Greer, M.; Armstrong, M.; Ahmeid, M.; Giaouris, D. Advances on System Identification Techniques for DC–DC Switch Mode Power Converter Applications. IEEE Trans. Power Electron. 2019, 34, 6973–6990. [Google Scholar] [CrossRef] [Green Version]
- Shirazi, M.; Morroni, J.; Dolgov, A.; Zane, R.; Maksimovic, D. Integration of Frequency Response Measurement Capabilities in Digital Controllers for DC/DC Converters. IEEE Trans. Power Electron. 2008, 23, 2524–2535. [Google Scholar] [CrossRef]
- Luhtala, R.; Messo, T.; Roinila, T.; Alenius, H.; De Jong, E.; Burstein, A.; Fabian, A. Identification of three-phase grid impedance in the presence of parallel converters. Energies 2019, 12, 2674. [Google Scholar] [CrossRef] [Green Version]
- Fernandez, C.; Zumel, P.; Granda, M.; Sanz, M.; Lazaro, A.; Barrado, A. Automated calculation of the compensator based on the online identification of the plant operating in closed loop. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition—APEC, Tampa, FL, USA, 26–30 March 2017; pp. 1183–1187. [Google Scholar]
- Morroni, J.; Zane, R.; Maksimović, M.D. Design and implementation of an adaptive tuning system based on desired phase margin for digitally controlled DC-DC converters. IEEE Trans. Power Electron. 2009, 24, 559–564. [Google Scholar] [CrossRef]
- Bhardwaj, M.; Choudhury, S.; Poley, R.; Akin, B. Online Frequency Response Analysis: A Powerful Plug-in Tool for Compensation Design and Health Assessment of Digitally Controlled Power Converters. IEEE Trans. Ind. Appl. 2016, 52, 2426–2435. [Google Scholar] [CrossRef]
- Morroni, J.; Dolgov, A.; Shirazi, M.; Zane, R.; Maksimovic, D. Online Health Monitoring in Digitally Controlled Power Converters. In Proceedings of the 2007 IEEE Power Electronics Specialists Conference, Orlando, FL, USA, 17–21 June 2007; pp. 112–118. [Google Scholar]
- Beohar, N.; Malladi, V.N.K.; Mandal, D.; Ozev, S.; Bakkaloglu, B. Online Built-In Self-Test of High Switching Frequency DC-DC Converters Using Model Reference Based System Identification Techniques. IEEE Trans. Circuits Syst. I Regul. Pap. 2018, 65, 818–831. [Google Scholar] [CrossRef]
- Locorotondo, E.; Corti, F.; Pugi, L.; Berzi, L.; Reatti, A.; Lutzemberger, G. Design of aWireless Charging System for Online Battery Spectroscopy. Energies 2021, 14, 218. [Google Scholar] [CrossRef]
- Gücin, T.N.; Ovacik, L. Online Impedance Measurement of Batteries Using the Cross-Correlation Technique. IEEE Trans. Power Electron. 2020, 35, 4365–4375. [Google Scholar] [CrossRef]
- Corradini, L.; Maksimović, D.; Mattavelli, P.; Zane, R. Digital Control of High-Frequency Switched-Mode Power Converters; Wiley-IEEE Press: Hoboken, NJ, USA, 2015; ISBN 9781119025498. [Google Scholar]
- Solomou, M.; Evans, C.; Rees, D. Crest factor minimization in the frequency domain. IEEE Trans. Instrum. Meas. 2002, 51, 859–865. [Google Scholar] [CrossRef]
- Fernández, C.; Fernández-Herrero, A.; Zumel, P.; Lázaro, A.; Barrado, A. Measuring Bode plots of switching power converters from a single simulation in the time domain: Application to a digital control implemented on an FPGA. In Proceedings of the 2010 IEEE 12th Workshop on Control and Modeling for Power Electronics, COMPEL 2010, Boulder, CO, USA, 28–30 June 2010. [Google Scholar]
- Fernández, C.; Zumel, P.; Fernández-Herrero, A.; Sanz, M.; Lázaro, A.; Barrado, A. Frequency response of switching DC/DC converters from a single simulation in the time domain. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition—APEC, Fort Worth, TX, USA, 6–11 March 2011. [Google Scholar]
- Fernández-Herrero, A.; Fernández, C.; Carreras, C.; Zumel, P.; Lázaro, A.; Barrado, A. Use of multisine excitations for frequency-response measurement of nonlinear DC-DC switching converters. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition—APEC, Orlando, FL, USA, 5–9 February 2012. [Google Scholar]
- Manuel, A.; Ramos, R.; Sanchez, F.; Guinjoan, F.; Poveda, A. Computer based waveform synthetizer for switching regulators characterization. In Proceedings of the 8th Mediterranean Electrotechnical Conference on Industrial Applications in Power Systems, Computer Science and Telecommunications (MELECON 96), Bari, Italy, 16 May 1996; Volume 1, pp. 505–508. [Google Scholar]
- Firouz, Y.; Omar, N.; Goutam, S.; Timmermans, J.-M.; den Bossche, P.V.; Mierlo, J.V. Measuring and Analysis of Nonlinear Characterization of Lithium-Ion Batteries Using Multisin Excitation Signal. World Electr. Veh. J. 2016, 8, 362–370. [Google Scholar] [CrossRef] [Green Version]
- Miao, B.; Zane, R.; Maksimović, D. Automated digital controller design for switching converters. In Proceedings of the 2005 IEEE 36th Power Electronics Specialists Conference, Dresden, Germany, 16 June 2005; pp. 2729–2735. [Google Scholar] [CrossRef]
- Shirazi, M.; Zane, R.; Maksimovic, D. An Autotuning Digital Controller for DC/DC Power Converters Based on Online Frequency-Response Measurement. IEEE Trans. Power Electron. 2009, 24, 2578–2588. [Google Scholar] [CrossRef]
- Alenius, H.; Roinila, T. Impedance-based stability analysis of paralleled grid-connected rectifiers: Experimental case study in a data center. Energies 2020, 13, 2109. [Google Scholar] [CrossRef]
- Miao, B.; Zane, R.; Maksimović, D. System identification of power converters with digital control through cross-correlation methods. IEEE Trans. Power Electron. 2005, 20, 1093–1099. [Google Scholar] [CrossRef]
- Algreer, M.M.S.F. Microprocessor Based Signal Processing Techniques for System Identification and Adaptive Control of DC-DC Converters. Ph.D. Thesis, Newcastle University, Newcastle upon Tyne, UK, 2012. [Google Scholar]
- Agrawal, N.; Samanta, S. Development of System-On-Chip Based Digital Control for Power Converter Application. In Proceedings of the 2018 IEEE International Conference on Power Electronics, Drives and Energy Systems, PEDES 2018, Chennai, India, 18–21 December 2018; pp. 1–4. [Google Scholar]
- Corrêa, T.P.; Rodríguez, F.J.; Bueno, E.J. Model-based latency compensation for network controlled modular multilevel converters. Electronics 2019, 8, 22. [Google Scholar] [CrossRef] [Green Version]
- Zafra, E.; Vazquez, S.; Miranda, H.G.; Sanchez, J.A.; Marquez, A.; Leon, J.I.; Franquelo, L.G. Efficient FPSoc prototyping of FCS-MPC for three-phase voltage source inverters. Energies 2020, 13, 1074. [Google Scholar] [CrossRef] [Green Version]
- Davidson, J.N.; Stone, D.A.; Foster, M.P. Real-time prediction of power electronic device temperatures using PRBS-generated frequency-domain thermal cross coupling characteristics. IEEE Trans. Power Electron. 2015, 30, 2950–2961. [Google Scholar] [CrossRef] [Green Version]
- Tan, A.H.; Godfrey, K.R. Industrial Process Identification; Grimble, M.J., Johnson, M.A., Eds.; Springer: London, UK, 2014; ISBN 978-1-4471-6346-6. [Google Scholar]
- Fielder, L.D. Pre- & post-emphasis techniques as applied to audio recording systems. In Proceedings of the Audio Engineering Society Preprint, Audio Engineering Soc, 78th AES Conventions, Anaheim, CA, USA, 3–6 May 1985. [Google Scholar]
- Hatziantoniou, P.D.; Mourjopoulos, J.N. Generalized fractional-octave smoothing of audio and acoustic responses. AES J. Audio Eng. Soc. 2000, 48, 259–280. [Google Scholar]
- Zhang, D. TI Application Note AN-1484: Designing A SEPIC Converter; Texas Instruments: Dallas, TX, USA, 2013. [Google Scholar]
- Granda, M.A.; Fernandez, C.; Barrado, A.; Zumel, P. DC/DC Converter Output Capacitor characterization using identification techniques and DTW. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition—APEC, New Orleans, LA, USA, 15–19 March 2020; Volume 2020, pp. 1195–1200. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Buck 1 | Buck 2 | Boost 1 |
|---|---|---|---|
| Inductance (µH) | 76 | 4.85 | 64.6 |
| Output capacitor (μF) | 99 | 84.73 | 95 |
| Load resistance (Ω) | 10 | 2.5 | 14.6 |
| Nominal duty cycle (%) | 50 | 50 | 50 |
| Input voltage (V) | 8 | 8 | 8 |
| Switching frequency (kHz) | 100 | 100 | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Granda, M.; Fernandez, C.; Barrado, A.; Zumel, P. Nonparametric Frequency Response Identification for Dc-Dc Converters Based on Spectral Analysis with Automatic Determination of the Perturbation Amplitude. Sensors 2021, 21, 3234. https://doi.org/10.3390/s21093234
Granda M, Fernandez C, Barrado A, Zumel P. Nonparametric Frequency Response Identification for Dc-Dc Converters Based on Spectral Analysis with Automatic Determination of the Perturbation Amplitude. Sensors. 2021; 21(9):3234. https://doi.org/10.3390/s21093234
Chicago/Turabian StyleGranda, Marlon, Cristina Fernandez, Andres Barrado, and Pablo Zumel. 2021. "Nonparametric Frequency Response Identification for Dc-Dc Converters Based on Spectral Analysis with Automatic Determination of the Perturbation Amplitude" Sensors 21, no. 9: 3234. https://doi.org/10.3390/s21093234