
Multitemporal Water Extraction of Dongting Lake and Poyang Lake Based on an Automatic Water Extraction and Dynamic Monitoring Framework


Abstract
:
1. Introduction
2. Study Area and Experimental Data
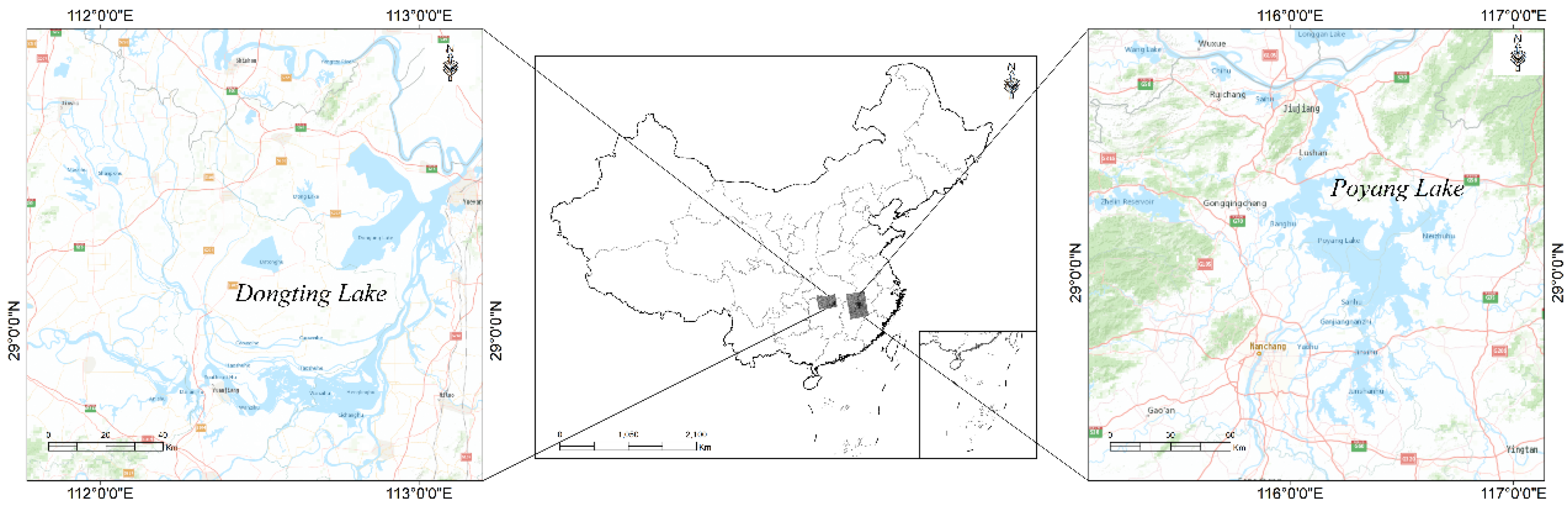
2.1. Study Area
2.2. Experimental Data
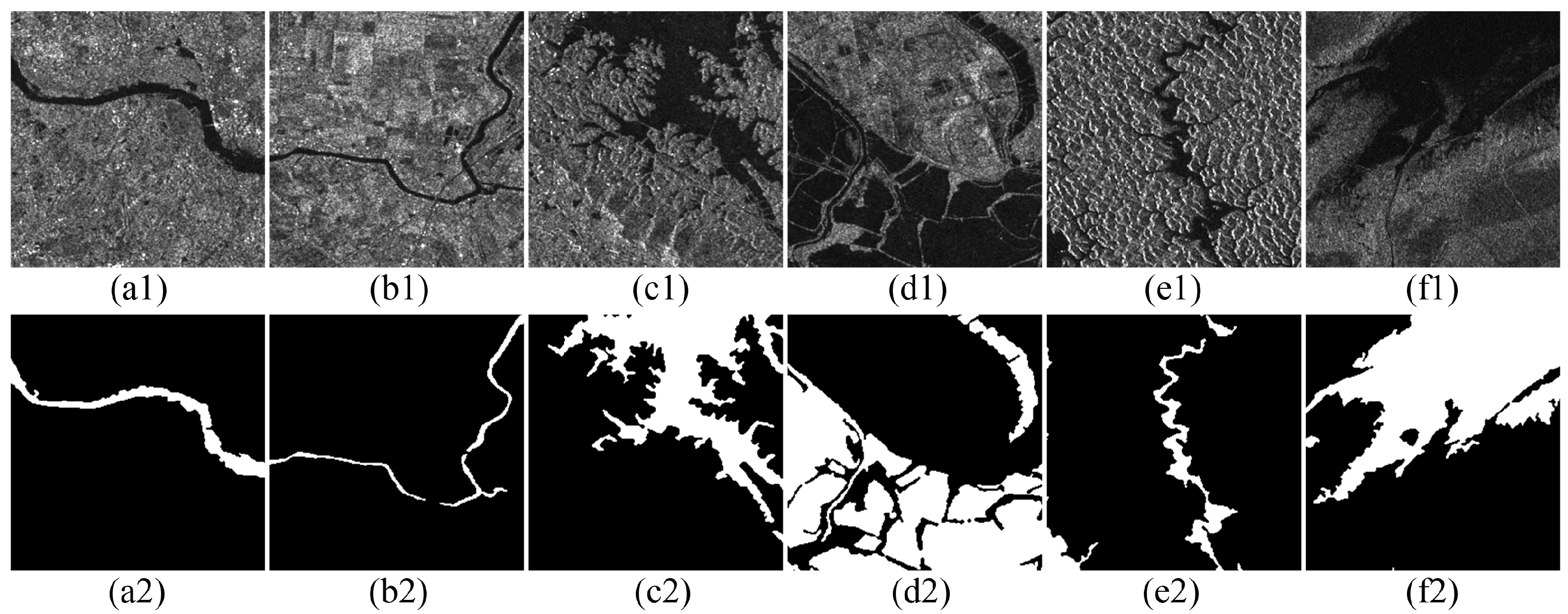
2.3. Training and Testing Datasets
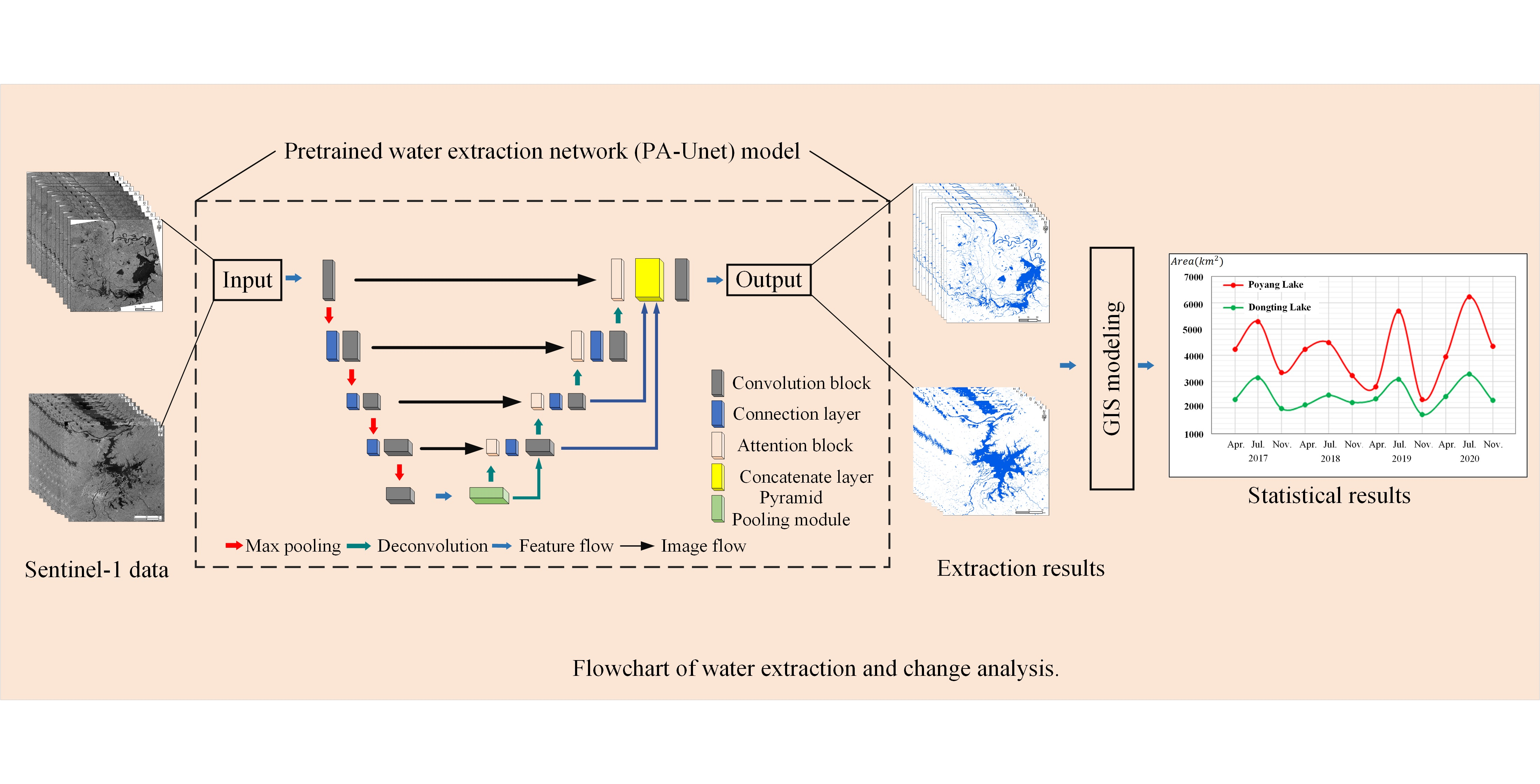
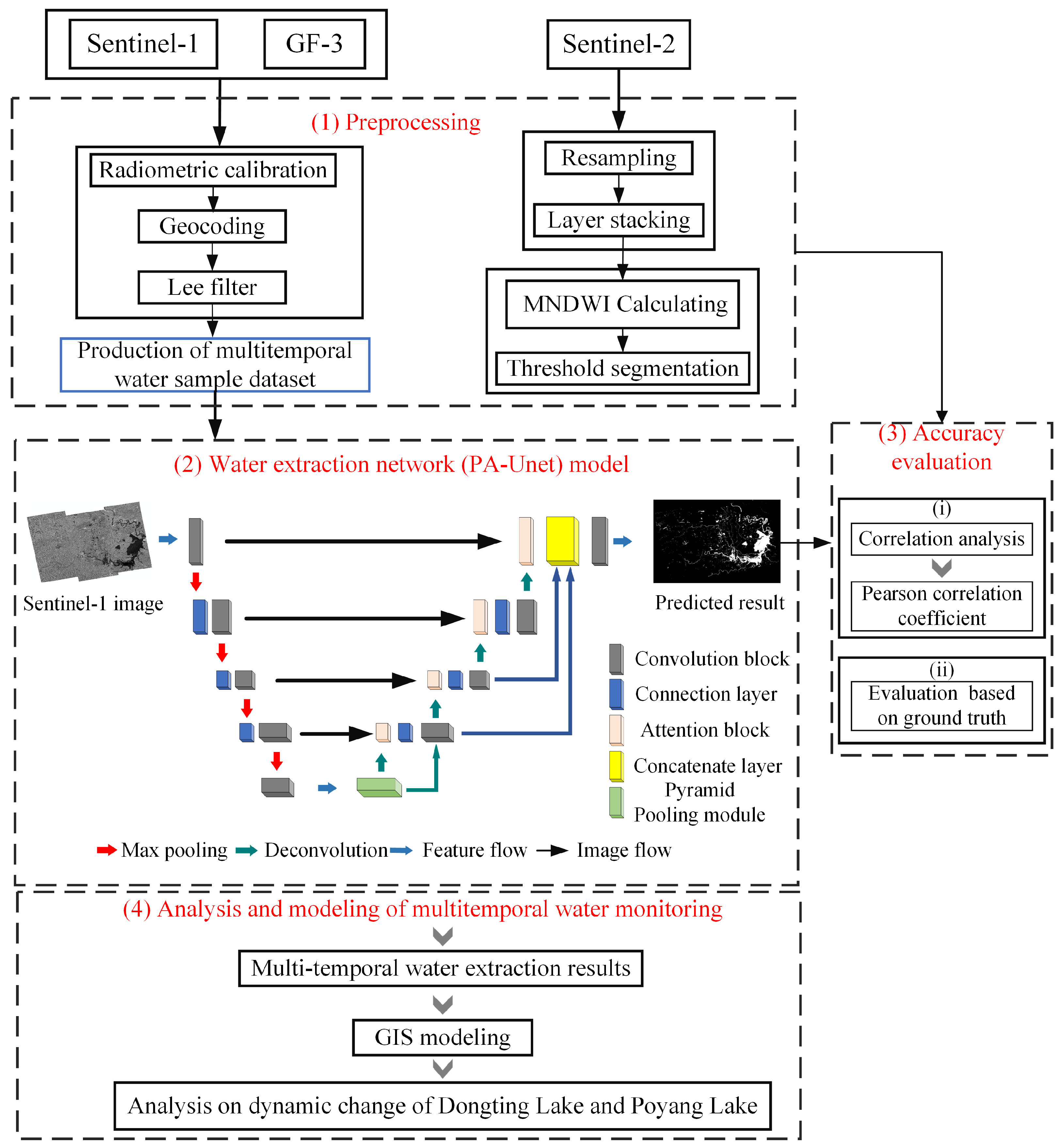
3. Methodology
3.1. Preprocessing
3.1.1. Production of the Multitemporal Water Sample Dataset
3.1.2. Preprocessing of the GF-3 Data
3.1.3. Preprocessing of the Sentinel-2 Optical Data
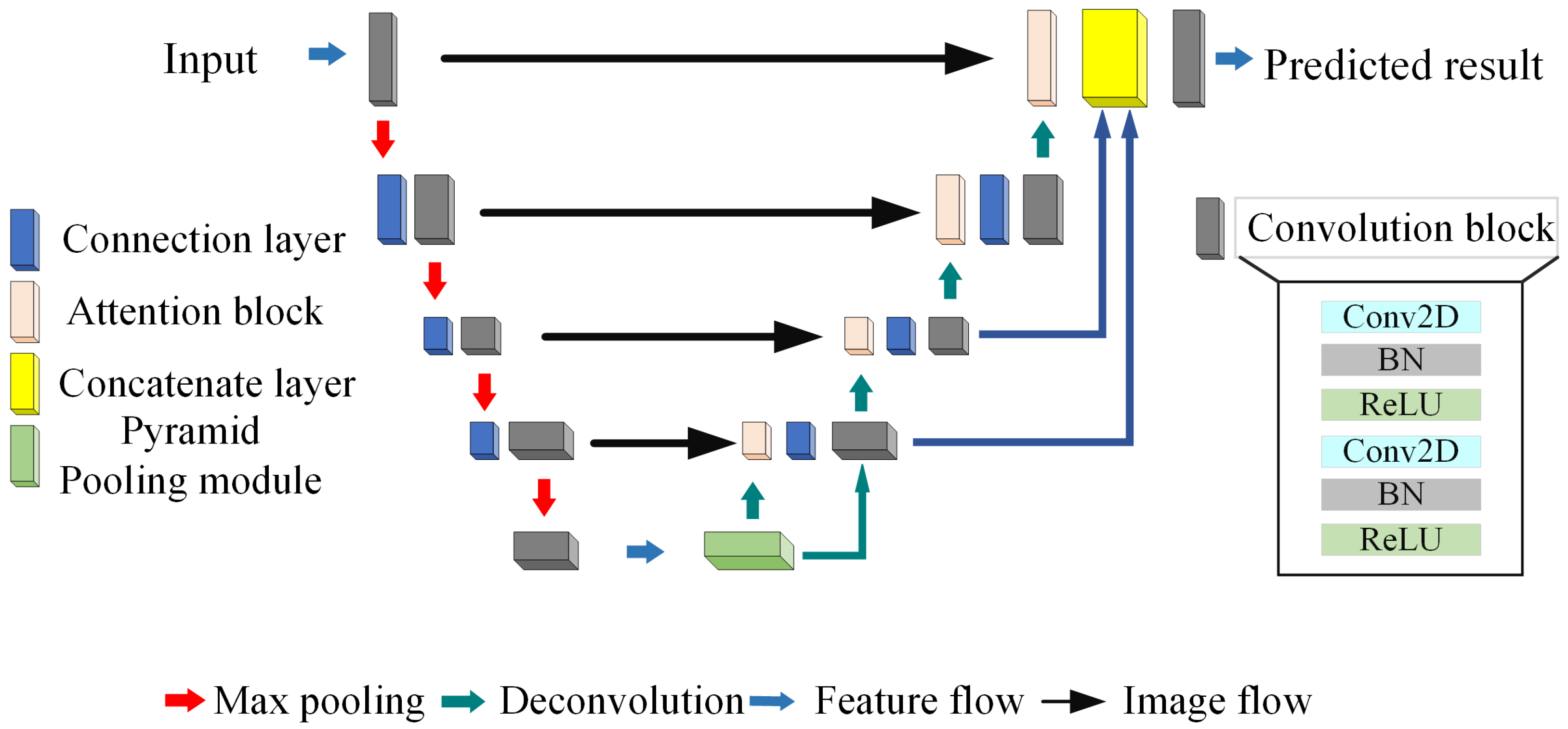
3.2. Construction and Training of the PA-UNet Model
3.2.1. PA-UNet
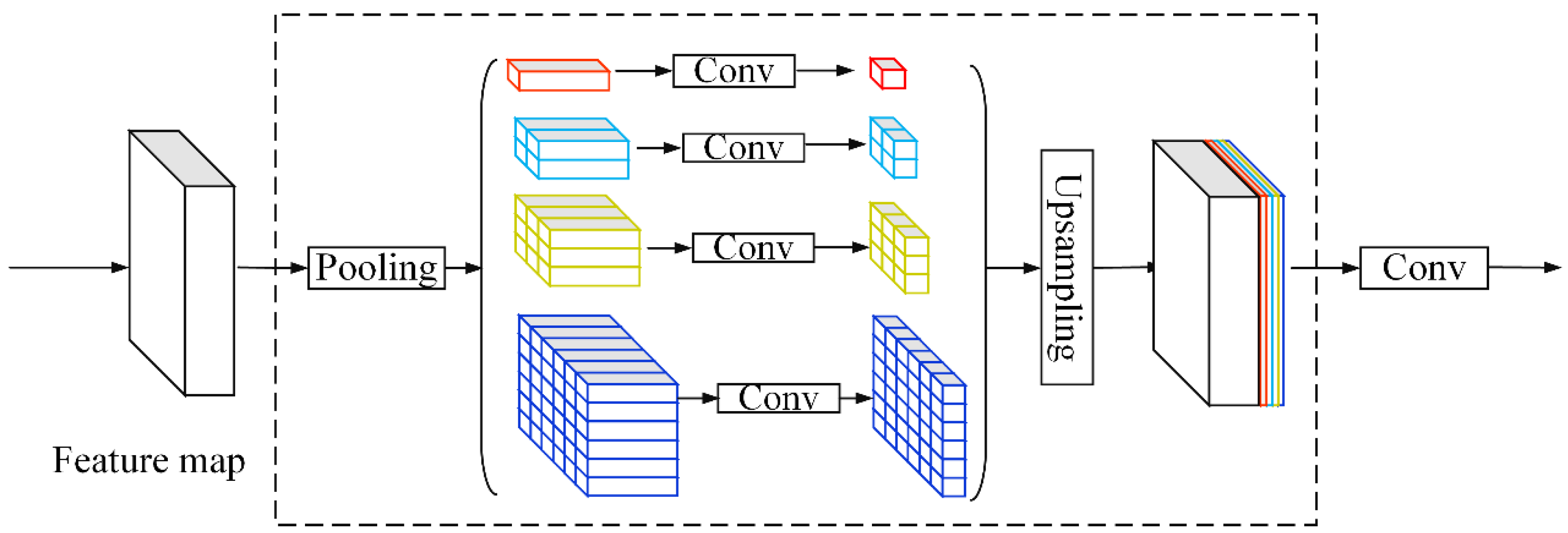
3.2.2. Pyramid Pooling Module
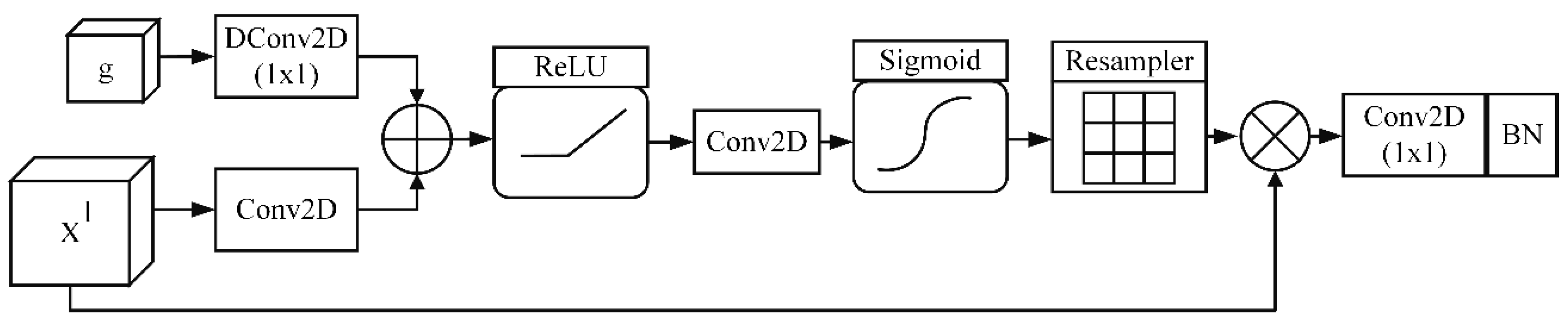
3.2.3. Attention Block
3.2.4. Loss Function
3.3. Accuracy Evaluation
3.4. Multitemporal Water Monitoring Analysis Modeling
4. Experiment Results and Analysis
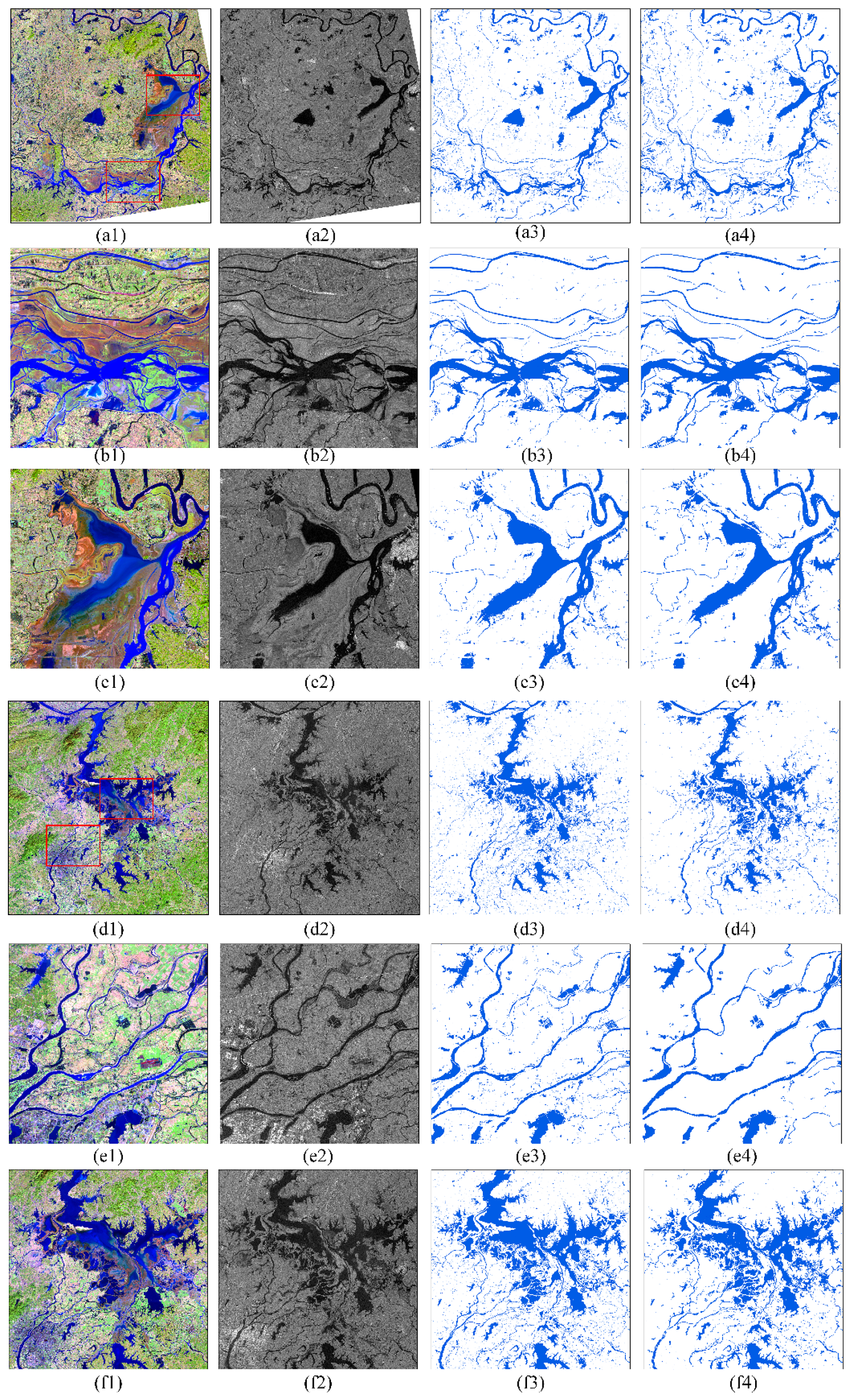
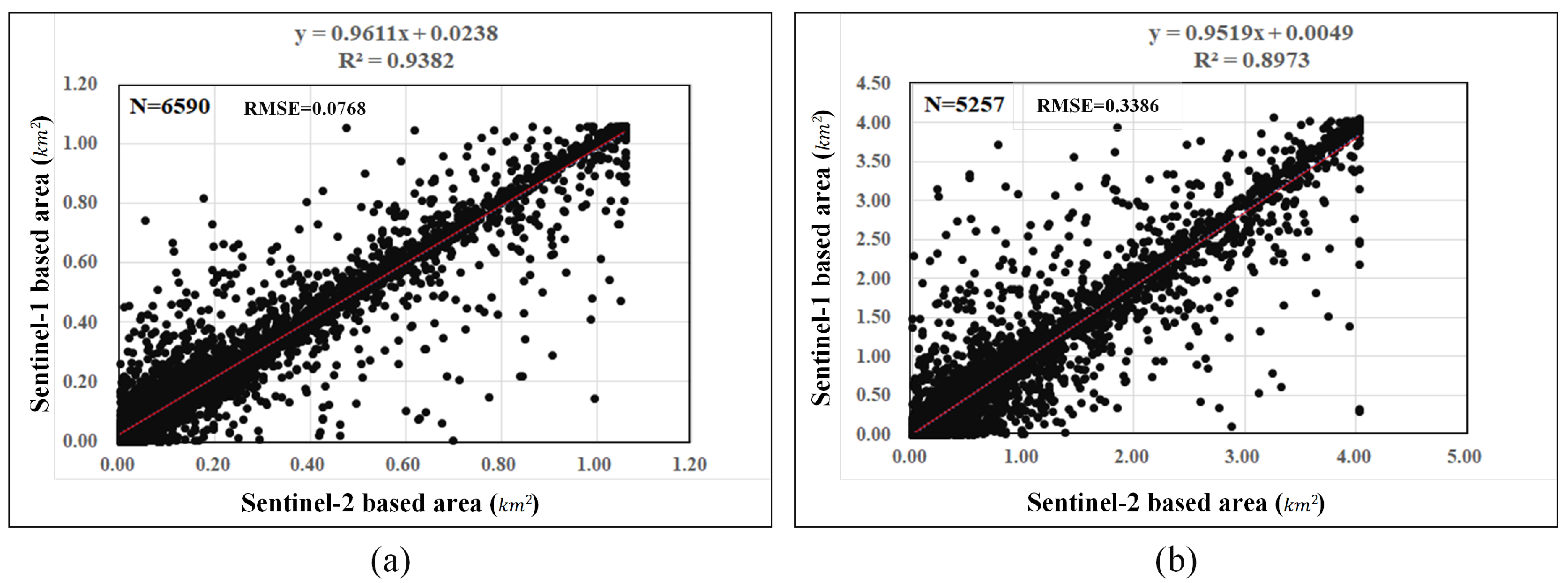
4.1. Accuracy Evaluation
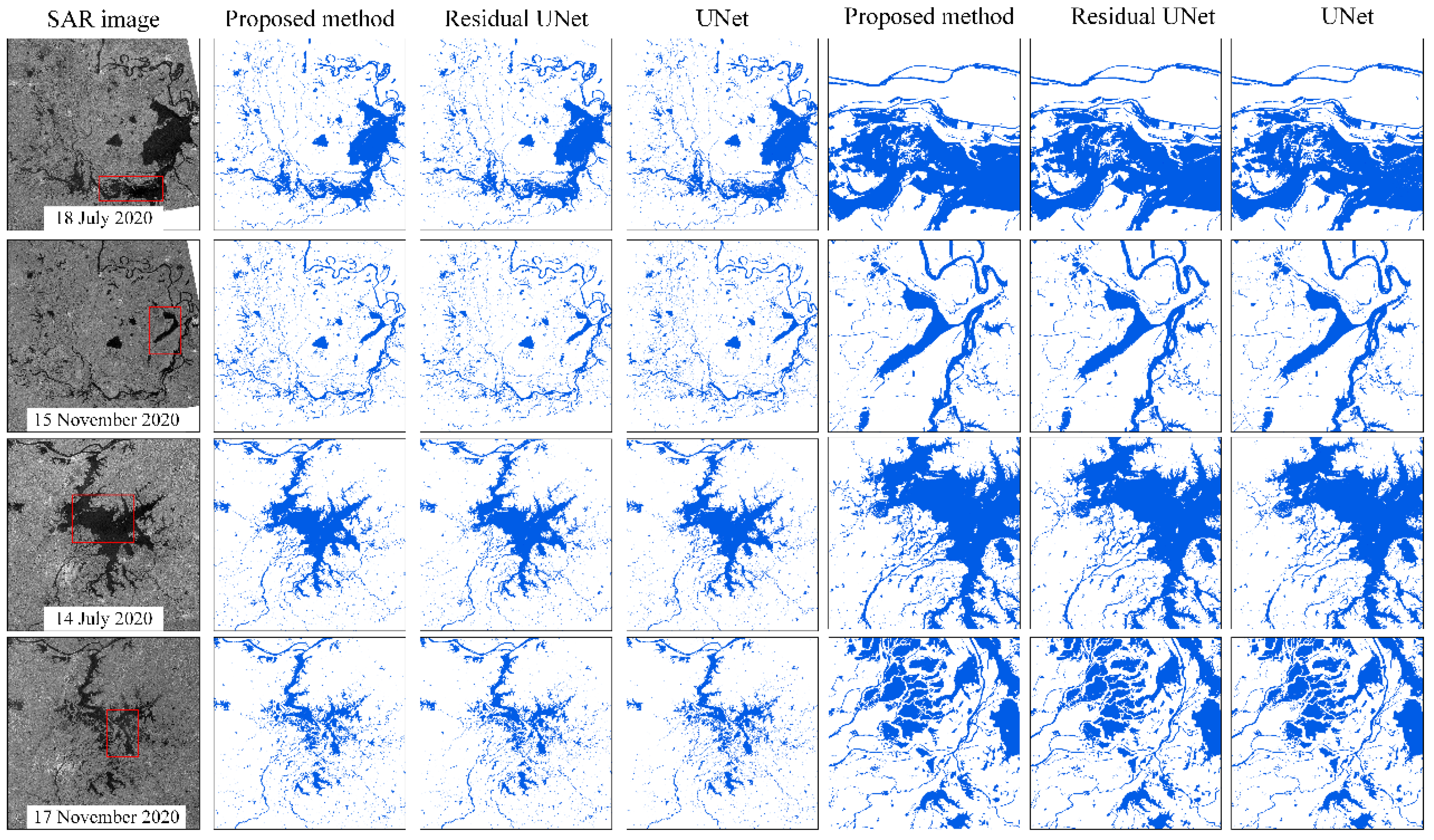
4.2. Comparative Experiment of Different Methods
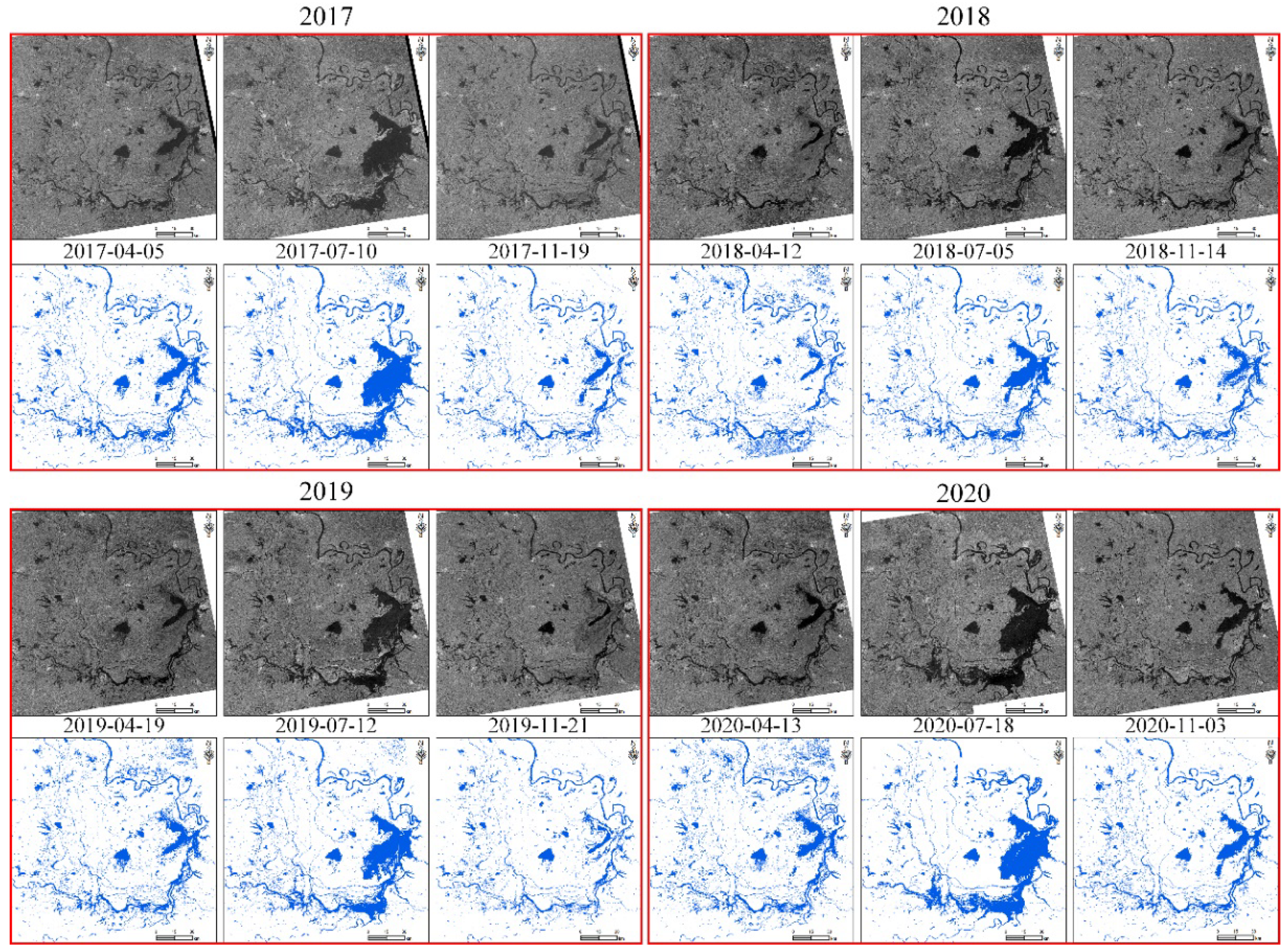
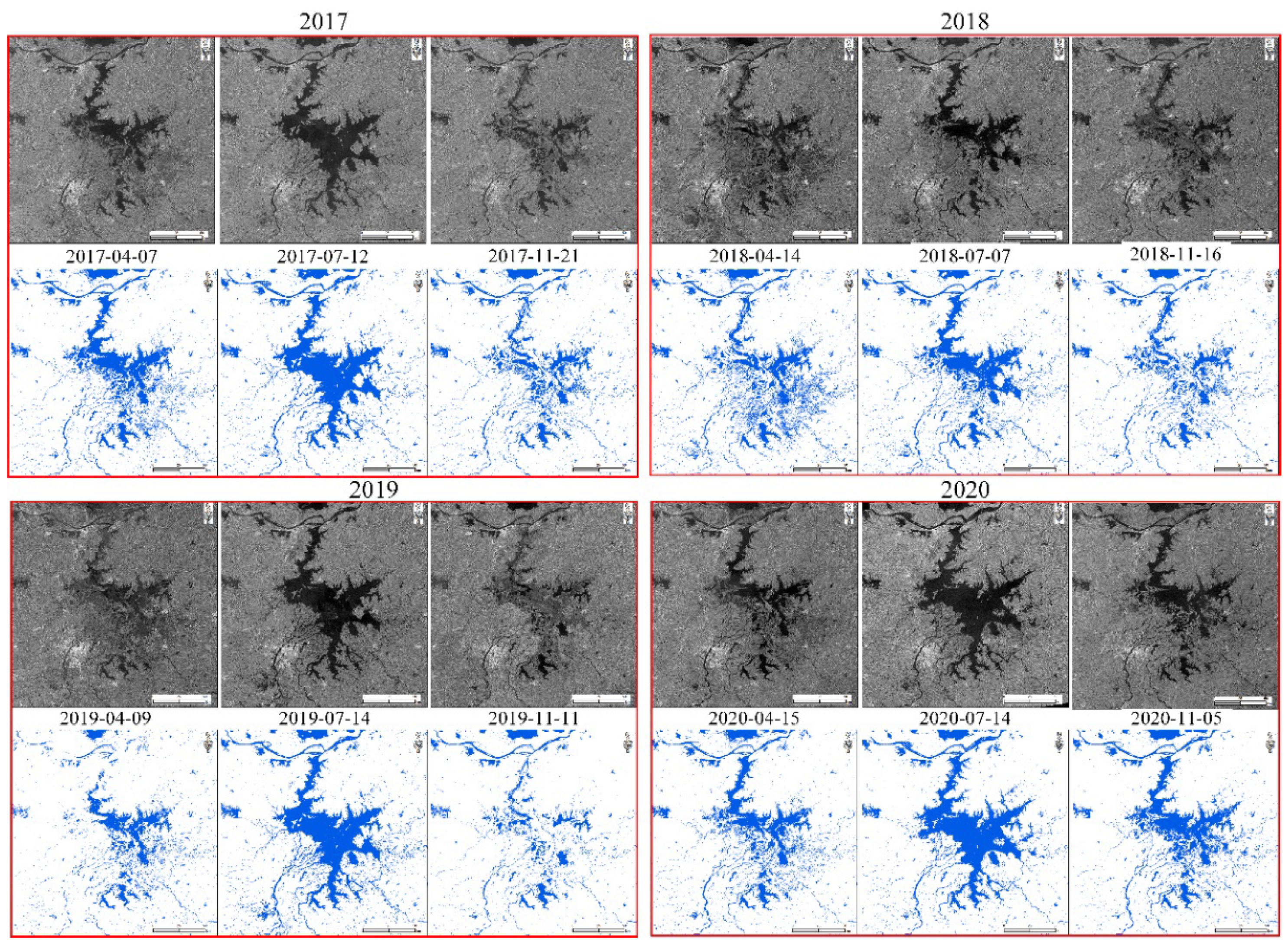
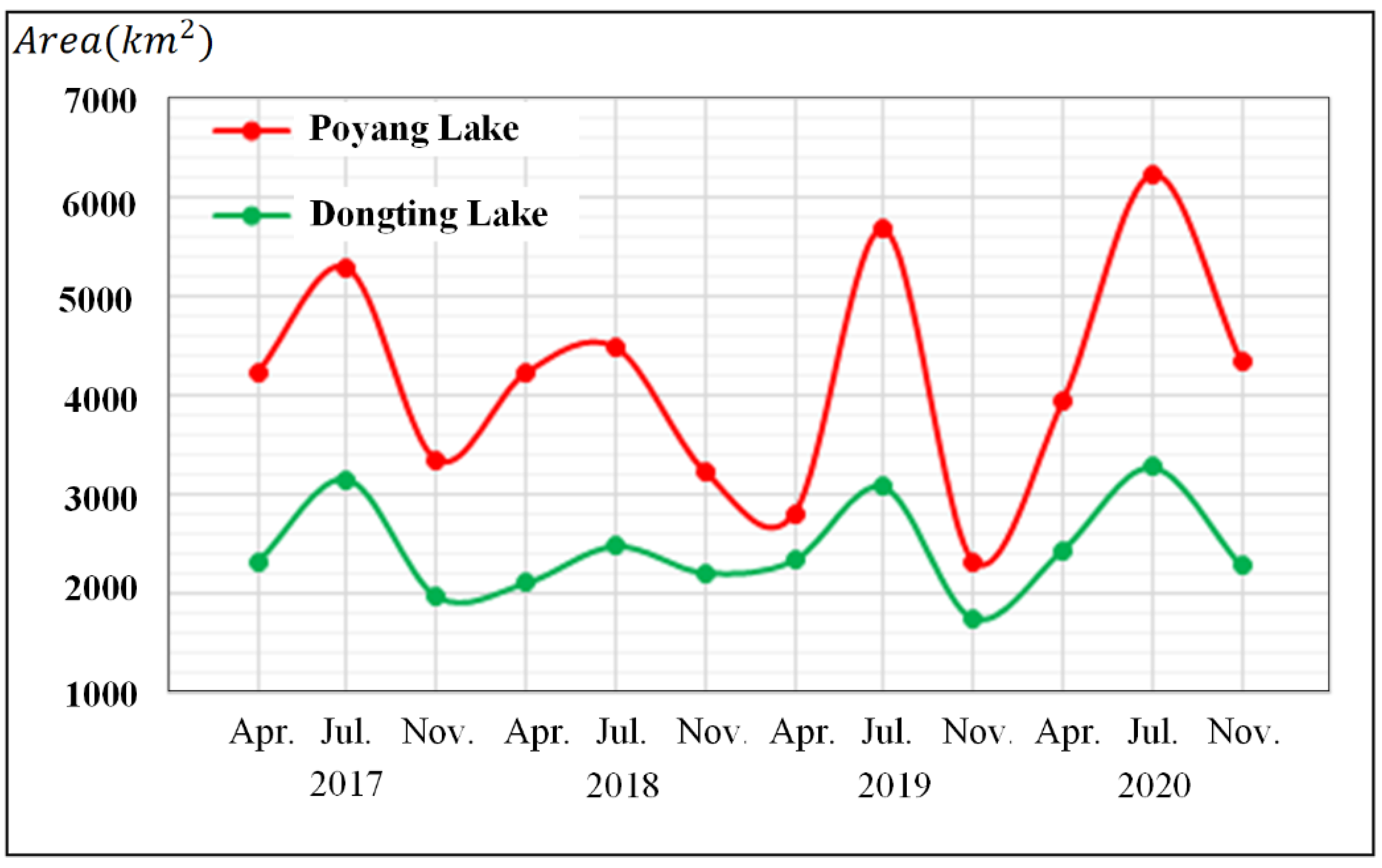
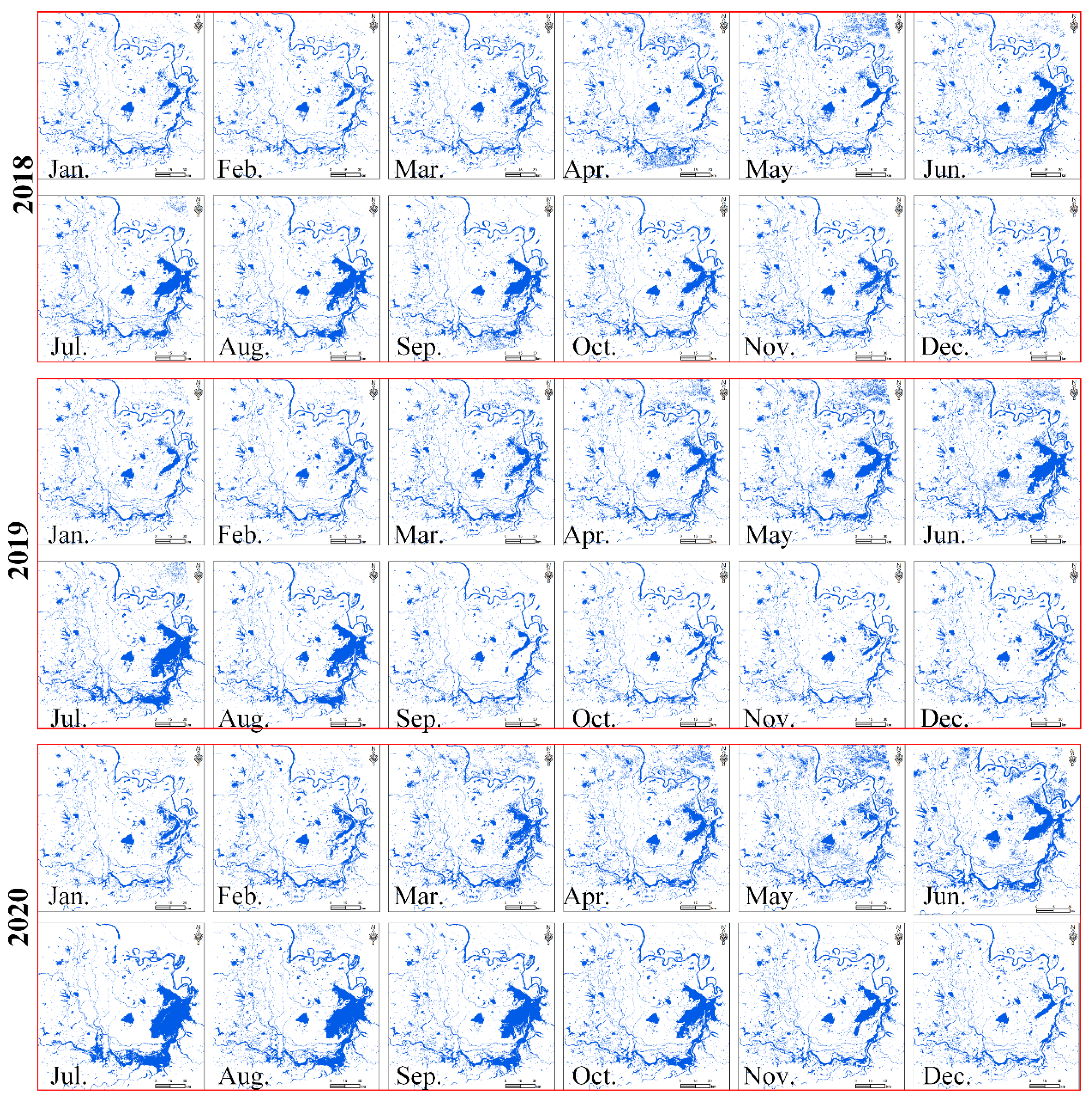
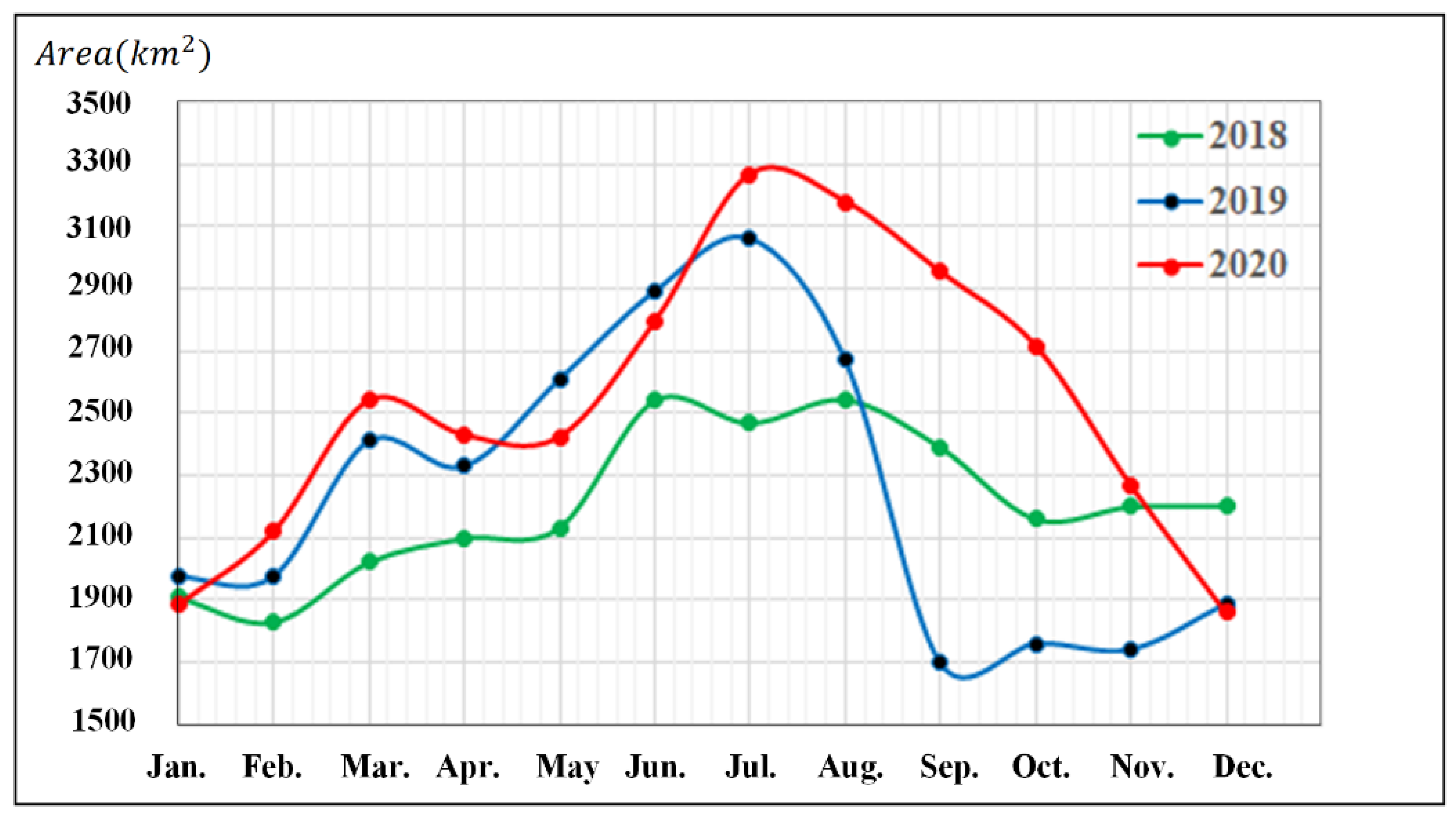
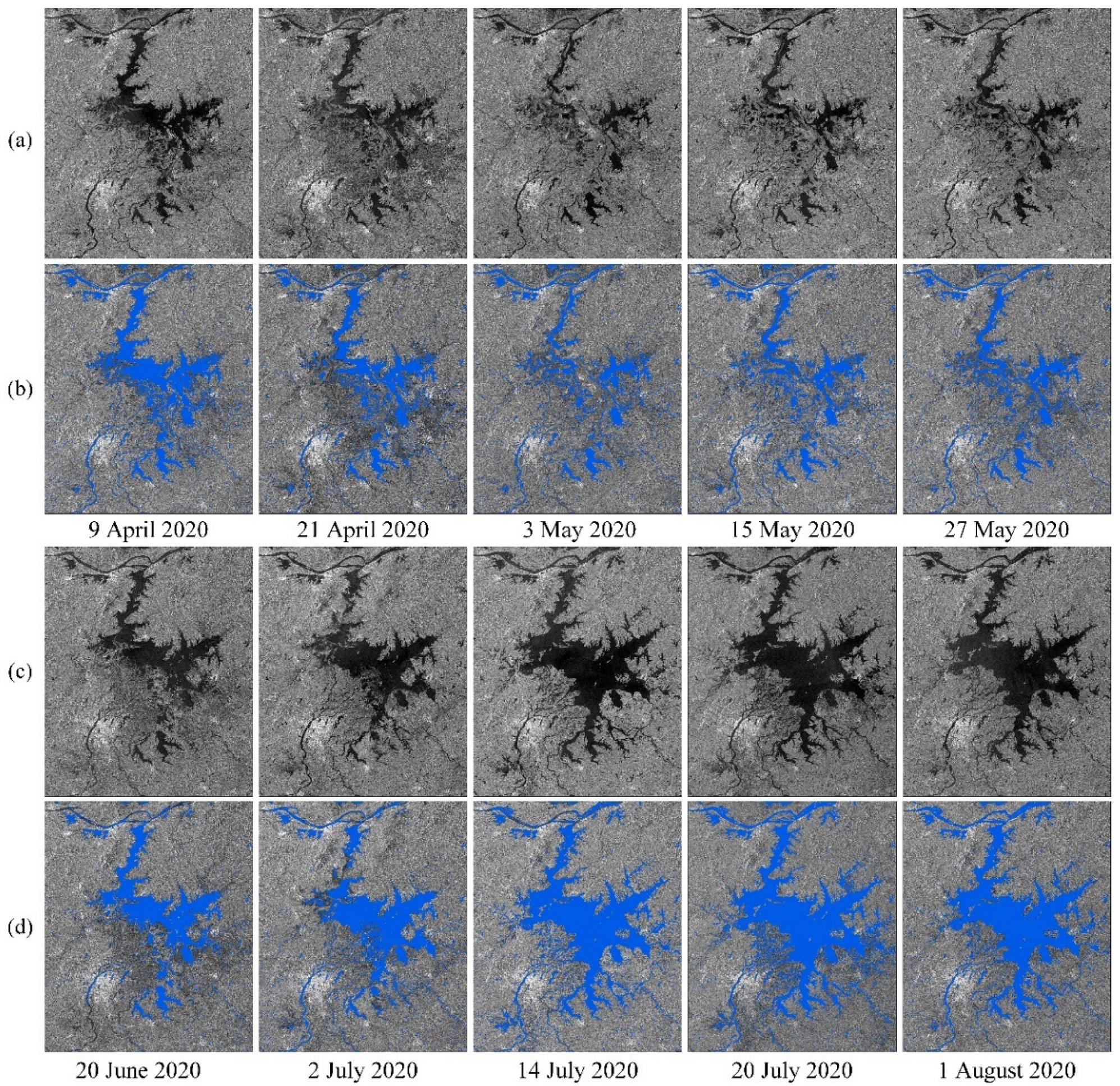
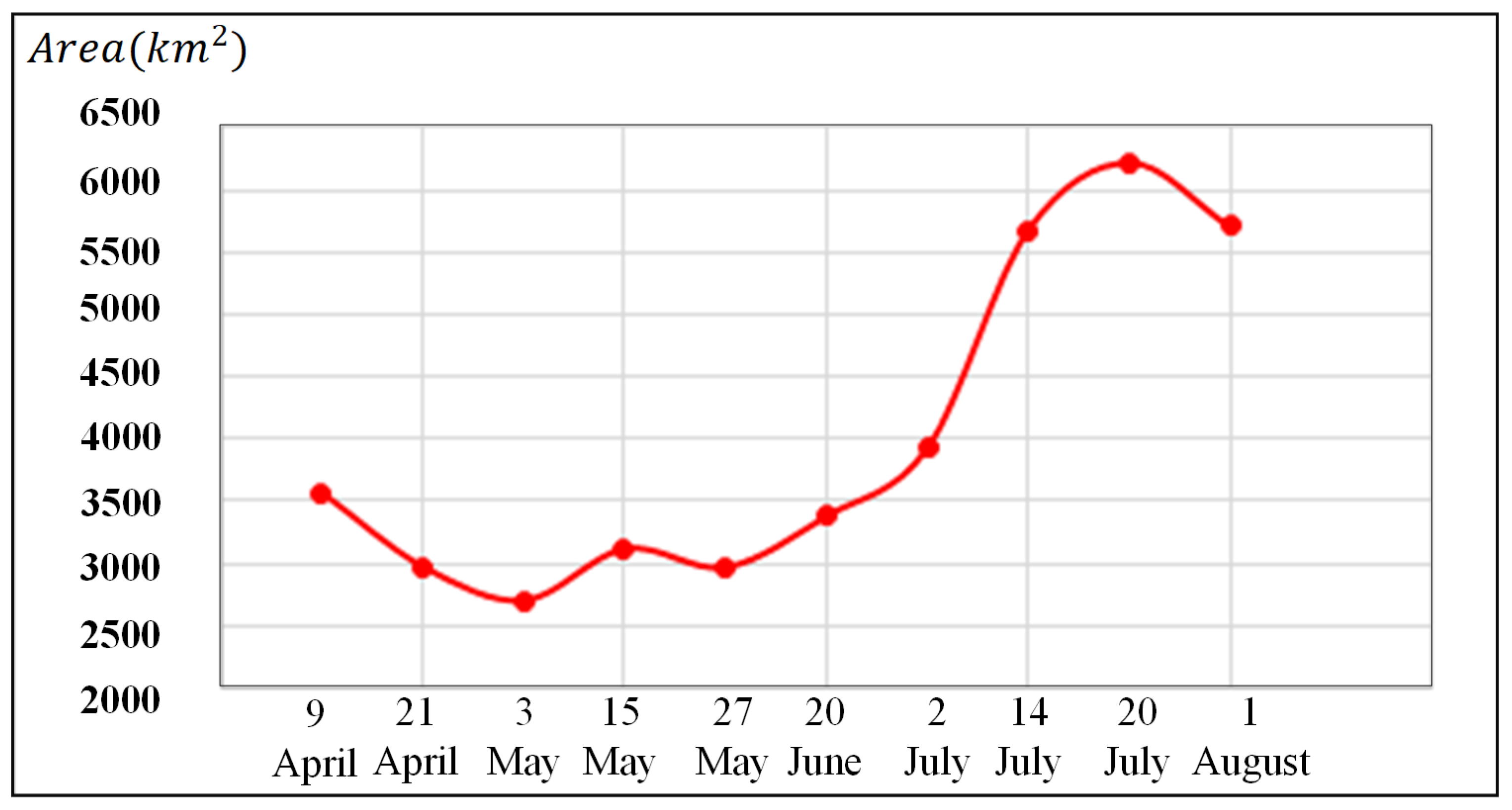
4.3. Multitemporal Dynamic Monitoring in Dongting Lake and Poyang Lake
5. Discussion
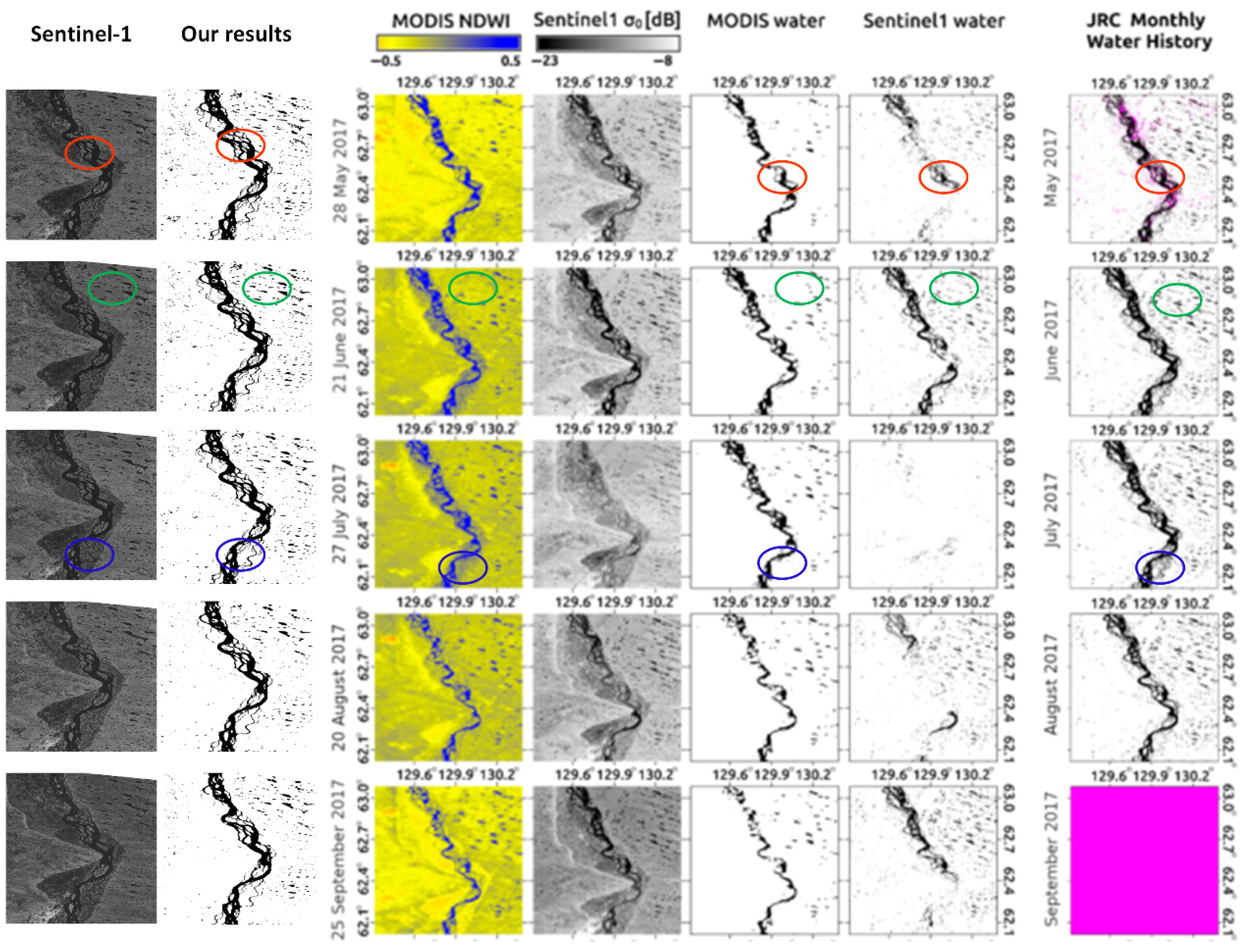
5.1. Comparison to the Previous Work
5.2. The Limitation of PA-UNet Method
5.3. Future Prospects
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huang, P.; Xu, X.; Li, D. Rapid Extraction of Water Area in Poyang Lake Based on Sentinel-1 Satellite Images. Meteorol. Environ. Res. 2019, 10, 55–58. [Google Scholar] [CrossRef]
- Ahamed, A.; Bolten, J.D. A MODIS-based automated flood monitoring system for southeast asia. Int. J. Appl. Earth Obs. Geoinf. 2017, 61, 104–117. [Google Scholar] [CrossRef] [Green Version]
- Chang, H.; Yun, C.; Shiqiang, Z.; Linyi, L.; Kaifang, S.; Rui, L. Surface Water Mapping from Suomi NPP-VIIRS Imagery at 30 m Resolution via Blending with Landsat Data. Remote Sens. 2016, 8, 631. [Google Scholar] [CrossRef] [Green Version]
- Du, Z.; Li, W.; Zhou, D.; Tian, L.; Ling, F.; Wang, H.; Gui, Y.; Sun, B. Analysis of Landsat-8 OLI imagery for land surface water mapping. Remote Sens. Lett. 2014, 5, 672–681. [Google Scholar] [CrossRef]
- Fayne, J.V.; Bolten, J.D.; Doyle, C.S.; Fuhrmann, S.; Rice, M.T.; Houser, P.R.; Lakshmi, V. Flood mapping in the lower Mekong River Basin using daily MODIS observations. Int. J. Remote Sens. 2017, 38, 1737–1757. [Google Scholar] [CrossRef]
- Ji, L.; Geng, X.; Sun, K.; Zhao, Y.; Gong, P. Target Detection Method for Water Mapping Using Landsat 8 OLI/TIRS Imagery. Water 2015, 7, 794–817. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Sun, D.; Goldberg, M.D.; Sjoberg, B.; Santek, D.; Hoffman, J.P.; Deweese, M.; Restrepo, P.; Lindsey, S.; Holloway, E. Automatic near real-time flood detection using Suomi-NPP/VIIRS data. Remote Sens. Environ. 2018, 204, 672–689. [Google Scholar] [CrossRef]
- Yang, X.; Zhao, S.; Qin, X.; Zhao, N.; Liang, L. Mapping of Urban Surface Water Bodies from Sentinel-2 MSI Imagery at 10 m Resolution via NDWI-Based Image Sharpening. Remote Sens. 2017, 9, 596. [Google Scholar] [CrossRef] [Green Version]
- Kobayashi, T.; Satake, M.; Masuko, H.; Manabe, T.; Shimada, M. CRL/NASDA airborne dual-frequency polarimetric interferometric SAR system. In Proceedings of the SPIE—The International Society for Optical Engineering, San Jose, CA, USA, 26–28 January 1998. [Google Scholar]
- Li, J.; Wang, S. An automatic method for mapping inland surface waterbodies with Radarsat-2 imagery. Int. J. Remote Sens. 2015, 36, 1367–1384. [Google Scholar] [CrossRef]
- ARII, M. Sensitivity Study of ALOS-2 Data to Floodwaters in Joso City in 2015 and its Application. J. Remote Sens. Soc. Jpn. 2018, 38, 325–336. [Google Scholar]
- Pulvirenti, L.; Pierdicca, N.; Boni, G.; Fiorini, M.; Rudari, R. Flood Damage Assessment Through Multitemporal COSMO-SkyMed Data and Hydrodynamic Models: The Albania 2010 Case Study. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2848–2855. [Google Scholar] [CrossRef]
- Kuenzer, C.; Guo, H.; Huth, J.; Leinenkugel, P.; Li, X.; Dech, S. Flood Mapping and Flood Dynamics of the Mekong Delta: ENVISAT-ASAR-WSM Based Time Series Analyses. Remote Sens. 2013, 5, 687–715. [Google Scholar] [CrossRef] [Green Version]
- Katherine, I.; Alexander, B.; Georgia, F.; Achim, R.; Birgit, W. Assessing Single-Polarization and Dual-Polarization TerraSAR-X Data for Surface Water Monitoring. Remote Sens. 2018, 10, 949. [Google Scholar] [CrossRef] [Green Version]
- Hu, S.; Qin, J.; Ren, J.; Zhao, H.; Hong, H. Automatic Extraction of Water Inundation Areas Using Sentinel-1 Data for Large Plain Areas. Remote Sens. 2020, 12, 243. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Niu, Z.; Xu, Z.; Yan, X. Construction of High Spatial-Temporal Water Body Dataset in China Based on Sentinel-1 Archives and GEE. Remote Sens. 2020, 12, 2413. [Google Scholar] [CrossRef]
- Possa, E.M.; Maillard, P. Precise Delineation of Small Water Bodies from Sentinel-1 Data using Support Vector Machine Classification. Can. J. Remote Sens. 2018, 44, 1–12. [Google Scholar] [CrossRef]
- Tang, D.; Wang, F.; Xiang, Y.; You, H.; Kang, W. Automatic Water Detection Method in Flooding Area for GF-3 Single-Polarization Data. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 5266–5269. [Google Scholar] [CrossRef]
- Bioresita, F.; Puissant, A.; Stumpf, A.; Malet, J.P. A Method for Automatic and Rapid Mapping of Water Surfaces from Sentinel-1 Imagery. Remote Sens. 2018, 10, 217. [Google Scholar] [CrossRef] [Green Version]
- Clement, M.A.; Kilsby, C.G.; Moore, P. Multi-temporal synthetic aperture radar flood mapping using change detection. J. Flood Risk Manag. 2018, 11, 152–168. [Google Scholar] [CrossRef]
- Lv, W.; Yu, Q.; Yu, W. Water extraction in SAR images using GLCM and Support vector Machine. In Proceedings of the IEEE International Conference on Signal Processing, Beijing, China, 24–28 October 2010; pp. 740–743. [Google Scholar] [CrossRef]
- Quang, N.; Tuan, V.; Le, H.; Anh, N.; The, D.; Dieu, D.; Nguyen, M.H.; Hackney, C. Hydrological/Hydraulic Modeling-Based Thresholding of Multi SAR Remote Sensing Data for Flood Monitoring in Regions of the Vietnamese Lower Mekong River Basin. Water 2019, 12, 71. [Google Scholar] [CrossRef] [Green Version]
- Tsyganskaya, V.; Martinis, S.; Marzahn, P. Flood Monitoring in Vegetated Areas Using Multitemporal Sentinel-1 Data: Impact of Time Series Features. Water 2019, 11, 1938. [Google Scholar] [CrossRef] [Green Version]
- Zhou, S.; Kan, P.; Silbernagel, J.; Jin, J. Application of Image Segmentation in Surface Water Extraction of Freshwater Lakes using Radar Data. ISPRS Int. J. Geo-Inf. 2020, 9, 424. [Google Scholar] [CrossRef]
- Chapman, B.; McDonald, K.; Shimada, M.; Rosenqvist, A.; Schroeder, R.; Hess, L. Mapping Regional Inundation with Spaceborne L-Band SAR. Remote Sens. 2015, 7, 5440–5470. [Google Scholar] [CrossRef] [Green Version]
- Martinis, S.; Twele, A.; Voigt, S. Unsupervised Extraction of Flood-Induced Backscatter Changes in SAR Data Using Markov Image Modeling on Irregular Graphs. IEEE Trans. Geosci. Remote Sens. 2011, 49, 251–263. [Google Scholar] [CrossRef]
- Oberstadler, R.; Honsch, H.; Huth, D. Assessment of the Mapping Capabilities of ERS-1 SAR Data for Flood Mapping: A Case Study in Germany. Hydrol. Proc. 1997, 11, 1415–1425. [Google Scholar] [CrossRef]
- De Roo, A.; Van Der Knijff, J.; Horritt, M.; Schmuck, G.; De Jong, S. Assessing flood damages of the 1997 Oder flood and the 1995 Meuse flood. In Proceedings of the Second International ITC Symposium on Operationalization of Remote Sensing, Enschede, The Netherlands, 16–20 August 1999. [Google Scholar]
- Evans, T.; Costa, M.; Telmer, K.; Silva, T. Using ALOS/PALSAR and RADARSAT-2 to map land cover and seasonal inundation in the Brazilian Pantanal. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 3, 560–575. [Google Scholar] [CrossRef]
- Simon, R.; Tormos, T.; Danis, P.-A. Geographic object based image analysis using very high spatial and temporal resolution radar and optical imagery in tracking water level fluctuations in a freshwater reservoir. South-East. Eur. J. Earth Obs. Geomat. 2014, 3, 287. [Google Scholar]
- Schumann, G.; Henry, J.; Hoffmann, L.; Pfister, L.; Pappenberger, F.; Matgen, P. Demonstrating the high potential of remote sensing in hydraulic modelling and flood risk management. In Proceedings of the Annual Conference of the Remote Sensing and Photogrammetry Society with the NERC Earth Observation Conference, Portsmouth, UK, 6–9 September 2005. [Google Scholar]
- Matgen, P.; Schumann, G.; Henry, J.-B.; Hoffmann, L.; Pfister, L. Integration of SAR-derived river inundation areas, high-precision topographic data and a river flow model toward near real-time flood management. Int. J. Appl. Earth Obs. Geoinf. 2007, 9, 247–263. [Google Scholar] [CrossRef]
- Benoudjit, A.; Guida, R. A Novel Fully Automated Mapping of the Flood Extent on SAR Images Using a Supervised Classifier. Remote Sens. 2019, 11, 779. [Google Scholar] [CrossRef] [Green Version]
- Martinis, S.; Kuenzer, C.; Wendleder, A.; Huth, J.; Dech, S. Comparing four operational sar-based water and flood detection approaches. Int. J. Remote Sens. 2015, 36, 3519–3543. [Google Scholar] [CrossRef]
- Mason, D.; Giustarini, L.; Garcia-Pintado, J.; Cloke, H. Detection of flooded urban areas in high resolution Synthetic Aperture Radar images using double scattering. Int. J. Appl. Earth Obs. Geoinf. 2014, 28, 150–159. [Google Scholar] [CrossRef] [Green Version]
- Pulvirenti, L.; Chini, M.; Pierdicca, N.; Boni, G. Use of SAR Data for Detecting Floodwater in Urban and Agricultural Areas: The Role of the Interferometric Coherence. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1532–1544. [Google Scholar] [CrossRef]
- Chaabani, C.; Chini, M.; Abdelfattah, R.; Hostache, R.; Chokmani, K. Flood Mapping in a Complex Environment Using Bistatic TanDEM-X/TerraSAR-X InSAR Coherence. Remote Sens. 2018, 10, 1873. [Google Scholar] [CrossRef] [Green Version]
- Chini, M.; Pelich, R.; Pulvirenti, L.; Pierdicca, N.; Hostache, R.; Matgen, P. Sentinel-1 InSAR Coherence to Detect Floodwater in Urban Areas: Houston and Hurricane Harvey as A Test Case. Remote Sens. 2019, 11, 107. [Google Scholar] [CrossRef] [Green Version]
- Pierdicca, N.; Pulvirenti, L.; Boni, G.; Squicciarino, G.; Chini, M. Mapping Flooded Vegetation Using COSMO-SkyMed: Comparison With Polarimetric and Optical Data Over Rice Fields. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2650–2662. [Google Scholar] [CrossRef]
- Grimaldi, S.; Xu, J.; Li, Y.; Pauwels, V.R.; Walker, J.P. Flood mapping under vegetation using single SAR acquisitions. Remote Sens. Environ. 2020, 237, 111582. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, L.; Li, Z.; Xing, J.; Xing, X.; Yuan, Z. Automatic Extraction of Water and Shadow from SAR Images Based on a Multi-Resolution Dense Encoder and Decoder Network. Sensors 2019, 19, 3576. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, L.; Cui, X.; Li, Z.; Zhihui, Y.; Xing, J.; Xing, X.; Jia, Z. A New Deep Learning Algorithm for SAR Scene Classification Based on Spatial Statistical Modeling and Features Re-Calibration. Sensors 2019, 19, 2479. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, H.; Chen, Z.; Jiang, H.; Jing, W.; Sun, L.; Feng, M. Evaluation of Three Deep Learning Models for Early Crop Classification Using Sentinel-1A Imagery Time Series—A Case Study in Zhanjiang, China. Remote Sens. 2019, 11, 2673. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Kong, Q.; Zhang, C.; You, S.; Wei, H.; Sun, R.; Li, L. A new road extraction method using Sentinel-1 SAR images based on the deep fully convolutional neural network. Eur. J. Remote Sens. 2019, 52, 572–582. [Google Scholar] [CrossRef] [Green Version]
- Magdy, H.; Yin, X.-C. Change Detection in SAR Images Based on Deep Learning. Int. J. Aeronaut. Space Sci. 2019, 21, 1–11. [Google Scholar] [CrossRef]
- Li, Y.; Martinis, S.; Wieland, M. Urban flood mapping with an active self-learning convolutional neural network based on TerraSAR-X intensity and interferometric coherence. ISPRS J. Photogramm. Remote Sens. 2019, 152, 178–191. [Google Scholar] [CrossRef]
- Kang, W.; Xiang, Y.; Wang, F.; Wan, L.; You, H. Flood Detection in Gaofen-3 SAR Images via Fully Convolutional Networks. Sensors 2018, 18, 2915. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nemni, E.; Bullock, J.; Belabbes, S.; Bromley, L. Fully Convolutional Neural Network for Rapid Flood Segmentation in Synthetic Aperture Radar Imagery. Remote Sens. 2020, 12, 2532. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Medical Image Computing and Computer-Assisted Intervention; Navab, N., Hornegger, J., Wells, W., Frangi, A., Eds.; MICCAI 2015. Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2015; Volume 9351. [Google Scholar]
- Bullock, J.; Cuesta-Lázaro, C.; Quera-Bofarull, A. XNet: A convolutional neural network (CNN) implementation for medical x-ray image segmentation suitable for small datasets. In Medical Imaging 2019: Biomedical Applications in Molecular, Structural, and Functional Imaging; Gimi, B., Krol, A., Eds.; International Society for Optics and Photonics: Bellingham, WA, USA, 2019; Volume 10953, pp. 453–463. [Google Scholar]
- Chen, L.; Zhang, P.; Xing, J.; Li, Z.; Xing, X.; Zhihui, Y. A Multi-scale Deep Neural Network for Water Detection from SAR Images in the Mountainous Areas. Remote Sens. 2020, 12, 3205. [Google Scholar] [CrossRef]
- Woo, S.; Park, J.; Lee, J.-Y.; Kweon, I. CBAM: Convolutional Block Attention Module. In Proceedings of the 2018 European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; Volume 11211, ISBN 978-3-030-01233-5. [Google Scholar]
- Zhao, H.; Shi, J.; Qi, X.; Wang, X.; Jia, J. Pyramid Scene Parsing Network. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Cao, H.; Zhang, H.; Wang, C.; Zhang, b. Operational Flood Detection Using Sentinel-1 SAR Data over Large Areas. Water 2019, 11, 786. [Google Scholar] [CrossRef] [Green Version]
- User Manual of Gaofen-3 Satellite Products; China Centre for Resources Satellite Data and Application: Beijing, China, 2017.
- Hanqiu, X.U. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Milletari, F.; Navab, N.; Ahmadi, S.A. V-Net: Fully Convolutional Neural Networks for Volumetric Medical Image Segmentation. In Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016; pp. 565–571. [Google Scholar] [CrossRef] [Green Version]
- Simon, P. Including Omission Mistakes in the Calculation of Cohen’s Kappa and an Analysis of the Coefficient’s Paradox Features. Educ. Psychol. Meas. 2006, 66, 765–777. [Google Scholar] [CrossRef]
- Mizuochi, H.; Iijima, Y.; Nagano, H.; Kotani, A.; Hiyama, T. Dynamic Mapping of Subarctic Surface Water by Fusion of Microwave and Optical Satellite Data Using Conditional Adversarial Networks. Remote Sens. 2021, 13, 175. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dongting Lake | |||||||
| No. | Acquisition time | No. | Acquisition time | No. | Acquisition time | No. | Acquisition time |
| 1 | 5 April 2017 | 11 | 7 August 2018 | 21 | 6 June 2019 | 31 | 13 April 2020 |
| 2 | 10 July 2017 | 12 | 3 September 2018 | 22 | 12 July 2019 | 32 | 7 May 2020 |
| 3 | 19 November 2017 | 13 | 9 October 2018 | 23 | 5 August 2019 | 33 | 11 June 2020 |
| 4 | 6 January 2018 | 14 | 14 November 2018 | 24 | 10 September 2019 | 34 | 18 July 2020 |
| 5 | 11 February 2018 | 15 | 8 December 2018 | 25 | 4 October 2019 | 35 | 11 August 2020 |
| 6 | 7 March 2018 | 16 | 1 January 2019 | 26 | 21 November 2019 | 36 | 4 September 2020 |
| 7 | 12 April 2018 | 17 | 6 February 2019 | 27 | 3 December 2019 | 37 | 10 October 2020 |
| 8 | 6 May 2018 | 18 | 2 March 2019 | 28 | 8 January 2020 | 38 | 3 November 2020 |
| 9 | 11 June 2018 | 19 | 19 April 2019 | 29 | 1 February 2020 | 39 | 8 December 2020 |
| 10 | 7 July 2018 | 20 | 1 May 2019 | 30 | 8 March 2020 | ||
| Poyang Lake | |||||||
| No. | Acquisition time | No. | Acquisition time | No. | Acquisition time | No. | Acquisition time |
| 1 | 7 April 2017 | 11 | 16 November 2018 | 21 | 15 April 2020 | 31 | 2 July 2020 |
| 2 | 7 April 2017 | 12 | 16 November 2018 | 22 | 15 April 2020 | 32 | 2 July 2020 |
| 3 | 12 July 2017 | 13 | 9 April 2019 | 23 | 21 April 2020 | 33 | 14 July 2020 |
| 4 | 12 July 2017 | 14 | 9 April 2019 | 24 | 21 April 2020 | 34 | 20 July 2020 |
| 5 | 21 November 2017 | 15 | 14 July 2019 | 25 | 3 May 2020 | 35 | 20 July 2020 |
| 6 | 21 November 2017 | 16 | 14 July 2019 | 26 | 3 May 2020 | 36 | 1 August 2020 |
| 7 | 14 April 2018 | 17 | 11 November 2019 | 27 | 27 May 2020 | 37 | 1 August 2020 |
| 8 | 14 April 2018 | 18 | 11 November 2019 | 28 | 27 May 2020 | 38 | 5 November 2020 |
| 9 | 7 July 2018 | 19 | 9 April 2020 | 29 | 20 June 2020 | 39 | 5 November 2020 |
| 10 | 7 July 2018 | 20 | 9 April 2020 | 30 | 20 June 2020 | ||
| Area | No. | Data | Resolution | Acquisition Time |
|---|---|---|---|---|
| Dongting Lake | 1 | GF-3 | 10 | 4 June 2020 |
| 2 | GF-3 | 10 | 4 June 2020 | |
| 3 | GF-3 | 10 | 9 June 2020 | |
| Dongting Lake | 4 | Sentinel-2 | 10 | 15 November 2020 |
| 5 | Sentinel-2 | 10 | 15 November 2020 | |
| 6 | Sentinel-2 | 10 | 12 November 2020 | |
| 7 | Sentinel-2 | 10 | 12 November 2020 | |
| Poyang Lake | 8 | Sentinel-2 | 10 | 13 November 2020 |
| 9 | Sentinel-2 | 10 | 13 November 2020 |
| Acquisition Time | Methods | Kappa | OA (%) | OE (%) | CE (%) |
|---|---|---|---|---|---|
| 18 July 2020 | PA-UNet | 0.96 | 98.42 | 0.38 | 0.23 |
| Residual UNet | 0.92 | 96.16 | 0.64 | 0.81 | |
| UNet | 0.89 | 93.31 | 2.49 | 0.28 | |
| 15 November 2020 | PA-UNet | 0.94 | 96.38 | 1.11 | 1.71 |
| Residual UNet | 0.93 | 95.32 | 3.10 | 2.74 | |
| U-Net | 0.89 | 94.38 | 4.52 | 0.81 | |
| 14 July 2020 | PA-UNet | 0.95 | 98.05 | 0.69 | 2.56 |
| Residual UNet | 0.93 | 97.41 | 0.73 | 2.31 | |
| UNet | 0.86 | 92.15 | 4.12 | 0.89 | |
| 17 November 2020 | PA-UNet | 0.94 | 97.30 | 0.12 | 2.15 |
| Residual UNet | 0.91 | 94.16 | 3.10 | 0.81 | |
| UNet | 0.89 | 93.31 | 7.56 | 0.36 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Wang, C.; Xu, L.; Wu, F.; Zhang, H.; Zhang, B. Multitemporal Water Extraction of Dongting Lake and Poyang Lake Based on an Automatic Water Extraction and Dynamic Monitoring Framework. Remote Sens. 2021, 13, 865. https://doi.org/10.3390/rs13050865
Li J, Wang C, Xu L, Wu F, Zhang H, Zhang B. Multitemporal Water Extraction of Dongting Lake and Poyang Lake Based on an Automatic Water Extraction and Dynamic Monitoring Framework. Remote Sensing. 2021; 13(5):865. https://doi.org/10.3390/rs13050865
Chicago/Turabian StyleLi, Juanjuan, Chao Wang, Lu Xu, Fan Wu, Hong Zhang, and Bo Zhang. 2021. "Multitemporal Water Extraction of Dongting Lake and Poyang Lake Based on an Automatic Water Extraction and Dynamic Monitoring Framework" Remote Sensing 13, no. 5: 865. https://doi.org/10.3390/rs13050865