
Abstract
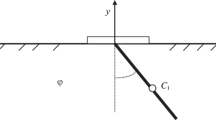
We consider a system with two degrees of freedom (a pendulum on a trolley) in the case where one restricted control force is applied to the trolley. The task of a time-optimal horizontal movement to the required distance from the given equilibrium position to another identical state with the suppression of oscillations is solved. Trajectories that meet the necessary optimality conditions for the asymptotically close nonlinear system (when the mass of the pendulum is negligible in comparison with the mass of the trolley) are constructed. The results are compared with the known optimal solutions for a linearized system.









Similar content being viewed by others

REFERENCES
F. L. Chernous’ko, L. D. Akulenko, and B. N. Sokolov, Control of Oscillations (Nauka, Moscow, 1980) [in Russian].
V. M. Mamalyga, “Optimal control of one oscillatory system,” Izv. Akad. Nauk SSSR, Mekh. Tverd. Tela, No. 3, 8–17 (1978).
L. S. Pontryagin, V. G. Boltyanskii, R. V. Gamkrelidze, and E. F. Mishchenko, Mathematical Theory of Optimal Processes (Nauka, Moscow, 1969; Wiley, New York, London, 1962).
O. R. Kayumov, “Optimal control of an elliptical pendulum,” Izv. Akad. Nauk SSSR, Mekh. Tverd. Tela, No. 4, 38–44 (1985).
O. R. Kayumov, “On the global controllability of some lagrangian systems,” Izv. Akad. Nauk SSSR, Mekh. Tverd. Tela, No. 6, 16–23 (1986).
E. B. Lee and L. Markus, Foundations of Optimal Control Theory (Krieger, Dordrecht, 1986).
R. Gabasov and F. M. Kirillova, Singular Optimal Controls (Nauka, Moscow, 1973) [in Russian].
I. M. Anan’evskii and T. A. Ishkhanyan, “Control of a rigid body carrying dissipative oscillators under perturbations,” J. Comput. Syst. Sci. Int. 58, 40 (2019).
I. M. Anan’evskii, “Motion control for platforms bearing elastic links with unknown phase states,” J. Comput. Syst. Sci. Int. 58, 844 (2019).
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by L. Kartvelishvili
Rights and permissions
About this article

Cite this article
Kayumov, O.R. Time-Optimal Movement of a Trolley with a Pendulum. J. Comput. Syst. Sci. Int. 60, 28–38 (2021). https://doi.org/10.1134/S106423072101007X
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S106423072101007X