
Abstract
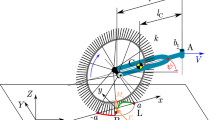
This paper analyses the stability of a waveboard, the skateboard consisting in two articulated platforms, coupled by a torsion bar and supported of two caster wheels. The waveboard presents an interesting propelling mechanism, since the rider can achieve a forward motion by means of an oscillatory lateral motion of the platforms. In this paper, the system is described using a multibody model with nonholonomic constraints.
To study the stability of the forward upright motion with constant speed, the equations of motion are linearized with respect to a reference motion. The employed numerical linearization procedure is valid for general multibody systems with holonomic and nonholonomic constraints. In practice, the employed approach makes use of the Jacobian matrix, which is expressed in terms of any of the main design parameters of the waveboard. This paper introduces a sensitivity analysis of the eigenvalues with respect to the forward speed, the casters’ inclination angle, the torsional stiffness of the torsion bar, the aspect ratio of the toroidal wheels and the mass of the human rider. Lastly, a summary with the influence of these design parameters on the external actuations exerted by the rider in the waveboard maneuvering is shown.

































Similar content being viewed by others


References
Kinugasa, K., Ishikawa, M., Sugimoto, Y., Osuka, K.: Modeling and control of casterboard robot. IFAC Proc. Vol. 46(23), 785–790 (2013)
Agrawal, A., Zaini, H.M., Dear, T., Choset, H.: Experimental gait analysis of waveboard locomotion. In: ASME 2016 Dynamic Systems and Control Conference, pp. V002T22A011–V002T22A011. Am. Soc. Mech. Eng., New York (2016)
Su, B., Wang, T., Wang, J., Kuang, S.: Kinematic mechanism and path planning of the essboard. Sci. China, Technol. Sci. 56(6), 1499–1516 (2013)
Wang, T., Su, B., Kuang, S., Wang, J.: On kinematic mechanism of a two-wheel skateboard: the essboard. J. Mech. Robot. 5(3), 034503 (2013)
Zeng, Z., Chen, D., Zhang, T., Guan, Y.: Kinematic modelling and analysis of an ess-board-like robot. In: 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), pp. 1371–1376. IEEE Press, New York (2018)
Ito, S., Niwa, K., Sugiura, S., Morita, R.: An autonomous mobile robot with passive wheels propelled by a single motor. Robot. Auton. Syst. 122, 103310 (2019)
Ito, S., Sugiura, S., Masuda, Y., Nohara, S., Morita, R.: Mechanism and control of a one-actuator mobile robot incorporating a torque limiter. J. Intell. Robot. Syst. 97(2), 431–448 (2020)
Gadzhiev, M.M., Kuleshov, A.S., Bukanov, A.I.: Geometric constraints in the problem of motion of a caster board. J. Math. Sci. 248, 1–5 (2020)
García-Agúndez, A., García-Vallejo, D., Freire, E.: Study of the forward locomotion of a three-dimensional multibody model of a waveboard by inverse dynamics. Mech. Mach. Theory 149, 103826 (2020)
Fukai, R., Yagi, K., Mori, Y.: Dynamic model for using casterboard by a humanoid robot. Adv. Robot. 34(10), 648–660 (2020)
DasGupta, A.: Dynamics of a waveboard simplified. Proc. R. Soc. A 476(2244), 20200486 (2020)
Ruina, A.: Nonholonomic stability aspects of piecewise holonomic systems. Rep. Math. Phys. 42(1–2), 91–100 (1998)
Zenkov, D.V., Bloch, A.M., Marsden, J.E.: The energy–momentum method for the stability of non-holonomic systems. Dyn. Stab. Syst. 13(2), 123–165 (1998)
Coleman, M.J., Holmes, P.J.: Motions and stability of a piecewise holonomic system: the discrete Chaplygin sleigh. Regul. Chaotic Dyn. 4(2), 55–77 (1999)
Bloch, A.M.: Asymptotic Hamiltonian dynamics: the Toda lattice, the three-wave interaction and the non-holonomic Chaplygin sleigh. Physica D 141(3–4), 297–315 (2000)
Bizyaev, I.A., Borisov, A.V., Mamaev, I.S.: The Chaplygin sleigh with parametric excitation: chaotic dynamics and nonholonomic acceleration. Regul. Chaotic Dyn. 22(8), 955–975 (2017)
Hubbard, M.: Mechanics of skate boards. J. Appl. Mech. 46, 931 (1979)
Kremnev, A.V., Kuleshov, A.S.: Nonlinear dynamics and stability of the skateboard. Discrete Contin. Dyn. Syst., Ser. S 3(1), 85 (2010)
Ostrowski, J., Lewis, A., Murray, R., Burdick, J.: Nonholonomic mechanics and locomotion: the snakeboard example. In: Proceedings of the 1994 IEEE International Conference on Robotics and Automation, pp. 2391–2397. IEEE Press, New York (1994)
Ostrowski, J.P., Desai, J.P., Kumar, V.: Optimal gait selection for nonholonomic locomotion systems. Int. J. Robot. Res. 19(3), 225–237 (2000)
Kuleshov, A.S.: Further development of the mathematical model of a snakeboard. Regul. Chaotic Dyn. 12(3), 321–334 (2007)
Basu-Mandal, P., Chatterjee, A., Papadopoulos, J.M.: Hands-free circular motions of a benchmark bicycle. Proc. R. Soc. A, Math. Phys. Eng. Sci. 463(2084), 1983–2003 (2007)
Meijaard, J.P., Papadopoulos, J.M., Ruina, A., Schwab, A.L.: Linearized dynamics equations for the balance and steer of a bicycle: a benchmark and review. Proc. R. Soc. A, Math. Phys. Eng. Sci. 463(2084), 1955–1982 (2007)
Escalona, J.L., Recuero, A.M.: A bicycle model for education in multibody dynamics and real-time interactive simulation. Multibody Syst. Dyn. 27(3), 383–402 (2012)
Xiong, J., Wang, N., Liu, C.: Stability analysis for the Whipple bicycle dynamics. Multibody Syst. Dyn. 48(3), 311–335 (2020)
Xiong, J., Wang, N., Liu, C.: Bicycle dynamics and its circular solution on a revolution surface. Acta Mech. Sin. 36(1), 220–233 (2020)
Sharp, R.S.: The stability and control of motorcycles. J. Mech. Eng. Sci. 13(5), 316–329 (1971)
Sharp, R.S.: Stability, control and steering responses of motorcycles. Veh. Syst. Dyn. 35(4–5), 291–318 (2001)
Sharp, R.S., Limebeer, D.J.N.: A motorcycle model for stability and control analysis. Multibody Syst. Dyn. 6(2), 123–142 (2001)
Schiehlen, W.: Multibody system dynamics: roots and perspectives. Multibody Syst. Dyn. 1(2), 149–188 (1997)
Nayfeh, A.: Nonlinear Interactions: Analytical, Computational, and Experimental Methods. Wiley, New York (2000)
Acknowledgements
This work was supported by Grant FPU18/05598 of the Spanish Ministry of Science, Innovation and Universities.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Agúndez, A.G., García-Vallejo, D., Freire, E. et al. Stability analysis of a waveboard multibody model with toroidal wheels. Multibody Syst Dyn 53, 173–203 (2021). https://doi.org/10.1007/s11044-021-09780-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-021-09780-2