
Abstract
This paper proposes and studies three methods for the identification of cracks in linear elastic bodies. They are based on the reciprocity gap principle which they extend to the case of partially redundant boundary data. The methods are all assessed on an academic 2D case, then the most appealing is more deeply analysed and illustrated on a 3D test-case.




























Similar content being viewed by others

References
Alessandrini G, Rondi L, Rosset E, Vessella S (2009) The stability for the Cauchy problem for elliptic equations. Inverse Probl 25(12):123004
Amstutz S, Horchani I, Masmoudi M (2005) Crack detection by the topological gradient method. Control Cybern 34(1):81–101
Andrieux S (2015) The reciprocity likelihood maximization: a variational approach of the reciprocity gap method. J Mech Mater Struct 10(3):219–237
Andrieux S, Baranger T (2012) Emerging crack front identification from tangential surface displacements. Comptes Rendus Mécanique 340(8):565–574
Andrieux S, Baranger T, Ben Abda A (2006) Solving Cauchy problems by minimizing an energy-like functional. Inverse Probl 22(1):115
Andrieux S, Ben Abda A (1993) The reciprocity gap: a general concept for flaws identification problems. Mech Res Commun 20(5):415–420
Andrieux S, Ben Abda A, Bui HD (1999) Reciprocity principle and crack identification. Inverse Probl 15(1):59
Andrieux S, Ben Abda A, Jaoua M (1998) On the inverse emergent plane crack problem. Math Methods Appl Sci 21(10):895–906
Avril S, Bonnet M, Bretelle A-S, Grediac M, Hild F, Ienny P, Latourte F, Lemosse D, Pagano S, Pagnacco E et al (2008) Overview of identification methods of mechanical parameters based on full-field measurements. Exp Mech 48(4):381
Ben Abda A, Ameur HB, Jaoua M (1999) Identification of 2D cracks by elastic boundary measurements. Inverse Probl 15(1):67
Ben Abda A, Delbary F, Haddar H (2005) On the use of the reciprocity-gap functional in inverse scattering from planar cracks. Math Models Methods Appl Sci 15(10):1553–1574
Ben Abda A, Kallel M, Leblond J, Marmorat J-P (2002) Line segment crack recovery from incomplete boundary data. Inverse Probl 18(4):1057
Ben Belgacem F (2007) Why is the Cauchy problem severely ill-posed? Inverse Probl 23(2):823–836
Ben Belgacem F, El Fekih H (2005) On Cauchy’s problem: I. A variational Steklov-Poincaré theory. Inverse Problems 21(6):1915
Cakoni F, Colton D (2003) The linear sampling method for cracks. Inverse Probl 19(2):279
Cimetiere A, Delvare F, Jaoua M, Pons F (2001) Solution of the Cauchy problem using iterated Tikhonov regularization. Inverse Probl 17(3):553–570
Ern A, Guermond J-L (2013) Theory and practice of finite elements, volume 159. Springer Science & Business Media
Ferrier R, Kadri ML, Gosselet P (2018) The Steklov-Poincaré technique for data completion: preconditioning and filtering. Int J Numer Methods Eng 116(4):270–286
Ferrier R, Kadri ML, Gosselet P (2019) Planar crack identification in 3D linear elasticity by the Reciprocity Gap method. Comput Methods Appl Mech Eng 355:193–215
Geuzaine C, Remacle J-F (2009) Gmsh: a 3-D finite element mesh generator with built-in pre-and post-processing facilities. Int J Numer Methods Eng 79(11):1309–1331
Kadri ML, Ben Abdallah J, Baranger T (2011) Identification of internal cracks in a three-dimensional solid body via Steklov-Poincaré approaches. Comptes Rendus Mécanique 339(10):674–681
Kozlov VA, Maz’ya VG (1989) Iterative procedures for solving ill-posed boundary value problems that preserve the differential equations. Algebra i Analiz 1(5):144–170
O’Leary DP (1980) The block conjugate gradient algorithm and related methods. Linear algebra and its applications 29:293–322
Santosa F, Vogelius M (1991) A computational algorithm to determine cracks from electrostatic boundary measurements. Int J Eng Sci 29(8):917–937
Shifrin E, Shushpannikov P (2013) Identification of small well-separated defects in an isotropic elastic body using boundary measurements. Int J Solids Struct 50(22):3707–3716
Shifrin EI, Kaptsov AV (2017) Identification of multiple cracks in 2D elasticity by means of the reciprocity principle and cluster analysis. Inverse Probl 34(1):015009
Steinhorst P, Kaltenbacher B (2013) Application of the reciprocity principle for the determination of planar cracks in piezoelectric material. In Advanced finite element methods and applications, pp 325–353. Springer
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
A Brief study of the Petrov-Galerkin formulation
A Brief study of the Petrov-Galerkin formulation
This “Appendix” aims at providing some theoretical ground to the formulation used in Sects. 4 and 5. For simplicity reasons, we focus on the case of identifying a crack with fully known boundary conditions. The extra terms needed for more general cases do not change the main properties of the system.
We recall that the system to be solved takes the form (for simplicity reason, we drop the subscript r, and the bracket notations for the displacement jump):
with
In the formulation, we make use of the duality bracket in the Hilbert space \(H^{1/2}_{00}\). \({\mathcal {V}}\) is a closed subspace of \(H^{1}(\varOmega )\), it inherits its Hilbert space structure. Fields in \({\mathcal {V}}\) have enough regularity for the trace and normal flux to be well-defined and continuous on the boundary and on \(\omega \), so that all operations are well posed and the (bi)linear forms are continuous. In practice, we use polynomial approximation in \({\mathcal {V}}\) and Lagrange finite element in \(H^{1/2}_{00}\), granting sufficient regularity to replace the duality bracket by a classical integral on \(\omega \).
Formulation (30) makes use of different search (\(H^{1/2}_{00}\)) and test (\({\mathcal {V}}\)) spaces, which is the playground of the Banach-Necas-Babǔska theorem [17], also known as inf-sup theorem.
One first precaution must be taken. For a given plane surface \(\omega \), we can define \({\mathcal {V}}_\omega \), the space of the \({\underline{v}}\) such that \(\underline{{\underline{\sigma }}}({\underline{v}})\cdot {\underline{n}}|_{\omega } = 0\). Let us define \({\underline{v}}\in {\mathcal {V}}_\omega ^\perp \), the subspace of \({\mathcal {V}}\) that is orthogonal to \({\mathcal {V}}_\omega \). \({\mathcal {V}}_\omega \) is a closed space, which means in particular that it is not dense in \({\mathcal {V}}\), and ensures that \({\underline{v}}\in {\mathcal {V}}_\omega ^\perp \) is not empty. In order to avoid inconsistency, the formulation must be studied with \({\underline{v}}\in {\mathcal {V}}_\omega ^\perp \).
For the formulation to be stable, the following quantity should be bounded from below by a positive number:
Unfortunately, this is not possible. Indeed, we have the following property:
and more precisely, for a given \({\underline{u}}\in H^{1/2}_{00}\), the \({\underline{\tau }}\) which realizes the upper bound is the image of \({\underline{u}}\) by Riesz’ isomorphism which we note \({\underline{\tau }}_{{\underline{u}}}\). The problem is then to find \({\underline{v}}\in {\mathcal {V}}\) such that \(\underline{{\underline{\sigma }}}({\underline{v}})\cdot {\underline{n}}= {\underline{\tau }}_{{\underline{u}}}\); this is the subject of Proposition 2. Unfortunately, its proof appeals to a Cauchy problem, which is unstable. Thus we can not control \(\Vert {\underline{v}}\Vert _{{\mathcal {V}}}\) from above with \(\Vert {\underline{\tau }}_{{\underline{u}}}\Vert _{H^{-1/2}}=\Vert {\underline{u}}\Vert _{H^{1/2}_{00}}\).
In the end, the lack of stability is caused by fields \({\underline{u}}\in H^{1/2}_{00}(\omega )\) aligned with high energy test fields \({\underline{v}}\in {\mathcal {V}}_\omega ^\perp \). This justifies the use of gradient-based regularization.
Proposition 2
Let \(\omega \) be a surface that cuts the domain \(\varOmega \). For any \({\underline{\tau }}\in H^{-1/2}(\omega )\), there exists \({\underline{v}}\in {\mathcal {V}}_{\omega }^\perp \) such that \(\underline{{\underline{\sigma }}}({\underline{v}})\cdot {\underline{n}}_{\varPi }= {\underline{\tau }}\) on \(\omega \).
Proof
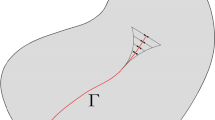
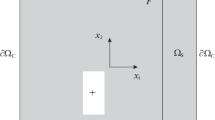
The surface \(\omega \) splits \(\varOmega \) into two open sets, denoted by \(\varOmega _1\) and \(\varOmega _2\) (Fig. 29). For any \({\underline{u}}_1\in H^{1/2}(\partial \varOmega _1)\), one can solve a direct problem on \(\varOmega _1\) in order to build \({\underline{v}}_1\in H^1(\varOmega _1)\) such that the equilibrium s verified and \(\underline{{\underline{\sigma }}}({\underline{v}}_1)\cdot {\underline{n}}_{\varPi }= {\underline{\tau }}\) on \(\omega \).

Splitting of the domain
\({\underline{v}}_1\) and \({\underline{\tau }}\) are compatible data for a Cauchy problem set on \(\varOmega _2\), and it is possible to build the field \({\underline{v}}_2\in H^1(\varOmega _2)\) such that the equilibrium is also verified and \(\underline{{\underline{\sigma }}}({\underline{v}}_2)\cdot {\underline{n}}_{\varPi }= {\underline{\tau }}\) on \(\omega \).
The traces on \(\omega \) of the fields \({\underline{v}}_1\) and \({\underline{v}}_2\) are the same, and consequently, the field \({\underline{v}}\), that is equal to \({\underline{v}}_1\) on \(\varOmega _1\) and \({\underline{v}}_2\) on \(\varOmega _2\), and that is extended by continuity on \(\omega \), is in \({\mathcal {V}}_{\omega }^\perp \) and is such that \(\underline{{\underline{\sigma }}}({\underline{v}})\cdot {\underline{n}}_{\varPi }= {\underline{\tau }}\) on \(\omega \). \(\square \)
Rights and permissions
About this article

Cite this article
Ferrier, R., Kadri, M. & Gosselet, P. Crack identification with incomplete boundary data in linear elasticity by the reciprocity gap method. Comput Mech 67, 1559–1579 (2021). https://doi.org/10.1007/s00466-021-02006-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00466-021-02006-4