
Surface Characterisation of Kolk-Boils within Tidal Stream Environments Using UAV Imagery

 ,
,  , ,
, ,
Abstract
:1. Introduction

2. Materials and Methods
2.1. Study Site
2.2. Data Collection
2.3. Data Processing
2.4. Post-Processing
2.5. Data Analysis
3. Results
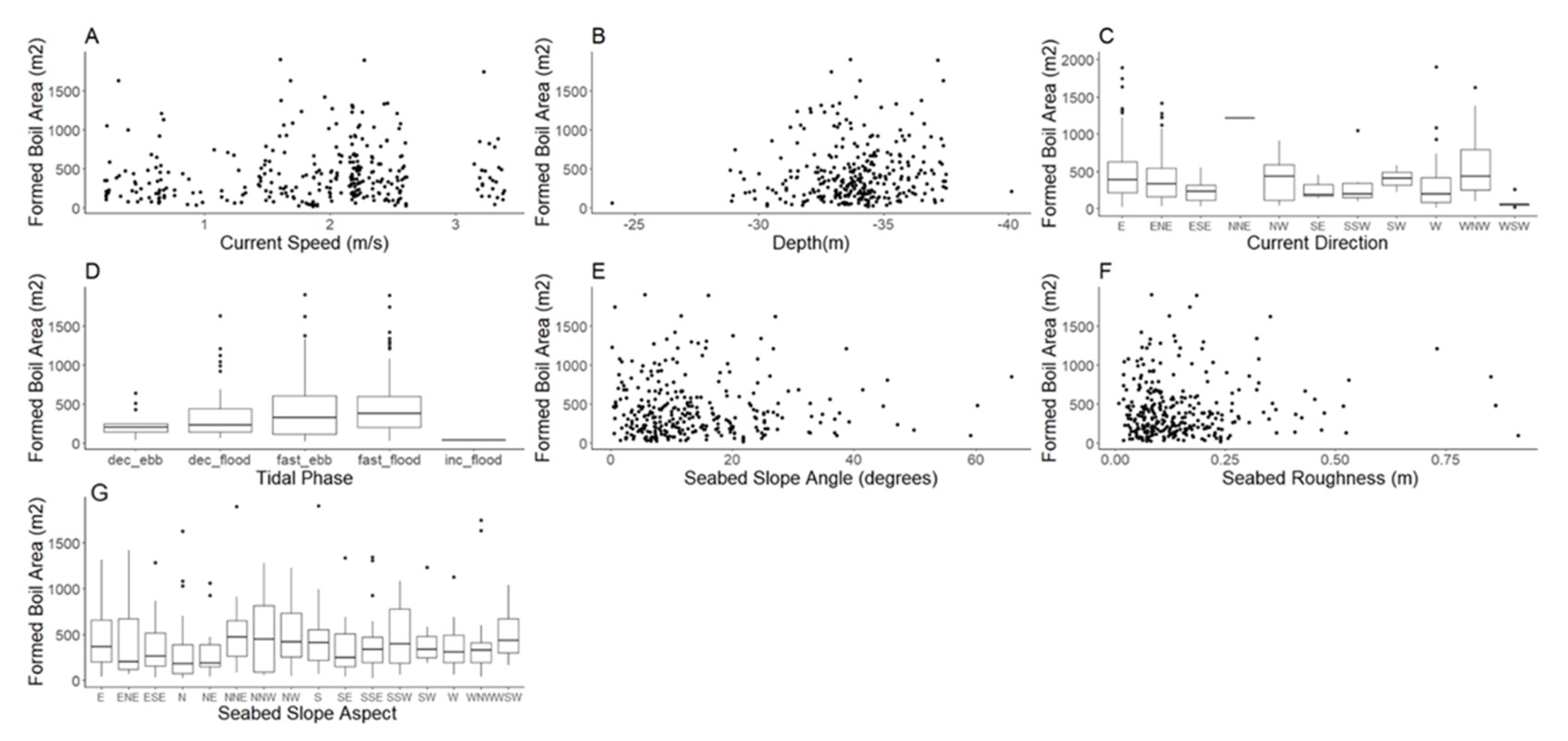
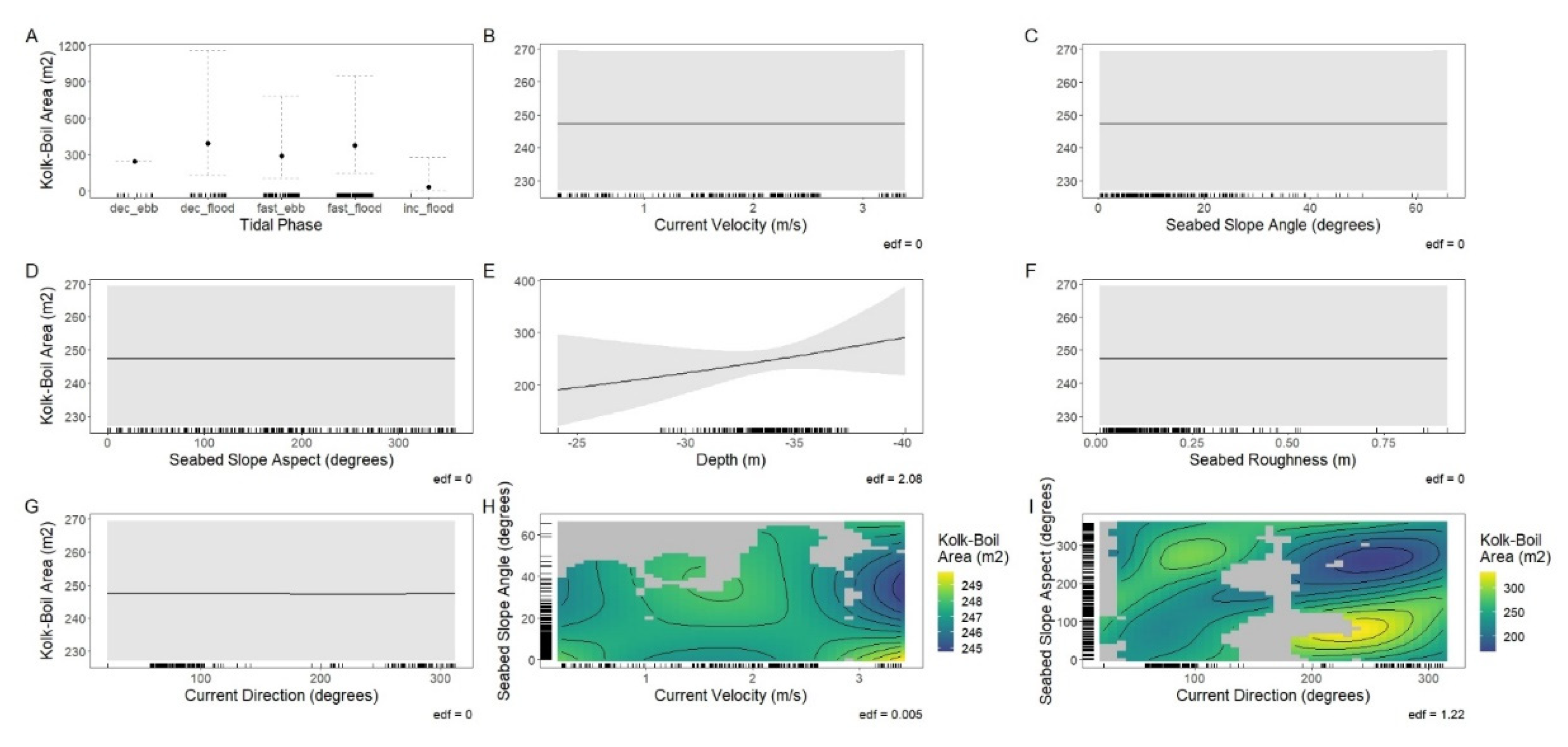
3.1. Kolk-Boil Distribution
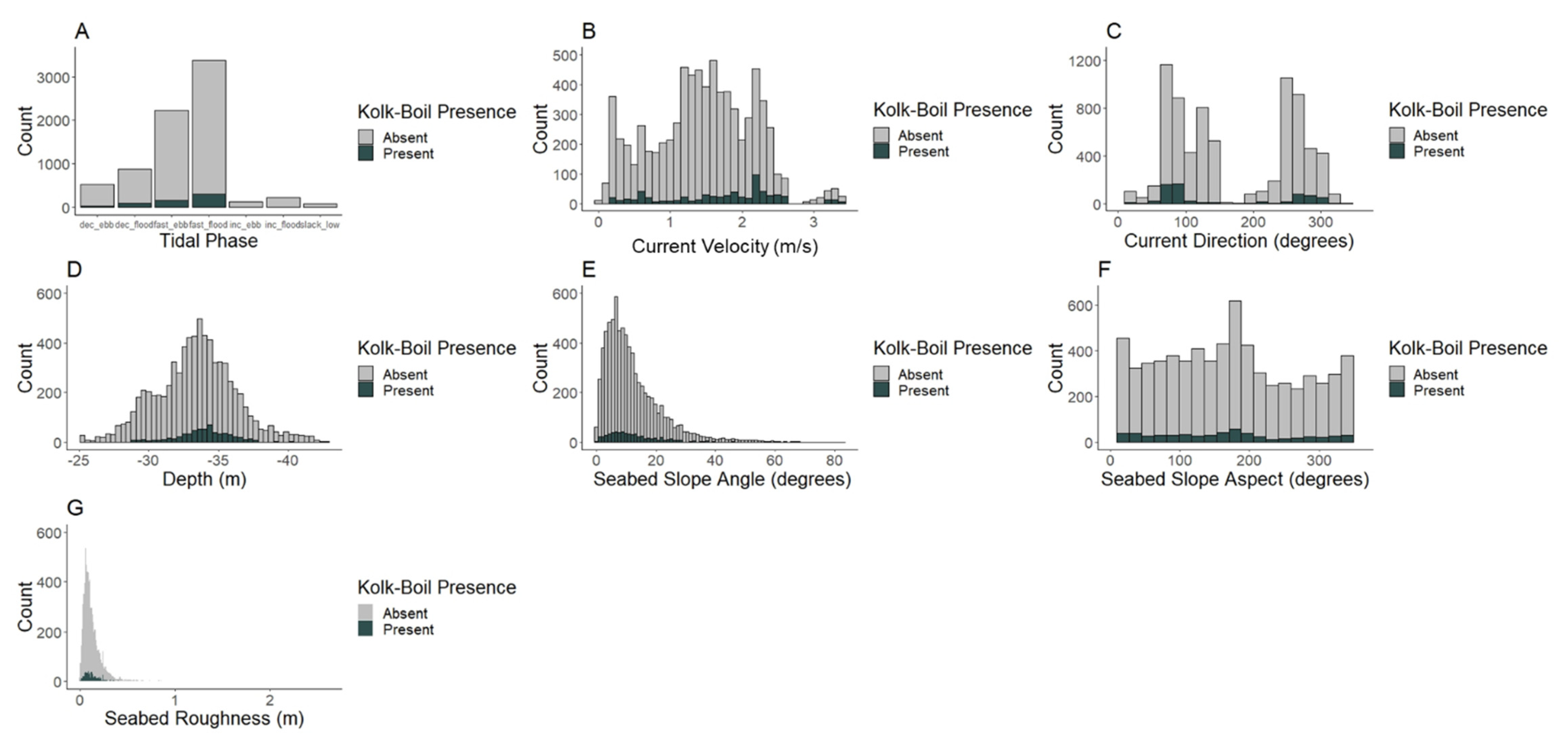
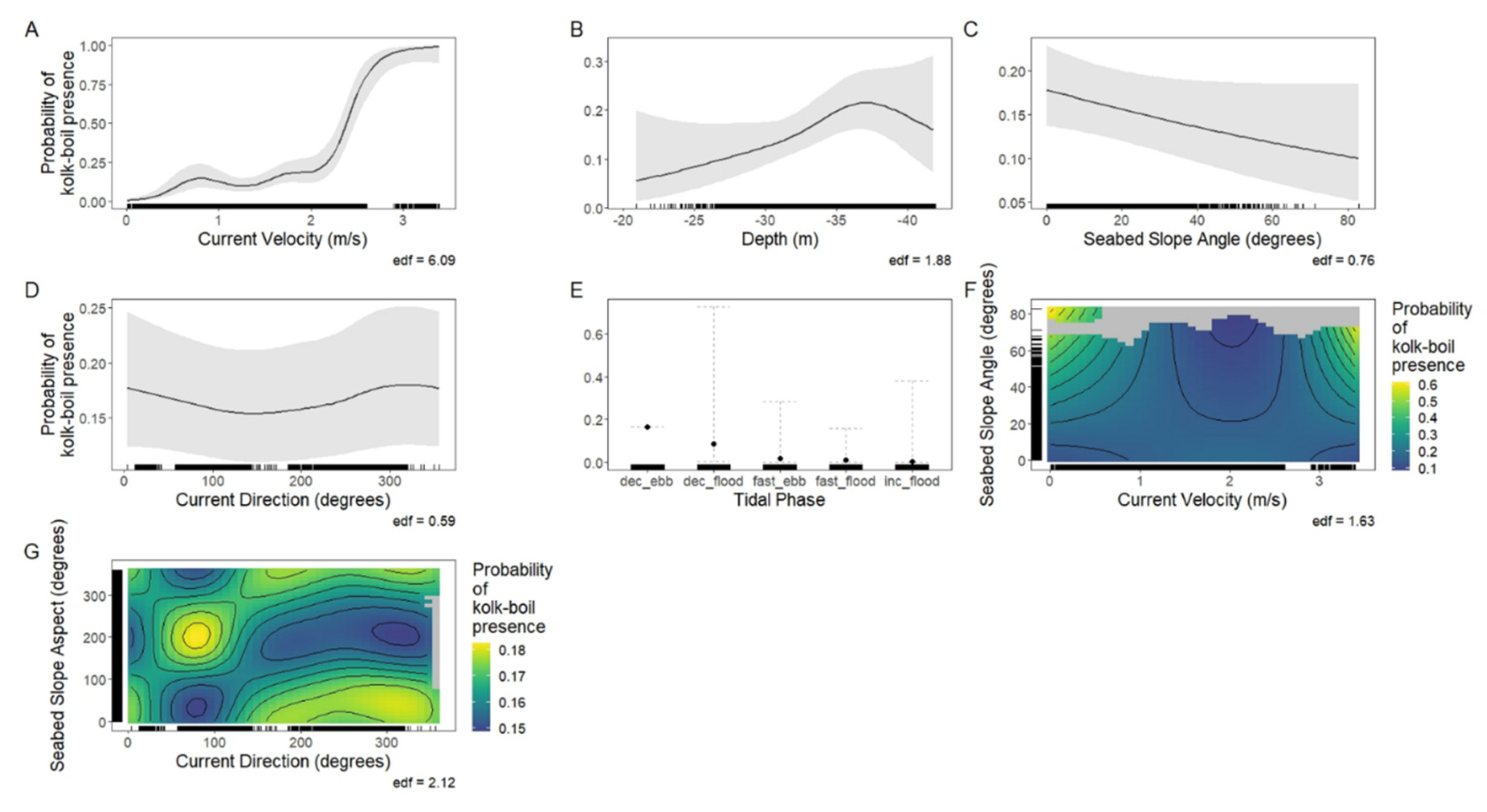
3.2. Kolk-Boil Presence
4. Discussion
4.1. Kolk-Boil Characterisation
4.1.1. Distribution
4.1.2. Presence
4.2. Implications for Tidal Energy Developments
4.3. Future Work
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A








References
- Committee on Climate Change Net Zero: The UK’s Contribution to Stopping Global Warming. Available online: https://www.theccc.org.uk/publication/net-zero-the-uks-contribution-to-stopping-global-warming/ (accessed on 18 August 2020).
- Roche, R.C.; Walker-Springett, K.; Robins, P.E.; Jones, J.; Veneruso, G.; Whitton, T.A.; Piano, M.; Ward, S.L.; Duce, C.E.; Waggitt, J.J.; et al. Research priorities for assessing potential impacts of emerging marine renewable energy technologies: Insights from developments in Wales (UK). Renew. Energy 2016, 99, 1327–1341. [Google Scholar] [CrossRef] [Green Version]
- Pye, S.; Li, F.G.N.; Price, J.; Fais, B. Achieving net-zero emissions through the reframing of UK national targets in the post-Paris Agreement era. Nat. Energy 2017, 2, 1–7. [Google Scholar] [CrossRef]
- Wang, Z.; Carriveau, R.; Ting, D.S.K.; Xiong, W.; Wang, Z. A review of marine renewable energy storage. Int. J. Energy Res. 2019, 43, 6108–6150. [Google Scholar] [CrossRef]
- González-Gorbeña, E.; Rosman, P.C.C.; Qassim, R.Y. Assessment of the tidal current energy resource in São Marcos Bay, Brazil. J. Ocean Eng. Mar. Energy 2015, 1, 421–433. [Google Scholar] [CrossRef]
- Nachtane, M.; Tarfaoui, M.; Goda, I.; Rouway, M. A review on the technologies, design considerations and numerical models of tidal current turbines. Renew. Energy 2020, 157, 1274–1288. [Google Scholar] [CrossRef]
- Benjamins, S.; Van Geel, N.; Hastie, G.; Elliott, J.; Wilson, B. Harbour porpoise distribution can vary at small spatiotemporal scales in energetic habitats. Deep. Sea Res. Part II Top. Stud. Oceanogr. 2017, 141, 191–202. [Google Scholar] [CrossRef] [Green Version]
- Benjamins, S.; Dale, A.; Hastie, G.; Waggitt, J.J.; Lea, M.-A.; Scott, B.; Wilson, B. Confusion Reigns? A Review of Marine Megafauna Interactions with Tidal-Stream Environments. Oceanogr. Mar. Biol. Annu. Rev. 2015, 53, 1–54. [Google Scholar] [CrossRef]
- Thiébaut, M.; Filipot, J.-F.; Maisondieu, C.; Damblans, G.; Duarte, R.; Droniou, E.; Chaplain, N.; Guillou, S. A comprehensive assessment of turbulence at a tidal-stream energy site influenced by wind-generated ocean waves. Energy 2020, 191, 116550. [Google Scholar] [CrossRef]
- Ikhennicheu, M.; Germain, G.; Druault, P.; Gaurier, B. Experimental study of coherent flow structures past a wall-mounted square cylinder. Ocean Eng. 2019, 182, 137–146. [Google Scholar] [CrossRef]
- Sentchev, A.; Thiébaut, M.; Schmitt, F.G. Impact of turbulence on power production by a free-stream tidal turbine in real sea conditions. Renew. Energy 2020, 147, 1932–1940. [Google Scholar] [CrossRef]
- Whitton, T.A.; Jackson, S.E.; Hiddink, J.G.; Scoulding, B.; Bowers, D.; Powell, B.; D’Urban Jackson, T.; Gimenez, L.; Davies, A.G. Vertical migrations of fish schools determine overlap with a mobile tidal stream marine renewable energy device. J. Appl. Ecol. 2020, 57, 729–741. [Google Scholar] [CrossRef]
- Williamson, B.; Fraser, S.; Williamson, L.; Nikora, V.; Scott, B. Predictable changes in fish school characteristics due to a tidal turbine support structure. Renew. Energy 2019, 141, 1092–1102. [Google Scholar] [CrossRef]
- Dufaur, J. Characteristics of the turbulent flow in the Inner Sound, tidal development site in the Pentland Firth, Scotland. Master’s Thesis, University of Aberdeen, Aberdeen, Scotland, 2016. [Google Scholar]
- Matthes, G.H. Macroturbulence in natural stream flow. Trans. Am. Geophys. Union 1947, 28, 255–265. [Google Scholar] [CrossRef]
- Ikhennicheu, M.; Druault, P.; Gaurier, B.; Germain, G. An experimental study of bathymetry influence on turbulence at a tidal stream site. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Müller, A.; Gyr, A. On the vortex formation in the mixing layer behind dunes. J. Hydraul. Res. 1986, 24, 359–375. [Google Scholar] [CrossRef]
- Thorpe, S.A.; Green, J.A.M.; Simpson, J.H.; Osborn, T.R.; Nimmo Smith, W.A.M. Boils and Turbulence in a Weakly Stratified Shallow Tidal Sea. J. Phys. Oceanogr. 2008, 38, 1711–1730. [Google Scholar] [CrossRef]
- Best, J.L. Kinematics, Topology and Significance of Dune-Related Macroturbulence: Some Observations from the Laboratory and Field. Fluv. Sedimentol. VII 2009, 35, 41–60. [Google Scholar] [CrossRef]
- Best, J. The fluid dynamics of river dunes: A review and some future research directions. J. Geophys. Res. Earth Surf. 2005, 110, 1–21. [Google Scholar] [CrossRef]
- Sellar, B.; Harding, S.; Richmond, M. High-resolution velocimetry in energetic tidal currents using a convergent-beam acoustic Doppler profiler. Meas. Sci. Technol. 2015, 26, 085801. [Google Scholar] [CrossRef]
- Nimmo Smith, W.A.M.; Thorpe, S.A.; Graham, A. Surface effects of bottom-generated turbulence in a shallow tidal sea. Nature 1999, 400, 251–254. [Google Scholar] [CrossRef]
- Kregting, L.; Elsaesser, B.; Kennedy, R.; Smyth, D.; O’Carroll, J.; Savidge, G. Do Changes in Current Flow as a Result of Arrays of Tidal Turbines Have an Effect on Benthic Communities? PLoS ONE 2016, 11, e0161279. [Google Scholar] [CrossRef] [Green Version]
- Marmorino, G.O.; Smith, G.B.; Miller, W.D. Turbulence characteristics inferred from time-lagged satellite imagery of surface algae in a shallow tidal sea. Cont. Shelf Res. 2017, 148, 178–184. [Google Scholar] [CrossRef]
- Chickadel, C.C.; Horner-Devine, A.R.; Talke, S.A.; Jessup, A.T. Vertical boil propagation from a submerged estuarine sill. Geophys. Res. Lett. 2009, 36, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Easton, M.C.; Woolf, D.K.; Bowyer, P.A. The dynamics of an energetic tidal channel, the Pentland Firth, Scotland. Cont. Shelf Res. 2012, 48, 50–60. [Google Scholar] [CrossRef]
- Waldman, S.; Bastón, S.; Nemalidinne, R.; Chatzirodou, A.; Venugopal, V.; Side, J. Implementation of tidal turbines in MIKE 3 and Delft3D models of Pentland Firth & Orkney Waters. Ocean Coast. Manag. 2017, 147, 21–36. [Google Scholar] [CrossRef] [Green Version]
- Neill, S.P.; Vögler, A.; Goward-Brown, A.J.; Baston, S.; Lewis, M.J.; Gillibrand, P.A.; Waldman, S.; Woolf, D.K. The wave and tidal resource of Scotland. Renew. Energy 2017, 114, 3–17. [Google Scholar] [CrossRef]
- Wang, T.; Adcock, T.A. Power and thrust capping of tidal stream turbines—A case study of the pentland firth. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering—OMAE; American Society of Mechanical Engineers: New York, NY, USA, 2018; Volume 10. [Google Scholar]
- Goddijn-Murphy, L.; Woolf, D.K.; Easton, M.C. Current Patterns in the Inner Sound (Pentland Firth) from Underway ADCP Data. J. Atmos. Ocean. Technol. 2013, 30, 96–111. [Google Scholar] [CrossRef]
- Rajgor, G. Tidal developments power forward. Renew. Energy Focus 2016, 17, 147–149. [Google Scholar] [CrossRef]
- Policy and Innovation Group UK Ocean Energy Review 2019. Available online: http://www.policyandinnovationedinburgh.org/uploads/3/1/4/1/31417803/policy_and_innovation_group_uk_oceanenergy_review_2019._final.pdf (accessed on 18 August 2020).
- SIMEC MeyGen|Tidal Projects|SIMEC Atlantis Energy. Available online: https://simecatlantis.com/projects/meygen/ (accessed on 17 July 2020).
- Griffiths, T.; Draper, S.; Cheng, L.; Tong, F.; Fogliani, A.; White, D.; Johnson, F.; Coles, D.; Ingham, S.; Lourie, C. Subsea Cable Stability on Rocky Seabeds: Comparison of Field Observations Against Conventional and Novel Design Methods. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering—OMAE, New York, NY, USA, 30 December 2018; American Society of Mechanical Engineers: New York, NY, USA, 2018; Volume 5. [Google Scholar]
- Colefax, A.P.; Butcher, P.A.; Kelaher, B.P. The potential for unmanned aerial vehicles (UAVs) to conduct marine fauna surveys in place of manned aircraft. ICES J. Mar. Sci. 2018, 75, 1–8. [Google Scholar] [CrossRef]
- Hodgson, J.C.; Koh, L.P. Best practice for minimising unmanned aerial vehicle disturbance to wildlife in biological field research. Curr. Biol. 2016, 26, R404–R405. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Civil Aviation Authority UK CAA Drone Code. Available online: https://dronesafe.uk/wp-content/uploads/2019/11/Drone-Code_October2019.pdf (accessed on 18 August 2020).
- DJI. DJI Phantom 4 Pro—Specs, Tutorials & Guides—DJI. Available online: https://www.dji.com/uk/phantom-4-pro/info#specs (accessed on 17 July 2020).
- Longuet-Higgins, M.S. Surface manifestations of turbulent flow. J. Fluid Mech. 1996, 308, 15–29. [Google Scholar] [CrossRef]
- McIlvenny, J.; Williamson, B.J.; MacDowall, C.; Gleizon, P.; O’Hara Murray, R. Modelling hydrodynamics of fast tidal stream around a promontory headland. 2021; in review. [Google Scholar]
- Zamon, J.E. Mixed species aggregations feeding upon herring and sandlance schools in a nearshore archipelago depend on flooding tidal currents. Mar. Ecol. Prog. Ser. 2003, 261, 243–255. [Google Scholar] [CrossRef]
- QGIS 23.2.1. Raster Analysis—QGIS Documentation. Available online: https://docs.qgis.org/3.10/en/docs/user_manual/processing_algs/gdal/rasteranalysis.html?highlight=roughness#roughness (accessed on 18 August 2020).
- Wood, S.N. Fast stable restricted maximum likelihood and marginal likelihood estimation of semiparametric generalized linear models. J. R. Stat. Soc. Ser. B Stat. Methodol. 2010, 73, 3–36. [Google Scholar] [CrossRef] [Green Version]
- Pedersen, E.J.; Miller, D.L.; Simpson, G.L.; Ross, N. Hierarchical generalized additive models in ecology: An introduction with mgcv. PeerJ 2019, 7, e6876. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marra, G.; Wood, S.N. Practical variable selection for generalized additive models. Comput. Stat. Data Anal. 2011, 55, 2372–2387. [Google Scholar] [CrossRef]
- Kadota, A.; Nezu, I. Three-dimensional structure of space-time correlation on coherent vortices generated behind dune crest. J. Hydraul. Res. 1999, 37, 59–80. [Google Scholar] [CrossRef]
- Stoesser, T.; Braun, C.; García-Villalba, M.; Rodi, W. Turbulence Structures in Flow over Two-Dimensional Dunes. J. Hydraul. Eng. 2008, 134, 42–55. [Google Scholar] [CrossRef]
- Nezu, I.; Tominaga, A.; Nakagawa, H. Field Measurements of Secondary Currents in Straight Rivers. J. Hydraul. Eng. 1993, 119, 598–614. [Google Scholar] [CrossRef]
- Kwoll, E.; Venditti, J.G.; Bradley, R.W.; Winter, C. Observations of Coherent Flow Structures Over Subaqueous High- and Low- Angle Dunes. J. Geophys. Res. Earth Surf. 2017, 122, 2244–2268. [Google Scholar] [CrossRef]
- Kostaschuk, R.A.; Church, M.A. Macroturbulence generated by dunes: Fraser River, Canada. Sediment. Geol. 1993, 85, 25–37. [Google Scholar] [CrossRef]
- Ikhennicheu, M.; Gaurier, B.; Druault, P.; Germain, G. Experimental analysis of the floor inclination effect on the turbulent wake developing behind a wall mounted cube. Eur. J. Mech. B/Fluids 2018, 72, 340–352. [Google Scholar] [CrossRef] [Green Version]
- Mao, Y. The effects of turbulent bursting on the sediment movement in suspension. Int. J. Sediment Res. 2003, 18, 148–157. [Google Scholar]
- Mercier, P.; Grondeau, M.; Guillou, S.; Thiébot, J.; Poizot, E. Numerical study of the turbulent eddies generated by the seabed roughness. Case study at a tidal power site. Appl. Ocean Res. 2020, 97, 102082. [Google Scholar] [CrossRef]
- Blackmore, T.; Myers, L.E.; Bahaj, A.S. Effects of turbulence on tidal turbines: Implications to performance, blade loads, and condition monitoring. Int. J. Mar. Energy 2016, 14, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Osalusi, E.; Side, J.; Harris, R. Structure of turbulent flow in EMEC’s tidal energy test site. Int. Commun. Heat Mass Transf. 2009, 36, 422–431. [Google Scholar] [CrossRef]
- Scherelis, C.; Penesis, I.; Hemer, M.A.; Cossu, R.; Wright, J.T.; Guihen, D. Investigating biophysical linkages at tidal energy candidate sites: A case study for combining environmental assessment and resource characterisation. Renew. Energy 2020, 159, 399–413. [Google Scholar] [CrossRef]
- Shields, M.A.; Woolf, D.K.; Grist, E.P.; Kerr, S.A.; Jackson, A.C.; Harris, R.E.; Bell, M.C.; Beharie, R.; Want, A.; Osalusi, E.; et al. Marine renewable energy: The ecological implications of altering the hydrodynamics of the marine environment. Ocean Coast. Manag. 2011, 54, 2–9. [Google Scholar] [CrossRef]
- Waggitt, J.J.; Scott, B.E. Using a spatial overlap approach to estimate the risk of collisions between deep diving seabirds and tidal stream turbines: A review of potential methods and approaches. Mar. Policy 2014, 44, 90–97. [Google Scholar] [CrossRef] [Green Version]
- Isaksson, N.; Masden, E.A.; Williamson, B.J.; Costagliola-Ray, M.M.; Slingsby, J.; Houghton, J.D.R.; Wilson, J. Assessing the effects of tidal stream marine renewable energy on seabirds: A conceptual framework. Mar. Pollut. Bull. 2020, 157, 111314. [Google Scholar] [CrossRef]
- Johnston, D.T.; Furness, R.W.; Robbins, A.M.C.; Tyler, G.; Taggart, M.A.; Masden, E.A. Black guillemot ecology in relation to tidal stream energy generation: An evaluation of current knowledge and information gaps. Mar. Environ. Res. 2018, 134, 121–129. [Google Scholar] [CrossRef]
- Williamson, B.J.; Fraser, S.; Blondel, P.; Bell, P.S.; Waggitt, J.J.; Scott, B.E. Multisensor Acoustic Tracking of Fish and Seabird Behavior around Tidal Turbine Structures in Scotland. IEEE J. Ocean. Eng. 2017, 42, 948–965. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV and Camera Specifications | 2016 | 2018 |
|---|---|---|
| UAV | SwellPro SplashDrone 3+ | DJI Phantom 4 Advanced V2.0 |
| Camera | GoPro HERO4 Black (12 MP) | 1-inch CMOS Sensor (20 MP) |
| Aspect Ratio | 4:3 (4000 × 3000 pixels) | 3:2 (5472 × 3648 pixels) |
| Average Relative Altitude Flown (m) | 46 | 70 |
| Image Type Taken | JPEG | Simultaneous pairs of RAW and JPEG |
| Sampling Interval between Images/Image Pairs (Seconds) | 1 (subsampled to match 2018 data) | 5 |
| Average Image Area (m2) | 5119.56 | 11,577.52 |
| Parametric Coefficients: | Model Summary: |
|---|---|
| Tidal Phase: Decreasing Ebb (Intercept, α0) | Estimate = −1.627 |
| Std. Error = 1.425 | |
| z = −1.141 | |
| p = 0.254 | |
| Tidal Phase: Decreasing Flood (α1) | Estimate = −0.747 |
| Std. Error = 1.715 | |
| z = −0.435 | |
| p = 0.663 | |
| Tidal Phase: Fast Ebb (α2) | Estimate = −2.410 |
| Std. Error = 1.586 | |
| z = −1.519 | |
| p = 0.129 | |
| Tidal Phase: Fast Flood (α3) Tidal Phase: Increasing Flood (α4) | Estimate = −3.113 |
| Std. Error = 1.560 | |
| z = −1.996 | |
| p = 0.046 | |
| Estimate = −3.808 | |
| Std. Error = 2.529 | |
| z = −1.506 | |
| p = 0.132 | |
| Smooth Terms: | |
| Current Velocity () | EDF = 6.093 |
| Chi.sq = 24,747.999 | |
| p ≤ 0.001 | |
| Seabed Slope Angle () | EDF = 7.567 × 10−1 |
| Chi.sq = 3.903 | |
| p = 0.039 | |
| Depth () | EDF = 1.878 |
| Chi.sq = 142.214 | |
| p = 0.003 | |
| Current Direction () | EDF = 5.887 × 10−1 |
| Chi.sq = 5.611 | |
| p = 0.221 | |
| Current Velocity/ Seabed Slope Angle () | EDF = 1.633 |
| Chi.sq = 13.378 | |
| p = 0.002 | |
| Current Direction/ Seabed Slope Aspect () | EDF = 2.119 |
| Chi.sq = 5.878 | |
| p = 0.042 | |
| R2 (adj.) = 0.203 Deviance explained = 30.2% | |
| n = 7236 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Slingsby, J.; Scott, B.E.; Kregting, L.; McIlvenny, J.; Wilson, J.; Couto, A.; Roos, D.; Yanez, M.; Williamson, B.J. Surface Characterisation of Kolk-Boils within Tidal Stream Environments Using UAV Imagery. J. Mar. Sci. Eng. 2021, 9, 484. https://doi.org/10.3390/jmse9050484
Slingsby J, Scott BE, Kregting L, McIlvenny J, Wilson J, Couto A, Roos D, Yanez M, Williamson BJ. Surface Characterisation of Kolk-Boils within Tidal Stream Environments Using UAV Imagery. Journal of Marine Science and Engineering. 2021; 9(5):484. https://doi.org/10.3390/jmse9050484
Chicago/Turabian StyleSlingsby, James, Beth E. Scott, Louise Kregting, Jason McIlvenny, Jared Wilson, Ana Couto, Deon Roos, Marion Yanez, and Benjamin J. Williamson. 2021. "Surface Characterisation of Kolk-Boils within Tidal Stream Environments Using UAV Imagery" Journal of Marine Science and Engineering 9, no. 5: 484. https://doi.org/10.3390/jmse9050484