
Abstract
Dry granular flows provide an ongoing challenge to physics and under saturation the multiphase physics is even more difficult to disentangle. A rich literature has elucidated the possible regimes achieved, however, the nonlinear nature of the multiphase process makes predicting the appropriate dynamic regime difficult. In this study, we introduce a new experimental strategy to identify the appropriate dynamical regimes by combining traditional methods with acoustic emission measurements. We sheared natural granular materials under dry, water and oil-saturated conditions while recording mechanical, acoustic and visual data. By applying alternate low and high velocity steps we respectively obtained quasi-static and inertial granular flow regimes. Dilation was observed for all high-velocity flows but its amount varied as did the degree of acoustic emission. At high velocities, the water-saturated flow dilated less and had reduced acoustic emissions relative to the dry case. In contrast, the oil-saturated flow dilated more while having even less acoustic emissions. This difference in trends of the dilation and acoustic emissions with increasing fluid viscosity suggests that oil and water granular flows achieved distinct dynamical regimes. Damping of granular pressure by reducing grain collisions and Dilatancy due to fully lubricated contacts are two competing processes influence the saturated shear physics and theoretically expected, but distinguishing between the regimes is difficult to anticipate. The acoustic emissions provide an extra piece of information that allows us to distinguish the physical regimes and determine the competition between processes that control the physics of saturated granular flows in the granular inertial regime.
Similar content being viewed by others

1 Introduction
Saturated granular flows are ubiquitous in natural processes, and despite their importance, their complex physics is not well understood. Theoretical analysis and macroscopic observations suggest that the rheology is governed by a competition between grain collisions, lubrication pressure and frictional interactions, but determining which process is governing in a particular flow is complicated. The problem is particularly difficult because certain geometries and combinations will result in identical macroscopic observables. Additional methods are necessary to access the microscopic physics. For example, saturated granular flows under shear can dilate for multiple reasons. Since the pioneering work of Bagnold, grain collisions have been recognized as a dilatational mechanism for rapid flows [1]. Like in molecular gases, collisions result in a dispersive pressure that reduces the grain packing. Initially, these granular pressures were thought to only play a role in dilute granular flows, but recent numerical and experimental evidence have shown that they are also important in dense flows with weaker collisions [2,3,4]. Extant experiments suggests that collisional stresses can exist at high speeds in the presence of water, but the fluid modification of the behavior is incompletely understood [5]. In addition, viscous fluids are sheared in the narrow channels between particles can also contribute to dilation by creating a lubrication pressure [2, 6, 7]. This pressure pushes apart particles and results in dilation that increases with shear rate and macroscopically is indistinguishable from that produced due to granular pressure. The question we are posing here is whether an experimental method can be developed that accesses the differences in microscopic physics between these two cases.
Theory provides some guidance on expected flow regimes. Non-dimensional parameters based on linearizing the governing equations delineate anticipated dynamical regimes [8,9,10,11]. The approach is powerful and forms the foundation of fluid dynamics. However, in the presence of non-linear feedbacks, the linear approach used to derive non-dimensional numbers makes a priori predictions of regimes more challenging. Macroscopic predictions can be tested, but delving inside a flow and determining the physics of phase interactions directly requires a method that accesses the particle scale interactions more directly. The problem is particularly acute for irregular grains, such as sand, where simplified models may miss important physics [12, 13].
In order to meet this need, we use acoustic emission (AE) measurements. Acoustic emission in natural environments is being used to study earthquakes, volcano eruptions, debris flows and landslides [14,15,16,17,18]. Indeed, acoustic measurements are commonly used for natural hazard detection but they may also be used to understand the microphysics of natural processes. While measuring dilatation of granular flows is relatively simple under controlled experimental conditions it is very challenging in natural settings. Combining the conventional dimensional analysis together with acoustic measurements may shed light on the micromechanics of granular flows both in the laboratory and nature.
Here we present a series of laboratory experiments on the relative dilatancy of oil, and water saturated compared to dry flows. We first outline the experiment and make predictions based on dimensionless number of the expected flow regimes. We then present actual laboratory data and demonstrate that the macroscopic behavior combined with the acoustic data show the expected competition of processes, and provides insight into the distinctive microscopic interactions of different flows. Thus, we conclude that the acoustic emissions approach elucidates differences in the regime boundaries that could not otherwise be accessed.
2 Experimental overview
We performed shear experiments on quartz sand from Cowell Beach, Santa Cruz, California. We exclude magnetic grains from the sand using Frantz Magnetic Separator and sieved to a diameter range of 300–417 µm. The sand is mostly composed of quartz (86%), feldspars (12%) and minor amount of calcite and other minerals [4]. The grains were rotationally sheared by a rheometer (TA Instrument, AR2000ex), under low normal load (1 N, equivalent normal stress of 1.6 kPa; Text S1 in the Online Resource) within ring-shape cell geometry (36 mm outer and 22 mm inner diameters; Fig. 1). We applied a constant normal stress boundary condition and measured (1 Hz) the change in shear stress (torque) and volume (compaction/dilatancy) under controlled shear velocities (10–1 and 100 rad/s, equivalent to 1.5 × 10–3–1.5 m/s). Experiments were imaged continuously (every ~ 2 s) with an optical camera, Logitech web camera Pro 9000, to follow the shear deformation in the granular media on the outer wall. In addition, for a few experiments we took high resolution videos (60 fps with shutter speed up to 10–4 s) of specific time intervals during the experiments. Specific experimental runs are referred to by our internal laboratory experiment numbers in the form of iexpxxx to ensure accurate data management for comparison with future work (Table 1). The experimental procedure consists of ten alternating velocity steps: five low velocity ones (0.1 rad/s) and five high velocity ones (100 rad/s) (Fig. 2a). Each velocity step lasts for 200 or 400 s and the transition between steps is gradual (Table 1).

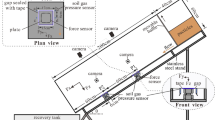
Experimental setup in a rheometer loading system. a A ring-shaped (annular) cell (dashed frame) placed on a static base that includes the temperature control plate and underneath the force transducer measuring the normal load. The loading system at top, stress and rotate the sample by the rotor. A web camera continuously images the experiments. b Quartz sand in the annular cell. An inner steel core (black) sets the cell inner diameter, where the granular material (in brown) is overlain by the rotor (shaded gray in the inset). Acoustic emission (AE) sensors are glued to the glass jacket. Sample height (h) is defined as the distance between the sample bottom and the rotor

Velocity steps protocol and the resultant sample height. a Velocity protocol of a typical experiment. This velocity-controlled experiment consists of ten alternating steps: five low velocity (0.1 rad/s) and five high velocity (100 rad/s) steps. The calculated inertial numbers (I) suggest that high velocity steps are within the grain-inertial regime while the low velocity steps are in the quasi-static regime. In general, each velocity step lasts for 200 s and the transition between steps is gradual. An average value of the tangential velocity is given in the equivalent velocity axis. b δh as function of time for dry (iexp191, red) water (iexp193, blue) and oil (iexp268, green) saturated experiments. During the high velocity steps sample height increases with different magnitude for each interstitial fluid. ∆h is defined as the difference between the sample height at high and low velocities (red, blue, and green arrows). Bolded parts at the end of each velocity step are where acoustic emission (AE) data were collected and average sample height calculated. The AE data collected for two steps (purple rectangles) is presented in Fig. 5
In addition to the rheology variables, we simultaneously measured acoustic emission (AE) signals by sensors attached to the glassy cell walls. Up to four AE sensors (Mini30S by Physical Acoustics Corporation) were glued (with Loctite 409) to the outer side of the glass jacket (Fig. 1b). Each AE sensor was connected to the National Instrument digitizer (NI PCI 6132) through an AE preamplifier (2/4/6 Preamplifier by Physical Acoustics Corporation). The AE system is controlled by LabView interface and synchronized with the rheometer data acquisition. The acoustic system is capable recording data up to 2 MHz with sensors flat response at 270–970 kHz.
All experiments were run at room humidity and temperature conditions. For the saturated experiment we immersed the dry grains in deionized water or silicone oil. To saturate the grains with water we simply add the water to the stressed system from the thin gap between the steel rotor and the glass jacket. However, this procedure was not possible for the high viscosity silicone oil. The viscosity values used for this study (in Pa s): air 2 × 10–5, water 9 × 10–4, silicone oil 0.35. Silicone oil viscosity is given for the specific product, Fluka Silicone oil DC 200, on the product label and its data sheet. For air and water, we use common viscosity values at 25 °C. Therefore, to ensure saturation and avoid as possible trapped air bubbles, we first poured the fluid into the empty cell and then added the granular sample. No major difference is observed in the results of experiments used these different precondition procedures and we will not discuss this point further in the text. A gap of 20 µm separates between the glass jacket and the rotor walls. This distance prevents the escape of the original sheared grains from the cell but generally allow fluids to flow from and into the cell. We define the leaky boundary condition for the fluid phase as the situation where the fluid can generally flow through this gap, but at a restricted flow rate because of the thin gap and the fluid properties. For low-viscous fluids like air and water this boundary is relatively permeable and therefore the boundary condition is partially drained, whereas for high-viscous fluids like the silicone oil this boundary is less permeable and is partly undrained. In addition, this situation is also distinct from a fully drained boundary condition as the requirements of constant fluid pressure on the boundary is not necessarily met in our experiments.
We observed that the mobilized shear band thickness, the distance between the rotor-sample contact and the higher location within the granular sample with no grain motion (within two seconds), depends on the applied velocity and the interstitial fluid. To quantify the deformation thickness, we estimated the average horizontal velocity at each depth for experiments # 191, 193 and 268 using a Particle Image Velocimetry (PIV) matlab tool [19]. Although the image acquisition rate (0.5 Hz) is too low to capture the high velocity moving particles, their motion at low velocities (~ 1 × 10–4 m/s) is well-measured and allow to determine the deformation thickness.
3 Review of predicted regimes based on dimensionless numbers
Ancey et al. [11] suggest that the competing processes in the flow are: (1) friction, (2) granular pressure and (3) lubrication pressure. Approximating each of these forces using a linearization of the governing equations, results in an order of magnitude approximation. These approximations can then be combined to define a series of nondimensional numbers that should be able to predict the flow regime. In particular, the resulting dimensionless numbers are: (A) Inertial number (Friction/granular pressure); (B) Bagnold (granular pressure/lubrication); (C) Leighton number (friction/lubrication).
In dry granular matter, increasing shear velocity, increases granular pressure and thus the inertial number, causes dilatancy in the dense granular flow [20, 21]. This dilatancy under constant load conditions reflects the change from quasi-static to grain inertial granular regimes. Granular pressure is the averaged stress induced by the momentum transfer during grain collisions, given by [1, 21, 22]:
where ρp is the particle density, 2700 kg/m3 for the quartz sand used for the experiments, d is the characteristic grain diameter, 3.5 × 10–4 for the sheared fraction. The shear strain rate, \(\dot{\gamma }\), is approximated by \(\dot{\gamma }=\frac{V}{W}\), where the typical shear band thickness W = 10d following velocity profiles of these and similar experiments [23], and the shear velocity, V, is 1.5 m/s for the high velocity steps. The parameter λ is the ratio of grain diameter (d) to space between grains (s). The spacing ratio λ, known as the linear concentration, is related to the solid fraction, \({\phi }_{s}\) as \(\lambda =\frac{1}{{\left({\phi }_{s}^{*}/{\phi }_{s}\right)}^\frac{1}{3}-1}\) where \({\phi }_{s}^{*}\) is the maximum possible solid fraction of the grain pack, ~ 0.74 for densely packed spheres [9]. The effect of this λ2 can be significant in dense grain beds where the spacing between particles, s, is smaller than the grain size. In these cases, the granular pressure increases remarkably, even at moderate shear rates.
We use \(\lambda =10\) as an order of magnitude approximation based on typical values of \({\phi }_{s}\sim 0.5-0.55\) for spherical grains [24]. In the supplement, we return to this assumption in light of the experimental results and show that it was quite reasonable (Text S2).
The resulting granular pressure from Eq. (1) for the high velocity steps is 6.1 kPa, greater than the averaged normal stress applied on the grains by the rotor, P = 1.6 kPa. Hence, granular pressure effects may control the flow during high velocity shear. For instance, to satisfy the constant stress boundary condition, the system dilates.
Particle vibrations and collisions are encapsulated in a granular pressure term that is given in Eq. (1). The relative size of the granular pressure to the normal loading pressure P is usually evaluated by neglecting λ and forming the dimensionless ratio
which is termed the Savage number, also known as the square of the inertial number for dense flows [9, 25]. In this assessment, natural granular flows commonly are thought to have negligible effect from granular pressure because of the large overburdens involved. Takahashi [26] points out a potential issue with this simplification of the Savage number. The neglect of λ may result in an underestimate of the granular pressure, but the magnitude of this effect is difficult to capture a priori since it is nonlinear. The granular packing measured by λ depends on the granular pressure which depends on λ. Equation (2) also assumes that the granular pressure is linearly independent of any fluid flow process and therefore is assumed to hold regardless of the fluid composition. We therefore also consider a slightly modified Savage number Sa’ = λ2 Sa.
In the presence of viscous fluids, an additional dimensionless number is required, as first recognized by Bagnold [1] who suggested that the viscous stresses regime (low Bagnold number) is dominated by the viscosity of Newtonian fluids at low Reynolds numbers. Bagnold derived a nondimensional number that defines the ratio between inertial grain stress and the viscous shear stress which is now known as Bagnold number and given by:
where η is the fluid viscosity. Bagnold also acknowledged that the formulation is likely inadequate in very dense cases and limited his interpretation to values of λ < 12. Geological shear flows can be precisely in this high-density regimes. The concentration is coupled to the overburden and therefore the linear analysis of the dimensionless numbers may be inadequate.
In addition, hydrodynamic lubrication can change the internal pressure of the shear flow and therefore the macroscopic behavior [27,28,29,30,31]. To compare the magnitude of frictional and lubricated forces we follow Ancey et al. [11] and use the Leighton number, assuming that the minimum gap between particles (ε) is on the order of d/λ:
For Le >> 1 and Ba << 1, granular flows should be controlled by hydrodynamic effects [11].
Calculations of these three nondimensional numbers (Eqs. 2–4) should help determine the relevant granular regime for specific flow conditions. The results of the calculated nondimensional numbers are given in Table 2. The calculated Savage and Leighton numbers for the slow experimental steps are very low, suggesting that regardless the interstitial fluid, frictional contacts control the physics of flow.
However, the results are harder to interpret for the high velocity steps. For the high velocity, the Savage number based on Eq. (2) is on the order of 10–2, which is not as extreme as the low velocity value, but still below unity and therefore suggests that the granular flow is controlled by frictional contacts rather than collisions. However, as discussed above, Sa’ may be a more appropriate measure of the regime and if λ = 10, Sa’ ~ 1. The value of Sa’ suggests that all our high velocity experiments could be partly controlled by collisions.
For the dry experiments where Sa’ ~ 1, Le ~ 10–5 and Ba ~ 104, no further competing processes are suggested by the analysis and the flow should be under the frictional–collisional regime [11]. The water-saturated, high-velocity experiments are less extreme with Sa’ ~ 1, Ba ~ 102 and Le ~ 10–3 suggesting the flow is in the frictional-collisional regime but perhaps the inference is less definitive because of the more moderate Bagnold number. In contrast, the oil-saturated flows Sa’, Ba and Le are all near ~ 1, suggests that in addition to collisional and frictional effects, lubricated contacts may change the physical behavior of the flow. Without the measurements of sample volume and AE data, these dimensionless numbers are close enough to the transitional behavior to be raise significant uncertainty about their flow regime.
In summary, prior to examining the experimental results in the next chapter, the nondimensional numbers suggest that: (1) frictional contacts control low velocity flows, (2) during the high velocity steps collisional contacts should be considered, but are not definitively required and the predicted regime is ambiguous, and (3) for the high velocity oil experiment all contact processes may be involved in the flow. Diagnosing the regimes requires an experimental tool to distinguish the nature of the contacts during flow.
4 Results
A substantial change in granular flow volume is measured when altering shear velocity under constant normal stress (Fig. 2). Increasing shear velocity from 0.1 to 100 rad/s causes dilatancy (rotor moves up), i.e. sample height \(h\equiv {h}_{0}+\delta h\) increases, volume increases, and therefore solid fraction decreases (where \({h}_{0}\) is the initial sample height and \(\delta h\) is the change in height from the initial stage, Fig. 3a). This process is reversible as the sample compacted with velocity decrease (Fig. 2b). We define ∆h, as the sample height difference between the steady state height value during high and low velocity steps (Fig. 3a).

Sample height difference (∆h) is critically controlled by the interstitial fluid. a A cross section through the cell and rotor (sample in brown). Sample height increase from low velocity (left) to high velocity (right) step. ∆h is the difference between the sample height measured at different velocities. b The absolute value of ∆h is plotted versus step number (squares) for dry (red) water (blue) and oil (green) saturated experiments. There is one point on this plot for each transition between velocity steps (low to high and high to low velocity steps). The experiments presented in Fig. 2b are bolded
A similar trend of sample height is observed for the fluid saturated granular material, although ∆h is substantially different (Figs. 2b and 3b). To evaluate ∆h, we averaged sample height values around the end of each velocity step, where AE data collected and height value reaches steady state (thicker sections in the curves of Fig. 2b). The difference in sample height between subsequent steps gives ∆h, and these values are plotted against experimental steps in Fig. 3b. With experiment time, i.e., increasing experimental step number, ∆h reaches a stable value. For the dry experiments this value ranges between 250 and 330 µm, for the water saturated between 50 and 200 µm, and for the silicone oil 700–1200 µm.
The effect of the thin gap separates between the inner (stainless cylinder) and outer (glass jacket) cell walls to the rotor walls can be clearly observed in the experimental results. For the water-saturated and dry experiments, the dilation and compaction curves on both side of a high velocity step looks similar with an instantaneous change that follows the velocity increase/decrease (Fig. 2b). This instantaneous change suggests that the low viscous fluid pass through the thin gap with no significant disturbance. However, for the oil-saturated experiments, while the dilation stage looks similar to the low-viscous fluids, the compaction stage lasting over 150 s. We suggest that the long compaction stage is due to the slow flowing oil through the thin gap. Immediately after the rotor decelerates, the velocity of grains decreases and they settled down on the cell bottom. As a result, the solid fraction increase and the rotor is trying to catch up with the grains to preserve the constant load boundary condition. However, at that stage the oil is actually supporting the moving down rotor while the oil is slowly injected out through the thin gap. The rotor is moving down and pushing the oil, until it achieves contact with the grains again. It then re-shears the grains at slow velocity and reaches steady state where the granular flow is fully supporting the stressed rotor. This is not a symmetric process because during velocity increase and dilation the grains support the rotor all the way up and are directly responsible for the observed, fast, dilation. Although these processes are important to understand the experimental results and the physical behavior of our system, the main results that measured at quasi-steady state conditions are not affected by this transient fluid boundary effect. Therefore, we will assume from here on that the boundary condition for the fluid phase is partially drained and leaky and we will not discuss this point further in the text.
In addition to sample height, the interstitial fluid also controls the mobilized shear band thickness during high velocity steps. Using the PIV image processing tool, we obtained the velocity profiles of the high velocity step of experiments #191, 193, and 268 discussed previously in Fig. 2b. The mean horizontal velocity of the particles at each depth is calculated from pairs of subsequent images (2 s apart). Averaging these velocity profiles for several image pairs is given in Fig. 4b. The low acquisition rate of the web camera, together with image smearing (caused by low shutter speed; see Fig. 4a), limits the reliability of the velocity profiles only for low velocities up to 10–4 m/s. We defined the mobilized shear band thickness as the distance between rotor and depth of mobilization, i.e., where averaged horizontal velocity drops to zero. Following this definition, we show that thicker mobilized shear bands are obtained for oil-saturated experiments and the thinnest bands for water-saturated experiments (Fig. 4b). We also observed that thicker bands are correlated with larger dilatancy (compare the velocity profiles to the solid lines in Fig. 4b).

Velocity profile across the sample. a A typical photo taken during a high velocity step of an oil saturated experiment (iexp268). Sample bottom (black line) is stationary while the top (green line) is stressed by a rotor moving at a constant high velocity. The distance between is defined as the sample height, 11.4 mm in this case. b Horizontal velocity profile of the high velocity experiments marked by purple rectangle in Fig. 2b. Each circle represent the average horizontal velocity calculated by image processing of subsequent photos. The velocity increases from zero at the bottom, up to ~ 10–4 m/s (higher velocities could not be analyzed with the current imaging rate and therefore are not presented in this plot). Sample height (solid lines) is highest for oil (green) and lowest for water (blue) saturated experiments as seen in Fig. 2(b). Particle motion is deepest for the granular pack of the oil experiment, while grains start to move at shallower depth for dry (red) and water saturated experiments
In general, the acoustic emission (AE) event rate and their amplitudes are larger for higher shear velocities. While isolated AE events are clearly detected during low velocity steps (Figs. 5a and S2), for high velocity steps, events overlap, resulting in a noisy signal (Fig. 5b). Note, that during the flow of grains, in addition to grain-grain interactions there are interactions between grains to the glass jacket (frictional or collisional). We could not distinguish between those events and therefore one should consider that a part of the AE events source from grain to glass interactions. In most AE measurements, during low velocity steps the number of events and their maximum amplitude is highest for water-saturated experiments (Fig. 5a). However, for dry grains sheared at high velocity, the AE signal amplitude, is slightly higher or equal to that observed for water-saturated experiments. Moreover, the AE amplitude of the high velocity oil-saturated experiments is lower by an order of magnitude compare with the dry and the water-saturated experiments (Fig. 5b). These AE observations for high velocity steps, suggest a difference in the AE events produced by shearing granular materials immersed in different fluids.

Acoustic emission signal of low (top) and high (bottom) velocity steps for three interstitial fluids. Signal amplitude in voltage given as function of time for dry (red) water (blue) and oil (green) saturated experiments. a The acoustic signal of low velocity steps is characterized by isolated events. The number of events and maximum amplitude is greater for the water saturated experiments. b The acoustic signal of high velocity steps is noisier as many events are interfering together to give the complicated waveform. The average amplitude of the AE signal of the water saturated experiments is slightly lower compared with the signals of the dry experiments. Note that the amplitude of the AE signal of the oil saturated experiment is significantly lower
The signal power of the AE signals can be used to quantitatively support the apparent variation in behavior with velocity and fluid properties. At each velocity step we calculated the acoustic emission power by summing the signal’s amplitude squared and dividing by the signal length to find the local average value. Here amplitude is measured in volts to provide a consistent, although arbitrary, scale. Examining sample height (h) as a function of the AE power suggests that low power values, < 10–4 V2, are associated with the low velocity steps, while values greater than 10–3 V2 are associated with the high velocity steps (Fig. 6). In addition, we observe that: (1) For low velocity steps, the experiments with the highest AE power as a group are the water-saturated experiments. (2) For high velocity steps, AE power is lower by approximately two orders of magnitudes for the oil-saturated compared with dry and water saturated experiments.

Sample height (h) as function of the AE signal power for experiments 190–303 (Table 1). For low velocity steps the AE power of water saturated experiments (blue) is statistically higher than the dry (red) experiments. For high velocity steps while the dry and the water saturated power values are similar those of oil (green) are over an order of magnitude lower. Encircled are AE data points of experiments # 191, 193 and 268 that are also shown in Fig. 2b. The experimental results empirically distinguishing the three rheophysical regimes, here schematically divided by grey fuzzy lines
5 Discussion
5.1 Interstitial fluids control sample volume at high shear velocities
The reversible dilatancy/compaction cycles are influenced by the interstitial fluid (Figs. 2b and 3b). For water saturated experiments ∆h is lower while for the oil ∆h is higher compared with the dry experiments values. The central purpose of this study is to suggest a method how to identify rheophysical regimes of granular flows using acoustic emission measurements. As will be shown below, AE are useful for this problem, but only interpretable in context of the dimensionless numbers.
During the water-saturated experiments, we suggest that ∆h decreases as a result of collisional damping by the viscous fluid. Decrease of the momentum transfer reduces granular pressure and therefore moderates dilatancy for the same granular temperature as demonstrated by the same range in acoustic energy on the x-axis of Fig. 6. The magnitude of the external force applied on the granular flow (gravity and normal load for the current experiments) together with internal characteristics of the flow, e.g. fluid viscosity, determines if the colliding grains will reach a true direct contact or a lubricated contact. For very low viscosities like in the dry case, lubrication pressure is relatively small and grains are fully in contact during impacts. For intermediate viscosities, like in the case of water, higher granular pressure reduces the momentum transfer during impact, but still most grains in contact during impacts. In contrast, for highly viscous fluids, like oil, the lubrication pressure is higher compared with the external load and therefore those impacts are fully lubricated and significantly less impacts take place and at the same time the system dilates.
5.2 Acoustic emission signals—implications for shear micromechanics
Acoustic emission measurements support the microphysical process of the different types of contacts during rapid flow of dense granular materials. Lubrication repulsive forces at grain contacts reduce the particle velocity that either weaken the impacts between grains (for true contacts) or reduces the number of impacts (for lubricated contacts). While the dilatancy measurements show counter behavior, the acoustic emission (AE) decreases with increasing the lubrication pressure. The AE reduction during high velocity water- saturated compared with dry experiments is clearly observed for some AE records (Fig. 5b). AE signals recorded during high velocity steps are thought to be the superposition of many isolated events, including those nucleate by collisions that are expected to take place in the grain-inertial regime. As collisions are slightly damped by the lubrication pressure, also the AE events of those impacts should be less energetic. Therefore, the AE signal amplitude should be lower compared with the dry experiments as indeed observed for some cases. Moreover, a comparison between the AE signals of dry and water saturated low velocity steps, supports that the lower AE signal in the saturated experiments is a source effect (e.g. damped impacts; for more details see the Online Resource).
Lubrication flow between colliding grains tends to dilate the system but at the same time significantly damp particle collisions and therefore the emission of acoustic energy. Interstitial fluids with higher viscosity increase the lubrication repulsive forces in the shear system. In the micromechanics of sheared grains, it means that fewer particles will collide and hence AE power will be reduced. Indeed, for high velocity steps of the oil-saturated experiments, AE energy decreases by almost two orders of magnitudes compared with the dry and the water-saturated experiments (Fig. 6). The AE measurements suggest an important, independent measurement of the sheared system that show a different trend of that recorded by the rheology (i.e., height) measurements. The combination of these measurements allow to better distinguish between the rheological regimes of granular flows.
5.3 Implications of experimental results for determining rheological flow regimes
Our first observation is that granular collisions are important in saturated, dense shear flows of natural particles. As discussed in the third section, this inference was not obvious based on an analysis of dimensionless numbers to define dynamical regimes. Classically, λ is not included in the granular pressure term of the Savage number (Eq. 3) and therefore even at high shear velocities Sa < < 1. Moreover, by including λ in Sa we get Sa’ ~ 1, suggesting that collisional contacts may play a role in the granular flow and there is some macroscopic dilatancy, but it is only when examining the AE measurements that the collisionally-generated noise becomes clear. As a result, the regimes are clearly separated in Fig. 6. Acoustic emissions are playing a pivotal role and empirically place the experiments in regimes that might have been anticipated based on earlier theoretical analysis.
For the oil saturated experiments while the dilation increase and significant reduction in AE power show clear transition to lubricated contact regimes, the nondimensional numbers only possibly point on transitional regime (Sa’ ~ Ba ~ Le ~ 1). The results suggest that the granular flow regimes are best established using the combination of theoretical calculations together with experimental, AE and dilatancy measurements (Fig. 6).
6 Conclusions
We study the rheology of saturated granular flows in the presence of different interstitial fluids. Using acoustic emission (AE) and dilatancy/compaction measurements under controlled shear velocities we were able to detect three flow regimes: (1) quasi-static, where frictional sliding between grains control the flow; (2) damped granular collisions; and (3) lubrication pressure regime. For high velocity shear flows we showed that the interstitial fluid can enhance or suppress the granular flow dilatancy depending on its properties. Higher viscosity fluids tend to increase dilatancy by lubrication pressure effects whereas lower viscous fluids may damp granular collisions. The AE measurements support the suggested micro-mechanisms in the granular flow and in general the damping of grain collisions and therefore the resultant AE. We use common nondimensional numbers: Savage, Bagnold and Leighton, to theoretically separate the observed granular regimes. We show that only calculations of these nondimensional numbers cannot clearly point on the rheophysical regimes of dense granular flows. The combination of AE and dilatancy measurements allow to empirically separate between the regimes.
Abbreviations
- Ba:
-
Bagnold number
- d :
-
Characteristic grain diameter
- h :
-
Sample height. The distance between the cell bottom and the rotor
- h 0 :
-
The initial sample height (before shearing)
- Le:
-
Leighton number
- P :
-
Normal loading pressure
- P grain :
-
Granular pressure
- s :
-
Space between neighboring grains also known as the free distance
- Sa:
-
Savage number
- Sa′′:
-
Modified Savage number
- V :
-
Rotor, tangential shear velocity
- W :
-
Shear band thickness
- \(\dot{\gamma }\) :
-
Shear strain rate
- ε :
-
Minimum gap between colliding particles
- δh :
-
Change in height (during shear)
- ∆h :
-
Sample height difference between high and low velocity steps
- \(\eta\) :
-
Fluid viscosity
- λ :
-
Linear grain concentration
- \({\rho }_{p}\) :
-
Particle density
- \({\phi }_{s}\) :
-
Solid fraction of the grain pack
- \({\phi }_{s}^{*}\) :
-
Maximum possible solid fraction of the grain pack
References
Bagnold, R.A.: Experiments on a gravity-free dispersion of large solid spheres in a Newtonian fluid under shear. Proc. R. Soc. A Math. Phys. Eng. Sci. 225, 49–63 (1954). https://doi.org/10.1098/rspa.1954.0186
Lemaître, A., Roux, J.N., Chevoir, F.: What do dry granular flows tell us about dense non-Brownian suspension rheology? Rheol. Acta. 48, 925–942 (2009). https://doi.org/10.1007/s00397-009-0379-3
Midi, G.D.R.: On dense granular flows. Eur. Phys. J. E. 14, 314–365 (2004). https://doi.org/10.1140/epje/i2003-10153-0
Taylor, S., Brodsky, E.E.: Granular temperature measured experimentally in a shear flow by acoustic energy. Phys. Rev. E. 96, 032913 (2017). https://doi.org/10.1103/PhysRevE.96.032913
Hanes, D.M., Inman, D.L.: Experimental evaluation of a dynamic yield criterion for granular fluid flows. J. Geophys. Res. 90, 3670–3674 (1985). https://doi.org/10.1029/JB090iB05p03670
Brady, J., Bossis, G.: Stokesian dynamics. Annu. Rev. Fluid Mech. 20, 111–157 (1988). https://doi.org/10.1146/annurev.fluid.20.1.111
Davis, R.H., Serayssol, J.M., Hinch, E.J.: The elastohydrodynamic collision of two spheres. J. Fluid Mech. 163, 479–497 (1986). https://doi.org/10.1017/S0022112086002392
Iverson, R.M.: The physics of debris flows. Rev. Geophys. 35, 245–296 (1997). https://doi.org/10.1029/97RG00426
Savage, S.B.: The mechanics of rapid granular flows. Adv. Appl. Mech. 24, 289–366 (1984). https://doi.org/10.1016/S0065-2156(08)70047-4
Coussot, P., Ancey, C.: Rheophysical classification of concentrated suspensions and granular pastes. Phys. Rev. E. Stat. Phys. Plasmas, Fluids Relat. Interdiscip. Top. 59, 4445–4457 (1999). https://doi.org/10.1103/PhysRevE.59.4445
Ancey, C., Coussot, P., Evesque, P.: A theoretical framework for granular suspensions in a steady simple shear flow. J. Rheol. (N. Y. N. Y). 43, 1673–1699 (1999). https://doi.org/10.1122/1.551067
van den Wildenberg, S., Yang, Y., Jia, X.: Probing the effect of particle shape on the rigidity of jammed granular solids with sound speed measurements. Granul. Matter. 17, 419–426 (2015). https://doi.org/10.1007/s10035-015-0575-z
Azéma, E., Estrada, N., Radjaï, F.: Nonlinear effects of particle shape angularity in sheared granular media. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 86, (2012). https://doi.org/10.1103/PhysRevE.86.041301
Burlini, L., Vinciguerra, S., Di Toro, G., De Natale, G., Meredith, P., Burg, J.P.: Seismicity preceding volcanic eruptions: New experimental insights. Geology 35, 183–186 (2007). https://doi.org/10.1130/G23195A.1
Grosse, C.U., Ohtsu, M.: Acoustic emission testing. Berlin: Springer Berlin Heidelberg (2008). https://doi.org/10.1007/978-3-540-69972-9
Michlmayr, G., Cohen, D., Or, D.: Sources and characteristics of acoustic emissions from mechanically stressed geologic granular media—a review. Earth-Sci. Rev. 112, 97–114 (2012). https://doi.org/10.1016/j.earscirev.2012.02.009
Hu, W., Scaringi, G., Xu, Q., Huang, R.: Acoustic emissions and microseismicity in granular slopes prior to failure and flow-like motion: The potential for early warning. Geophys. Res. Lett. 45, 10 (2018). https://doi.org/10.1029/2018GL079724
Lay, T., Wallace, T.C.: Modern Global Seismology. Academic Press, New York (1995)
Thielicke, W., Stamhuis, E.J.: PIVlab—towards user-friendly, affordable and accurate digital particle image velocimetry in MATLAB. J. Open Res. Softw. 2, 1–10 (2014). https://doi.org/10.5334/jors.bl
Van Der Elst, N.J., Brodsky, E.E., Le Bas, P.Y., Johnson, P.A.: Auto-acoustic compaction in steady shear flows: Experimental evidence for suppression of shear dilatancy by internal acoustic vibration. J. Geophys. Res. Solid Earth. 117, (2012)
Andreotti, B., Forterre, Y., Pouliquen, O.: Granular Media: Between Fluid and Solid. Cambridge University Press, Cambridge (2013)
Hill, K.M., Yohannes, B.: Rheology of dense granular mixtures: Boundary pressures. Phys. Rev. Lett. 106, 058302 (2011). https://doi.org/10.1103/PhysRevLett.106.058302
Siman-Tov, S., Brodsky, E.E.: Gravity-independent grain size segregation in experimental granular shear flows as a mechanism of layer formation. Geophys. Res. Lett. 45, 9 (2018). https://doi.org/10.1029/2018GL078486
Onoda, G.Y., Liniger, E.G.: Random loose packings of uniform spheres and the dilatancy onset. Phys. Rev. Lett. 64, 2727–2730 (1990). https://doi.org/10.1103/PhysRevLett.64.2727
Jop, P., Forterre, Y., Pouliquen, O.: A constitutive law for dense granular flows. Nature 441, 727–730 (2006). https://doi.org/10.1038/nature04801
Takahashi, T.: Debris Flow: Mechanics, Prediction and Countermeasures, 2nd edition. CRC Press, Boca Raton (2014)
Higashi, N., Sumita, I.: Experiments on granular rheology: Effects of particle size and fluid viscosity. J. Geophys. Res. Solid Earth. 114, 18 (2009). https://doi.org/10.1029/2008JB005999
Huang, N., Ovarlez, G., Bertrand, F., Rodts, S., Coussot, P., Bonn, D.: Flow of wet granular materials. Phys. Rev. Lett. 94, 028301 (2005). https://doi.org/10.1103/PhysRevLett.94.028301
Brodsky, E.E., Kanamori, H.: Elastohydrodynamic lubrication of faults. J. Geophys. Res. 106, 16357–16374 (2001). https://doi.org/10.1029/2001JB000430
Trulsson, M., Andreotti, B., Claudin, P.: Transition from the viscous to inertial regime in dense suspensions. Phys. Rev. Lett. 109, 118305 (2012). https://doi.org/10.1103/PhysRevLett.109.118305
Prasad, D., Kytömaa, H.K.: Particle stress and viscous compaction during shear of dense suspensions. Int. J. Multiph. Flow. 21, 775–785 (1995). https://doi.org/10.1016/0301-9322(95)00018-S
Acknowledgments
We thank Stephanie Taylor, Daniel Sampson, Brandon Cheney, Jeremy Hourigan, and Joe Cox for fruitful discussions and technical help. We also thank the editor and two anonymous reviewers for their constructive comments. Research was sponsored by the Army Research Laboratory and was accomplished under Grant Number W911NF-15-1-0012. The views and conclusions contained in this document are those of the authors and should not be interpreted as representing the official policies, either expressed or implied, of the Army Research Laboratory or the U.S. Government. The U.S. Government is authorized to reproduce and distribute reprints for Government purposes notwithstanding any copyright notation herein. This work was also funded in part by the Gordon and Betty Moore Foundation (GBMF3289 to EEB), NSF EAR-1624657, and The Ministry of National Infrastructure, Energy and Water Resources of Israel.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Siman-Tov, S., Brodsky, E.E. Distinguishing between rheophysical regimes of fluid-saturated granular-flows using dilatancy and acoustic emission measurements. Granular Matter 23, 44 (2021). https://doi.org/10.1007/s10035-021-01103-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10035-021-01103-8