
Intelligent Fault Identification for Rolling Bearings Fusing Average Refined Composite Multiscale Dispersion Entropy-Assisted Feature Extraction and SVM with Multi-Strategy Enhanced Swarm Optimization


Abstract
:1. Introduction
- (1)
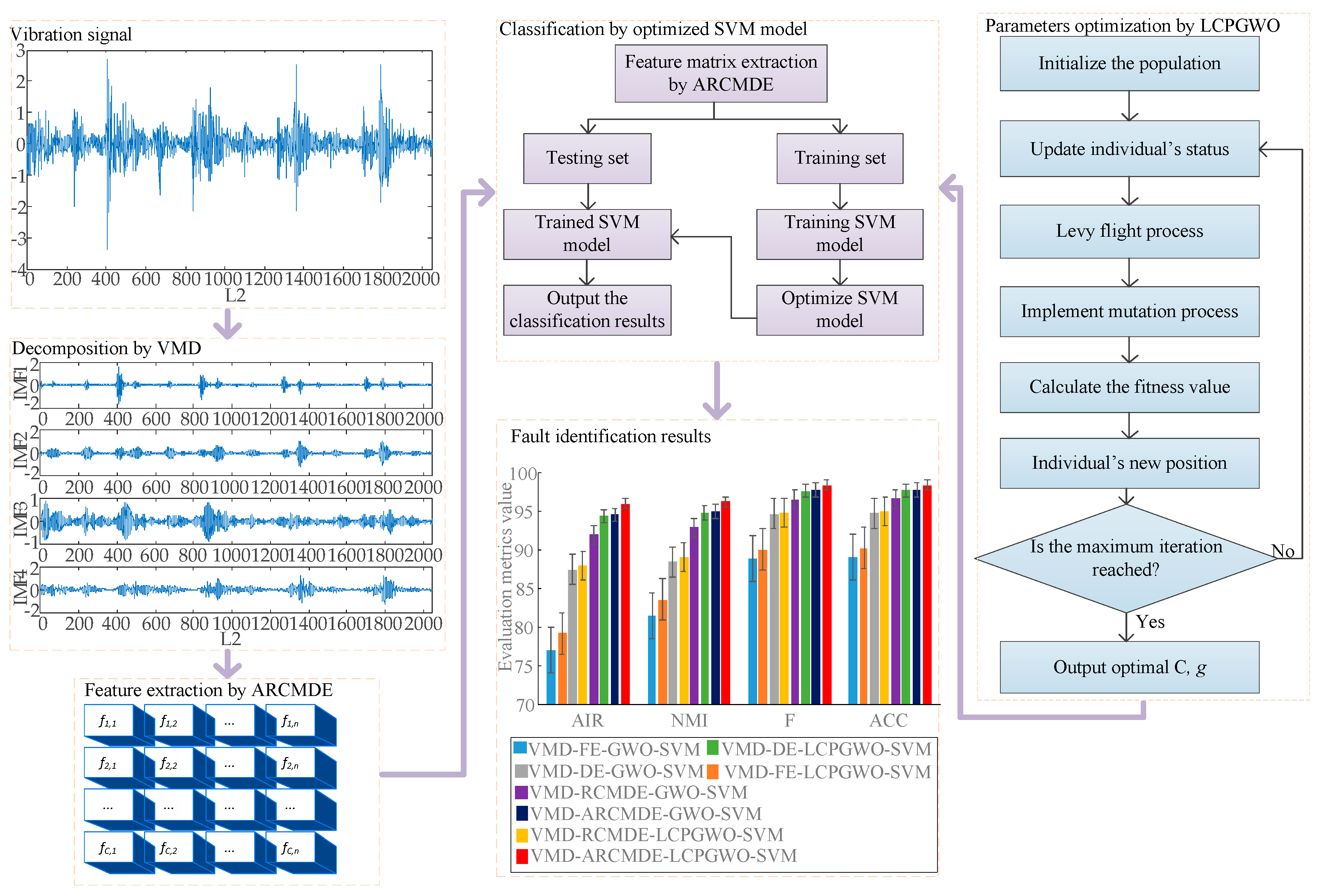
- Average refined composite multiscale dispersion entropy (ARCMDE) was proposed to enhance the ability of fault feature extraction.
- (2)
- A novel multistrategy enhanced swarm optimizer (LCPGWO) was proposed to calibrate the parameters of SVM, which made it an excellent fault identification model.
- (3)
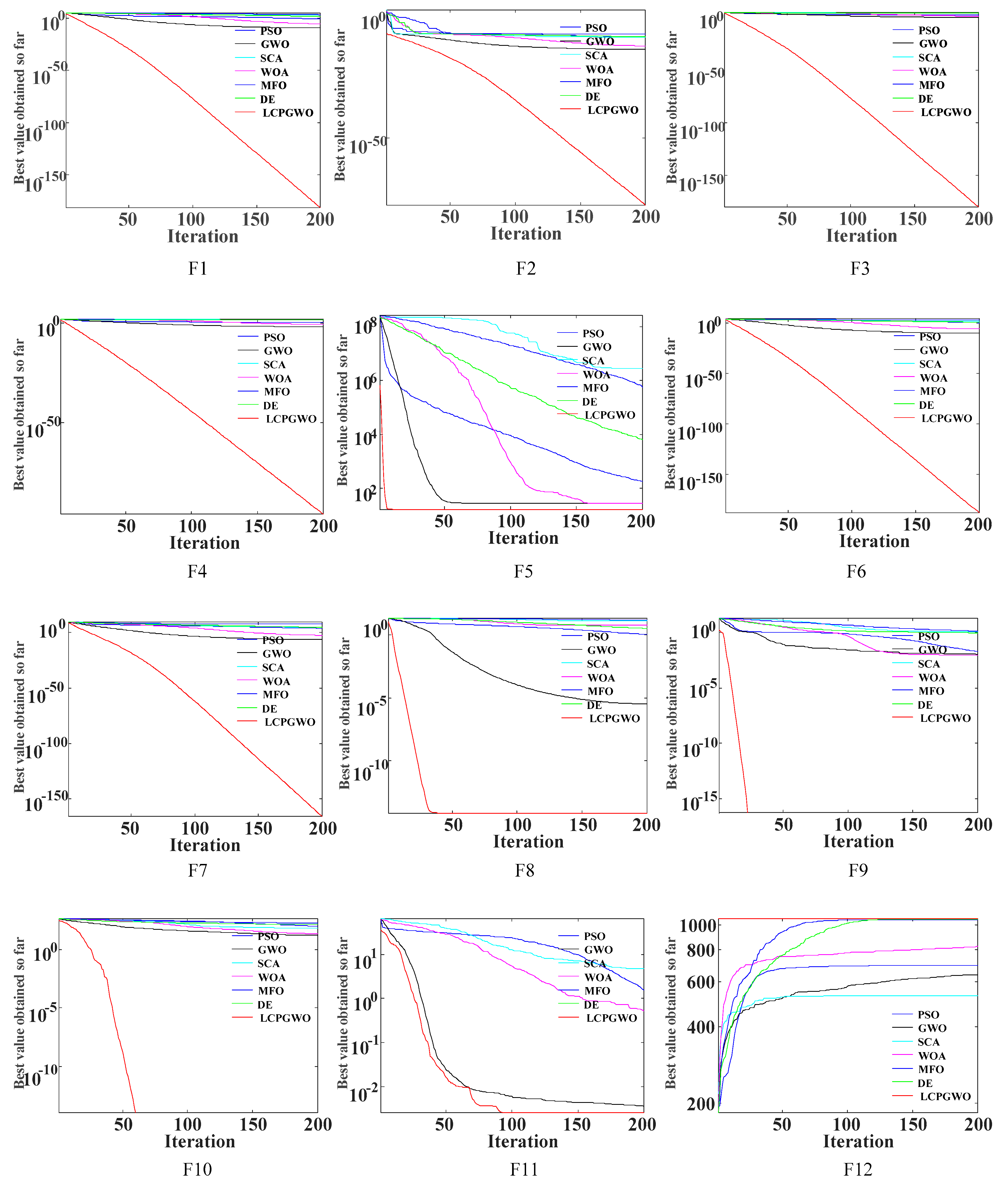
- The effectiveness of LCPGWO was verified by performance analysis with 12 well-known benchmark functions.
- (4)
- The superiority of the proposed fault identification method was ascertained by engineering experiment and comparative analysis.
2. Fundamental Theories
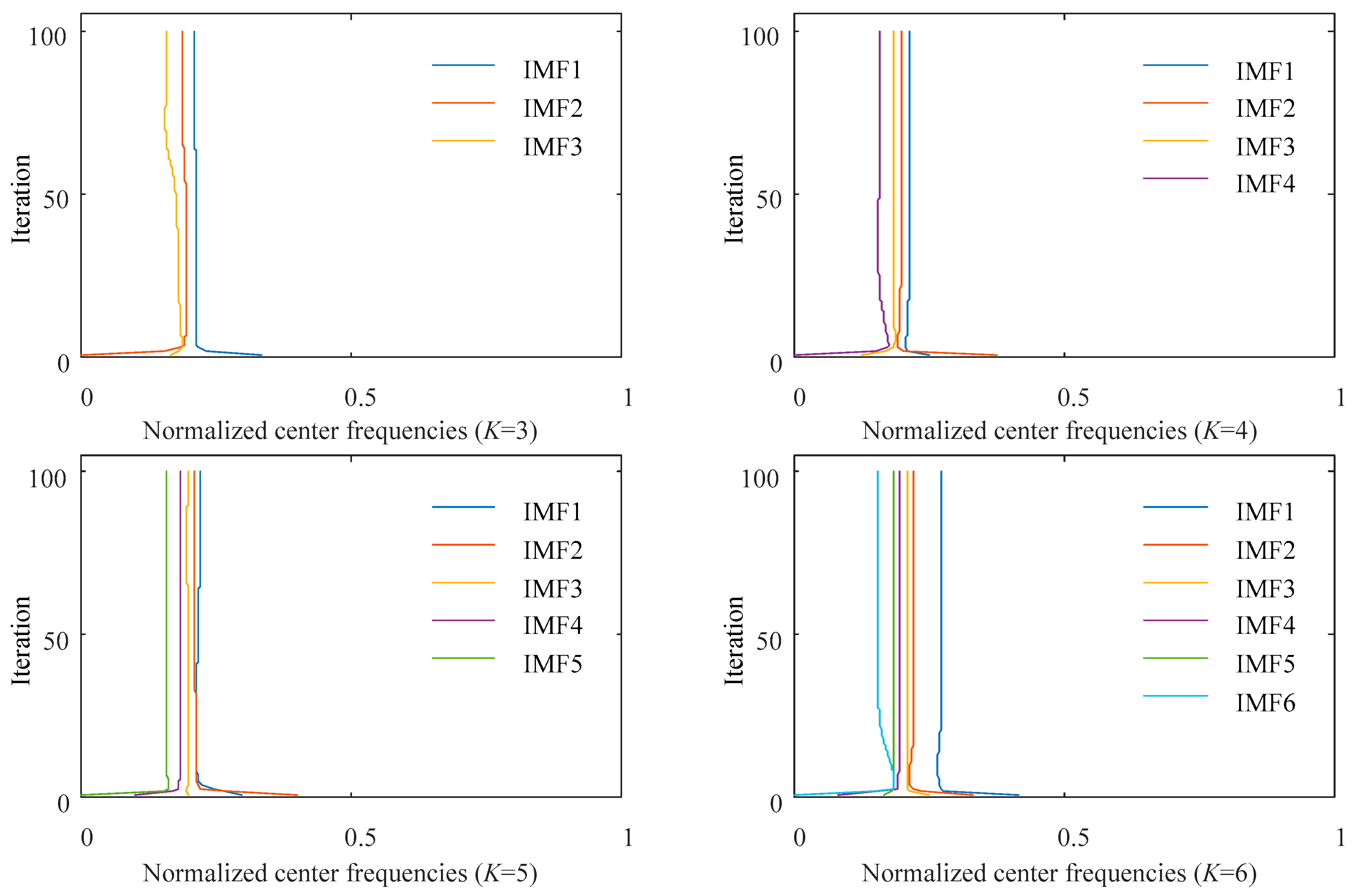
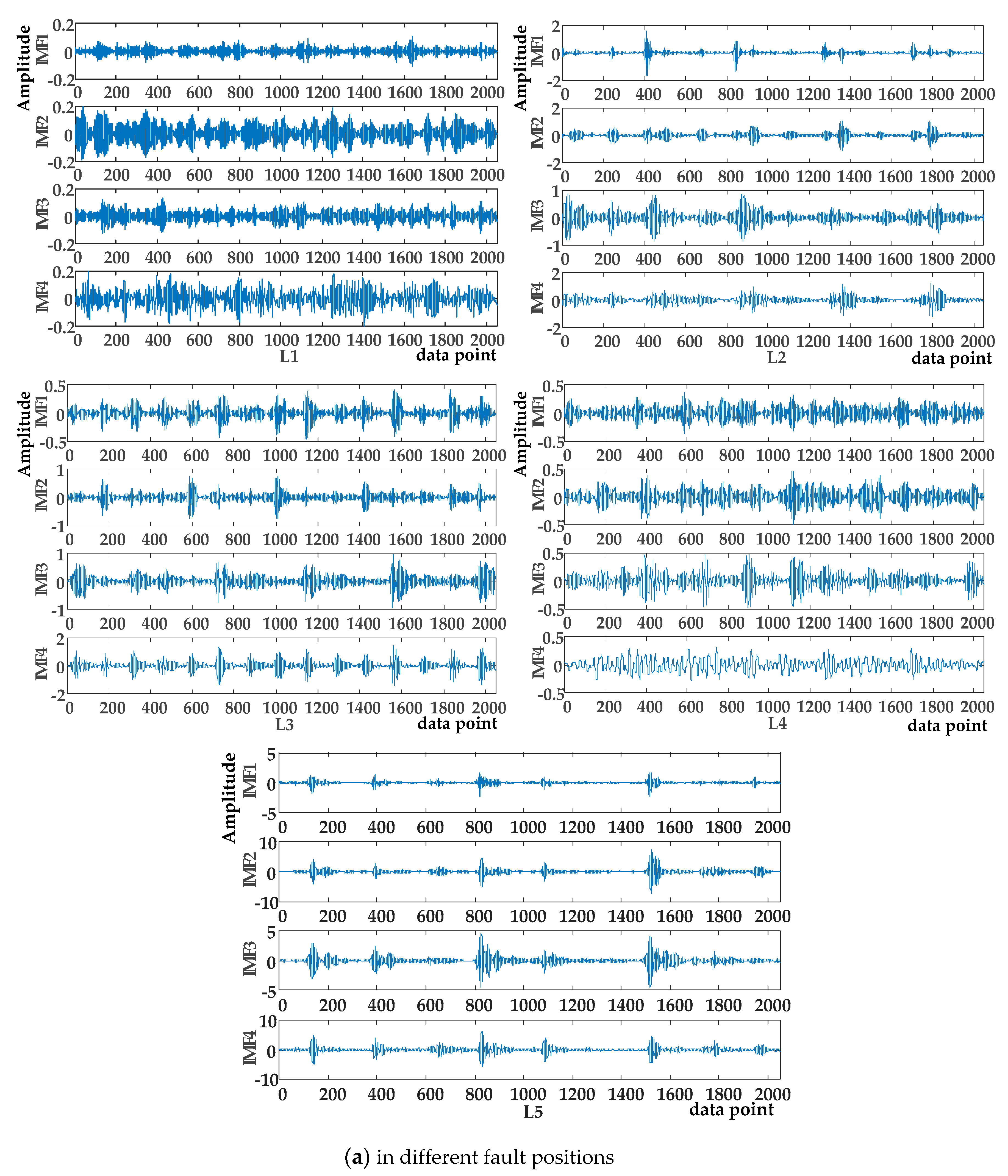
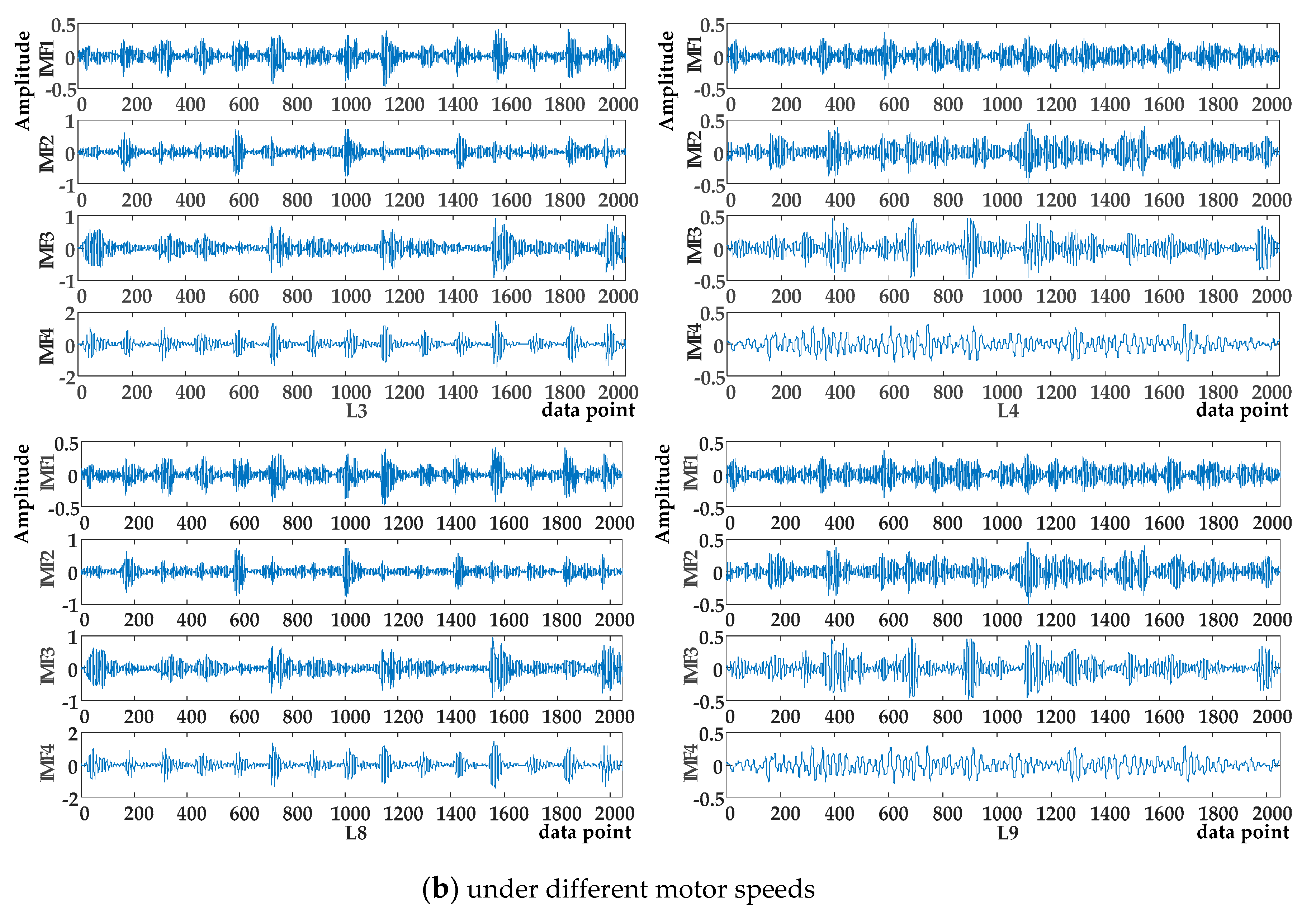
2.1. Variational Mode Decomposition
2.2. Support Vector Machine
3. Intelligent Fault Identification for Rolling Bearings Fusing the Proposed Method
3.1. Average Refined Composite Multiscale Dispersion Entropy
3.1.1. Dispersion Entropy
3.1.2. Average Refined Composite Multiscale Dispersion Entropy
3.2. GWO Coupled with Multiple Enhancement Strategies
3.2.1. Grey Wolf Optimization
| Algorithm 1. The algorithm pseudocode of GWO. |
|
3.2.2. Grey Wolf Optimization Coupled with Multiple Enhancement Strategies
| Algorithm 2. The algorithm pseudocode of LCPGWO. |
|
3.2.3. Experimental Study and Results Analysis
Benchmark Functions
Comparison and Analysis with Different Algorithms
3.3. SVM Optimized by LCPGWO
3.4. Intelligent Fault Identification for Rolling Bearings Fusing the Proposed Method
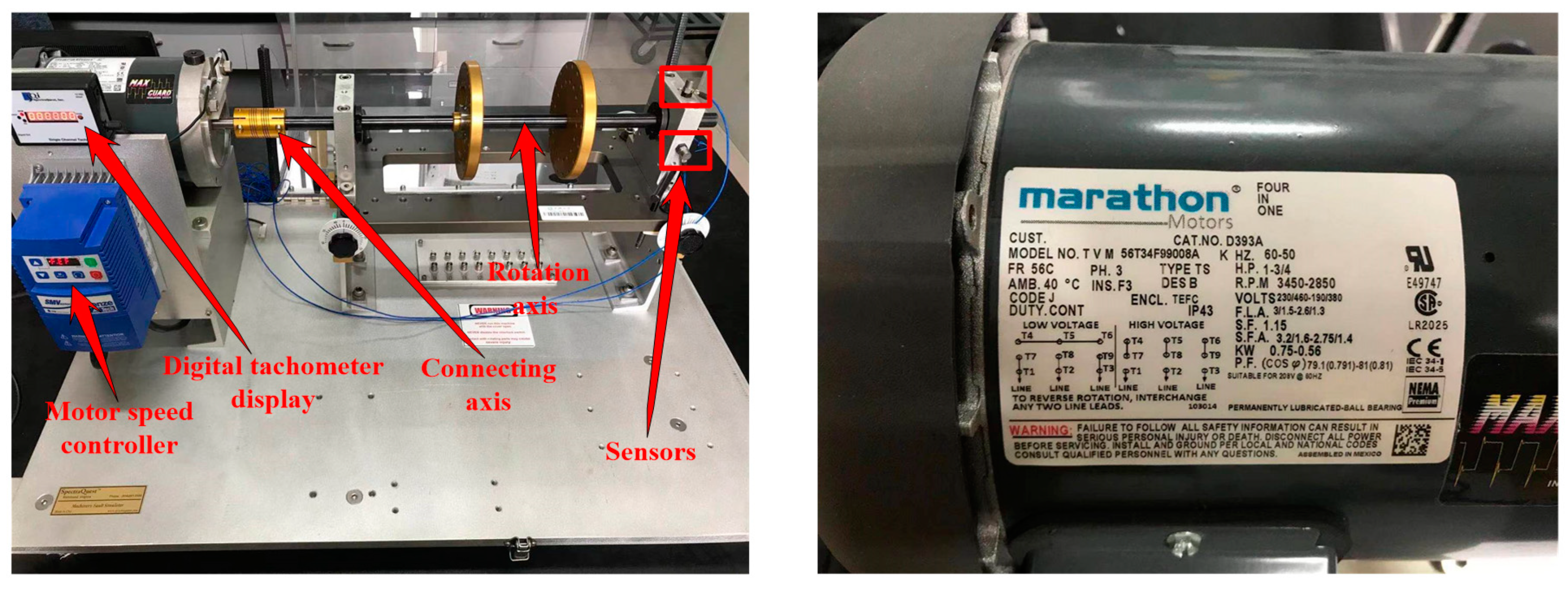
4. Engineering Application
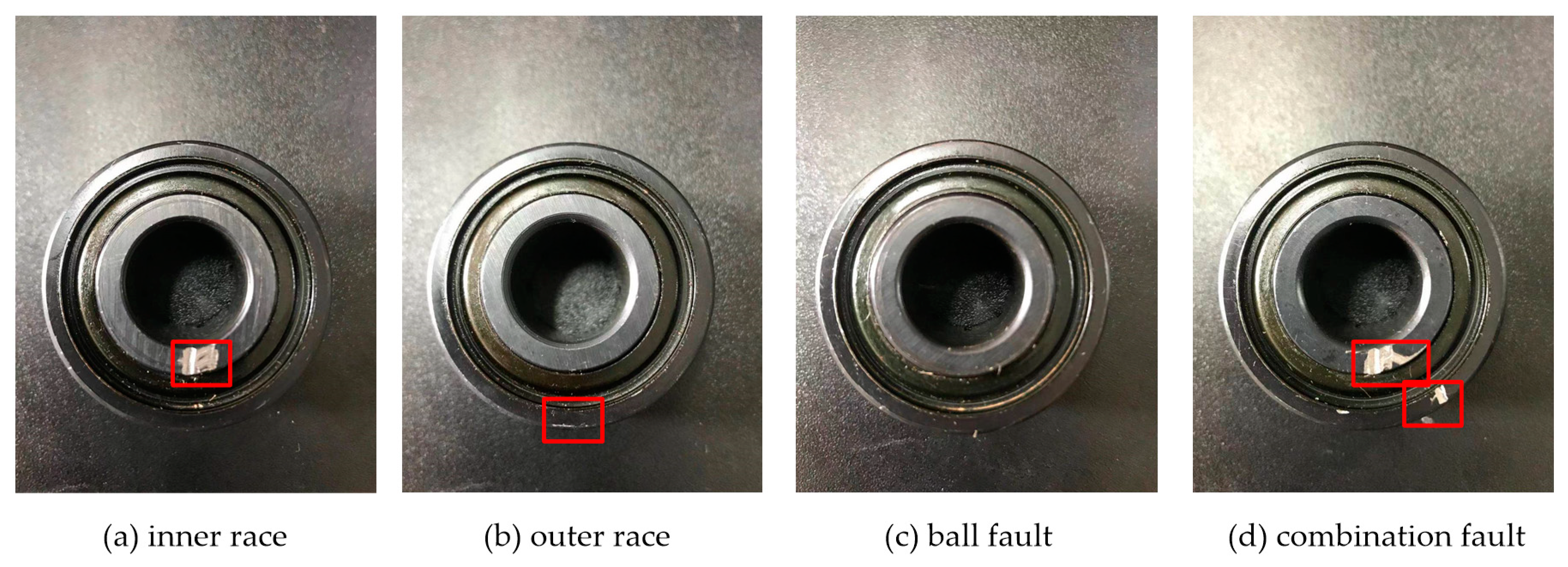
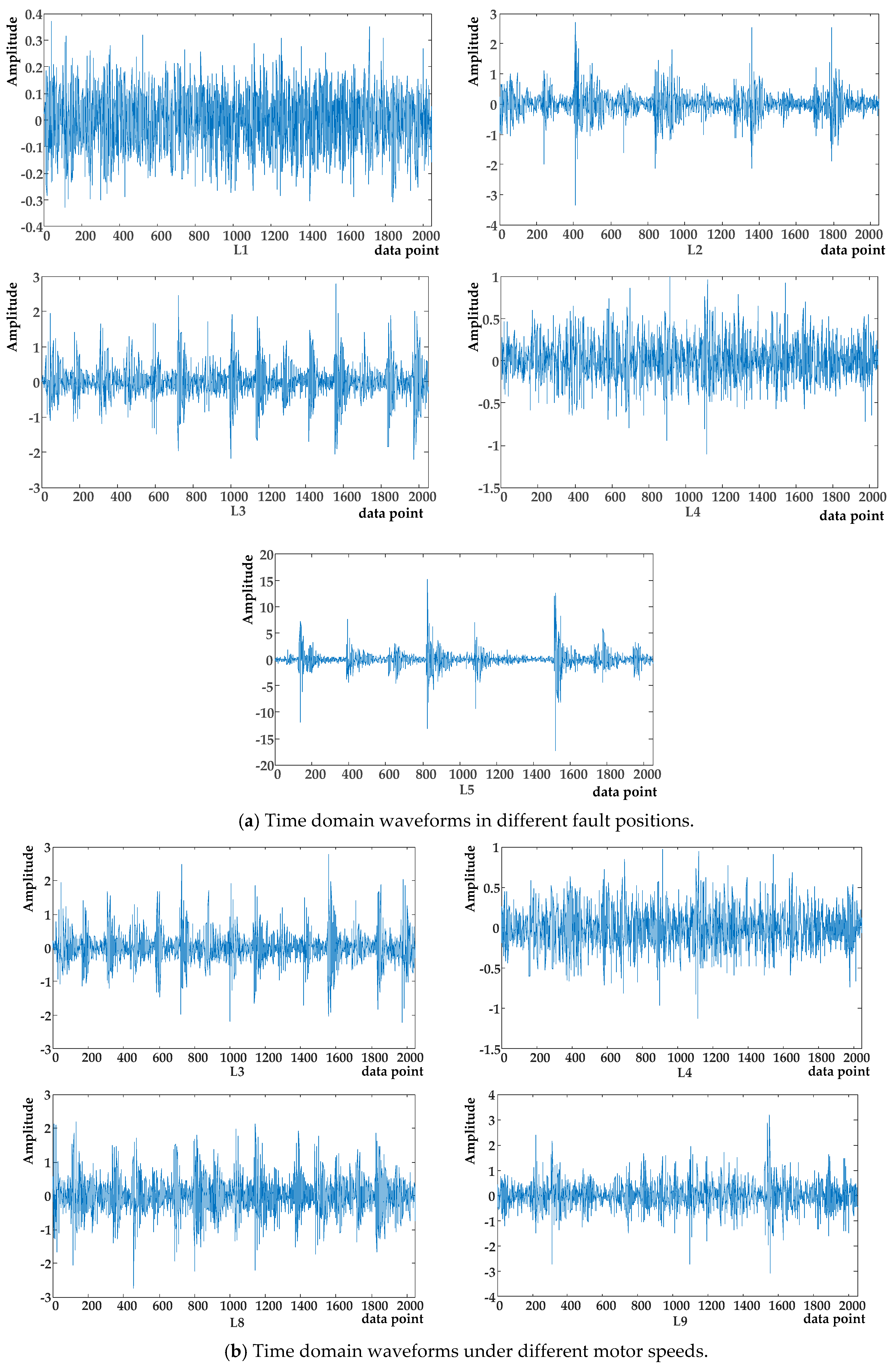
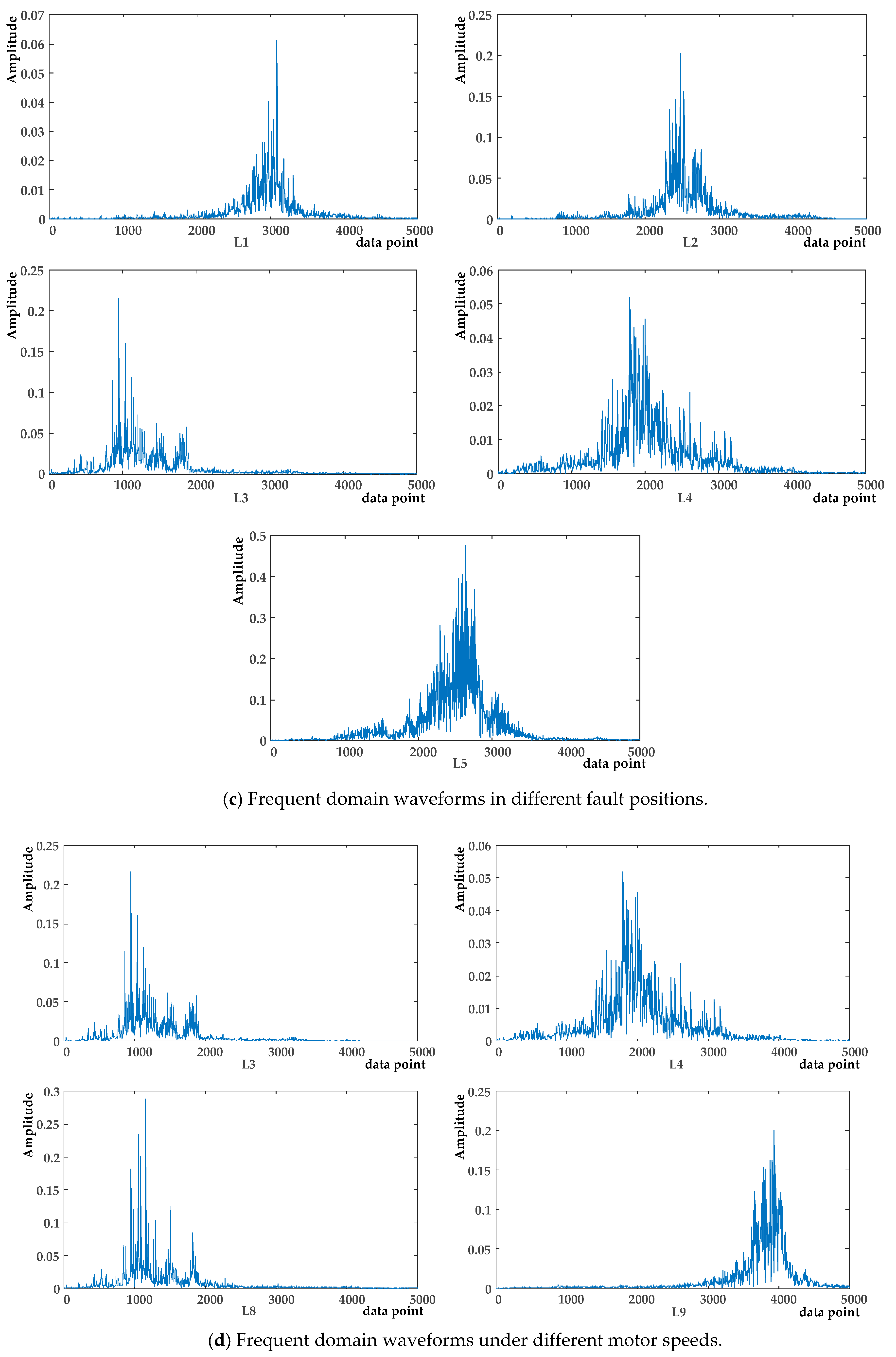
4.1. Data Collection
4.2. Application to Fault Identification of Rolling Bearings
5. Conclusions
6. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, X.; Qin, Y.; He, C.; Jia, L.; Kou, L. Rolling element bearing fault diagnosis under impulsive noise environment based on cyclic correntropy spectrum. Entropy 2019, 21, 50. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Zhou, J.; Lei, Y.; Du, W. Bearing fault diagnosis method based on adaptive maximum cyclostationarity blind deconvolution. Mech. Syst. Signal Process. 2021, in press. [Google Scholar]
- Xu, L.; Chatterton, S.; Pennacchi, P. Condition monitoring of rolling element bearing based on moving average cross-correlation of power spectral density. In Proceedings of the IFToMM World Congress on Mechanism and Machine Science, Krakow, Poland, 15–18 July 2019; Springer: Cham, Switzerland, 2019; pp. 3411–3418. [Google Scholar]
- Xu, L.; Chatterton, S.; Pennacchi, P. A novel method of frequency band selection for squared envelope analysis for fault diagnosing of rolling element bearings in a locomotive powertrain. Sensors 2018, 18, 4344. [Google Scholar] [CrossRef] [Green Version]
- Glowacz, A. Recognition of acoustic signals of induction motor using fft, smofs-10 and isvm. Eksploat. Niezawodn. 2015, 17, 569–574. [Google Scholar] [CrossRef]
- Sun, S.; Przystupa, K.; Wei, M.; Yu, H.; Ye, Z.; Kochan, O. Fast bearing fault diagnosis of rolling element using Lévy Moth-Flame optimization algorithm and Naive Bayes. Eksploat. Niezawodn. 2020, 22, 730–740. [Google Scholar] [CrossRef]
- Xu, L.; Pennacchi, P.; Chatterton, S. A new method for the estimation of bearing health state and remaining useful life based on the moving average cross-correlation of power spectral density. Mech. Syst. Signal Process. 2020, 139, 106617. [Google Scholar] [CrossRef] [Green Version]
- Hernandez-Muriel, J.A.; Bermeo-Ulloa, J.B.; Holguin-Londono, M.; Alvarez-Meza, A.M.; Orozco-Gutierrez, A.A. Bearing health monitoring using relief-F-based feature relevance analysis and HMM. Appl. Sci. 2020, 10, 5170. [Google Scholar] [CrossRef]
- Gradzki, R.; Kulesza, Z.; Bartoszewicz, B. Method of shaft crack detection based on squared gain of vibration amplitude. Nonlinear Dyn. 2019, 98, 671–690. [Google Scholar] [CrossRef] [Green Version]
- Gradzki, R.; Lindstedt, P.; Kulesza, Z.; Bartoszewicz, B. Rotor blades diagnosis method based on differences in phase shifts. Shock Vib. 2018, 2018. [Google Scholar] [CrossRef]
- Fu, W.; Wang, K.; Tan, J.; Zhang, K. A composite framework coupling multiple feature selection, compound prediction models and novel hybrid swarm optimizer-based synchronization optimization strategy for multi-step ahead short-term wind speed forecasting. Energy Convers. Manag. 2020, 205, 112461. [Google Scholar] [CrossRef]
- Xiong, D.; Fu, W.; Wang, K.; Fang, P.; Chen, T.; Zou, F. A blended approach incorporating TVFEMD, PSR, NNCT-based multi-model fusion and hierarchy-based merged optimization algorithm for multi-step wind speed prediction. Energy Convers. Manag. 2021, 230, 113680. [Google Scholar] [CrossRef]
- Smith, J.S. The local mean decomposition and its application to EEG perception data. J. R. Soc. Interface 2005, 2, 443–454. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Wang, R.; Li, C.; Fu, W.; Tang, G. Deep learning method based on gated recurrent unit and variational mode decomposition for short-term wind power interval prediction. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 3814–3827. [Google Scholar] [CrossRef] [PubMed]
- Cheng, J.; Yang, Y.; Yang, Y. A rotating machinery fault diagnosis method based on local mean decomposition. Digit. Signal Process. 2012, 22, 356–366. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. A study of the characteristics of white noise using the empirical mode decomposition method. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 2004, 460, 1597–1611. [Google Scholar] [CrossRef]
- Zhang, M.; Jiang, Z.; Feng, K. Research on variational mode decomposition in rolling bearings fault diagnosis of the multistage centrifugal pump. Mech. Syst. Signal Process. 2017, 93, 460–493. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Pan, H. Use of generalized refined composite multiscale fractional dispersion entropy to diagnose the faults of rolling bearing. Nonlinear Dyn. 2020, 101, 1417–1440. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, N.; Li, N.; Du, W.; Wang, J. A new fault diagnosis method based on adaptive spectrum mode extraction. Struct. Health Monit. 2021. [Google Scholar] [CrossRef]
- Zhang, W.; Zhou, J. Fault diagnosis for rolling element bearings based on feature space reconstruction and multiscale permutation entropy. Entropy 2019, 21, 519. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, F.; Kou, Z.; Wu, J.; Li, T. Application of mutual information-sample entropy based MED-ICEEMDAN de-noising scheme for weak fault diagnosis of hoist bearing. Entropy 2018, 20, 667. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Cheng, J.; Yang, Y. A rolling bearing fault diagnosis approach based on LCD and fuzzy entropy. Mech. Mach. Theory 2013, 70, 441–453. [Google Scholar] [CrossRef]
- Wang, K.; Fu, W.; Chen, T.; Zhang, B.; Xiong, D.; Fang, P. A compound framework for wind speed forecasting based on comprehensive feature selection, quantile regression incorporated into convolutional simplified long short-term memory network and residual error correction. Energy Convers. Manag. 2020, 222, 113234. [Google Scholar] [CrossRef]
- Yan, R.; Liu, Y.; Gao, R.X. Permutation entropy: A nonlinear statistical measure for status characterization of rotary machines. Mech. Syst. Signal Process. 2012, 29, 474–484. [Google Scholar] [CrossRef]
- Rostaghi, M.; Azami, H. Dispersion entropy: A measure for time-series analysis. IEEE Signal Process. Lett. 2016, 23, 610–614. [Google Scholar] [CrossRef]
- Shao, K.; Fu, W.; Tan, J.; Wang, K. Coordinated approach fusing time-shift multiscale dispersion entropy and vibrational Harris hawks optimization-based SVM for fault diagnosis of rolling bearing. Measurement 2021, 173, 108580. [Google Scholar] [CrossRef]
- Yu, Y.; Yu, D.; Cheng, J. A roller bearing fault diagnosis method based on EMD energy entropy and ANN. J. Sound Vib. 2006, 294, 269–277. [Google Scholar] [CrossRef]
- Raj, N.; Jagadanand, G.; George, S. Fault detection and diagnosis in asymmetric multilevel inverter using artificial neural network. Int. J. Electron. 2018, 105, 559–571. [Google Scholar] [CrossRef]
- Cai, B.; Huang, L.; Xie, M. Bayesian Networks in Fault Diagnosis. IEEE Trans. Ind. Inform. 2017, 13, 2227–2240. [Google Scholar] [CrossRef]
- Fu, W.; Wang, K.; Zhang, C.; Tan, J. A hybrid approach for measuring the vibrational trend of hydroelectric unit with enhanced multi-scale chaotic series analysis and optimized least squares support vector machine. Trans. Inst. Meas. Control 2019, 41, 4436–4449. [Google Scholar] [CrossRef]
- Chen, S.; Samingan, A.K.; Hanzo, L. Support vector machine multiuser receiver for DS-CDMA signals in multipath channels. IEEE Trans. Neural Netw. 2001, 12, 604–611. [Google Scholar] [CrossRef]
- Fu, W.; Lu, Q. Multiobjective optimal control of FOPID controller for hydraulic turbine governing systems based on reinforced multiobjective Harris Hawks optimization coupling with hybrid strategies. Complexity 2020, 2020, 9274980. [Google Scholar] [CrossRef]
- Fu, W.; Zhang, K.; Wang, K.; Wen, B.; Fang, P.; Zou, F. A hybrid approach for multi-step wind speed forecasting based on two-layer decomposition, improved hybrid DE-HHO optimization and KELM. Renew. Energy 2021, 164, 211–229. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Xiao, Y.; Kang, N.; Hong, Y.; Zhang, G. Misalignment fault diagnosis of DFWT based on IEMD energy entropy and PSO-SVM. Entropy 2017, 19, 6. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-Flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl. Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Das, S.; Suganthan, P.N. Differential evolution: A survey of the state-of-the-art. IEEE Trans. Evol. Comput. 2010, 15, 4–31. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl. Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Haklı, H.; Uğuz, H. A novel particle swarm optimization algorithm with Levy flight. Appl. Soft Comput. 2014, 23, 333–345. [Google Scholar] [CrossRef]
- Zeng, G.-Q.; Chen, J.; Li, L.-M.; Chen, M.-R.; Wu, L.; Dai, Y.-X.; Zheng, C.-W. An improved multi-objective population-based extremal optimization algorithm with polynomial mutation. Inf. Sci. 2016, 330, 49–73. [Google Scholar] [CrossRef]
- Chan, R.H.; Tao, M.; Yuan, X. Constrained total variation deblurring models and fast algorithms based on alternating direction method of multipliers. SIAM J. Imaging Sci. 2013, 6, 680–697. [Google Scholar] [CrossRef]
- Emary, E.; Zawbaa, H.M.; Hassanien, A.E. Binary grey wolf optimization approaches for feature selection. Neurocomputing 2016, 172, 371–381. [Google Scholar] [CrossRef]
- Rodríguez, L.; Castillo, O.; Soria, J.; Melin, P.; Valdez, F.; Gonzalez, C.I.; Martinez, G.E.; Soto, J. A fuzzy hierarchical operator in the grey wolf optimizer algorithm. Appl. Soft Comput. 2017, 57, 315–328. [Google Scholar] [CrossRef]
- Zhang, X.; Kang, Q.; Tu, Q.; Cheng, J.; Wang, X. Efficient and merged biogeography-based optimization algorithm for global optimization problems. Soft Comput. 2019, 23, 4483–4502. [Google Scholar] [CrossRef]
- Sun, L.; Chen, S.; Xu, J.; Tian, Y. Improved monarch butterfly optimization algorithm based on opposition-based learning and random local perturbation. Complexity 2019, 2019, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Kang, Q.; Cheng, J.; Wang, X. A novel hybrid algorithm based on biogeography-based optimization and grey wolf optimizer. Appl. Soft Comput. 2018, 67, 197–214. [Google Scholar] [CrossRef]
- Fu, W.; Shao, K.; Tan, J.; Wang, K. Fault diagnosis for rolling bearings based on composite multiscale fine-sorted dispersion entropy and SVM with hybrid mutation SCA-HHO algorithm optimization. IEEE Access 2020, 8, 13086–13104. [Google Scholar] [CrossRef]
- Zhang, W.; Zhou, J. A comprehensive fault diagnosis method for rolling bearings based on refined composite multiscale dispersion entropy and fast ensemble empirical mode decomposition. Entropy 2019, 21, 680. [Google Scholar] [CrossRef] [Green Version]
- Azami, H.; Rostaghi, M.; Abasolo, D.; Escudero, J. Refined composite multiscale dispersion entropy and its application to biomedical signals. IEEE Trans. Biomed. Eng. 2017, 64, 2872–2879. [Google Scholar] [PubMed] [Green Version]
- Cheng, X.; Wang, P.; She, C. Biometric identification method for heart sound based on multimodal multiscale dispersion entropy. Entropy 2020, 22, 238. [Google Scholar] [CrossRef] [Green Version]
- Fahad, A.; Alshatri, N.; Tari, Z.; Alamri, A.; Khalil, I.; Zomaya, A.Y.; Foufou, S.; Bouras, A. A survey of clustering algorithms for big data: Taxonomy and empirical analysis. IEEE Trans. Emerg. Top. Comput. 2014, 2, 267–279. [Google Scholar] [CrossRef]
- Liu, Z.; Cao, H.; Chen, X.; He, Z.; Shen, Z. Multi-Fault classification based on wavelet SVM with PSO algorithm to analyze vibration signals from rolling element bearings. Neurocomputing 2013, 99, 399–410. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Function | Range | Fmin |
|---|---|---|---|
| 1 | [−100, 100] | 0 | |
| 2 | [−10, 10] | 0 | |
| 3 | [−100, 100] | 0 | |
| 4 | [−100, 100] | 0 | |
| 5 | [−30, 30] | 0 | |
| 6 | [−10, 10] | 0 | |
| 7 | [−100, 100] | 0 | |
| 8 | [−32, 32] | 0 | |
| 9 | [−100, 100] | 0 | |
| 10 | [−5.12, 5.12] | 0 | |
| 11 | [−10, 10] | 0 | |
| 12 | [−50, 50] | 0 |
| Models | Parameter | Determination Approach | Range Determined Value |
|---|---|---|---|
| PSO | iteration number | preset | 200 |
| searching agents | preset | 40 | |
| dimensions | preset | 30 | |
| GWO | iteration number | preset | 200 |
| searching agents | preset | 40 | |
| dimensions | preset | 30 | |
| SCA | iteration number | preset | 200 |
| searching agents | preset | 40 | |
| dimensions | preset | 30 | |
| WOA | iteration number | preset | 200 |
| searching agents | preset | 40 | |
| dimensions | preset | 30 | |
| MFO | iteration number | preset | 200 |
| searching agents | preset | 40 | |
| dimensions | preset | 30 | |
| DE | iteration number | preset | 200 |
| searching agents | preset | 40 | |
| dimensions | preset | 30 | |
| LCPGWO | iteration number | preset | 200 |
| searching agents | preset | 40 | |
| dimensions | preset | 30 |
| Function | PSO | GWO | SCA | WOA | MFO | DE | LCPGWO | |
|---|---|---|---|---|---|---|---|---|
| F1 | Max | 2.19 × 10−1 | 1.69 × 10−9 | 1.21 × 103 | 9.99 × 10−6 | 1.86 × 103 | 6.17 × 101 | 1.29 × 10−181 |
| Min | 2.14 × 10−2 | 6.60 × 10−11 | 4.32 × 101 | 3.71 × 10−7 | 4.87 × 102 | 2.28 × 101 | 6.51 × 10−183 | |
| Mean | 1.17 × 10−1 | 3.62 × 10−10 | 4.33 × 102 | 3.12 × 10−6 | 1.14 × 103 | 3.46 × 101 | 3.04 × 10−182 | |
| Std | 6.24 × 10−2 | 4.87 × 10−10 | 4.43 × 102 | 3.07 × 10−6 | 4.22 × 102 | 1.18 × 101 | 0.00 | |
| F2 | Max | 2.22 × 100 | 1.34 × 10−6 | 3.79 × 100 | 1.28 × 10−4 | 5.33 × 101 | 2.22 × 100 | 1.82 × 10−83 |
| Min | 4.04 × 10−1 | 7.07 × 10−7 | 2.46 × 10−1 | 2.19 × 10−5 | 1.03 × 101 | 1.52 × 100 | 1.20 × 10−84 | |
| Mean | 9.68 × 10−1 | 9.95 × 10−7 | 1.42 × 100 | 4.85 × 10−5 | 2.99 × 101 | 1.75 × 100 | 7.58 × 10−84 | |
| Std | 5.24 × 10−1 | 1.88 × 10−7 | 1.07 × 100 | 3.25 × 10−5 | 1.39 × 101 | 2.10 × 10−1 | 5.04 × 10−84 | |
| F3 | Max | 5.36 × 102 | 5.26 × 100 | 3.16 × 104 | 1.03 × 102 | 4.52 × 104 | 4.83 × 104 | 1.01 × 10−180 |
| Min | 2.45 × 102 | 3.78 × 10−2 | 4.76 × 103 | 2.36 × 100 | 1.47 × 104 | 3.31 × 104 | 1.34 × 10−182 | |
| Mean | 3.48 × 102 | 1.63 × 100 | 1.70 × 104 | 3.51 × 101 | 2.50 × 104 | 4.28 × 104 | 2.42 × 10−181 | |
| Std | 1.02 × 102 | 1.68 × 100 | 7.81 × 103 | 3.39 × 101 | 9.84 × 103 | 4.83 × 103 | 0.00 | |
| F4 | Max | 2.75 × 100 | 5.87 × 10−2 | 6.53 × 101 | 8.65 × 10−1 | 8.06 × 101 | 4.08 × 101 | 8.75 × 10−97 |
| Min | 1.88 × 100 | 5.03 × 10−3 | 2.88 × 101 | 1.11 × 10−1 | 5.16 × 101 | 3.49 × 101 | 2.56 × 10−97 | |
| Mean | 2.10 × 100 | 1.80 × 10−2 | 5.27 × 101 | 3.37 × 10−1 | 6.50 × 101 | 3.79 × 101 | 5.05 × 10−97 | |
| Std | 2.58 × 10−1 | 1.77 × 10−2 | 1.32 × 101 | 2.68 × 10−1 | 9.07 × 100 | 1.98 × 100 | 2.11 × 10−97 | |
| F5 | Max | 5.11 × 102 | 2.88 × 101 | 1.38 × 107 | 2.86 × 101 | 1.20 × 106 | 1.05 × 104 | 2.24 × 101 |
| Min | 6.75 × 101 | 2.62 × 101 | 5.75 × 104 | 2.61 × 101 | 1.02 × 105 | 3.57 × 103 | 1.00 × 101 | |
| Mean | 1.86 × 102 | 2.76 × 101 | 2.86 × 106 | 2.75 × 101 | 5.73 × 105 | 6.52 × 103 | 1.67 × 101 | |
| Std | 1.33 × 102 | 9.23 × 10−1 | 4.50 × 106 | 8.08 × 10−1 | 3.68 × 105 | 2.24 × 103 | 4.11 × 100 | |
| F6 | Max | 7.95 × 100 | 2.33 × 10−10 | 1.47 × 102 | 7.43 × 10−6 | 1.95 × 103 | 6.83 × 100 | 1.30 × 10−188 |
| Min | 5.82 × 10−1 | 9.51 × 10−12 | 3.23 × 100 | 1.64 × 10−8 | 8.74 × 101 | 3.47 × 100 | 1.22 × 10−189 | |
| Mean | 1.77 × 100 | 7.16 × 10−11 | 5.54 × 101 | 1.17 × 10−6 | 6.96 × 102 | 4.72 × 100 | 6.08 × 10−189 | |
| Std | 2.19 × 100 | 6.86 × 10−11 | 4.91 × 101 | 2.26 × 10−6 | 5.81 × 102 | 9.98 × 10−1 | 0.00 | |
| F7 | Max | 4.26 × 104 | 8.55 × 10−7 | 3.90 × 105 | 1.15 × 10−2 | 1.54 × 108 | 8.14 × 104 | 3.81 × 10−166 |
| Min | 1.16 × 103 | 1.80 × 10−7 | 4.57 × 103 | 6.78 × 10−4 | 1.42 × 106 | 3.80 × 1044 | 1.25 × 10−167 | |
| Mean | 7.97 × 103 | 5.56 × 10−7 | 1.09 × 105 | 4.09 × 10−3 | 2.93 × 107 | 6.39 × 104 | 1.49 × 10−166 | |
| Std | 1.26 × 104 | 2.28 × 10−7 | 1.11 × 105 | 3.72 × 10−3 | 4.52 × 107 | 1.56 × 104 | 0.00 | |
| F8 | Max | 1.66 × 100 | 4.62 × 10−6 | 2.04 × 101 | 2.04 × 101 | 1.99 × 101 | 3.75 × 100 | 7.99 × 10−15 |
| Min | 1.75 × 10−1 | 1.57 × 10−6 | 3.45 × 100 | 4.58 × 10−5 | 7.53 × 100 | 2.95 × 100 | 4.44 × 10−15 | |
| Mean | 1.12 × 100 | 3.36 × 10−6 | 1.34 × 101 | 6.07 × 100 | 1.50 × 101 | 3.38 × 100 | 6.57 × 10−15 | |
| Std | 4.63 × 10−1 | 1.03 × 10−6 | 7.40 × 100 | 9.78 × 100 | 5.24 × 100 | 2.46 × 10−1 | 1.83 × 10−15 | |
| F9 | Max | 4.96 × 10−2 | 7.78 × 10−2 | 2.06 × 100 | 2.77 × 10−2 | 1.55 × 100 | 9.73 × 10−1 | 0.00 |
| Min | 5.88 × 10−3 | 2.21 × 10−12 | 8.26 × 10−1 | 3.56 × 10−8 | 1.11 × 100 | 7.73 × 10−1 | 0.00 | |
| Mean | 1.94 × 10−2 | 1.08 × 10−2 | 1.13 × 100 | 9.18 × 10−3 | 1.29 × 100 | 8.71 × 10−1 | 0.00 | |
| Std | 1.22 × 10−2 | 2.44 × 10−2 | 3.65 × 10−1 | 1.06 × 10−2 | 1.21 × 10−1 | 6.18 × 10−2 | 0.00 | |
| F10 | Max | 1.63 × 102 | 3.02 × 101 | 1.61 × 102 | 4.41 × 101 | 2.55 × 102 | 1.44 × 102 | 0.00 |
| Min | 6.25 × 101 | 6.38 × 100 | 2.92 × 101 | 8.63 × 100 | 1.17 × 102 | 1.22 × 102 | 0.00 | |
| Mean | 9.41 × 101 | 1.60 × 101 | 6.56 × 101 | 2.09 × 101 | 1.76 × 102 | 1.32 × 102 | 0.00 | |
| Std | 3.17 × 101 | 7.64 × 100 | 3.79 × 101 | 1.14 × 101 | 4.04 × 101 | 7.99 × 100 | 0.00 | |
| F11 | Max | 2.76 × 100 | 5.67 × 10−3 | 1.18 × 101 | 2.36 × 100 | 1.63 × 101 | 9.46 × 100 | 2.54 × 10−2 |
| Min | 6.25 × 10−1 | 2.34 × 10−3 | 3.03 × 10−1 | 2.40 × 10−3 | 4.10 × 100 | 6.46 × 100 | 7.47 × 10−69 | |
| Mean | 1.55 × 100 | 3.58 × 10−3 | 4.85 × 100 | 5.15 × 10−1 | 9.40 × 100 | 7.99 × 100 | 2.54 × 10−3 | |
| Std | 7.38 × 10−1 | 1.11 × 10−3 | 4.44 × 100 | 7.79 × 10−1 | 4.08 × 100 | 1.09 × 100 | 8.03 × 10−3 | |
| F12 | Max | −4.61 × 102 | −5.78 × 102 | −4.86 × 102 | −7.67 × 102 | −9.95 × 102 | −1.04 × 103 | −1.06 × 103 |
| Min | −9.78 × 102 | −7.16 × 102 | −5.88 × 102 | −8.71 × 102 | −1.06 × 103 | −1.06 × 103 | −1.06 × 103 | |
| Mean | −6.96 × 102 | −6.39 × 102 | −5.29 × 102 | −8.24 × 102 | −1.05 × 103 | −1.06 × 103 | −1.06 × 103 | |
| Std | 1.39 × 102 | 4.53 × 101 | 3.40 × 101 | 3.36 × 101 | 2.14 × 101 | 7.94 × 100 | 2.40 × 10−13 | |
| Motor Speed | Fault Position | Number of Total Samples | Number of Training Samples | Number of Testing Samples | Label |
|---|---|---|---|---|---|
| 1800 rpm | Normal | 61 | 40 | 21 | L1 |
| Inner race | 61 | 40 | 21 | L2 | |
| Outer race | 61 | 40 | 21 | L3 | |
| Ball fault | 61 | 40 | 21 | L4 | |
| Combination fault | 61 | 40 | 21 | L5 | |
| 2200 rpm | Normal | 61 | 40 | 21 | L6 |
| Inner race | 61 | 40 | 21 | L7 | |
| Outer race | 61 | 40 | 21 | L8 | |
| Ball fault | 61 | 40 | 21 | L9 | |
| Combination fault | 61 | 40 | 21 | L10 |
| Parameter | m | c | ||
| Value | 20 | 4 | 6 | 1 |
| Abbreviation | Expression |
|---|---|
| ACC | |
| ARI | |
| F | |
| NMI |
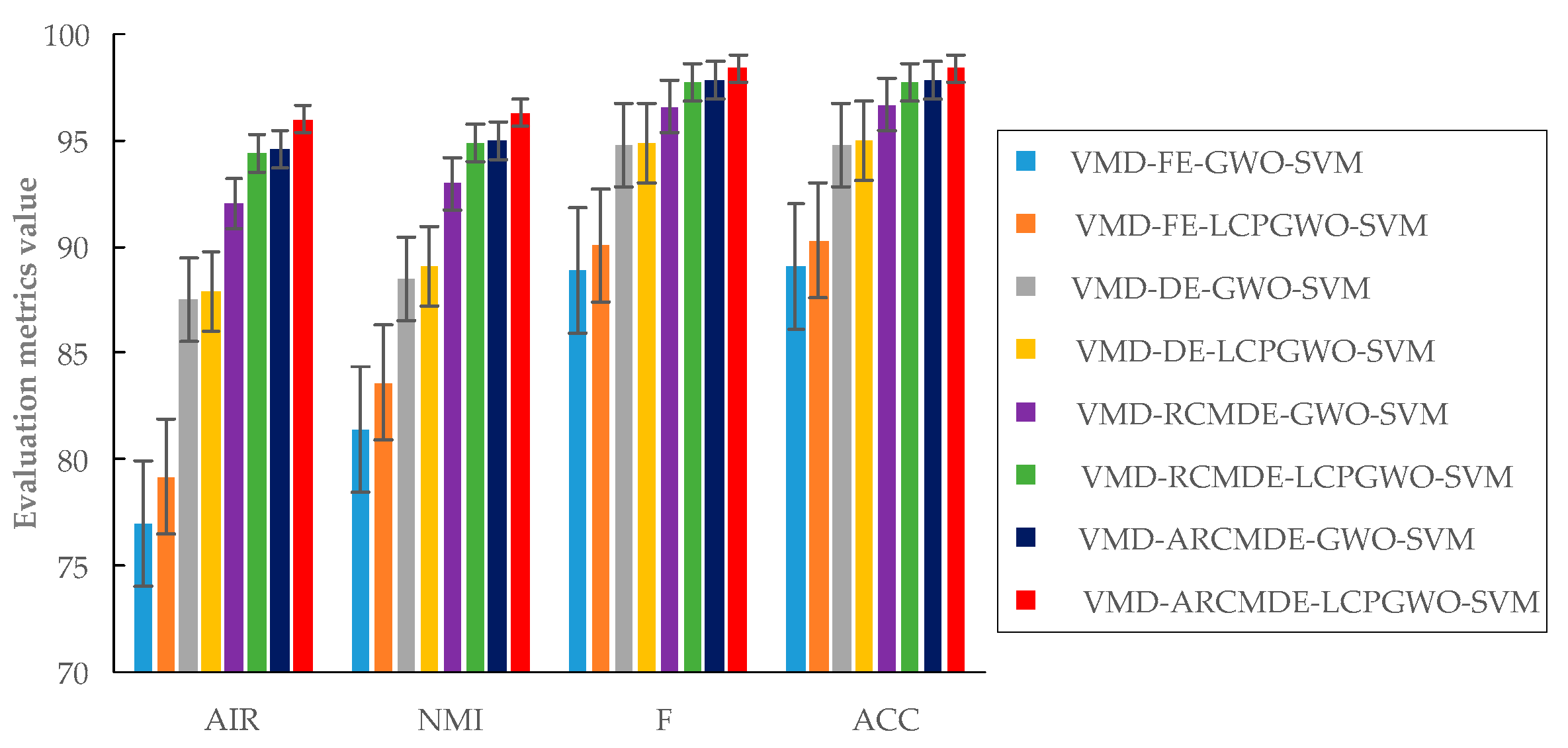
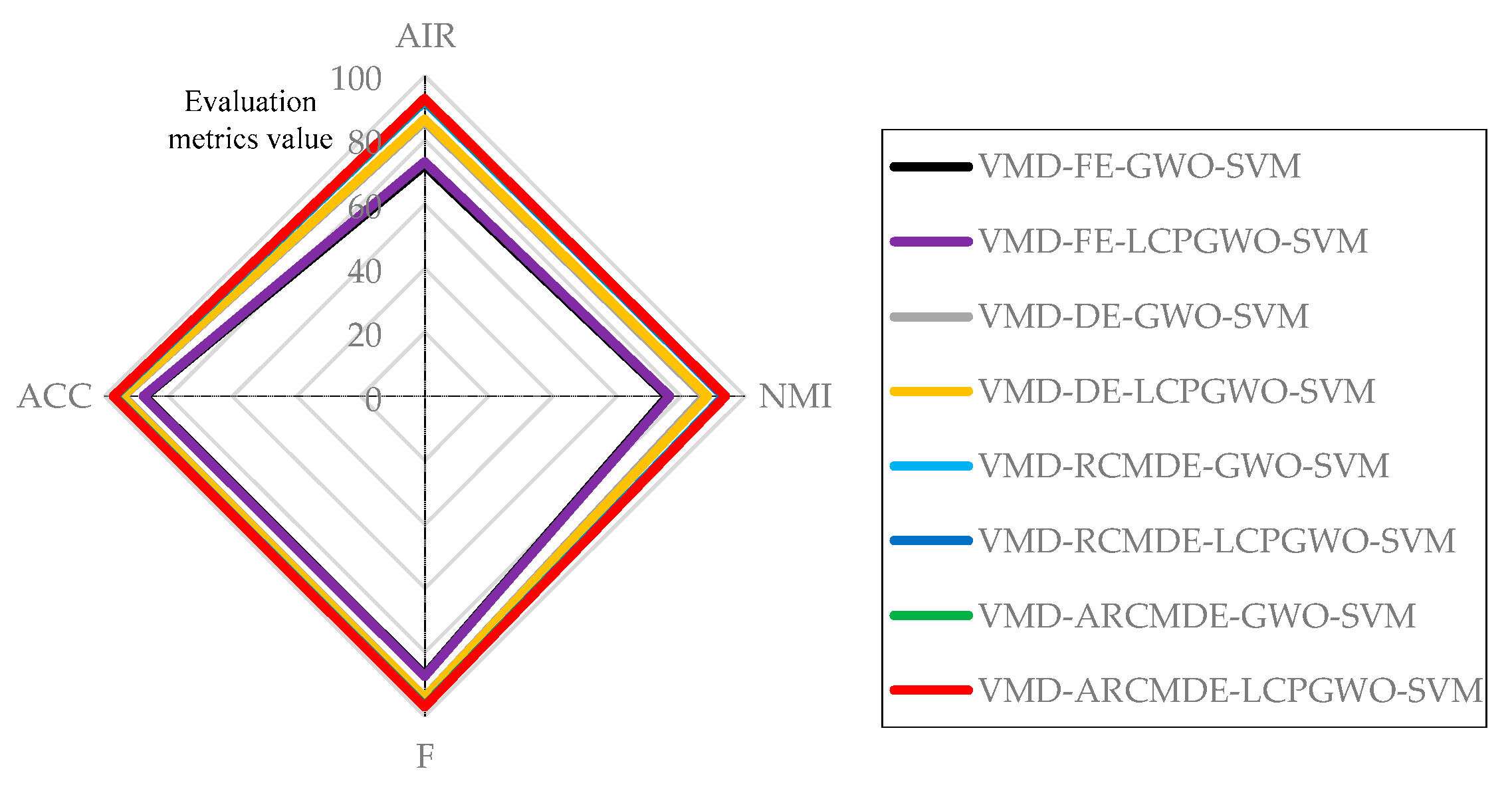
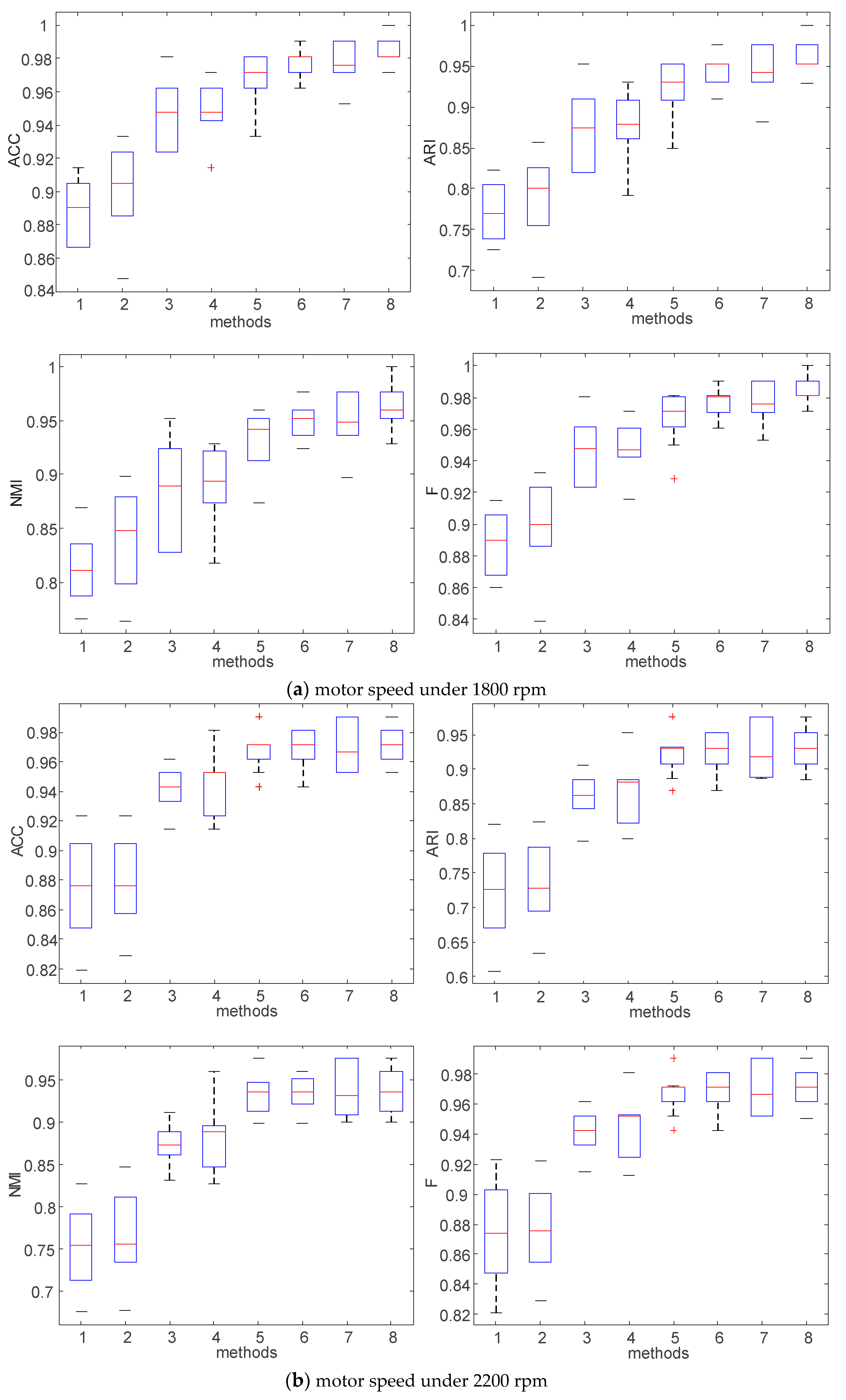
| Motor Speed | Methods | Best C | Best g | Evaluation Metrics | |||
|---|---|---|---|---|---|---|---|
| ARI | NMI | F | ACC | ||||
| 1800 rpm | VMD-FE-GWO-SVM | 334.3608 | 13.2605 | 0.7697 [−0.0439, 0.0532] | 0.8142 [−0.0477, 0.0545] | 0.8885 [−0.0286, 0.0264] | 0.8905 [−0.0238, 0.0238] |
| VMD-FE-LCPGWO-SVM | 14.792 | 5.8259 | 0.7919 [−0.1008, 0.0650] | 0.8360 [−0.0202, 0.0620] | 0.9004 [−0.06130, 0.0320] | 0.9029 [−0.0553, 0.0304] | |
| VMD-DE-GWO-SVM | 2.3934 | 21.5967 | 0.8748 [−0.0544, 0.0775] | 0.8845 [−0.0568, 0.0678] | 0.9473 [−0.0240, 0.0334] | 0.9476 [−0.0238, 0.0340] | |
| VMD-DE-LCPGWO-SVM | 166.1041 | 38.8857 | 0.8791 [−0.0868, 0.0508] | 0.8906 [−0.0732, 0.0382] | 0.9490 [−0.0335, 0.0222] | 0.9495 [−0.0352, 0.0219] | |
| VMD-RCMDE-GWO-SVM | 445.5278 | 0.0353 | 0.9202 [−0.0716, 0.0327] | 0.9298 [−0.0563, 0.0305] | 0.9658 [−0.0371, 0.0151] | 0.9667 [−0.0334, 0.0143] | |
| VMD-RCMDE-LCPGWO-SVM | 708.8285 | 0.2694 | 0.9439 [−0.0348, 0.0319] | 0.9488 [−0.0246, 0.0273] | 0.9769 [−0.0159, 0.0136] | 0.9771 [−0.0152, 0.0134] | |
| VMD-ARCMDE-GWO-SVM | 683.77 | 0.25 | 0.9458 [−0.0639, 0.0300] | 0.9500 [−0.0533, 0.0261] | 0.9780 [−0.0248, 0.0125] | 0.9781 [−0.0257, 0.0124] | |
| VMD-ARCMDE-LCPGWO-SVM | 5.6124 | 0.2451 | 0.9597 [−0.0310, 0.0403] | 0.9627 [−0.0342, 0.0373] | 0.9838 [−0.0124, 0.0162] | 0.9838 [−0.0124, 0.0162] | |
| 2200 rpm | VMD-FE-GWO-SVM | 43.6013 | 0.4489 | 0.7216 [−0.1137,0.0993] | 0.7573 [−0.0814,0.0705] | 0.8725 [−0.0512,0.0509] | 0.8733 [−0.0543,0.0505] |
| VMD-FE-LCPGWO-SVM | 72.1392 | 0.8806 | 0.7327 [−0.0991,0.0919] | 0.7640 [−0.0868,0.0831] | 0.8761 [−0.0472,0.0458] | 0.8781 [−0.0495,0.0457] | |
| VMD-DE-GWO-SVM | 20.573 | 27.4512 | 0.8604 [−0.0651, 0.0447] | 0.8732 [−0.0410, 0.0392] | 0.9417 [−0.0263, 0.0202] | 0.9419 [−0.0276, 0.0200] | |
| VMD-DE-LCPGWO-SVM | 5.5 | 69.6902 | 0.8652 [−0.0663, 0.0877] | 0.8815 [−0.0544, 0.0788] | 0.9439 [−0.0316, 0.0370] | 0.9438 [−0.0295, 0.0371] | |
| VMD-RCMDE-GWO-SVM | 653.1094 | 0.4638 | 0.9220 [−0.0535, 0.0538] | 0.9330 [−0.0346, 0.0430] | 0.9675 [−0.0249, 0.0230] | 0.9676 [−0.0248, 0.0229] | |
| VMD-RCMDE-LCPGWO-SVM | 408.9463 | 0.2012 | 0.9242 [−0.0557, 0.0287] | 0.9337 [−0.0352, 0.0267] | 0.9684 [−0.0258, 0.0125] | 0.9686 [−0.0257, 0.0124] | |
| VMD-ARCMDE-GWO-SVM | 767.9240 | 0.0013 | 0.9271 [−0.0401, 0.0487] | 0.9385 [−0.0377, 0.0376] | 0.9693 [−0.0176, 0.0212] | 0.9695 [−0.0171, 0.0210] | |
| VMD-ARCMDE-LCPGWO-SVM | 172.4596 | 0.0185 | 0.9303 [−0.0461, 0.0455] | 0.9381 [−0.0380, 0.0380] | 0.9712 [−0.0207, 0.0193] | 0.9714 [−0.0190, 0.0191] | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, H.; Fu, W.; Li, B.; Shao, K.; Yang, D. Intelligent Fault Identification for Rolling Bearings Fusing Average Refined Composite Multiscale Dispersion Entropy-Assisted Feature Extraction and SVM with Multi-Strategy Enhanced Swarm Optimization. Entropy 2021, 23, 527. https://doi.org/10.3390/e23050527
Shi H, Fu W, Li B, Shao K, Yang D. Intelligent Fault Identification for Rolling Bearings Fusing Average Refined Composite Multiscale Dispersion Entropy-Assisted Feature Extraction and SVM with Multi-Strategy Enhanced Swarm Optimization. Entropy. 2021; 23(5):527. https://doi.org/10.3390/e23050527
Chicago/Turabian StyleShi, Huibin, Wenlong Fu, Bailin Li, Kaixuan Shao, and Duanhao Yang. 2021. "Intelligent Fault Identification for Rolling Bearings Fusing Average Refined Composite Multiscale Dispersion Entropy-Assisted Feature Extraction and SVM with Multi-Strategy Enhanced Swarm Optimization" Entropy 23, no. 5: 527. https://doi.org/10.3390/e23050527