
Abstract
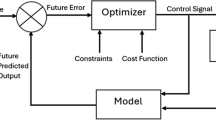
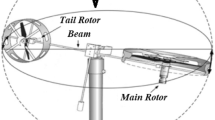
This paper proposed an adaptive explicit nonlinear model predictive control (AENMPC) technique using multiple estimation models with a convex combination framework [18] for a class of nonlinear MIMO systems. Here, the explicit solution for the control signal is obtained from an optimal performance index which can be formulated without online optimization. In this work, a closed-form control law is developed by approximating the tracking error in the receding horizon by its Taylor series expansion. The control performance of any model-based control technologies explicitly depends on the quality of the unknown system parameters hence an adaptive parameter estimator is used to estimate the system parameter online [16,17]. To ensure the boundedness of the estimated parameter within a predefined compact region, a projection based adaptive law is used [43]. Using an aerodynamic laboratory set-up, known as the twin-rotor multi-input multi-output system (TRMS), the effectiveness of the proposed control algorithm has been verified. The complete state information of the system to the proposed adaptive controller is given from an extended Kalman filter based state observer. The performance of the proposed adaptive control algorithm has been verified successfully in simulations as well as real-time experimental setup of the TRMS model and compared with an existing control approach.
Similar content being viewed by others

References
C. Sotelo, A. Favela-Contreras, F. Beltrán-Carbajal, G. Dieck-Assad, P. Rodríguez-Cañedo, and D. Sotelo, “A novel discrete-time nonlinear model predictive control based on state space model,” International Journal of Control, Automation and Systems, vol. 16, no. 6, pp. 2688–2696, 2018.
J. Liu and H. Xiao, “Distributed output feedback model predictive control for a team of coupled linear subsystems,” IET Control Theory & Applications, vol. 11, no. 11, pp. 1807–1812, 2017.
L. Dutta and D. K. Das, “A linear model predictive control design for magnetic levitation system,” Proc. of International Conference on Computational Performance Evaluation (ComPE), IEEE, pp. 39–43, 2020.
S. L. de Oliveira Kothare and M. Morari, “Contractive model predictive control for constrained nonlinear systems,” IEEE Transactions on Automatic Control, vol. 45, no. 6, pp. 1053–1071, 2000.
M. Zhao, C.-C. Jiang, and M.-H. She, “Robust contractive economic MPC for nonlinear systems with additive disturbance,” International Journal of Control, Automation and Systems, vol. 16, no. 5, pp. 2253–2263, 2018.
S. K. Pradhan and B. Subudhi, “Nonlinear adaptive model predictive controller for a flexible manipulator: An experimental study,” IEEE Transactions on Control Systems Technology, vol. 22, no. 5, pp. 1754–1768, 2014.
S. Koo, S. Kim, J. Suk, Y. Kim, and J. Shin, “Improvement of shipboard landing performance of fixed-wing uav using model predictive control,” International Journal of Control, Automation and Systems, vol. 16, no. 6, pp. 2697–2708, 2018.
N. Kirsch, N. Alibeji, and N. Sharma, “Nonlinear model predictive control of functional electrical stimulation,” Control Engineering Practice, vol. 58, pp. 319–331, 2017.
M. Islam, M. Okasha, and E. Sulaeman, “A model predictive control (MPC) approach on unit quaternion orientation based quadrotor for trajectory tracking,” International Journal of Control, Automation and Systems, vol. 17, no. 11, pp. 2819–2832, 2019.
V. Adetola, D. DeHaan, and M. Guay, “Adaptive model predictive control for constrained nonlinear systems,” Systems & Control Letters, vol. 58, no. 5, pp. 320–326, 2009.
J. Köhler, P. Kötting, R. Soloperto, F. Allgöwer, and M. A. Müller, “A robust adaptive model predictive control framework for nonlinear uncertain systems,” arXiv preprint arXiv:1911.02899, 2019.
V. A. Akpan and G. D. Hassapis, “Nonlinear model identification and adaptive model predictive control using neural networks,” ISA Transactions, vol. 50, no. 2, pp. 177–194, 2011.
M. Mehndiratta, E. Kayacan, S. Patel, E. Kayacan, and G. Chowdhary, “Learning-based fast nonlinear model predictive control for custom-made 3D printed ground and aerial robots,” Handbook of Model Predictive Control, Springer, pp. 581–605, 2019.
P. Bouffard, A. Aswani, and C. Tomlin, “Learning-based model predictive control on a quadrotor: Onboard implementation and experimental results,” Proc. of IEEE International Conference on Robotics and Automation, IEEE, pp. 279–284, 2012.
P. Bouffard, A. Aswani, and C. Tomlin, “Learning-based model predictive control on a quadrotor: Onboard implementation and experimental results,” Proc. of IEEE International Conference on Robotics and Automation, IEEE, pp. 279–284, 2012.
V. K. Pandey, I. Kar, and C. Mahanta, “Controller design for a class of nonlinear MIMO coupled system using multiple models and second level adaptation,” ISA Transactions, vol. 69, pp. 256–272, 2017.
V. K. Pandey, I. Kar, and C. Mahanta, Adaptive Controller Design for Nonlinear Uncertain Systems Using Multiple Model Based Two Level Adaptation Technique, Ph.D. dissertation, 2018.
V. K. Pandey, I. Kar, and C. Mahanta, “Multiple models and second level adaptation for a class of nonlinear systems with nonlinear parameterization,” Proc. of Industrial and Information Systems (ICIIS), 2014 9th International Conference on, IEEE, pp. 1–6, 2014.
F. Borrelli, A. Bemporad, M. Fodor, and D. Hrovat, “An MPC/hybrid system approach to traction control,” IEEE Transactions on Control Systems Technology, vol. 14, no. 3, pp. 541–552, 2006.
A. Grancharova and T. A. Johansen, “Explicit approximate approach to feedback min-max model predictive control of constrained nonlinear systems,” Proc. of the 45th IEEE Conference on Decision and Control, IEEE, pp. 4848–4853, 2006.
S. M. Tabatabaei, S. Kamali, M. R. Jahed-Motlagh, and M. B. Yazdi, “Practical explicit model predictive control for a class of noise-embedded chaotic hybrid systems,” International Journal of Control, Automation and Systems, vol. 17, no. 4, pp. 857–866, 2019.
N. Xian and Z. Chen, “A quantum-behaved pigeon–inspired optimization approach to explicit nonlinear model predictive controller for quadrotor,” International Journal of Intelligent Computing and Cybernetics, vol. 11, no. 1, pp. 47–63, 2018.
D. Zhao, C. Liu, R. Stobart, J. Deng, E. Winward, and G. Dong, “An explicit model predictive control framework for turbocharged diesel engines,” IEEE Transactions on Industrial Electronics, vol. 61, no. 7, pp. 3540–3552, 2014.
C. Liu, W.-H. Chen, and J. Andrews, “Tracking control of small-scale helicopters using explicit nonlinear mpc augmented with disturbance observers,” Control Engineering Practice, vol. 20, no. 3, pp. 258–268, 2012.
D. Tavernini, F. Vacca, M. Metzler, D. Savitski, V. Ivanov, P. Gruber, A. E. Hartavi, M. Dhaens, and A. Sorniotti, “An explicit nonlinear model predictive ABS controller for electro-hydraulic braking systems,” IEEE Transactions on Industrial Electronics, vol. 67, no. 5, pp. 3990–4001, 2019.
M. Metzler, D. Tavernini, A. Sorniotti, and P. Gruber, “Explicit non-linear model predictive control for vehicle stability control,” Proc. of 9th International Munich Chassis Symposium 2018, Springer, pp. 733–752, 2019.
A. Rahideh, A. H. Bajodah, and M. H. Shaheed, “Real time adaptive nonlinear model inversion control of a twin rotor MIMO system using neural networks,” Engineering Applications of Artificial Intelligence, vol. 25, no. 6, pp. 1289–1297, 2012.
L. John and S. Mija, “Robust H∞ control algorithm for twin rotor MIMO system,” Proc. of Advanced Communication Control and Computing Technologies (ICACCCT), 2014 International Conference on, IEEE, pp. 168–173, 2014.
J.-G. Juang, W.-K. Liu, and R.-W. Lin, “A hybrid intelligent controller for a twin rotor MIMO system and its hardware implementation,” ISA Transactions, vol. 50, no. 4, pp. 609–619, 2011.
S. K. Mishra and S. Purwar, “To design optimally tuned fopid controller for twin rotor MIMO system,” Proc. of Engineering and Systems (SCES), 2014 Students Conference on, IEEE, 2014, pp. 1–6.
H. R. Karimi and M. R. J. Motlagh, “Robust feedback linearization control for a non linearizable MIMO nonlinear system in the presence of model uncertainties,” Proc. of IEEE International Conference on Service Operations and Logistics, and Informatics, Shanghai, China, pp. 965–970, 2006.
D. K. Saroj, I. Kar, and V. K. Pandey, “Sliding mode controller design for twin rotor MIMO system with a nonlinear state observer,” Proc. of International Mutli-Conference on Automation, Computing, Communication, Control and Compressed Sensing (iMac4s), IEEE, 2013, pp. 668–673.
N. Norsahperi and K. Danapalasingam, “Particle swarm-based and neuro-based FOPID controllers for a twin rotor system with improved tracking performance and energy reduction,” ISA Transactions, vol. 102, pp. 230–244, 2020.
J. Lai, C. Zhou, J. Su, M. Xie, J. Liu, and T. Xie, “A permanent magnet flux linkage estimation method based on luenberger observer for permanent magnet synchronous motor,” Proc. of 22nd International Conference on Electrical Machines and Systems (ICEMS), IEEE, 2019, pp. 1–6.
S. N. Hasan and I. Husain, “A luenberger-sliding mode observer for online parameter estimation and adaptation in high-performance induction motor drives,” IEEE Transactions on Industry Applications, vol. 45, no. 2, pp. 772–781, 2009.
A. Srivastava, D. K. Das, A. Rai, and R. Raj, “Parameter estimation of a permanent magnet synchronous motor using whale optimization algorithm,” Proc. of Recent Advances on Engineering, Technology and Computational Sciences (RAETCS), IEEE, pp. 1–6, 2018.
C. Tan, G. Tao, H. Yang, and F. Xu, “A multiple-model adaptive control scheme for multivariable systems with uncertain actuation signs,” Proc. of American Control Conference (ACC), 2017, IEEE, pp. 1121–1126, 2017.
M. J. Rana, M. S. Shahriar, and M. Shafiullah, “Levenbergmarquardt neural network to estimate UPFC-coordinated pss parameters to enhance power system stability,” Neural Computing and Applications, vol. 31, no. 4, pp. 1237–1248, 2019.
W.-H. Chen, “Predictive control of general nonlinear systems using approximation,” IEE Proceedings-Control Theory and Applications, vol. 151, no. 2, pp. 137–144, 2004.
Z. Han and K. S. Narendra, “New concepts in adaptive control using multiple models,” IEEE Transactions on Automatic Control, vol. 57, no. 1, pp. 78–89, 2012.
A. Teel, R. Kadiyala, P. Kokotovic, and S. Sastry, “Indirect techniques for adaptive input-output linearization of nonlinear systems,” International Journal of Control, vol. 53, no. 1, pp. 193–222, 1991.
K. S. Narendra and A. M. Annaswamy, Stable Adaptive Systems, Courier Corporation, 2012.
N. Hovakimyan and C. Cao, L1 Adaptive Control Theory: Guaranteed Robustness with Fast Adaptation, SIAM, 2010.
A. Grancharova and T. A. Johansen, “Explicit approximate approach to feedback min-max model predictive control of constrained nonlinear systems,” Proc. of the 45th IEEE Conference on Decision and Control, IEEE, pp. 4848–4853, 2006.
A. Rahideh and M. Shaheed, “Constrained output feedback model predictive control for nonlinear systems,” Control Engineering Practice, vol. 20, no. 4, pp. 431–443, 2012.
A. Cezayirli and M. Kemal Ciliz, “Indirect adaptive control of non-linear systems using multiple identification models and switching,” International Journal of Control, vol. 81, no. 9, pp. 1434–1450, 2008.
K. S. Narendra and J. Balakrishnan, “Adaptive control using multiple models,” IEEE Transactions on Automatic Control, vol. 42, no. 2, pp. 171–187, 1997.
Z. Han and K. S. Narendra, “Second level adaptation using multiple models,” Proc. of the American Control Conference, IEEE, pp. 2350–2355, 2011.
S. Sastry and M. Bodson, Adaptive Control: Stability, Convergence and Robustness, Courier Corporation, 2011.
G. Kreisselmeier, “Adaptive observers with exponential rate of convergence,” IEEE Transactions on Automatic Control, vol. 22, no. 1, pp. 2–8, 1977.
Author information
Authors and Affiliations
Corresponding author
Additional information
Lakshmi Dutta received her B.E. degree in instrumentation and control engineering from Dr. D.Y.Patil Pratishthan’s college of Engineering, Pune, India. She received an M.Tech degree in control and instrumentation engineering from Netaji Subhash Engineering college, West Bengal, India. Currently she is pursuing a Ph.D. degree in the Department of Electrical and Electronic Engineering from National Institute of Technology Nagaland, India. Her research interests include nonlinear estimation and adaptive model predictive control with application in control system.
Dushmanta Kumar Das is a Member of IEEE. He received his B.Tech. degree in electronics and instrumentation engineering from BPUT, Odisha, India. He received an his M.Tech and Ph.D. degrees in control system engineering from the National Institute of Technology Rourkela, India, in 2010 and 2015, respectively. Since 2013, he has been with National Institute of Technology Nagaland, India as an Assistant Professor. His research interests include control system, robotics, soft computing, machine learning, meta-heuristic optimization techniques, and application of optimization techniques.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Dutta, L., Das, D.K. A New Adaptive Explicit Nonlinear Model Predictive Control Design for a Nonlinear MIMO System: An Application to Twin Rotor MIMO System. Int. J. Control Autom. Syst. 19, 2406–2419 (2021). https://doi.org/10.1007/s12555-020-0272-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-020-0272-5