1. Introduction
Underwater transportation is an important requirement for the scientific, commercial and military sectors as it can place an underwater structure at a precise location [
1,
2,
3]. Unmanned Underwater Vehicles (UUVs) can be used in different systems to undertake underwater transportation based on the connection between the vehicles and the payload, i.e., Rigid Connection Transportation System (RCTS) and Flexible Connection Transportation System (FCTS). In RCTS, UUVs are connected to the payload via solid links as used in [
4,
5,
6,
7]. The whole system is considered to be a single body. Alternatively, in FCTS the vehicles are connected to the payload via flexible links, as adopted in [
8,
9,
10,
11,
12], where there is a relative motion between the vehicles and the payload. In this paper, hydrodynamic modelling is studied for an RCTS system operating underwater.
The development of the dynamic model for an underwater transportation system is vital to design stable, robust, high-accuracy and low-power-consumption control systems. The dynamic model consists of inertia, hydrostatic and hydrodynamic terms. The inertia and hydrostatic parameters can be directly measured with accuracy as they mainly depend on the physical system. The hydrodynamic parameters describe the opposition to the motion of the system due to the medium in which it is moving. Obtaining an accurately tuned dynamic model for an ROV and designing an appropriate control system are challenging due to the uncertainties in the hydrodynamic parameters [
13,
14]. The difficulty increases for complex systems comprising multiple vehicles. It is important that the hydrodynamic parameters for an underwater vehicle or an underwater system are determined accurately, which can be performed experimentally, numerically or semi-empirically.
A wide range of different experimental methods has been used to determine the hydrodynamic parameters of UUVs. For example, a planar motion mechanism (PMM) can be used to forcibly oscillate the vehicle whilst being towed through water in a towing tank; in [
15], PMM was employed to work out the hydrodynamic coefficient for an open-frame ROV called LAURS. An alternative approach, the free decay test, can also be used to work out the hydrodynamic coefficients [
16,
17]. This technique was first proposed by Morisons [
18] on ROV Hylas for determining the hydrodynamic coefficients in heave. In his procedure, the ROV was suspended in water and then released with the oscillations decaying over time. The hydrodynamic coefficients were calculated from the recorded location data history. Currently, the System Identification (SI) technique is widely used to determine the model parameters of UUVs from free water trials [
19,
20,
21]. Here, the data of onboard sensors and the control signals of thrusters are used to identify the parameters. This technique is relatively cheaper than using a PMM and repeatability is high [
15]. However, the accuracy of the parameters is affected due to sensor noise, which is caused by the magnetic field of the thruster motors, and due to difficulties in determining the thrusters’ actuation forces/moments exactly [
15].
Mesh-based CFD methods, e.g., Finite Volume Method (FVM), can account well for complex structures, such as UUVs. FVM allows for the precise representation of a complex geometry inside a computational domain, in which a 3D geometry may be expressed as a closed surface that is in contact with numerous computational cells, which fully accounts for its structural complexity and boundary effect. The fluid fields outside the geometry and inside the computational domain can be obtained through solving fully nonlinear Navier–Stokes equations [
22]. The accuracy of CFD has been reported to be very good for hydrodynamic problems where a solid body interacts with fluid flows [
23,
24,
25,
26,
27] with viscous and turbulent flows being well modelled [
28,
29,
30,
31,
32]; particular CFD studies on UUVs can be seen in [
33,
34,
35,
36,
37,
38,
39].
Although the CFD and experimental methods can provide accurate results, they are generally time-consuming and expensive. This is a problem especially for multi-vehicular transportation systems due to their complexity and reconfigurability to many different arrangements. Therefore, a semi-empirical approach is preferred for determining hydrodynamic parameters in many studies [
40,
41,
42,
43,
44]. Due to its rapidity and low cost, the estimated parameters using the semi-empirical method help in the optimal design of an underwater vehicle and to predict its behaviour [
45]. Moreover, the parameters could be used for the plant/controller optimisation for increased performance of an underwater vehicle before it is fabricated and tested [
46].
The semi-empirical approach of estimating the hydrodynamic coefficients for an underwater vehicle is mainly based on Morison’s equation [
47], which divides the parameters into non-viscous added mass and viscous damping terms. The added mass part is derived based on the potential flow theory and the drag part is obtained from the experimental analysis. Hence, the term “semi-empirical” stems from the added mass term coming from a fluid dynamics model, whereas the viscous drag term is from an empirical coefficient.
There are high uncertainties associated with the assumptions which are made in the semi-empirical method of calculating hydrodynamic coefficients. For instance, when Det Norske Veritas (DNV) standards [
48] are used to calculate the added mass of an ROV, as accomplished in [
40], it was assumed that the vehicle is a rectangular prism where two of the three sides are equal or the difference between two of the three sides is not more than ±10%. Moreover, the ROV was initially assumed to be a solid prism; therefore, the results needed adjusting to account for the gaps. Therefore, the results of the semi-empirical approach need to be verified and validated and necessary coefficients must be added to make the approach’s application feasible.
Hydrodynamic models have been developed for a single UUV based on a semi-empirical approach. Prestero [
41] developed a semi-empirical hydrodynamic model for a torpedo-shaped Autonomous Underwater Vehicle (AUV). The empirical formula was used to work out the drag term in the axial direction, whereas strip theory was used for the drag terms in other direction separately for the cylindrical hull and fins. The coefficients were used from the empirical data. The roll drag was estimated by considering only the fins, as the major portion of rolling resistance comes from fins. For the axial added mass term, the vehicle hull was approximated by an ellipsoid for which the major axis is half the vehicle length and the minor axis is half the vehicle diameter. The added mass terms in other directions were worked out using the strip theory separately for the cylindrical and cruciform hull cross-sections. The rolling added mass was calculated only for the fins as the smooth hull sections only generate a small added mass in roll which was neglected. The empirical formulas were used to work out the body and fin lift coefficients in all directions. Humphreys [
44] worked out the added mass terms in detail for each part of a torpedo-shaped AUV using the semi-empirical approach. In [
43], the lift, drag and pitching moment coefficients were calculated for a bare hull AUV using the semi-empirical equations which were derived in the literature, and CFD analysis was carried out to verify them. In [
42], analytical and semi-empirical (ASE) methods were used to approximate the hydrodynamic parameters for AUV. Eidsvik [
40] calculated the hydrodynamic parameters for a box-shaped Remotely Operated Vehicle (ROV) using the DNV-standard [
48], which is based on the Applied Fluid Dynamics book by Blevins [
49]. In his approach, the ROV was assumed to be a solid prism where two to three sides are equal. This assumption could be true for some specific ROVs such as SF-30k, AC-ROV 100, Seabotics LBV600-6 and Videoray PRO-4, where the height and width are approximately the same. Appropriate scaling coefficient was included to account for the penetrating flow through the ROV. The translational added mass terms were calculated using the potential flow data. However, the 3D data for the rotational added mass terms could not be found. Therefore, they were approximated by the 2D data and strip theory. The translational drag terms were calculated using the empirical. Again, the 3D data for the rotational drag parameters were not available. Therefore, they were approximated for small angles where rotational motion can be transformed to translational motion.
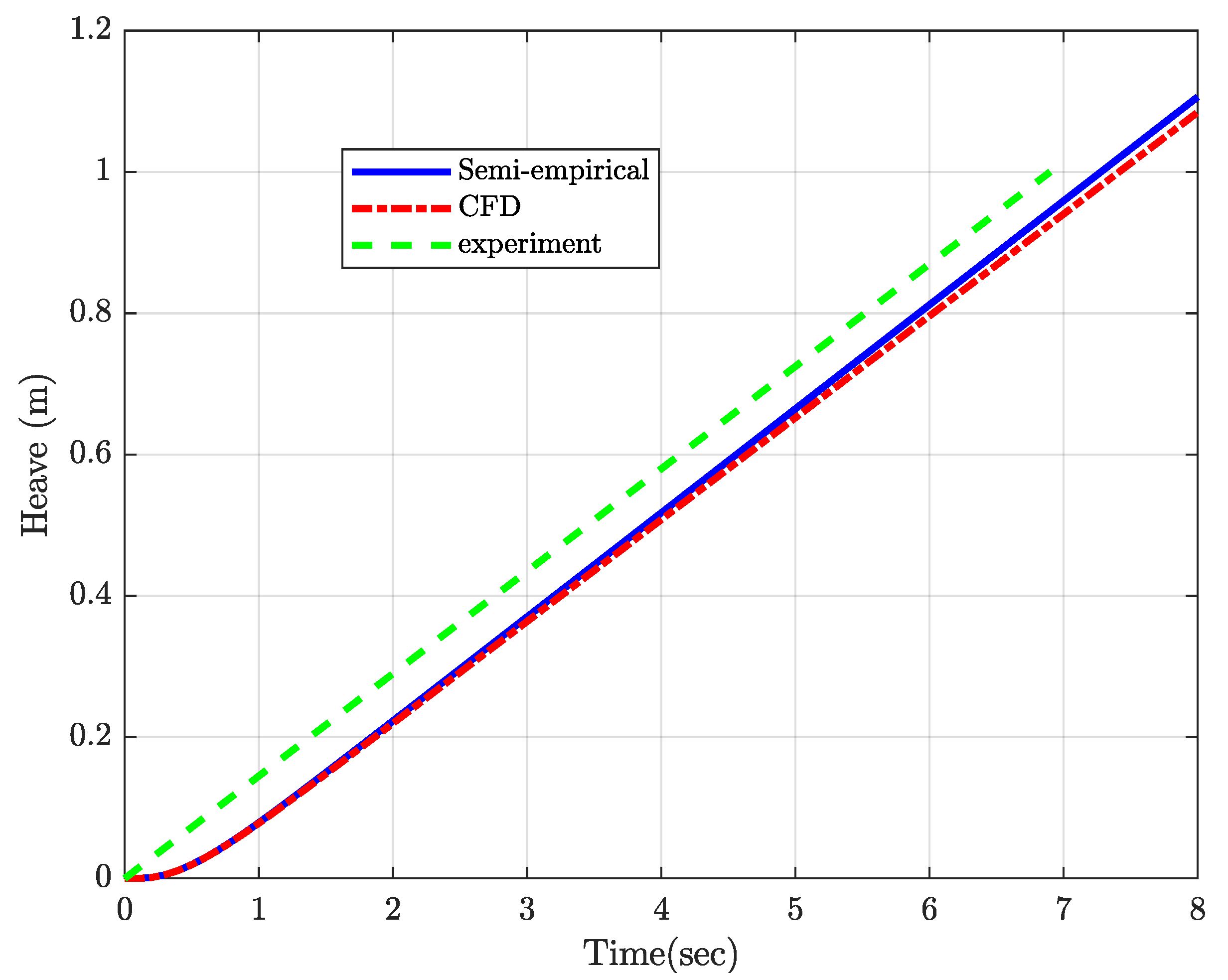
The calculation of hydrodynamic parameters for complex-shaped underwater vehicles or the underwater systems which consist of multiple UUVs is lacking in the literature. Therefore, hydrodynamic models are required to be developed for such systems. Moreover, the semi-empirical approach needs to be improved to reduce hydrodynamic uncertainties. The contribution of this work is twofold: (1) an effective semi-empirical approach is introduced to estimate the hydrodynamic coefficients for a system of multiple UUVs; (2) the method is verified against CFD results and validated with experimental measurements.
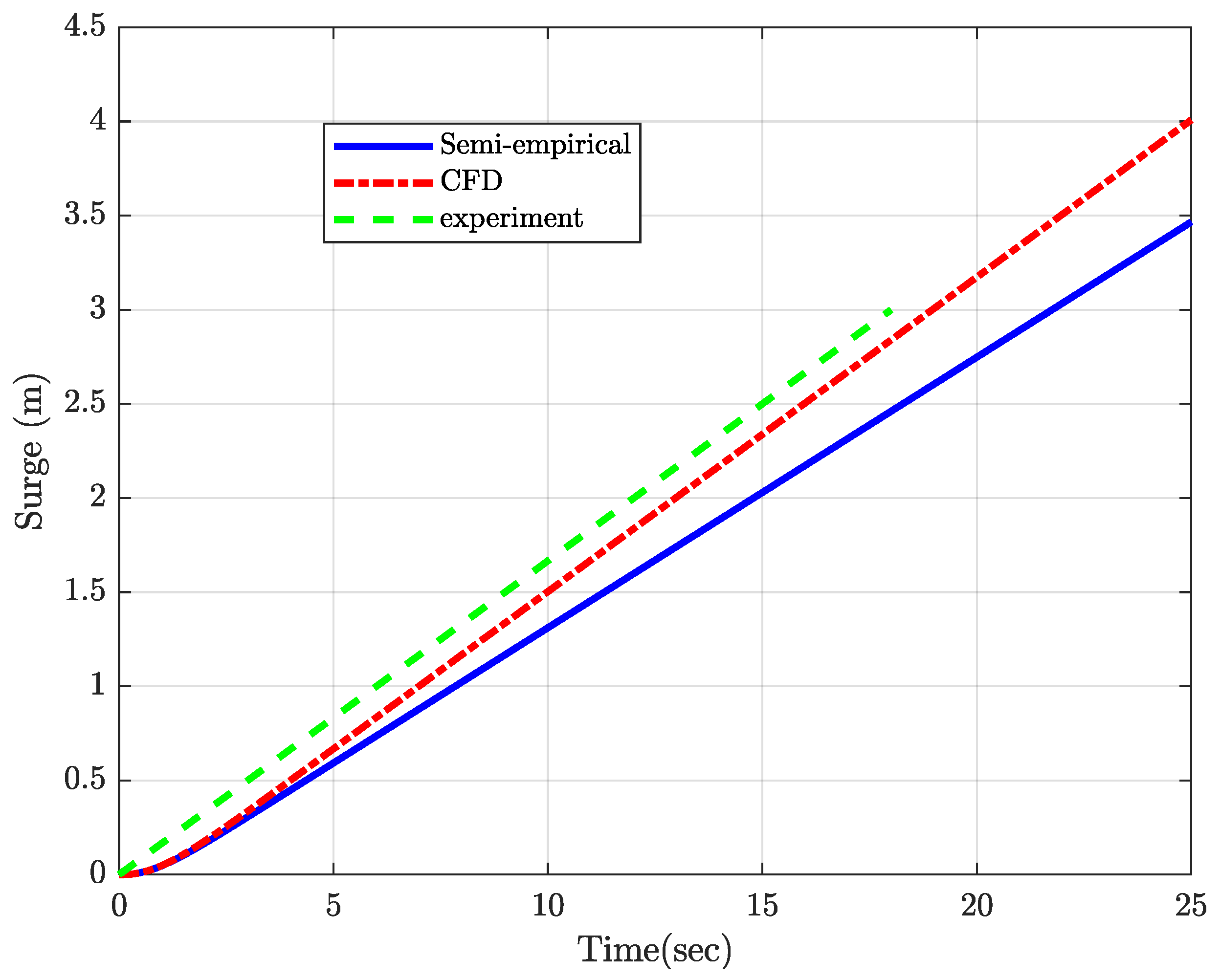
In this paper, the hydrodynamic parameters were not calculated in the experiments. Instead, the system was run in the towing tank and its motion response was recorded in the time domain. On the other hand, the dynamic model was developed for the system with the calculated hydrodynamic parameters from, respectively, the semi-empirical approach and CFD. The time-domain motion simulations were performed on the dynamic model. The motion response of the simulations was compared to the experiments for validation. A similar approach was used by Singh [
50] for an underwater glider in which the hydrodynamic parameters were calculated using CFD analysis. These coefficients were used in the motion equations proposed by Leonard and Graver [
51] in the vertical plane to obtain a simulation model. Subsequently, the motion response in simulations was compared to the experiments for validation.
The rest of the paper is arranged as follows.
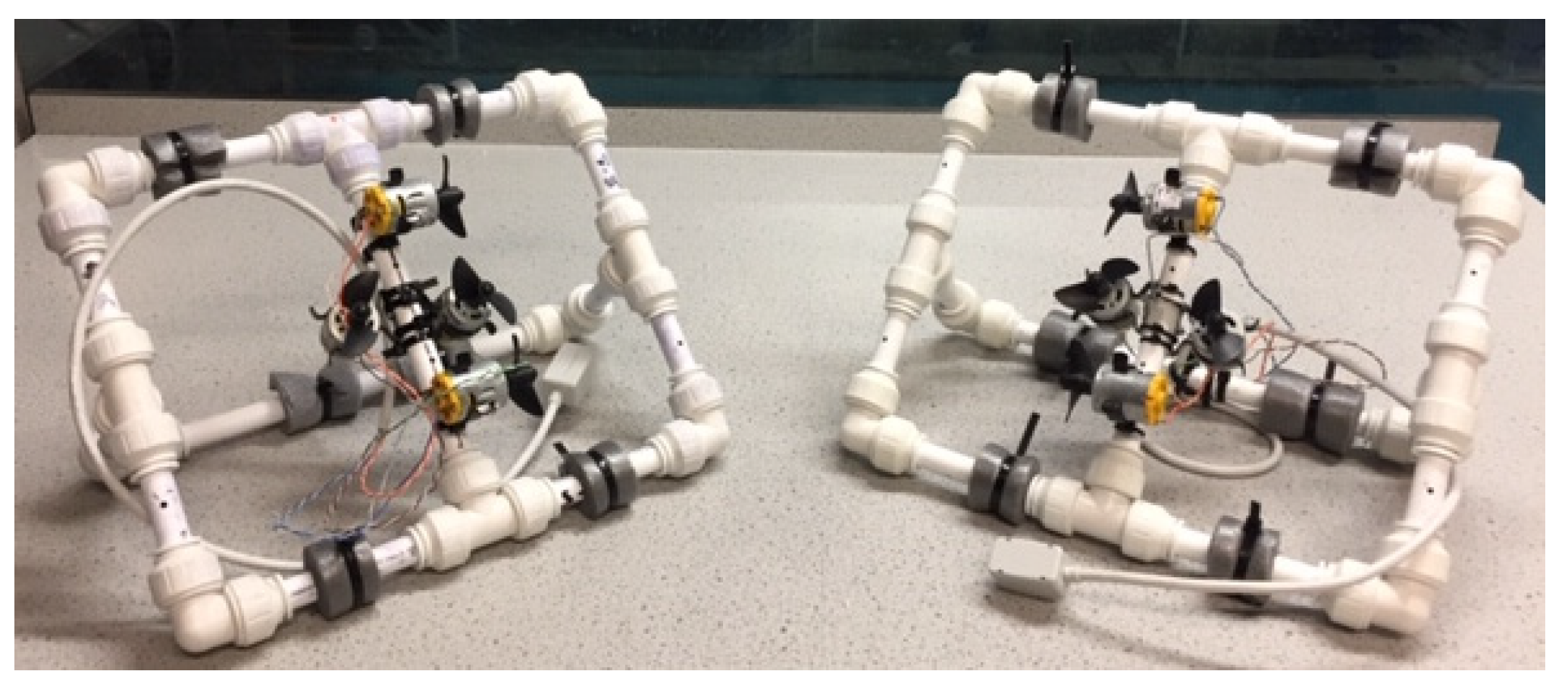
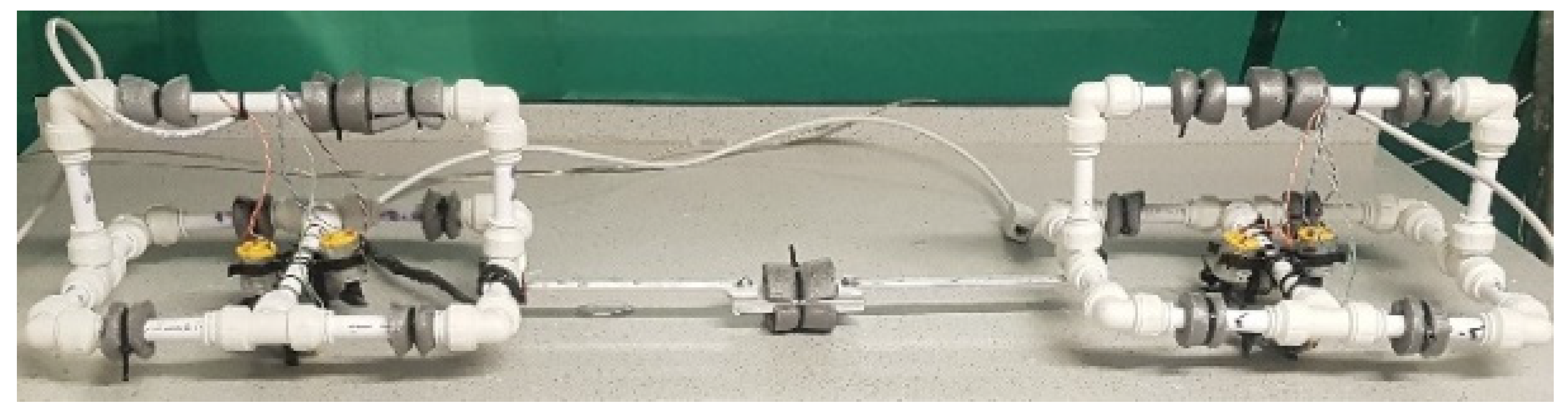
Section 2 describes the fabrication of the rigid connection transportation system (RCTS), which was tested in the towing tank and velocities were measured. This system, comprising two UUVs, represents the case study analysed in this work. In
Section 3, the hydrodynamic parameters are calculated using the semi-empirical approach and the drag forces are verified with CFD analysis. A dynamic model is also developed to run time-domain motion simulations. In
Section 4, the drag forces, which are obtained by semi-empirical and CFD methods, are compared and the difference is discussed to analyse the potential deficiency of the semi-empirical approach. The time-domain motion simulations are carried out with the coefficients computed with both methods, which are compared to the experiments for validation. Finally, concluding remarks are given in
Section 5.
3. Hydrodynamic Modelling
In this section, the hydrodynamic forces are calculated for the fabricated RCTS using the semi-empirical approach, with each piece of the Seaperch UUV, manipulator and payload being analysed separately and then summed together. Additionally, in this section, a CFD model was built and used to obtain the drag forces.
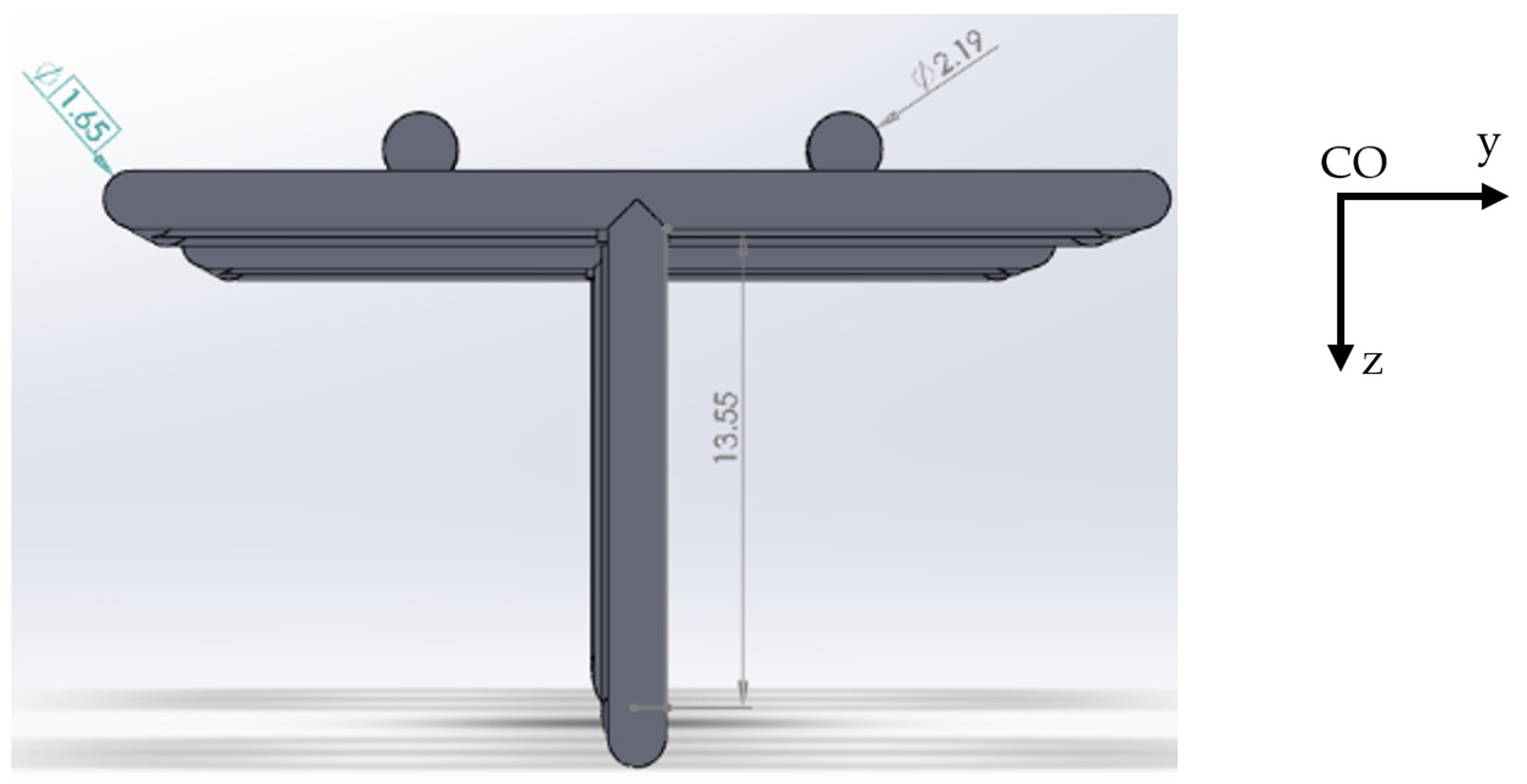
3.1. Geometry
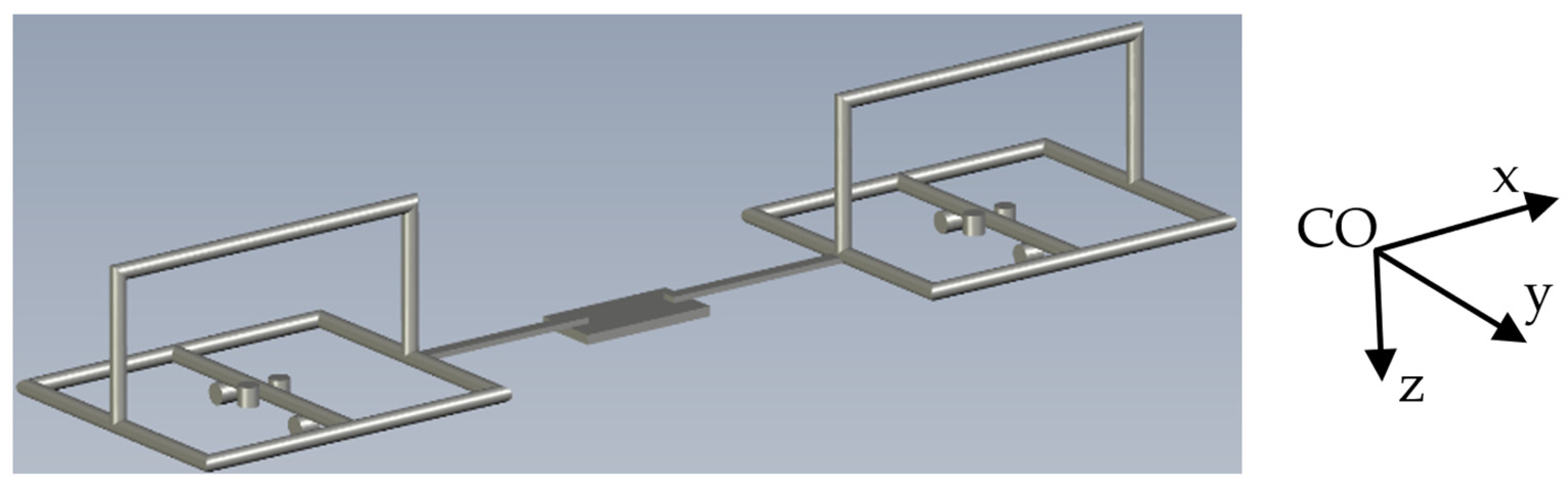
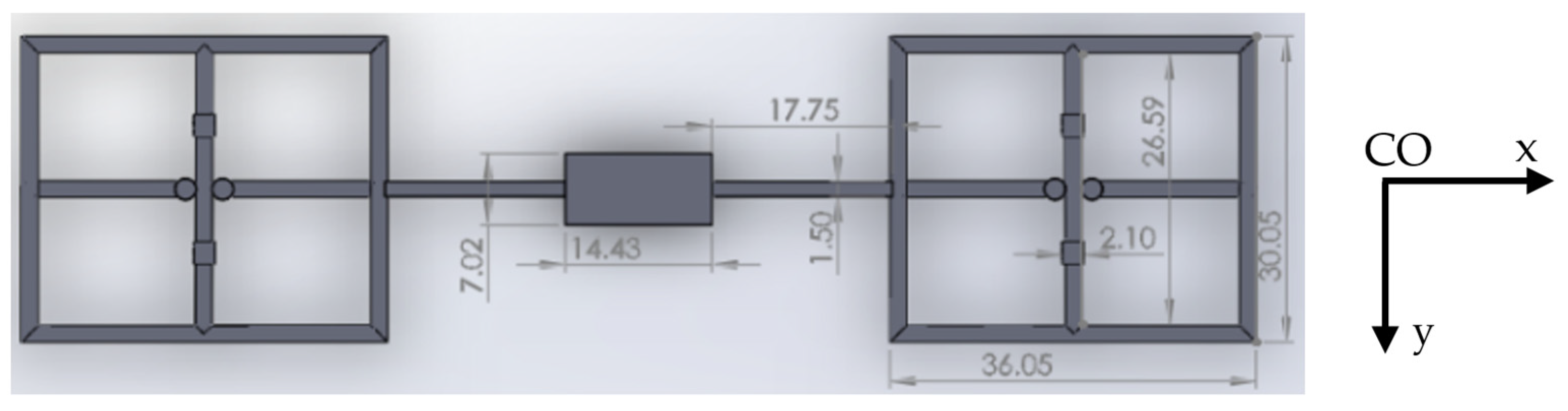
A 3D model of the system was produced in the SolidWorks software [
60], as shown in
Figure 3. The plan, profile and front views are shown in
Figure 4,
Figure 5 and
Figure 6, respectively.
3.2. Assumptions
The following assumptions were made when calculating the hydrodynamic parameters for the studied system using the semi-empirical and CFD methods:
The system is a rigid body, i.e., there is no relative motion between the mass particles of the system. This is generally true as the parts on the system were not found to bend during testing.
The system’s mass and its distribution do not change during the motion. This is a valid assumption and ensured during testing.
The system is operating below base wave depth, i.e., the depth at which the sea wave effects are negligible. The baseline depth is equal to
where
is equal to the wavelength [
61]. This was ensured in the experiments.
The system only has translational motion, i.e., in surge, sway and heave. This was ensured during experiments as only the respective thrusters were used for motion in each direction and no disturbances were included.
The vehicle does not experience a memory effect, i.e., the vehicle does not pass through its own wake.
The vehicle does not experience the ocean current. The calm water in the towing tank would have negligible water currents.
Interaction with the seabed or other underwater bodies is neglected. This was ensured during the experiments.
The flow interaction amongst the parts of the system is ignored in the semi-empirical approach. This is something of concern and could be the main reason to cause an error. This effect is accounted for in CFD.
The blades of the thrusters are ignored. They are small in size; therefore, their effect on the overall hydrodynamic results is small.
The elbows and T-joints are considered to have pipes of the same inner and outer diameters as of the other pipes, and the length is the same as of the respective elbow or T-joint. This would have a small impact as the extended portion of elbows and T-joint is only 6.5 mm.
The impact of buoyancy sheet patches on the hydrodynamic parameters is also ignored.
Although the system is underactuated and cannot move in pure sway, the added mass and drag forces were calculated in all three translational directions, i.e., surge, sway and heave. The velocity in sway is assumed to be the same as in surge.
3.3. Semi-Empirical Approach
The semi-empirical methods which are mostly applied in the literature to calculate the hydrodynamic parameters for a single UUV consider the whole vehicle, either a cylinder with fins or a solid prism. However, they are only true for specific types and shapes of UUVs. For the complex shaped UUV or a system of multiple UUVs, there is a lack of research in the literature to work out the hydrodynamic parameters. Therefore, in this study, a different approach of estimating the hydrodynamic parameters for an underwater vehicle is proposed, in which the system is cut down to simple individual parts. The parameters are calculated for each part and combined to obtain the net effect.
The hydrodynamic parameters were calculated for one Seaperch UUV and one manipulator plate, which were then doubled to obtain the effect of two Seaperch UUVs and two manipulators. The payload plate was evaluated separately. For the Seaperch UUV, the hydrodynamic parameters were evaluated separately for each pipe and thruster motor. They were then summed to obtain the net effect in each direction. The system parts are shown in
Table 4.
3.3.1. Added Mass
The added mass is the inertia added to the vehicle as it displaces the surrounding water during acceleration or deceleration. The calculation of added mass does not take into account the viscous effects. The added mass part of Morison’s equation for a solid body is given as [
47]:
where
is the added mass term due to acceleration
or, in other words, the derivative of the added mass w.r.t acceleration
. For instance, the added mass terms in surge, sway and heave are
,
and
, respectively.
is the density of water (in this case, freshwater),
is the added mass coefficient and
is the reference volume.
The added mass terms were calculated separately for each pipe and thruster motor of the Seaperch UUV and for the manipulator and payload plates using the data which are based on the DNV standards [
48]. The detailed calculations are shown in
Appendix A. After calculations, the added mass terms for each part of the system are shown in
Table 5. They were summed together to obtain the total added mass terms in each surge, sway and heave, as shown in
Table 6. The impact of added mass on the overall motion response would be less significant due to the short acceleration duration.
The added mass terms are added to the total mass of the system to obtain the net inertia terms, which are then multiplied by the accelerations to obtain the inertial forces.
3.3.2. Drag
The resistance to the motion of the vehicle due to the viscosity of water is called drag. The drag part of Morison’s equation for a solid body is given as [
47]:
where
is the drag term due to velocity
. For instance, the drag terms in surge, sway and heave are
,
and
, respectively.
is the drag coefficient where
or
depends on the form or frictional drag, which further depends on the shape of the part in front of the flow and the flow velocity. The drag coefficients were also calculated from the data based on DNV standards given in [
48].
is the cross-sectional or surface area depending on the form or frictional drag.
Initially, it is important to know whether the flow over a body predominantly exerts form or frictional drag.
Similar to the added mass, the drag terms were calculated separately for each part of the Seaperch UUVs, manipulators and payload. Initially, it was worked by Reynold’s number (Re) whether the flow over a part body predominantly exerts form or frictional drag.
The detailed calculations are shown in
Appendix B. The total drag terms for the system in surge, sway and heave are shown in
Table 7.
The drag forces in surge, sway and heave were obtained by multiplying the drag terms by the square of the velocities in each direction.
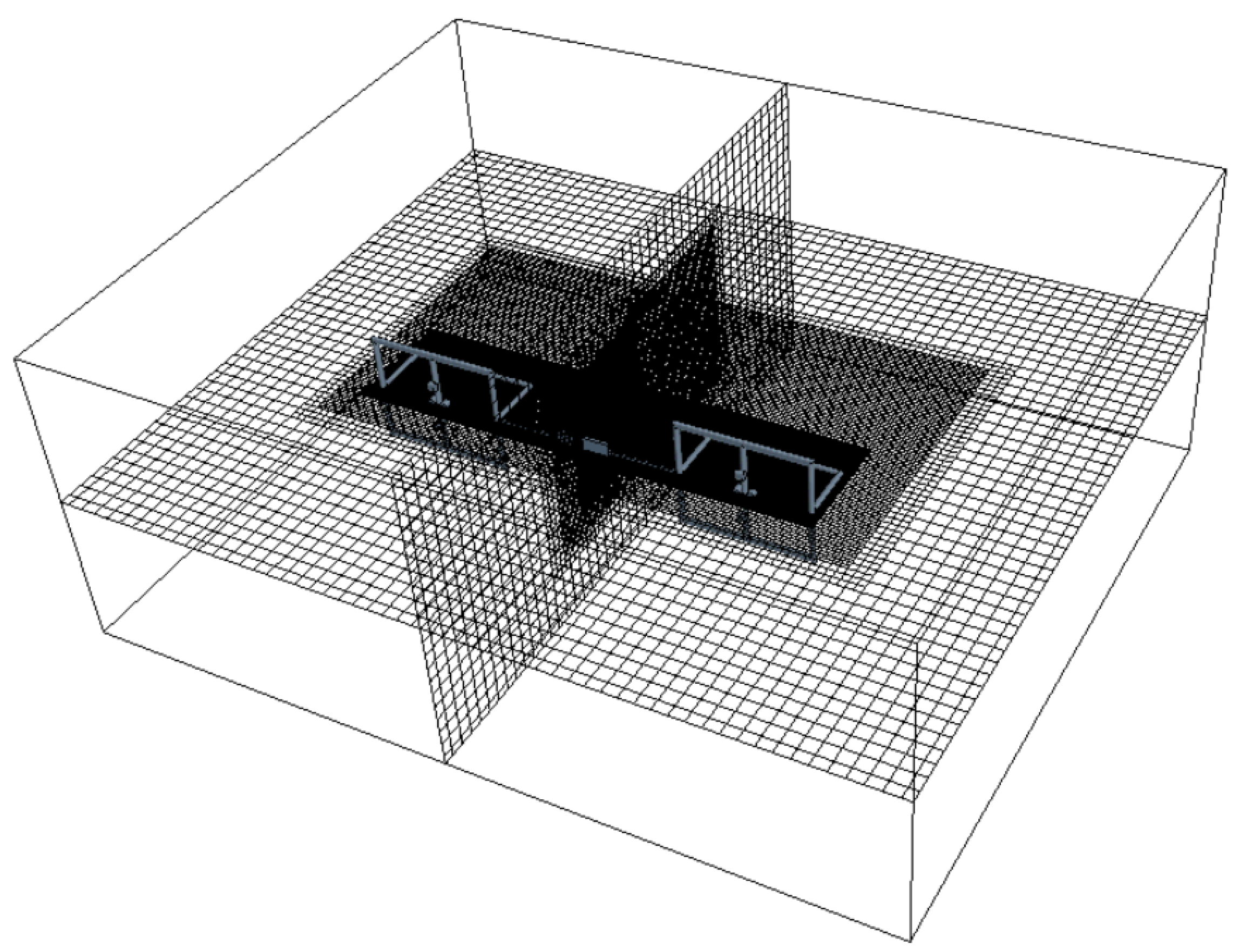
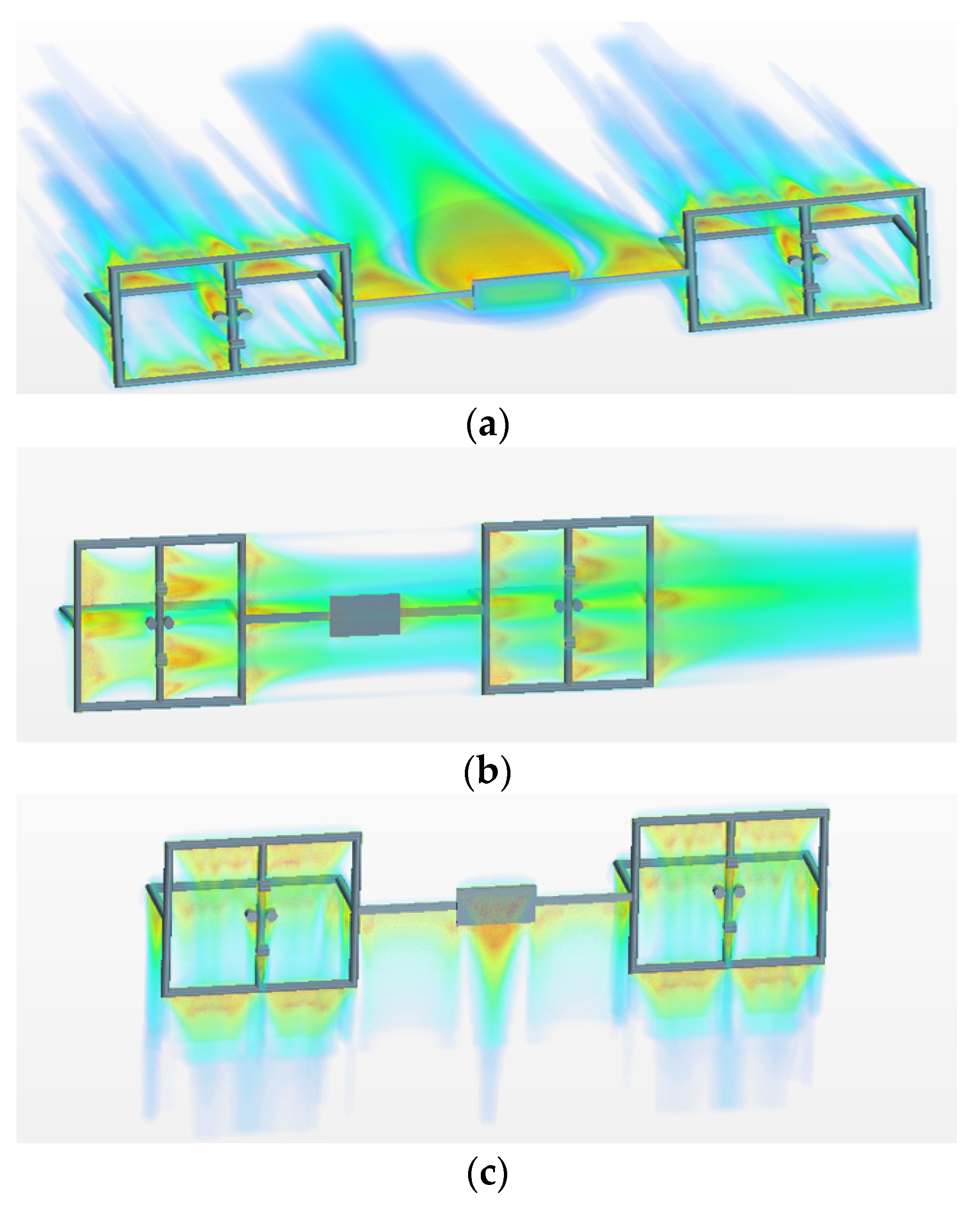
3.4. CFD Analysis
The computational domain was built for the studied transportation system introduced in
Section 2, using the STAR-CCM+ CFD software [
62]. A three-dimensional cuboid computational domain was established, and the transportation system is fixed in the middle of the domain, as shown in
Figure 7. The domain size is sufficiently large to avoid the system feeling any boundaries, in line with the experiments. The boundary conditions consist of a velocity inlet and a pressure outlet to propagate a constant flow against the device. The other four boundaries were defined as zero-gradient to model far fields. The domain is filled with water, and the water was defined as flowing with a constant velocity (U
water) against the system. Thus, a relative velocity exists between the system and water, where U
water indicates the advancing speed of the system in calm water (U
water = U), which is known in surge, sway and heave. This approach is similar to previous work studying the hydrodynamic performance of objects in water [
63,
64]. The direction of the water flow is set according to different motions of the system, as shown in
Figure 8, in which the corresponding velocity fields at steady state are presented.
The solution of the fluid domain was obtained by solving the Reynolds-averaged Navier–Stokes (RANS) equations for an incompressible Newtonian fluid:
where
is the time-averaged velocity,
is the velocity fluctuation,
ρ is the fluid density,
denotes the time-averaged pressure,
=
µ [∇
v+ (∇
v)
T] is the viscous stress term, µ is the dynamic viscosity and
g is gravitational acceleration set at 9.81 m/s
2. The density of the water was set at 1000 kg/m
3 and the dynamic viscosity was 8.90 × 10
−4 N·s/m
2. Since the RANS equations have been adopted to account for the turbulent effects, a turbulence model needs to be applied; here, the Shear Stress Transport (SST) k − ω model was adopted to close the equations.
The drag force is the steady-state force from fluid on the transportation system against the motion. This can be calculated as the integration of pressure and viscous forces on the system’s surface depending on the direction of motion.
The mesh was refined around the device and for the nearby flow field. Following the ITTC guideline [
65], the mesh was globally scaled by a factor of
, which resulted in three mesh sets of, respectively, 1.56, 2.2 and 3.1 million cells. The corresponding drag forces in heave are 0.75, 0.80 and 0.80 N, which means the drag achieved convergence at 2.2 million cells, and further increasing the cells to 3.1 million could not alter the results. Therefore, the mesh set with 2.2 million cells was applied for further studies to save computational costs. The time step size was set based on the Courant number equalling to one. The applied CFD is a standard method and the numerical setup follows mature guidelines of the field [
65], which has been extensively validated to be highly accurate, while this specific CFD model will be further validated by an experimental model introduced later.
3.5. Dynamic Modelling
The dynamic model is developed for the transportation system to run the time-domain motion simulations. Fossen’s approach [
66] is used in the development of the dynamic model in which the position and orientation of the system are defined in the earth-fixed frame (EFF), whereas velocities, forces and moments are defined in the body-fixed frame (BFF). Though the power cables were made neutrally buoyant, their inertia would have an impact on the overall inertia of the system. However, the inertia of the power cables was ignored in the system’s dynamic model due to the difficulty of taking their effect on the centre of origin of the system (CO). Moreover, assumptions 1 to 7 in
Section 3.2 were also made in the development of the dynamic model for the studied transportation system.
The kinematics provides the change in the position and orientation of the system, which is written in the vectorial form as:
where
is the transformation matrix to convert velocity vector
in the earth-fixed frame (EFF), which is equated to the change in position and orientation vector
.
The kinetics provides the change in the velocity terms, which can be written in the vectorial form as [
2]:
where:
—Mass matrix (rigid body + added mass matrices).
—Coriolis and centripetal matrix (rigid body + added mass Coriolis and centripetal matrices).
—Damping matrix.
—Vector of hydrostatic forces and moments.
Only the translational motions are investigated for the system in this study. The same is also ensured during the experiments. Therefore, the rigid body mass matrix
consists of only the mass terms, given as:
The mass of the system
) was measured, as shown in
Table 2. The added mass matrix is shown in Equation (8). The added mass terms which were used in the time-domain motion simulations for both the semi-empirical and drag methods were the ones calculated by the semi-empirical method. They were ignored in the calculations using the CFD method and would have less impact as the acceleration lasts a short time.
The damping matrix contains the terms which were calculated either by the semi-empirical or CFD method. The separate motion simulations would take place with the damping results of semi-empirical and CFD methods. The damping matrix is written as:
The Coriolis and centripetal terms are due to the rotation of the body-fixed frame (BFF) about the earth-fixed frame (EFF). Due to the consideration of no rotational motion, and become zero.
is the vector of hydrostatic forces and moments, which is obtained by the difference between weight and buoyancy. This is given as:
is the vector of thrust forces and moments of the system.
The thrust vector of each thruster
can be calculated from [
66]:
where
,
and
are the thrust forces applied in surge, sway and heave by each thruster,
is the position of each thruster w.r.t the centre of the combined body (CO), which is taken at the centre of the payload.
Due to the consideration of only the translational force effects,
for each thruster is written as:
The combined thrust vector
can be written as the product of the thrust allocation matrix
and the vector of thrust forces of the thrusters
, given as:
The thrust allocation matrices for the two Seaperch UUVs in the system are shown as:
All these matrices were incorporated in MATLAB [
67] and the 4th order Runge–Kutta method was applied to simulate the motion response of the system over time.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















