
Abstract
The purpose of this article is to study Turing pattern formation in one- and two-dimensional domains under heterogeneous distributions of the parameters for an activator-depleted model. Unlike previous studies of this nature, the choice of the heterogeneous distributions of the parameters is closely linked and estimated by use of rigorous wave mode selection in order to excite different modes in different subsets of the domains. This allows us to relate the numerical solutions with theoretical linear stability analytical results. Our most revealing results show that the wave modes of adjacent subsets evolve locally and yet possess continuity across the interface. These local patches of the solutions result in a globally heterogeneous solution stable only in the presence of heterogeneous distributions of the parameters. Furthermore, our results show that initial conditions continue to play a crucial role in the selection of excitable wave modes and consequently the formation of the inhomogeneous patterns formed. In particular, initial conditions influence pattern orientation and polarity, and yet with a prepattern, the patterns conserved orientation and polarity. Numerical solutions are obtained by the use of the finite element method and the backward Euler scheme to deal with the spatial and the time discretisations, respectively.













Similar content being viewed by others

Notes
In cases were \(r=0\) and \(r=0.5\) the distribution of parameters is homogeneous inside the whole domain, for the one-dimensional case.
The \(^\star \)’s indicate the use of \(\gamma =276\) and \(d=11.7\) and \(\gamma =1860\) and \(d=8.9\) instead of the values in Table 1.
References
Bird, R.B., Stewart, W.E., Lightfoot, E.N.: Transport Phenomena. Wiley, Hoboken (2002)
Diamnod, P.H., Ji, X.: Lecture 16: Spatial Pattern Formation by Turing Instability (2017)
Duque-Daza, C.A., Ramirez, A.M., Garzón-Alvarado, D.A.: Patrones de turing sobre superficies sometidas a deformación: un acercamiento desde el método lagrangiano total. Revista Internacional de Metodos Numericos para Calculo y Diseño en Ingeniería 28(4), 198–203 (2012)
Garzón-Alvarado, D.A.: Simulación de procesos de reacción-difusión: Aplicación a la morfogénesis de tejido óseo. Ph.D. thesis, Universidad de Zaragoza (2007)
Garzón-Alvarado, D.A., Galeano, C.H., Mantilla, J.M.: Turing pattern formation for reaction–convection–diffusion systems in fixed domains submitted to toroidal velocity fields. Appl. Math. Modell. 35, 4913–4925 (2011)
Garzón-Alvarado, D.A., Galeano, C.H., Mantilla, J.M.: Computational examples of reaction–convection–diffusion equations solution under the influence of fluid flow: first example. Appl. Math. Model. 36, 5029–5045 (2012a)
Garzón-Alvarado, D.A., Galeano, C.H., Mantilla, J.M.: Numerical tests on pattern formation in 2D heterogeneous muediums: an approach using the Schnakenberg model. Dyna 79(172), 56–66 (2012b)
Gierer, A., Meinhardt, H.: A theory of biological pattern formation. Kybernetik 12, 30–39 (1972)
Klika, V., Baker, R.E., Headon, D., Gaffney, E.A.: The influence of receptor–mediated interactions on reaction–diffusion mechanisms of cellular self-organisation. Bull. Math. Biol. 74, 935–957 (2012)
Klika, V., Gaffney, E.A.: History dependence and the continuum approximation breakdown: the impact of domain growth on Turing’s instability. Proc. R. Soc. A. 473, 20160744 (2017)
Kozák, M., Gaffney, E.A., Klika, V.: Pattern formation in reaction–diffusion systems with piecewise kinetic modulation: an example study of heterogeneous kinetics. Phys. Rev. E 100, 042220 (2019)
Krause, A.L., Klika, V., Woolley, T.E., Gaffney, E.A.: Heterogeneity induces spatiotemporal oscillations in reaction–diffusion systems. Phys. Rev. E 97, 052206 (2018)
Krause, A.L., Klika, V., Woolley, T.E., Gaffney, E.A.: From one pattern into another: analysis of Turing patterns in heterogeneous domains via WKBJ. J. R. Soc. Interface 17, 20190621 (2020)
Madzvamuse, A.: A numerical approach to the study of spatial pattern formation. Ph.D. thesis, Exeter college, University of Oxford (2000)
Madzvamuse, A., Chung, A.H.W.: Fully implicit time-stepping schemes and non-linear solvers for systems of reaction–diffusion equations. Appl. Math. Comput. 244, 361–374 (2014)
Madzvamuse, A., Gaffney, E.A., Maini, P.K.: Stability analysis of non-autonomous reaction–diffusion systems: the effects of growing domains. J. Math. Biol. 61, 133–164 (2010)
Madzvamuse, A., Thomas, R.D.K., Maini, P.K., Wathen, A.J.: A numerical approach to the study of spatial pattern formation in the ligaments of arcoid bivalves. Bull. Math. Biol. 64, 501–530 (2002)
Maini, P.K., Benson, D.L., Sherratt, J.A.: Pattern formation in reaction–diffusion models with spatially inhomogeneoos diffusion coefficients. IMA J. Math. Appl. Med. Biol. 9, 197–213 (1992)
May, A., Firby, P.A., Bassom, A.P.: Diffusion driven instability in an inhomogeneous circular domain. Math. Comput. Modell. 29, 53–66 (1999)
Murray, J.: Mathematical Biology II: Spatial Models and Biomedical Applications, 3rd Edition, vol. 18. Springer, New York (2003)
Nijhout, H.F., Maini, P.K., Madzvamuse, A., Wathen, A.J., Sekimura, T.: Pigmentation pattern formation in butterflies: experiments and models. Comptes Rendus Biologies 326, 717–727 (2003)
Page, K., Maini, P.K., Monk, N.A.M.: Pattern formation in spatially heterogeneous Turing reaction–diffusion models. Phys. D 181, 80–101 (2003)
Page, K.M., Maini, P.K., Monk, N.A.M.: Complex pattern formation in reaction–diffusion systems with spatially varying parameters. Phys. D 202, 95–115 (2005)
Perthame, B.: Linear instability, turing instability and pattern formation. In: Parabolic Equations in Biology, Chapter Linear Ins, pp. 117–143. Springer (2015)
Rodrigues, D., Barra, L.P., Lobosco, M., Bastos, F.: Analysis of Turing Instability in Biological Models, pp. 576–591. In ICCSA, Part VI (2014)
Rueda-Contreras, M.D., Aragón, J.L.: Alan Turing’s chemical theory of phyllotaxis. Revista Mexicana de Física 60, 1–12 (2014)
Sarfaraz, W., Madzvamuse, A.: Classification of parameter spaces for a reaction–diffusion model on stationary domains. Chaos Solitons Fractals 103, 1339–1351 (2017)
Schnakenberg, J.: Simple chemical reaction systems with limit cycle behaviour. J. Theor. Biol. 81, 389–400 (1979)
Sel’kov, E.E.: Self-oscillations in glycolysis. Eur. J. Biochem. 4, 79–86 (1968)
Turing, A.M.: The chemical basis of morphogenesis. Philos. Trans. R. Soc. Lond. B Biol. Sci. 237(641), 37–72 (1952)
Wei, M., Wu, J., Guo, G.: Steady state bifurcations for a glycolysis model in biochemical reaction. Nonlinear Anal. Real World Appl. 22, 155–175 (2015)
Acknowledgements
DHA was supported by the Universidad Nacional de Colombia through resolutions: 405 of 2019 and 051 and 0354 of 2020. This work was carried out when AM was visiting the Universidad Nacional de Colombia and DHA thanks the University of Sussex for its hospitality during his one-month research visit to the UK. AM is partly supported by the EPSRC Grant Number EP/J016780/1, the European Union Horizon 2020 research and innovation programme under the Marie Sklodowska-Curie Grant Agreement No. 642866, the Commission for Developing Countries and the Simons Foundation. AM is a Royal Society Wolfson Research Merit Award Holder funded generously by the Wolfson Foundation. AM is a Distinguished Visiting Scholar to the University of Johannesburg, Department of Mathematics, South Africa, and the Università degli Studi di Bari Aldo Moro, Bari, Italy.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declare that they have no conflict of interest.
Additional information
Communicated by Jeff Moehlis.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Turing pattern heterogeneous parameters activator-depleted model.
Appendices
Appendix A: Numerical Solution
1.1 Appendix A.1: The Finite Element Weak Formulation
Let \(w\in H^1(\Omega )\) be a test function. Integrating over \(\Omega \) the product of Eq. (1) and w, the weak formulation following integration by parts reads: find \(u,v\in L^2\big ([0,T],H^1(\Omega )\big )\) such that:
where \({\mathbf {n}}\) is the normal vector to \(\Gamma \). Bringing in the zero Neumann boundary conditions, the last term of Eq. (A.1) vanishes.
1.2 Appendix A.2: Spatial Discretisation
To build the finite element approximation, let us consider \(\Omega ^h\subset \Omega \) a discretisation of \(\Omega \) with vertices \(\varvec{x}^h_j\in \Omega \), \(j=1,\ldots ,N_n\) defined by: \(\Omega ^h=\bigcup _{e=1}^{N_e}\Omega _e^h\). In one-dimensional domains, \(\Omega _e^h\), \(e=1,\ldots ,N_e\), are segments limited by two vertex \(\varvec{x}^h_j\), while in two-dimensional domains are quadrilaterals defined by four vertex \(\varvec{x}^h_j\). \(\Omega _e^h\) are defined such that: \( \bigcap _{e=1}^{N_e}\text {Int}\Omega _e^h=\emptyset \), where \(\text {Int}\Omega _e^h\) is the interior of \(\Omega _e^h\) and \(\emptyset \) denotes the empty set.
Let us now define the finite element space as:
with basis \(\{\chi _i\}\) \(i=1,\ldots ,N_n\), such that \(\chi _i(\varvec{x}_j^h)=\delta _{ij}\) (\(\delta \) the Kronecker delta).
Consider the piece-wise linear approximations of \(u(\cdot ,t)\) and \(v(\cdot ,t)\), respectively, \(u^h(\cdot ,t)\in S^h(\Omega ^h)\) and \(v^h(\cdot ,t)\in S^h(\Omega ^h)\) defined by:
and the general form of \(\varphi \) as:
where \(\eta _i(t)\) are arbitrary bounded values.
Then, the discrete form of the weak problem Eq. (A.1) is: find \(u^h,v^h\in S^h(\Omega ^h)\) such that
notice that the sums for \(u^h\), \(v^h\) and \(\varphi \), the spatial dependency of \(\chi _i\) and \(\chi _j\), and the time dependency of \(U_j(t)\) and \(V_j(t)\) are omitted for notation simplicity, and that since \(\eta _i(t)\) are arbitrary they cancel out.
Let us rewrite Eq. (A.4) as:
where \({\mathbf {U}}_e\) and \({\mathbf {V}}_e\) are local nodal values of \(\Omega ^h_e\), \({\mathbb {M}}_e\) are local mass matrices:
\({\mathbb {K}}_e\) are local stiffness matrices:
and \({\mathbf {F}}_e\) and \({\mathbf {G}}_e\) are local reaction vectors:
1.3 Appendix A.3: The Temporal Discretisation Element-Wise
So far the system is completely discrete in space. Now, let us deal with the time-dependent terms. Consider \(\tau >0\) a time step such that \(t^k=k\tau \) with \(k=1,\ldots ,N_T\) and \(N_T\) the number of steps to discretise [0, T]. Applying the backward Euler scheme on Eq. (A.4) the fully discrete system of equations is given by:
Notice that since the nonlinear terms \({\mathbf {F}}_e\) and \({\mathbf {G}}_e\) implicitly depend on time they are computed at \(t^{k+1}\).
1.4 Appendix A.4: Fully Discrete Formulation
Let us now describe the numerical scheme to solve the nonlinear system of equations in Eq. (A.9). Let us rewrite Eq. (A.9) as:
where \({\mathbf {R}}_U\) and \({\mathbf {R}}_V\) are the residuals of the approximation. The Newton–Raphson scheme is then given by:
where \(\Delta {\mathbf {U}}^{k+1}\) and \(\Delta {\mathbf {V}}^{k+1}\) are the differences of the approximations of \({\mathbf {U}}^{k+1}\) and \({\mathbf {V}}^{k+1}\), respectively, between solver iterations. The partial derivatives in Eq. (A.11) are given by:
Appendix B: Further Details, Figures and Tables
1.1 Appendix B.1: Wave Number Tables
1.2 Appendix B.2: Changes in Polarity and Orientation
See Fig. 14.

Schematic diagrams of pattern polarity and orientation differences. a A reference pattern with a change of polarity in b and a change in orientation in c
1.3 Appendix B.3: Schematic Representation of \(c(k_2)\)
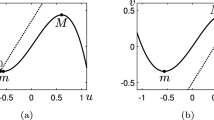
See Fig. 15.

Schematic representation of \(c(k_2)\)
1.4 Appendix B.4: Pattern Normalisation
where \(v_i\) is the nodal value of v at the ith node (given by the finite element method discretisation).
1.5 Appendix B.5: Discretisation and Convergence Criteria
Regarding the discretisation, one-dimensional simulations were performed with uniform meshes of 1001 nodes and 1000 elements, and the two-dimensional simulations with uniform meshes of 10,000 elements and 10,201 nodes. Additionally, a time step of 0.01 was defined.
The discrete \(L^2\)-norm time derivative was calculated globally, as presented in Sarfaraz and Madzvamuse (2017):
and the simulations were stopped after a given tolerance, say \(\varepsilon =10^{-6}\), was reached for both species.
1.6 Appendix B.6: Standard Convergence Graphics
See Fig. 16.

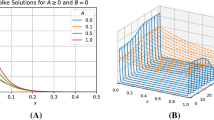
Convergence for the unit one-dimensional domain. The bold line ( ) and the dashed line (
) and the dashed line ( ) show the solutions of u and v, respectively. a Convergence to the heterogeneous solution with \((n_{\text {in}}=2,n_{\text {out}}=1)\) and \(r=0.25\) and b convergence to the homogeneous solution with \((n_{\text {in}}=2,n_{\text {out}}=1)\) and \(r=0.4\)
) show the solutions of u and v, respectively. a Convergence to the heterogeneous solution with \((n_{\text {in}}=2,n_{\text {out}}=1)\) and \(r=0.25\) and b convergence to the homogeneous solution with \((n_{\text {in}}=2,n_{\text {out}}=1)\) and \(r=0.4\)
Rights and permissions
About this article

Cite this article
Hernandez-Aristizabal, D., Garzón-Alvarado, D.A. & Madzvamuse, A. Turing Pattern Formation Under Heterogeneous Distributions of Parameters for an Activator-Depleted Reaction Model. J Nonlinear Sci 31, 34 (2021). https://doi.org/10.1007/s00332-021-09685-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00332-021-09685-6