
Abstract
This study considers the tracking control problem of the nonstrict-feedback nonlinear system with unknown backlash-like hysteresis, and a finite-time adaptive fuzzy control scheme is developed to address this problem. More precisely, the fuzzy systems are employed to approximate the unknown nonlinearities, and the design difficulties caused by the nonlower triangular structure are also overcome by using the property of fuzzy systems. Besides, the effect of unknown hysteresis input is compensated by approximating an intermediate variable. With the aid of finite-time stability theory, the proposed control algorithm could guarantee that the tracking error converges to a smaller region. Finally, a simulation example is provided to further verify the above theoretical results.
Similar content being viewed by others

1 Introduction
As we know, nonlinear systems are widespread in practice, especially with the advancement of science and technology, there are more and more nonlinear phenomena in actual control systems. Therefore, the control problem of nonlinear systems has naturally become a hot topic. In the past few decades, a series of nonlinear system control methods have been developed, such as backstepping control, sliding mode control, robust control, and adaptive control, which greatly enriched the nonlinear system control theory. Besides, many scholars have successfully dealt with a lot of complex control problems by combining multiple control technologies [1,2,3,4,5,6] or fusing some intelligent control methods (fuzzy control [7,8,9] and neural network control [10, 11]). For example, a robust adaptive control strategy for the nonlinear system with actuator failures is given in [5]. By means of the approximation abilities of the fuzzy logic system (FLS) and neural network (NN), two adaptive control strategies for switched nonlinear systems are proposed in [8] and [10], respectively. It should be noted that a common feature of literature [7,8,9,10,11] is that the controlled systems are all in the form of the lower triangle structure, so the final controllers can be calculated according to the idea of backstepping recursion. However, this method is not suitable for the more general nonstrict-feedback nonlinear system, in which the unknown i-th subsystem function contains all state variables. A variable separation method based on the structural characteristics and monotonically increasing nature of the boundary function is adopted to solve this problem in [12]. Moreover, the authors of [13] and [14] successfully overcome this difficulty by using the properties of FLS and NN.
On the other hand, due to the limitations of physical components, actual control systems often have many nonlinear characteristics such as saturation [15, 16], dead zone [17, 18], and hysteresis [19,20,21] that can adversely affect system performance. In order to make the control method of nonlinear systems more effective in practical engineering, it is necessary to fully understand these nonlinear characteristics. Different from the time delay in the usual sense, the hysteresis phenomenon is often a dynamic process and has the characteristics of nonsmooth, multi-mapping, and memory. In recent years, the sensing and driving technology with smart materials as the core has been widely used in many fields due to its strong adaptability to environmental changes and excellent performance, such as aerospace, micro-robots, and bioengineering. However, the hysteresis characteristics existing in many smart materials can not only cause system oscillations, reduce the control accuracy of the system, and even cause the system to fail to operate normally. Therefore, the research on the control problems of nonlinear systems with hysteresis input is beneficial to realize the high requirements on the system performance. In view of the rich practical application background of nonlinear systems with hysteresis, the related research has always been favored by scholars [22,23,24,25,26,27]. Huang et al. [24] and Yu et al. [26] consider the output feedback control problems for switched and stochastic nonlinear systems with unknown hysteresis input, respectively. For the nonlinear multi-agent system with unknown actuator hysteresis, an adaptive event-triggered control scheme is given in [27].
However, in practical applications, the system cannot maintain a long or even infinite operating cycle, especially for some systems that require relatively high time performance. Therefore, it is necessary to study how to obtain the ideal tracking performance in a finite time. Finite-time control is usually regarded as a time-optimal control strategy and has a good robust performance. Since the finite-time Lyapunov stability theory is proposed, finite-time control has been developed rapidly and widely used, and a large number of excellent results have been reported [28,29,30,31,32]. Based on the above discussions, the tracking control problem of nonstrict-feedback nonlinear systems with unknown backlash-like hysteresis is taken into account in this study. With the help of FLS and finite-time Lyapunov stability theory, a finite-time adaptive fuzzy control algorithm is developed to resolve this problem, the characteristics of which compared with the existing results are listed as follows:
-
(1)
Different from [22], since the system considered in this study is a nonstrict-feedback form, it is more general and has greater model versatility for the actual system. Moreover, the effect caused by the unknown hysteresis input is compensated by approximating an intermediate variable, and this method can avoid the singularity problem, which is different from [23].
-
(2)
Based on finite-time stability theory, the proposed control scheme in this study could guarantee that the tracking error converges to near the origin in a finite time. Meanwhile, a higher tracking accuracy can be realized.
2 System Description and Preliminaries
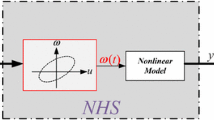
Consider the following nonstrict-feedback nonlinear system with unknown hysteresis input
where \(\zeta _i\) is the system state with \(\zeta =[\zeta _1,\ldots ,\zeta _n]^T\), \(y\in R\) is the system output, \(f_i(\zeta )\) is the unknown smooth nonlinear function, \(d_i(t)\) is the unknown time-varying disturbance, \(u\in R\) is the output of the unknown backlash-like hysteresis described by
where \(\nu\) is the input of the backlash-like hysteresis; k, \(\varsigma\) and c are unknown constants, \(\varsigma >0\) is the slope of the lines and satisfies \(\varsigma >c\). Figure 1 shows the backlash-like hysteresis curves generated by the model (2), where \(k=1\), \(\varsigma =3.1635\), \(b=0.345\), the input signals are \(\nu (t)=\kappa \sin (2.3t)\) with \(\kappa =4.5\) and \(\kappa =6.5\), and the initial values are \(\nu (0)=0\) and \(u(0)=0\).

Backlash-like hysteresis curves
As stated in [19], (2) can be expressed as
where \(\nu _0=\nu (0)\), \(u_0=u(0)\), \(d(\nu )\) satisfies \(|d(\nu )|\le D\) with the unknown constant D. Therefore, the system (1) is rewritten as
The control objective of this study is to construct an adaptive fuzzy controller for the system (1) such that the system output y can track the reference signal \(y_r\) in a finite time, and all signals in the closed-loop system are bounded. To this end, we need to introduce the following assumptions and knowledge.
Assumption 1
The reference signal \(y_r\) and its time derivative up to the nth order \(y^{(n)}_{r}\) are continuous and bounded.
Assumption 2
There exists the unknown constant \(\bar{d}_i\) such that \(|d_i(t)|\le \bar{d}_i\), \(i=1,\dots ,n\).
Definition 1
[33] Consider the nonlinear system \(\dot{\zeta }=f(\zeta (t))\), the equilibrium \(\zeta =0\) is practical finite-time stable, if for any \(\zeta (0)\in \zeta _0\), there exist a constant \(\varepsilon >0\) and the settling time \(T(\varepsilon ,\zeta _0)<\infty\) such that
Lemma 1
[34] For positive constants \(\alpha\), \(\beta\), \(0<p<1\) and \(0<\Gamma <\infty\), if there is a positive-definite function \(V(\zeta )\) satisfying
then the trajectory of \(\dot{\zeta }=f(\zeta (t))\) is practical finite-time stable, and \(V(\zeta )\) satisfies
with \(0<\omega <1\) and \(T=\frac{1}{\beta (1-p)}\ln \frac{\beta V^{1-p}(\zeta _0)+\omega \alpha }{\omega \alpha }\).
Lemma 2
[35] For real variables \(\mu , \varpi\) and constant \(\pi _i>0~(i=1,2,3)\), one has
Lemma 3
[36]: For any \(\zeta _i\in R\), \(i=1,\ldots ,n\), \(0<p\le 1\), one has
In the subsequent control design, FLS would be utilized to estimate the unknown nonlinear function.
IF-THEN Rules: \({\mathcal{R}}^i\): If \(\zeta _1\) is \({\mathcal{F}}^i_1\) and ...and \(\zeta _n\) is \({\mathcal{F}}^i_n\), then y is \({\mathcal{G}}^i\), \(i=1,\ldots ,N\).
The FLS could be formulated as
Denote \(\phi _i(\zeta )=\frac{\prod ^n_{j=1}\mu _{{\mathcal{F}}^i_j}(\zeta _j)}{\sum ^N_{i=1}\left[ \prod ^n_{j=1}\mu _{{\mathcal{F}}^i_j}(\zeta _j)\right] }\), \(\Phi (\zeta )=[\phi _1(\zeta ),\ldots ,\phi _N(\zeta )]^T\), \({\mathcal{H}}=[h_1,\ldots ,h_N]^T\), then one has
Lemma 4
[28]: For any continuous function \(h(\zeta )\) defined on the compact set U, there is a FLS \({\mathcal{H}}^T\Phi (\zeta )\) satisfying
with \(\epsilon >0\) being an arbitrary constant.
3 Adaptive Fuzzy Control Design
The control design begins with the following coordinate transformations
where \(\alpha _{i-1}\) is the virtual control law. Next, we denote \(\theta =\max {\{\Vert {\mathcal{H}}_i\Vert ^2, i=1,\dots ,n\}}\) and \(\rho =\frac{1}{\varsigma }\), \({\hat{\theta }}\) and \({\hat{\rho }}\) are estimates of \(\theta\) and \(\rho\), respectively. In accordance with the backstepping technique, the virtual and actual controllers are designed as
with the constant \(c_i, a_i>0\) \((i=1,\dots ,n)\). Meanwhile, the corresponding adaptive laws are
where \(\sigma ,r>0\) are known constants, and \(\tau _n\) will be defined later.
Step 1: Based on (3), (4), and (5), the derivative of \(s_1\) is calculated as
Define
with \(\tilde{\theta }=\theta -{\hat{\theta }}\). Then, it is deduced that
where \(p=\frac{\check{m}}{\check{n}}<1\) with positive odd integers \(\check{m}\), \(\check{n}\), \(\bar{f}_1(X_1)=f_1(\zeta )-\dot{y}_r+k_1s^{2p-1}_1+s_1\) and \(X_1=[\zeta ,y_r,\dot{y}_r]^T\). According to Lemma 4, the FLS \({\mathcal{H}}^T_1\Phi _1(X_1)\) could be employed to approximate the unknown term \(\bar{f}_1(X_1)\), i.e.,
with an approximation error \(\Delta _1(X_1)\) and \(\epsilon _1>0\). Based on Young’s inequality and the property of FLS \(0<\Phi ^T_1(\cdot )\Phi _1(\cdot )\le 1\), one has
where \(Z_1=[\zeta _1,y_r,\dot{y}_r]^T\). Substituting (14) and (15) into (13) produces
Furthermore, by substituting the first virtual controller (6) into (16), we have
with \(\tau _1=\frac{s^2_1}{2a^2_1\Phi ^T_1(Z_1)\Phi _1(Z_1)}\) and \(\iota _1=\frac{1}{2}(\bar{d}^2_1+a^2_1+\epsilon ^2_1)\).
Step \(i~(i=2,\dots ,n-1)\): It follows from (3) and (5) that
When the following Lyapunov function candidate is considered
then one has
where \(\bar{f}_i(X_i)=f_i(\zeta )-\sum ^{i-1}_{j=1}\frac{\partial \alpha _{i-1}}{\partial \zeta _j}(\zeta _{j+1}+f_j(\zeta )+d_j(t)) -\sum ^{i-1}_{j=0}\frac{\partial \alpha _{i-1}}{\partial y^{(j)}_r}y^{(j+1)}_r -\frac{\partial \alpha _{i-1}}{\partial {\hat{\theta }}}\dot{{\hat{\theta }}}+k_is^{2p-1}_i+s_i\) and \(X_i=[\zeta ,y_r,\dots ,y^{(i)}_r,{\hat{\theta }}]^T\). Based on Lemma 4, there exists a FLS \({\mathcal{H}}^T_i\Phi _i(X_i)\) that can estimate the unknown term \(\bar{f}_i(X_i)\). For any \(\epsilon _i>0\),
where \(|\Delta _i(X_i)|\le \epsilon _i\) is an approximation error. As the same case of (14) and (15), the following inequalities hold
where \(Z_i=[\zeta _1,\dots ,\zeta _i,y_r,\dots ,y^{(i)}_r,{\hat{\theta }}]^T\). Substituting them into (20), we have
Then, substituting (7) into (23) yields
with \(\tau _i=\tau _{i-1}+\frac{s^2_i}{2a^2_i\Phi ^T_i(Z_i)\Phi _i(Z_i)}\) and \(\iota _i=\iota _{i-1}+\frac{1}{2}(\bar{d}^2_i+a^2_i+\epsilon ^2_i)\).
Step n : From (3) and (5), we have
Choose
with \(\tilde{\rho }=\rho -{\hat{\rho }}\). Then, it could be obtained that
with \(\bar{f}_n(X_n)=f_n(\zeta )-\sum ^{n-1}_{j=1}\frac{\partial \alpha _{n-1}}{\partial \zeta _j}(\zeta _{j+1}+f_j(\zeta )+d_j(t)) -\sum ^{n-1}_{j=0}\frac{\partial \alpha _{n-1}}{\partial y^{(j)}_r}y^{(j+1)}_r -\frac{\partial \alpha _{n-1}}{\partial {\hat{\theta }}}\dot{{\hat{\theta }}}+k_ns^{2p-1}_n+s_n\) and \(X_n=[\zeta ,y_r,\dots ,y^{(n)}_r,{\hat{\theta }}]^T\). According to Lemma 4, for the arbitrary constant \(\epsilon _n>0\), one has
where the approximation error \(\Delta _n(X_n)\) satisfies \(|\Delta _n(X_n)|\le \epsilon _n\). Similar to (14) and (15), the following inequalities hold
where \(Z_n=X_n\). Substituting them into (27) leads to
where \(\tau _n=\tau _{n-1}+\frac{s^2_n}{2a^2_n\Phi ^T_n(Z_n)\Phi _n(Z_n)}\) and \(\iota _n=\iota _{n-1}+\frac{1}{2}\Big ((D+\bar{d}_n)^2+a^2_n+\epsilon ^2_n\Big )\). By combining (8)–(10), it could be deduced that
4 Main Results
Theorem 1
For the nonlinear system (1) with unknown hysteresis input (2), under Assumption 1 and 2, applying the proposed control scheme (6)–(10), the following conclusions hold:
-
(1)
the tracking error could converge to near the origin in a finite time;
-
(2)
all signals in the closed-loop system are bounded.
Proof Recalling the definitions of \(\theta\) and \(\rho\), one has
By substituting them into (31), we could get
Based on Lemma 2, one has
Substituting (33) and (34) into (32) and combining Lemma 3, we could further derived that
with \(\alpha =\min \{2^pk_j,r,\sigma \}\), \(\beta =\min \{2c_j,(1-p)r,(1-p)\sigma \}\) and \(\Gamma =\iota _n +\frac{r}{2\lambda }\theta ^2 +\frac{\sigma \varsigma }{2\gamma }\rho ^2 +(r+\sigma )(1-p).\)
It follows from (35) and Lemma 1 that
and \(T=\frac{1}{\beta (1-p)}\ln \frac{\beta V^{1-p}_n(\zeta _0)+\omega \alpha }{\omega \alpha }\).
Then combining with the definition \(V_n\), it is not difficult to deduce that
that is, the tracking error could converge to near the origin in the limited time by choosing the suitable parameters.
On the other hand, from (35), we have \(\dot{V}_n(t)\le -\beta V_n(t)+\Gamma\) and \(V_n(t)\le \left( V_n(0)-\frac{\Gamma }{\beta }\right) e^{-\beta t}+\frac{\Gamma }{\beta }\), which means that \(s_i\), \(\tilde{\theta }\), \({\hat{\theta }}\), \(\tilde{\rho }\) and \({\hat{\rho }}\) are bounded. It follows from (6) to (8) that \(\alpha _i\) \((i=1,\dots ,n)\) and \(\nu\) are bounded because of the boundedness of the included variables. Moreover, combining (4) and (5), we could obtained that \(\zeta _i\) \((i=1,\dots ,n)\) is bounded. Consequently, all signals in the closed-loop system remain bounded. This completes the proof.
Remark 1 The challenges of this study mainly include two aspects: on the one hand, the controlled system in this study is a nonstrict-feedback form, which makes the standard backstepping technology not directly applicable to the control design of such systems. To this end, we have solved this problem with the help of the property of the fuzzy logic system \(0<\Phi ^T_i(\cdot )\Phi _i(\cdot )\le 1\) (Details can be seen in formulas (14), (21), and (28)). On the other hand, how to deal with the problems caused by the unknown hysteresis input also needs to be considered in control design. Inspired by Reference [23], we introduced a new intermediate variable \(\rho =\frac{1}{\varsigma }\). Furthermore, the effect caused by the unknown hysteresis input can be compensated by approximating the new variable \(\rho\). It should be pointed out that, compared with the method in Reference [23], the proposed method does not discuss whether the parameter \({\hat{\rho }}\) will be equal to 0, because \({\hat{\rho }}\) will not appear in the denominator.
5 Simulation Example
This section aims to further intuitively verify the proposed control algorithm through simulation results.
Consider the following nonlinear system with unknown actuator hysteresis
where \(f_1(\zeta )=0.05\zeta _2\cos (\zeta _1)\), \(f_2(\zeta )=0.1\zeta _1\sin (\zeta _2)\), \(d_1(t)=0.1\cos t\), \(d_2(t)=0.5\sin t\); u is the output of the backlash-like hysteresis described by (2) with \(k=1\), \(\varsigma =3.1635\) and \(c=0.345\). The reference trajectory is \(y_r=\sin t\).
In this simulation, the following membership functions are selected
with \(\chi _i=9,7,5,3,1,0,-1,-3,-5,-7,-9\), \(j=1,2\) and \(i=1,\dots ,11\). To fulfill the control objective, the controllers are designed in accordance with the aforementioned design procedures
and adaptive laws can be calculated as
with \(\tau _2=\frac{s^2_1}{2a^2_1\Phi ^T_1(Z_1)\Phi _1(Z_1)} +\frac{s^2_2}{2a^2_2\Phi ^T_2(Z_2)\Phi _2(Z_2)}\).

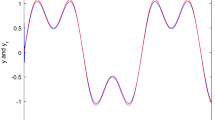
The system output y and the reference signal \(y_r\)

The tracking error \(s_1\)

States \(\zeta _1\) and \(\zeta _2\)

Control signals u and \(\nu\)

Adaptive parameters \({\hat{\theta }}\) and \({\hat{\rho }}\)
The initial conditions are \(\zeta _1(0)=-0.2\), \(\zeta _2(0)=0\), \({\hat{\theta }}(0)={\hat{\rho }}(0)=1\). The parameters to be designed are \(c_1=16\), \(c_2=10\), \(a_1=a_2=1\), \(\lambda =1\), \(r=0.1\), \(\gamma =6\), \(\sigma =0.1\). The simulation results are exhibited in Figs. 2, 3, 4, 5, and 6. The system output y and the reference signal \(y_r\) are plotted in Fig. 2. Figure 3 presents the curve of the tracking error \(s_1\). As shown in Fig. 2, the maximum tracking error is less than 0.05 after 2 second. Thus, it can be seen from these two figures the system output y could track the reference trajectory \(y_r\). The trajectories of system states \(\zeta _1\) and \(\zeta _2\) are displayed in Fig. 4. The control signals are exhibited in Fig. 5. Then combined with Fig. 2, we could get that the proposed control scheme can still achieve tracking control performance in the presence of unknown hysteresis input. Figure 6 gives the trajectories of adaptive parameters \({\hat{\theta }}\) and \({\hat{\rho }}\). As these figures show, all signals in the closed-loop system are bounded. Consequently, the proposed scheme could achieve the control objective.
6 Conclusions
In this study, a finite-time tracking control strategy is proposed for the nonstrict-feedback nonlinear system with unknown actuator hysteresis. Based on the property of FLS, the design difficulties caused by the nonstrict-feedback structure are successfully resolved. In the presence of unknown nonlinear input, better tracking performance could be obtained in a finite time by combining FLS and adaptive backstepping technology. In the future, how to address the fixed-time tracking control problem for the nonlinear system with unknown nonlinear input is very meaningful and challenging work.
References
Zhou, J., Wen, C.Y., Wang, W.: Adaptive control of uncertain nonlinear systems with quantized input signal. Automatica 95, 152–162 (2018)
Li, X.J., Shen, X.Y.: A data-driven attack detection approach for DC servo motor systems based on mixed optimization strategy. IEEE Trans. Ind. Inform. 16(9), 5806–5813 (2020)
Yang, T., Sun, N., Fang, Y.C., Xin, X., Chen, H.: New adaptive control methods for n-Link robot manipulators with online gravity compensation: design and experiments. IEEE Trans. Ind. Electron. (2021). https://doi.org/10.1109/TIE.2021.3050371
Li, Y.X.: Barrier Lyapunov function-based adaptive asymptotic tracking of nonlinear systems with unknown virtual control coefficients. Automatica 121, 109181 (2020). https://doi.org/10.1016/j.automatica.2020.109181
Zhao, K., Lei, T., Lin, T., Chen, L.: Robust adaptive fault-tolerant quantized control of nonlinear systems with constraints on system behaviors and states. Int. J. Robust Nonlinear Control 30(8), 3215–3233 (2020)
Yang, T., Sun, N., Chen, H., Fang, Y.C.: Observer-based nonlinear control for tower cranes suffering from uncertain friction and actuator constraints with experimental verification. IEEE Trans. Ind. Electron. (2020). https://doi.org/10.1109/TIE.2020.2992972
Sun, W., Su, S.F., Xia, J.W., Zhuang, G.M.: Command filter-based adaptive prescribed performance tracking control for stochastic uncertain nonlinear systems. IEEE Trans. Cybern. (2020). https://doi.org/10.1109/TSMC.2019.2963220
Liu, Y.L., Ma, H.J.: Adaptive fuzzy tracking control of nonlinear switched stochastic systems with prescribed performance and unknown control directions. IEEE Trans. Syst. Man Cybern.: Syst. 50(2), 590–599 (2020)
Gao, C., Zhou, X., Liu, X.P., Yang, Y.H., Li, Z.G.: Observer-based adaptive fuzzy tracking control for a class of strict-feedback systems with event-triggered strategy and Tan-type barrier Lyapunov function. Int. J. Fuzzy Syst. 22, 2534–2545 (2020)
Niu, B., Li, L.: Adaptive neural network tracking control for a class of switched strict-feedback nonlinear systems with input delay. Neurocomputing 173, 2121–2128 (2016)
Li, X.J., Yang, G.H.: Neural-network-based adaptive decentralized fault-tolerant control for a class of interconnected nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 29(1), 144–155 (2018)
Chen, B., Liu, K.F., Liu, X.P., Shi, P., Lin, C., Zhang, H.G.: Approximation-based adaptive neural control design for a class of nonlinear systems. IEEE Trans. Cybern. 44(5), 610–619 (2014)
Li, Y.M., Tong, S.C.: Command-filtered-based fuzzy adaptive control design for MIMO-switched nonstrict-feedback nonlinear systems. IEEE Trans. Fuzzy Syst. 25(3), 668–681 (2017)
Cui, G.Z., Yang, W., Yu, J.P.: Neural network-based finite-time adaptive tracking control of nonstrict-feedback nonlinear systems with actuator failures. Inf. Sci. 545, 298–311 (2021)
Sun, W., Su, S.-F., Liu, Z.G., Sun, Z.Y.: Adaptive intelligent control for input and output constrained high-order uncertain nonlinear systems. IEEE Trans. Syst. Man Cybern.: Syst. (2019). https://doi.org/10.1109/TSMC.2019.2956063
Cui, G.Z., Yu, J.P., Wang, Q.G.: Finite-time adaptive fuzzy control for MIMO nonlinear systems with input saturation via improved command-filtered backstepping. IEEE Trans. Syst. Man Cybern.: Syst. (2020). https://doi.org/10.1109/TSMC.2020.3010642
Ma, L., Huo, X., Zhao, X.D., Zong, G.D.: Adaptive fuzzy tracking control for a class of uncertain switched nonlinear systems with multiple constraints: a small-gain approach. Int. J. Fuzzy Syst. 21(8), 2609–2624 (2019)
Tong, S.C., Li, Y.M., Sui, S.: Adaptive fuzzy output feedback control for switched nonstrict-feedback nonlinear systems with input nonlinearities. IEEE Trans. Fuzzy Syst. 24(6), 1426–1440 (2016)
Su, C.Y., Stepanenko, Y., Svoboda, J., Leung, T.P.: Robust adaptive control of a class of nonlinear systems with unknown backlash-like hysteresis. IEEE Trans. Autom. Control 45(12), 2427–2432 (2000)
Chen, X.K., Hisayama, T., Su, C.Y.: Adaptive control for uncertain continuous-time systems using implicit inversion of Prandtl-Ishlinskii hysteresis representation. IEEE Trans. Autom. Control 55(10), 2357–2363 (2010)
Zhou, J., Wen, C.Y., Li, T.S.: Adaptive output feedback control of uncertain nonlinear systems with hysteresis nonlinearity. IEEE Trans. Autom. Control 57(10), 2627–2633 (2012)
Liu, L., Tang, L.: Partial state constraints-based control for nonlinear systems with backlash-like hysteresis. IEEE Trans. Syst. Man Cybern.: Syst. 50(8), 3100–3104 (2020)
Qiu, J.B., Sun, K.K., Rudas, I.J., Gao, H.J.: Command filter-based adaptive NN control for MIMO nonlinear systems with full-state constraints and actuator hysteresis. IEEE Trans. Cybern. 50(7), 2905–2915 (2020)
Huang, L.T., Li, Y.M., Tong, S.C.: Fuzzy adaptive output feedback control for MIMO switched nontriangular structure nonlinear systems with unknown control directions. IEEE Trans. Syst. Man Cybern.: Syst. 50(2), 550–564 (2020)
Wang, F., Liu, Z., Zhang, Y., Chen, C.L.P.: Adaptive fuzzy control for a class of stochastic pure-feedback nonlinear systems with unknown hysteresis. IEEE Trans. Fuzzy Syst. 24(1), 140–152 (2016)
Yu, Z.X., Li, S.G., Yu, Z.S., Li, F.F.: Adaptive neural output feedback control for nonstrict-feedback stochastic nonlinear systems with unknown backlash-like hysteresis and unknown control directions. IEEE Trans. Neural Netw. Learn. Syst. 29(4), 1147–1160 (2018)
Zhou, Q., Wang, W., Ma, H., Li, H.Y.: Event-triggered fuzzy adaptive containment control for nonlinear multi-agent systems with unknown Bouc-Wen hysteresis input. IEEE Trans. Fuzzy Syst. (2019). https://doi.org/10.1109/TFUZZ.2019.2961642
Cui, G.Z., Yu, J.P., Shi, P.: Observer-based finite-time adaptive fuzzy control with prescribed performance for nonstrict-feedback nonlinear systems. IEEE Trans. Fuzzy Syst. (2020). https://doi.org/10.1109/TFUZZ.2020.3048518
Sun, W., Wu, Y.Q., Sun, Z.Y.: Command filter-based finite-time adaptive fuzzy control for uncertain nonlinear systems with prescribed performance. IEEE Trans. Fuzzy Syst. 28(12), 3161–3170 (2020)
Wang, F., Chen, B., Sun, Y., Gao, Y.L., Lin, C.: Finite-time fuzzy control of stochastic nonlinear systems. IEEE Trans. Cybern. 50(6), 2617–2626 (2020)
Wang, H.Q., Kang, S.J., Feng, Z.G.: Finite-time adaptive fuzzy command filtered backstepping control for a class of nonlinear systems. Int. J. Fuzzy Syst. 21(8), 2575–2587 (2019)
Lv, W.S., Wang, F.: Finite-time adaptive fuzzy tracking control for a class of nonlinear systems with unknown hysteresis. Int. J. Fuzzy Syst. 20(3), 782–790 (2018)
Zhu, Z., Xia, Y.Q., Fu, M.Y.: Attitude stabilization of rigid spacecraft with finite-time convergence. Int. J. Robust Nonlinear Control 21(6), 686–702 (2011)
Yu, S.H., Yu, X.H., Shirinzadeh, B., Man, Z.H.: Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica 41(11), 1957–1964 (2005)
Qian, C.J., Lin, W.: Non-Lipschitz continuous stabilizers for nonlinear systems with uncontrollable unstable linearization. Syst. Control Lett. 42(3), 185–200 (2001)
Hardy, G.H., Littlewood, J.E., Polya, G.: Inequalities. Cambridge University Press, Cambridge (1952)
Acknowledgements
This work was supported by the Natural Science Foundation of Shandong Province for Key Projects under Grant ZR2020KA010.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Diao, S., Sun, W., Wang, L. et al. Finite-Time Adaptive Fuzzy Control for Nonlinear Systems with Unknown Backlash-Like Hysteresis. Int. J. Fuzzy Syst. 23, 2037–2047 (2021). https://doi.org/10.1007/s40815-021-01066-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-021-01066-1