
Abstract
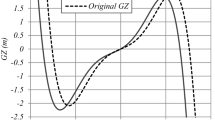
A methodology for predicting the probability density function of roll motion for irregular beam seas is developed in the author’s previous research. In this paper, two methods for the prediction of the probability density function (PDF) of the rolling amplitude are examined. One of these methods is an approach based on a non-Gaussian PDF with the use of the equivalent linearization and the moment method, which has been used by Maki in the field of naval architecture. In the framework of this method, the instantaneous joint PDF of the roll and roll rate can be calculated. Thereby, the transformation from the joint PDF to the PDF of the total energy H is necessary. In this paper, the transformation from the joint PDF of instantaneous roll and rate to the PDF of H was conducted. The other method is the energy-based stochastic averaging method, whereby the PDF of the total energy H is determined from which the roll amplitude is calculated. It is noteworthy that the proposed theory aims to predict the PDF of the amplitude of the vessel due to wind or flooding. For such conditions, the restoring curve (GZ curve) has asymmetricity. To take into account this asymmetricity, a new theory for the transform of the PDF of the total energy H to the PDFof amplitude is proposed. The obtained theoretical results show almost complete agreement, and both of the two theoretical methods i.e., the energy-based stochastic averaging method and the non-Gaussian PDF method with the use of the equivalent linearization and moment method, show equivalent prediction performance even in the asymmetric condition.











Similar content being viewed by others

References
Dalzell JF (1973) A note on the distribution of maxima of ship rolling. J Ship Res 17(4):217–226
Haddara MR (1974) A modified approach for the application of Fokker–plank equation to the nonlinear ship motion in random waves. Int Shipbuild Prog 21(242):283–288
Roberts JB (1982) A stochastic theory for nonlinear ship rolling in irregular seas. J Ship Res 26(4):229–245
Caughey TK (1963) Derivation and application of the Fokker-Planck equation to discrete nonlinear dynamic systems subjected to white noise random excitation. J Acoust Soc Am 35(2):1683–1692
Roberts JB, Spanos PD (1990) Random vibration and statistical linearization. Wiley
To CWS (2017) Nonlinear random vibration: analytical techniques and applications, 2nd edn. CRC Press, p 2017
Cai GQ (2016) Elements of stochastic dynamics. World Scientific
Francescutto A, Naito S (2004) Large amplitude rolling in a realistic sea. Int Shipbuilding Prog 51(23):221–235
Su Z, Falzarano JM (2011) Gaussian and non-Gaussian cumulant neglect application to large amplitude rolling in random waves. Int Shipbuild Prog 58:97–113
Belenky VL, Glozter D, Pipiras V, Sapsis TP (2019) Distribution tail structure and extreme value analysis of constrained piecewise linear oscillators. Probab Eng Mech 57:1–13
Anastopoulos PA, Spyrou KJ (2019) Can the generalized pareto distribution be useful towards developing ship stability criteria? Internat Ship Stability Workshop 2:19
Dostal L, Kreuzer E, Namachchivaya NS (2012) Non-standard stochastic averaging of large-amplitude ship rolling in random seas. Proc Royal Soc London Mathe Phys Eng Sci 468:4146–4173
Dostal L, Kreuzer E (2014) Assessment of extreme rolling of ships in random seas. In: ASME 2014 33rd international conference on ocean, offshore and arctic engineering. American Society of Mechanical Engineers, p. V007T12A-VT12A.
Dostal L, Kreuzer E (2016) Analytical and semi-analytical solutions of some fundamental nonlinear stochastic differential equations. Proc IUTAM 19:178–186
Maki A (2017) Estimation method of the capsizing probability in irregular beam seas using non-gaussian probability density function. J Mar Sci Technol 22(2):351–360
Maki A, Sakai M, Umeda N (2019) Estimating a non-Gaussian probability density of the rolling motion in irregular beam seas. J Marine Sci Technol 2:78–23
Stratonovich RL (1963) Topics in the theory of random noise, vol I. Gordon and Breach
Zhu WQ, Cai GQ (2011) Random vibration of viscoelastic system under broad-band excitations. Int J Non-Linear Mech 46:720–726
Chai W, Dostal L, Naess A, Leira JB (2018) A comparative study of the stochastic averaging method and the path integration method for nonlinear ship roll motion in random beam seas. J Mar Sci Technol 23(4):854–865
Kimura K, Takahara H, Yamamoto S (2000) Estimation of non-gaussian response distribution of a system with nonlinear damping, Proceedings (CD-ROM), Dynamic and Design Conference 2000, Japan Society of Mechanical Engineers.
Kimura K, Komada M, Sakata M (1995) Non-Gaussian equivalent linearization for estimation of stochastic response distribution of nonlinear systems (in Japanese). Trans Jpn Soc Mech Eng C 61(583):831–835
Kimura K, Morimoto T (1998) Estimation of non-gaussian response distribution of a nonlinear system subjected to random excitation (Application to Nonwhite Excitation with Nonrational Spectrum (In Japanese). J Japn Soc Mech Eng 64(617):1–6
Sakata K, Kimura K (1979) The use of moment equations for calculating the mean square response of a linear system to non-stationary random excitation. J Sound Vib 67(3):383–393
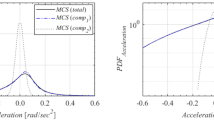
Maki A, Dostal L, Maruyama Y, Minoura M, Sakai M, Sugimoto K, Fukumoto Y, Umeda N (2020) Theoretical estimation of roll acceleration in beam seas with use of PDF line integral method. J Marine Sci Technol 7:12–45
Maruyama Y, Maki A, Dostal L, Umeda N (2020) Improved stochastic averaging of hamiltonian for parametric rolling in irregular head or following seas. J Marine Sci Technol 7:120–124
Tsumoto K, Ueta T, Yoshinaga T, Kawakami H (2012) Bifurcation analyses of nonlinear dynamical systems: from theory to numerical computations. Nonlinear Theory Appl IEICE 3(4):458–476
Acknowledgements
The author is grateful to Dr. Munehiko Minoura at Osaka University and Prof. Toru Katayama at Osaka Prefecture University for their technical advice and discussions. This work was supported by a Grant-in-Aid for Scientific Research from the Japan Society for Promotion of Science (JSPS KAKENHI Grant Number 19H02360). A part of the research was conducted as collaborative research with ClassNK. Further, this work was partly supported by JASNAOE collaborative research program/financial support.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
The numerical calculation of drift and diffusion is shown below.
Dostal has proposed the analytical expressions of these integrals for the system having cubic restoring term. However, for a general restoring case, we need to rely on numerical computation since the analytical form of the solution cannot be necessarily obtained. From this point of view, we need to consider an accurate numerical integration method. The numerical calculation of drift is not straightforward in Eq. 38 since there is a singularity in the integration with respect to time t. This singularity looks very simple, but to keep a high numerical accuracy and save computational costs, a suitable integration scheme has to be used. Of course, the biggest problem appears at \(\dot{\phi }_{\,H} = 0\). This singularity is very easy to avoid as follows. First, in the vicinity of the singular point, \(\dot{\phi }_{\,H}\) is approximated as
It is assumed that \(\dot{\phi }_{\,H} \left( t \right) = 0\) at time zero, which can be easily established by shifting the coordinate system. Then, we consider the numerical integration scheme of the following part:
which is included in the drift. Apparently, it has a singularity at t equals zero. However, this singularity can be easily excluded as follows. In the vicinity of the singular point, the integration to be evaluated becomes as follows:
Notice that \(\tau\) is constant here, and \(\dot{\phi }_{\,H} \left( t \right) = 0\) is satisfied. Now, we introduce some new coefficients for simplicity.
Then, we get
Notice, that even in the case of \(\alpha < 0 < \beta\), the following relation is definitely fulfilled since the negative and positive singular values cancel.
Therefore, the calculation of the singular term can be completed.
On the other hand, in the wider region around the singular points, the numerical behavior is not suitable for computation. For instance, we should not directly approximate the integrand as follows:
This kind of approximation of the integrand could deteriorate the numerical accuracy. Therefore, again, we separately introduce the polynomial approximation for both, the denominator and the numerator of the integrand as
Since there is not a singularity in the region which we are considering now, this numerical integration can be calculated as follows:
Notice that the square root included in the above expression becomes imaginary in general, and the inside of the arctangent function becomes also imaginary. Therefore, in programming, this point should be taken into account. However, in the outer region of the singular point, the above approximate integration method should be applied. Please see the literature [25] for further numerical techniques.
Furthermore, to save computational time, the discretized trajectory and period \(T\left( H \right)\) of the Hamiltonian system should be obtained before carrying out the numerical integration. Here, to retain numerical accuracy, the Newton method is applied for the determination of the discretized trajectory and period \(T\left( H \right)\) e.g., [26]. Thereby, the unknown variable is \(T\left( H \right)\). Now, the equation of motion of the Hamiltonian system is as follows:
where
Here, we introduce the non-dimensional time \(\tilde{t}\) as
Then, the period of this system becomes one.
The solution trajectory of this system in the time domain is defined as
Thereby, \({\mathbf{x}}_{0}\) is the initial condition. We define the Poincare map as
where, n is an arbitrary integer. The condition of the periodic solution is
Therefore, the above condition should be solved with the Newton method. Again, the unknown value to be obtained is \(T\left( H \right)\).
About this article

Cite this article
Maki, A., Dostal, L., Maruyama, Y. et al. Theoretical determination of asymmetric rolling amplitude in irregular beam seas. J Mar Sci Technol 27, 40–51 (2022). https://doi.org/10.1007/s00773-021-00810-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00773-021-00810-4