
Abstract
Molten metal melt pools are characterised by highly non-linear responses, which are very sensitive to imposed boundary conditions. Temporal and spatial variations in the energy flux distribution are often neglected in numerical simulations of melt pool behaviour. Additionally, thermo-physical properties of materials are commonly changed to achieve agreement between predicted melt-pool shape and experimental post-solidification macrograph. Focusing on laser spot melting in conduction mode, we investigated the influence of dynamically adjusted energy flux distribution and changing thermo-physical material properties on melt pool oscillatory behaviour using both deformable and non-deformable assumptions for the gas-metal interface. Our results demonstrate that adjusting the absorbed energy flux affects the oscillatory fluid flow behaviour in the melt pool and consequently the predicted melt-pool shape and size. We also show that changing the thermo-physical material properties artificially or using a non-deformable surface assumption lead to significant differences in melt pool oscillatory behaviour compared to the cases in which these assumptions are not made.
Export citation and abstract BibTeX RIS

Original content from this work may be used under the terms of the Creative Commons Attribution 4.0 license. Any further distribution of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
1. Introduction
Laser melting is being utilised for material processing such as additive manufacturing, joining, cutting and surface modification. The results of experimentation performed by Ayoola et al [1] revealed that the energy flux distribution over the melt-pool surface can affect melting, convection and energy transport in liquid melt pools and the subsequent re-solidification during laser melting processes. The imposed energy flux heats and melts the material and generates temperature gradients over the melt-pool surface. The resulting surface tension gradients and therefore Marangoni force is often the dominant force driving fluid flow, as can be understood virtually from the numerical investigation conducted by Oreper et al [2] and experimental observations reported by Mills et al [3]. Experimental investigations of Heiple et al[4] showed that the presence of surfactants in molten materials can alter Marangoni convection in the melt pool, and thus the melt-pool shape. Moreover, Paul et al [5] reported that the smoothness of the melt pool surface decreases when surfactants are present in the melt pool. However, according to the literature survey conducted by Cook et al [6], the influence of surfactants on variations of surface tension and its temperature gradient is often neglected in numerical simulations of welding and additive manufacturing. DebRoy and David [7] stated that fluid flow in melt pools can lead to deformation and oscillation of the liquid free surface and can affect the stability of the process and the structure and properties of the solid materials after re-solidification. Aucott et al [8] confirmed that transport phenomena during fusion welding and additive manufacturing processes are characterised by highly non-linear responses that are very sensitive to material composition and imposed heat flux boundary conditions. Numerical models capable of predicting the melt pool behaviour with a sufficient level of accuracy are thus required to gain an insight into the physics of fluid flow and the nature of flow instabilities that are not accessible experimentally.
To avoid excessive simulation complexity and execution time in numerical simulations, the melt pool in such simulations is often decoupled from the heat source, the latter being incorporated as a boundary condition at the melt-pool surface. These boundary conditions should be imposed with a sufficient level of accuracy, as it is known from the work of Zacharia et al [9] that modelling the interfacial phenomena is critical to predicting the melt pool behaviour. Numerical studies on melt pool behaviour reported in the literature use both deformable and non-deformable surface assumptions for the gas-metal interface. Comparing the melt-pool shapes predicted using both deformable and non-deformable surface assumptions, Ha and Kim [10] concluded that free-surface oscillations can enhance convection in the melt pool and influence the melt-pool shape. Shah et al [11] reported that the difference between melt-pool shapes obtained from numerical simulations with deformable and non-deformable surface assumptions depends on the laser power. Three-dimensionality of the molten metal flow in melt pools, as observed experimentally by Zhao et al [12] and numerically by Kidess et al [13], is often neglected in numerical simulations. Moreover, when accounting for surface deformations, the volume-of-fluid (VOF) method developed by Hirt and Nichols [14], based on a Eulerian formulation, is the most common method for modelling the melt pool behaviour. In this diffuse boundary method, the interfacial forces and the energy fluxes applied on the melt-pool surface are treated as volumetric source terms in the surface region, instead of imposing them as boundary conditions. In this approach, however, the fact that surface deformations lead to temporal and spatial variations of the free surface boundary conditions, as remarked by Meng et al [15] and Wu et al [16], is often neglected. The results reported by Choo et al [17] suggest that variations in power-density distribution and changes in free-surface profile can affect molten metal flow in melt pools and its stability. Further investigations are essential to improve the understanding of the complex transport phenomena that happen during laser spot melting.
The aim of the present work is to analyse the effects of a dynamically adjusting energy flux distribution over the deforming liquid surface on the nature of fluid flow instabilities in partially-penetrated liquid melt pools. We will particularly focus on flow instabilities in low-Prandtl number liquid metal pools during conduction-mode laser spot melting; our results should however be relevant for a much wider range of materials processing technologies. Three-dimensional calculations are carried out to numerically predict the melt pool behaviour and thermocapillary-driven flow instabilities using various heat source implementation methods. Our study provides a quantitative representation and an understanding of the influence of heat flux boundary conditions on the transport phenomena and flow instabilities in the molten metal melt pool. Additionally, we discuss the influence of artificially enhanced transport coefficients on the melt-pool oscillatory behaviour.
2. Model description
2.1. Physical model
Laser spot melting of a metallic S705 alloy, as shown schematically in figure 1 and as experimentally studied by Pitscheneder et al [18], was numerically simulated as a representative example in the present work. A defocused laser-beam with a radius of  heats the bulk material from its top surface for
heats the bulk material from its top surface for  . The laser-beam power Q is set to
. The laser-beam power Q is set to  with a top-hat intensity distribution. The averaged laser absorptivity of the material surface η is assumed to remain constant at 13% [18]. The absorbed laser power leads to an increase in temperature and subsequent melting of the base material. The base material is a rectangular cuboid shape with a base size (L × L) of
with a top-hat intensity distribution. The averaged laser absorptivity of the material surface η is assumed to remain constant at 13% [18]. The absorbed laser power leads to an increase in temperature and subsequent melting of the base material. The base material is a rectangular cuboid shape with a base size (L × L) of  and a height (
and a height ( ) of
) of  , initially at an ambient temperature of
, initially at an ambient temperature of  . A layer of air with a thickness of
. A layer of air with a thickness of  is considered above the base material to monitor the gas-metal interface evolution. Except for the surface tension, the material properties are assumed to be constant and temperature independent and are presented in table 1. Although temperature-dependent properties can be employed in the present model to enhance the model accuracy, employing temperature-independent properties facilitates comparison of the results of the present work with previous results published in the literature [10, 19, 20], where temperature-independent material properties are employed. Moreover, further studies are required to enhance the accuracy of calculation and measurement of temperature-dependent material properties, particularly for the liquid phase above the melting temperature. The effects of employing temperature-dependent material properties on the thermal and fluid flow fields and melt-pool shape are discussed in detail in section 4.3. A change in surface-tension due to the non-uniform temperature distribution over the gas–liquid interface induces thermocapillary stresses that drive the melt flow. This fluid motion from low to high surface-tension regions changes the temperature distribution in the melt pool [21] and can lead to surface deformations that change the melt-pool shape and properties of the material after solidification [22]. The sulphur contained in the alloy can alter the surface tension of the molten material and its variations with temperature [23].
is considered above the base material to monitor the gas-metal interface evolution. Except for the surface tension, the material properties are assumed to be constant and temperature independent and are presented in table 1. Although temperature-dependent properties can be employed in the present model to enhance the model accuracy, employing temperature-independent properties facilitates comparison of the results of the present work with previous results published in the literature [10, 19, 20], where temperature-independent material properties are employed. Moreover, further studies are required to enhance the accuracy of calculation and measurement of temperature-dependent material properties, particularly for the liquid phase above the melting temperature. The effects of employing temperature-dependent material properties on the thermal and fluid flow fields and melt-pool shape are discussed in detail in section 4.3. A change in surface-tension due to the non-uniform temperature distribution over the gas–liquid interface induces thermocapillary stresses that drive the melt flow. This fluid motion from low to high surface-tension regions changes the temperature distribution in the melt pool [21] and can lead to surface deformations that change the melt-pool shape and properties of the material after solidification [22]. The sulphur contained in the alloy can alter the surface tension of the molten material and its variations with temperature [23].
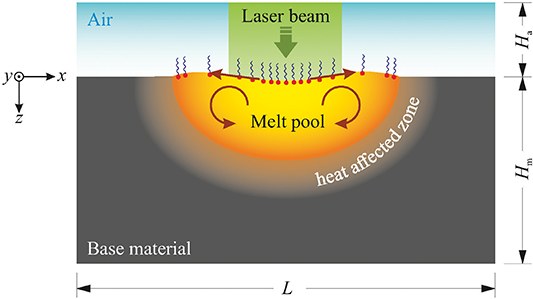
Figure 1. Schematic of conduction-mode laser spot melting.
Download figure:
Standard image High-resolution imageTable 1. Thermophysical properties of the Fe-S alloy and air used in the present study. Values are taken from [20].
| Property | Fe-S alloy | Air | Unit |
|---|---|---|---|
| Density ρ | 8100 | 1.225 | kg m−3 |
Specific heat capacity 
| 670 | 1006 | J kg−1 K−1 |
| Thermal conductivity k | 22.9 | 0.024 | W m−1 K |
| Viscosity µ | 6 × 10−3 | 1.8 × 10−05 | kg m−1 s−1 |
Latent heat of fusion 
| 250800 | – | J kg−1 |
Liquidus temperature 
| 1620 | – | K |
Solidus temperature 
| 1610 | – | K |
2.2. Mathematical models
A three-dimensional multiphase model based on the finite-volume method was utilised to predict the melt pool dynamic behaviour and the associated transport phenomena. The present model is developed for conduction-mode laser melting. Further considerations will be required to develop the model for keyhole mode welding, including the complex laser-matter interactions, changes in surface chemistry and consequent surface tension variations for non- or partially shielded welding conditions. Both the molten metal and air were treated as Newtonian and incompressible fluids. Thermal buoyancy forces, which in laser spot melting are generally negligible compared to thermocapillary forces [24], were neglected both in the liquid metal and in the air. During conduction-mode laser-melting, the heat-source energy density is too low to cause significant vaporisation of the liquid metal [25], and the surface deformations are too small to cause multiple reflections of the laser rays at the liquid surface [26]. Furthermore, our preliminary results indicate that the maximum temperature of the melt pool is predominantly below  , significantly less than the boiling temperature of stainless steels, which is typically
, significantly less than the boiling temperature of stainless steels, which is typically  . Hence, multiple reflections and vaporisation were ignored. With this, the unsteady conservation equations of mass, momentum and energy were defined as follows:
. Hence, multiple reflections and vaporisation were ignored. With this, the unsteady conservation equations of mass, momentum and energy were defined as follows:


where ρ is density, t time,  velocity vector, p pressure, µ dynamic viscosity, h sensible heat, k thermal conductivity,
velocity vector, p pressure, µ dynamic viscosity, h sensible heat, k thermal conductivity,  specific heat capacity at constant pressure and ΔH latent heat. The enthalpy of the material H was defined as the sum of the latent heat and the sensible heat [27], and is expressed as
specific heat capacity at constant pressure and ΔH latent heat. The enthalpy of the material H was defined as the sum of the latent heat and the sensible heat [27], and is expressed as

where  is reference enthalpy,
is reference enthalpy,  reference temperature,
reference temperature,  latent heat of fusion, and
latent heat of fusion, and  local liquid volume-fraction. Assuming the liquid volume-fraction in the metal to be a function of temperature only, a linear function [27] was used to calculate the liquid volume-fraction as follows:
local liquid volume-fraction. Assuming the liquid volume-fraction in the metal to be a function of temperature only, a linear function [27] was used to calculate the liquid volume-fraction as follows:

where  and
and  are the solidus and liquidus temperatures, respectively.
are the solidus and liquidus temperatures, respectively.
To suppress fluid velocities in solid regions and to model fluid flow damping in the so-called "mushy zone", where phase transformation occurs within a temperature range between  and
and  , a momentum sink term
, a momentum sink term  [28] was implemented into the momentum equation as
[28] was implemented into the momentum equation as

where C is the mushy-zone constant and  is a small number to avoid division by zero as
is a small number to avoid division by zero as  approaches 0. The mushy-zone constant C was set to
approaches 0. The mushy-zone constant C was set to  , which is large enough to dampen fluid velocities in solid regions according to the criterion defined by Ebrahimi et al [29], and was equal to 10−3.
, which is large enough to dampen fluid velocities in solid regions according to the criterion defined by Ebrahimi et al [29], and was equal to 10−3.
To capture the position of the gas–metal interface during melting, the volume-of-fluid (VOF) method developed by Hirt and Nichols [14] was utilised. This requires the solution of a transport equation for one additional scalar variable φ (i.e., the so-called volume-of-fluid fraction) that varies between 0 in the gas phase and 1 in the metal phase:

Computational cells with 0 ≤ φ ≤ 1 are in the gas-metal interface region. The effective thermophysical properties of the fluid is then calculated using the mixture model as follows [30]:

where ζ corresponds to density ρ, viscosity µ, thermal conductivity k and specific heat capacity  .
.
Based on the method developed by Brackbill et
al [31], surface tension and thermocapillary forces acting on the gas-metal interface were applied as volumetric forces in these interface cells and were introduced into the momentum equation as a source term  as follows:
as follows:

where subscripts indicate the phase. The term  was utilised to abate the effect of the large metal-to-gas density ratio by redistributing the volumetric surface-forces towards the metal phase (i.e., the heavier phase).
was utilised to abate the effect of the large metal-to-gas density ratio by redistributing the volumetric surface-forces towards the metal phase (i.e., the heavier phase).  is the surface force per unit area and was defined as follows:
is the surface force per unit area and was defined as follows:

where the first term on the right-hand side is the normal component, which depends on the value of surface tension and curvature of the melt-pool surface, and the second term is the tangential component that is affected by the surface tension gradient. In equation (10), σ is surface tension, and κ the surface curvature is

and  the surface unit normal vector is
the surface unit normal vector is

2.2.1. Surface tension.
The temperature dependence of the surface tension of a liquid solution with a low concentration of surfactant can be approximated using a theoretical correlation derived on the basis of the combination of Gibbs and Langmuir adsorption isotherms as follows [32, 33]:

where σ is the surface tension of the solution, σ° the pure solvent surface tension, R the gas constant,  the adsorption at saturation, K the adsorption coefficient, and
the adsorption at saturation, K the adsorption coefficient, and  the activity of the solute. From this, Sahoo et al [23] derived a correlation for binary molten metal–surfactant systems, including binary Fe–S systems:
the activity of the solute. From this, Sahoo et al [23] derived a correlation for binary molten metal–surfactant systems, including binary Fe–S systems:
where  is the surface tension of pure molten-metal at the melting temperature Tm
, ψ an entropy factor, ΔH° the standard heat of adsorption, and
is the surface tension of pure molten-metal at the melting temperature Tm
, ψ an entropy factor, ΔH° the standard heat of adsorption, and  the temperature coefficient of the surface tension of the pure molten-metal. Values of the properties used in equation (14) to calculate the temperature dependence of the surface tension of the molten Fe–S alloy are presented in table 2. Variations of the surface tension and its temperature coefficient are shown in figure 2 for an Fe–S alloy with 150 ppm sulphur content.
the temperature coefficient of the surface tension of the pure molten-metal. Values of the properties used in equation (14) to calculate the temperature dependence of the surface tension of the molten Fe–S alloy are presented in table 2. Variations of the surface tension and its temperature coefficient are shown in figure 2 for an Fe–S alloy with 150 ppm sulphur content.
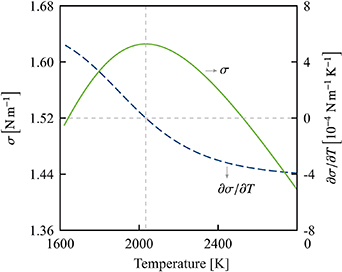
Figure 2. Variations of surface tension (green solid-line) and its temperature gradient (blue dashed-line) as a function of temperature obtained from equation (14) for an Fe–S alloy containing 150 ppm sulphur.
Download figure:
Standard image High-resolution imageTable 2. The values used to calculate the surface tension of molten Fe–S alloy [23]
| Property | Value | Unit |
|---|---|---|

| 1.943 | N m−1 |

| −4.3 × 10−4 | N m−1 K−1 |

| 1.3 × 10−5 | mol m−2 |
| ψ | 3.18 × 10−3 | – |

| 150 | – |
| ΔH° | −166.2 × 105 | J mol−1 |
2.2.2. Laser heat source.
The laser supplies a certain amount of energy (η
Q) to the material. Its energy input was modelled by adding a volumetric source term  to the energy equation (equation (3)) in cells at the gas–metal interface. The surface deformations affect the total energy input to the material [34]. This effect is generally not considered in numerical simulations of melt pool behaviour. To investigate the influence of surface deformations, five different methods for the heat-source implementation were considered.
to the energy equation (equation (3)) in cells at the gas–metal interface. The surface deformations affect the total energy input to the material [34]. This effect is generally not considered in numerical simulations of melt pool behaviour. To investigate the influence of surface deformations, five different methods for the heat-source implementation were considered.
2.2.2.1. Case 1, heat-source implementation without taking the influence of surface deformations on total energy input into consideration.
In this case, the heat source model is defined as

where r is radius defined as  . This method is the most common method in modelling melt-pool surface oscillations without having a deep penetration (keyhole formation) (see for instance, [25, 26]). However, variations in the total energy input caused by a change in melt-pool surface shape, through changes in
. This method is the most common method in modelling melt-pool surface oscillations without having a deep penetration (keyhole formation) (see for instance, [25, 26]). However, variations in the total energy input caused by a change in melt-pool surface shape, through changes in  , causing
, causing  to be different from ηQ, are an inherent consequence of using this method. Additionally, every segment of the melt-pool surface is exposed to the same amount of energy input regardless of the local surface orientation.
to be different from ηQ, are an inherent consequence of using this method. Additionally, every segment of the melt-pool surface is exposed to the same amount of energy input regardless of the local surface orientation.
2.2.2.2. Case 2, heat source adjustment.
To conserve the total energy input, an adjustment coefficient ξ was introduced to the heat source model as follows:

where ξ was evaluated at the beginning of every time-step and was defined as

where ∀ stands for the computational domain. Utilising this technique for welding simulations has already been reported in the literature (see for instance, [15, 16, 34, 35]). Variations in energy absorption with deformations of the melt-pool surface are, however, not taken into consideration in this method.
2.2.2.3. Case 3, heat source redistribution.
In this case, the energy flux was redistributed over the melt-pool surface assuming the energy absorption is a function of the local surface orientation. Accordingly, the local energy absorption is a maximum where the surface is perpendicular to the laser ray and is a minimum where the surface is aligned with the laser ray [36, 37]. This represents a simplified absorptivity model based on the Fresnel's equation [38] and is expressed mathematically, assuming the laser rays being parallel and in the z-direction, as follows:

the total energy input is not necessarily conserved in this method.
2.2.2.4. Case 4, heat source redistribution and adjustment.
Utilising the same technique introduced in Case 2, the heat source model in Case 3 was adjusted to guarantee that total energy input is conserved. Hence, the heat source model was defined as

2.2.2.5. Case 5, Flat non-deformable free surface.
In this case, the surface was assumed to remain flat. Thermocapillary shear stresses caused by a non-uniform temperature distribution on the gas-metal interface were applied as a boundary condition, hence modelling the gas phase was not required. Consequently, the total energy absorbed by the surface was fixed in this method. The boundary conditions are described in section 2.2.3.
Table 3 presents a summary of the cases considered in the present work.
Table 3. Summary of the cases studied in the present work and the features included in the model for each case.
| Name | Deformable free-surface | Heat source adjustment | Heat source redistribution |
|---|---|---|---|
| Case 1 | Yes | No | No |
| Case 2 | Yes | Yes | No |
| Case 3 | Yes | No | Yes |
| Case 4 | Yes | Yes | Yes |
| Case 5 | No | No | No |
2.2.3. Boundary conditions.
The bottom and lateral surfaces of the metal part were modelled to be no slip walls, but in fact they remain solid during the simulation time. At the boundaries of the gas layer above the metal part, a constant atmospheric pressure was applied (i.e.,
 ) allowing air to flow in and out of the domain. The outer boundaries of the computational domain were modelled as adiabatic since heat losses through these boundaries are negligible compared to the laser power [20].
) allowing air to flow in and out of the domain. The outer boundaries of the computational domain were modelled as adiabatic since heat losses through these boundaries are negligible compared to the laser power [20].
For Case 5, in which no gas layer is modelled explicitly, a thermocapillary shear-stress was applied as a boundary condition in the molten regions of the top surface. In the irradiated region on the material top-surface, a constant uniform heat flux was applied, while outside of this region the surface was assumed to be adiabatic [18]. The thermal and thermocapillary shear-stress boundary conditions were defined, respectively, as

and

where  is the tangential velocity vector, and
is the tangential velocity vector, and  the tangential vector to the top surface.
the tangential vector to the top surface.
3. Numerical procedure
The model was developed within the framework of the proprietary computational fluid dynamics solver ANSYS Fluent
[39]. The laser heat source models and the thermocapillary boundary conditions as well as the surface-tension model were implemented through user-defined functions. After performing a grid independence study (results are presented in appendix  less than 0.25, with velocity magnitudes up to
less than 0.25, with velocity magnitudes up to  , the time-step size was set to 10−5 s. Each simulation was executed in parallel on 40 cores (Intel Xeon E5-2630 v4) of a high-performance computing cluster. Scaled residuals of the energy, momentum and continuity equations of less than 10−10, 10−8 and 10−7 respectively, were defined as convergence criteria.
, the time-step size was set to 10−5 s. Each simulation was executed in parallel on 40 cores (Intel Xeon E5-2630 v4) of a high-performance computing cluster. Scaled residuals of the energy, momentum and continuity equations of less than 10−10, 10−8 and 10−7 respectively, were defined as convergence criteria.
4. Results and discussion
4.1. Model validation and solver verification
To verify the reliability and accuracy of the present numerical simulations, the melt-pool shapes obtained from the present simulations, for the problem introduced in section 2.1, are compared to experimental observations reported by Pitscheneder et
al [18]. Figure 3 shows a comparison between the melt-pool shape obtained from the numerical simulation after  of heating and the post-solidification experimental observation, which indicates a reasonable agreement. The maximum absolute deviations between the present numerical predictions and experimental data for the melt-pool width and depth is less than 5% and 2%, respectively. However, it should be noted that the thermal conductivity and viscosity of the liquid material were artificially increased in the simulations by a factor
of heating and the post-solidification experimental observation, which indicates a reasonable agreement. The maximum absolute deviations between the present numerical predictions and experimental data for the melt-pool width and depth is less than 5% and 2%, respectively. However, it should be noted that the thermal conductivity and viscosity of the liquid material were artificially increased in the simulations by a factor  with respect to their reported experimental values, as suggested by Pitscheneder et al
[18]. This is known as employing an 'enhancement factor', mainly to achieve agreement between numerical and experimental results [19]. Independent studies conducted by Saldi et al
[19] and Ehlen et al
[43] revealed that without using such an enhancement factor, the fluid flow structure and the melt-pool shape in simulations differ drastically from experimental observations. The use of an enhancement factor is often justified by the possible occurrence of turbulence and its influence on heat and momentum transfer in the melt pool, which is assumed to be uniform in the melt pool. However, the high-fidelity numerical simulations conducted by Kidess et al [13, 20] on a melt pool with a flat non-deformable melt-pool surface revealed that turbulent enhancement is strongly non-uniform in the melt pool, resulting in an ω-shaped melt pool that differs notably from the results of simulations assuming uniform transport enhancement. We extended this study and performed a high-fidelity simulation based on the large eddy simulation (LES) turbulence model and took the effects of surface deformations into consideration [44] and showed that for the conduction-mode laser melting problem we considered, the influence of surface oscillations on melt pool behaviour is larger compared to the effects of turbulent flow in the melt pool; nevertheless the results do not agree with experiments without using some enhancement. These observations along with previous studies [19, 43, 45] suggest that the published weld pool models lack the inclusion of significant physics. The neglect in simulations of relevant physics such as chemical reactions and unsteady oxygen absorption by the melt-pool surface, non-uniform unsteady surfactant distribution over the melt-pool surface, re-solidification, free surface evolution and three-dimensionality of the fluid flow field has been postulated as reasons why such an ad hoc and unphysical enhancement factor is needed to obtain agreement with experimental data [46–48]. However, the inclusion of such factors will increase the model complexity and computational costs. Further investigations are essential to realising the problem with sufficient details. In section 4.4, the effects of the value used for the enhancement factor
with respect to their reported experimental values, as suggested by Pitscheneder et al
[18]. This is known as employing an 'enhancement factor', mainly to achieve agreement between numerical and experimental results [19]. Independent studies conducted by Saldi et al
[19] and Ehlen et al
[43] revealed that without using such an enhancement factor, the fluid flow structure and the melt-pool shape in simulations differ drastically from experimental observations. The use of an enhancement factor is often justified by the possible occurrence of turbulence and its influence on heat and momentum transfer in the melt pool, which is assumed to be uniform in the melt pool. However, the high-fidelity numerical simulations conducted by Kidess et al [13, 20] on a melt pool with a flat non-deformable melt-pool surface revealed that turbulent enhancement is strongly non-uniform in the melt pool, resulting in an ω-shaped melt pool that differs notably from the results of simulations assuming uniform transport enhancement. We extended this study and performed a high-fidelity simulation based on the large eddy simulation (LES) turbulence model and took the effects of surface deformations into consideration [44] and showed that for the conduction-mode laser melting problem we considered, the influence of surface oscillations on melt pool behaviour is larger compared to the effects of turbulent flow in the melt pool; nevertheless the results do not agree with experiments without using some enhancement. These observations along with previous studies [19, 43, 45] suggest that the published weld pool models lack the inclusion of significant physics. The neglect in simulations of relevant physics such as chemical reactions and unsteady oxygen absorption by the melt-pool surface, non-uniform unsteady surfactant distribution over the melt-pool surface, re-solidification, free surface evolution and three-dimensionality of the fluid flow field has been postulated as reasons why such an ad hoc and unphysical enhancement factor is needed to obtain agreement with experimental data [46–48]. However, the inclusion of such factors will increase the model complexity and computational costs. Further investigations are essential to realising the problem with sufficient details. In section 4.4, the effects of the value used for the enhancement factor  on the thermal and fluid flow fields and melt-pool oscillatory behaviour are discussed in more detail.
on the thermal and fluid flow fields and melt-pool oscillatory behaviour are discussed in more detail.

Figure 3. Comparison of the numerically predicted melt-pool shape after 5 s of heating with the corresponding experimentally measured post-solidification melt-pool shape reported by Pitscheneder et al [18]. Laser power was set to 3850 W and the material contains 150 ppm sulphur. Numerical predictions obtained from the present model assuming (a) non-deformable (Case 5) and (b) deformable gas-metal interface (Case 4).
Download figure:
Standard image High-resolution imageThe experimental and numerical data reported by He et
al [49], who investigated unsteady heat and fluid flow in the melt pool during conduction-mode laser spot welding of stainless steel (AISI304) plates, were considered to validate the reliability of the present model. The melt pool shape obtained from the present model assuming a non-deformable free surface (Case 5) was compared with experimental and numerical data reported by He et al [49] and the results are shown in figure 4. In this problem, the laser power was set to  , the beam radius was
, the beam radius was  and laser pulse duration was
and laser pulse duration was  . The thermal conductivity and viscosity of the molten material were artificially increased in the simulations by a factor
. The thermal conductivity and viscosity of the molten material were artificially increased in the simulations by a factor  and
and  , respectively, as suggested by He et al [49]. The maximum absolute deviations between the present numerical predictions and experimental data for the melt-pool width and depth is less than 8% and 2.5%, respectively. The results obtained from the present model are indeed in reasonable agreement with the reference data, indicating the validity of the present model in reproducing the results reported in literature.
, respectively, as suggested by He et al [49]. The maximum absolute deviations between the present numerical predictions and experimental data for the melt-pool width and depth is less than 8% and 2.5%, respectively. The results obtained from the present model are indeed in reasonable agreement with the reference data, indicating the validity of the present model in reproducing the results reported in literature.
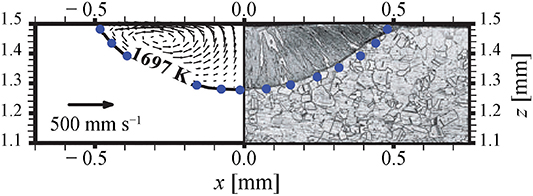
Figure 4. Comparison of the spot melt-pool shape obtained from the present numerical simulation with the corresponding experimentally observed (the right side of the figure) and numerically predicted (the left side of the figure) post-solidification melt-pool shape reported by He et
al [49]. Laser power was set to  and the beam radius was
and the beam radius was  . Blue circles show the melt-pool shape predicted using the present model. The
. Blue circles show the melt-pool shape predicted using the present model. The  reference vector is provided for scaling the velocity field shown in the melt pool.
reference vector is provided for scaling the velocity field shown in the melt pool.
Download figure:
Standard image High-resolution imageThe reliability of the present model was also investigated by comparing the numerically predicted melt-pool size and surface deformations with experimental observations of Cunningham et al
[50]. The evolutions of the melt-pool shape and its surface depression under stationary laser melting of a Ti-6Al-4V plate under conduction mode were studied. In this problem, the laser power is  and has a Gaussian distribution and the radius of the laser spot is
and has a Gaussian distribution and the radius of the laser spot is  . The thermophysical properties of Ti-6Al-4V suggested by Sharma et
al [51] were employed for calculations. Since the melt pool surface temperature reaches the boiling point, the effects of recoil pressure
. The thermophysical properties of Ti-6Al-4V suggested by Sharma et
al [51] were employed for calculations. Since the melt pool surface temperature reaches the boiling point, the effects of recoil pressure  and evaporation heat loss
and evaporation heat loss  were included in the model. The recoil pressure [52] and evaporation heat loss [53] were determined respectively as follows:
were included in the model. The recoil pressure [52] and evaporation heat loss [53] were determined respectively as follows:


where P0 is the ambient pressure,  the latent heat of vaporisation, M the molar mass, R the universal gas constant, T the temperature and
the latent heat of vaporisation, M the molar mass, R the universal gas constant, T the temperature and  the evaporation temperature. The results obtained from the present numerical simulations using the heat source model introduced for Case 4 are compared with those reported by Cunningham et al [50] in figure 5, which show a reasonable agreement. The maximum absolute deviations between the present numerical predictions and experimental data for the melt-pool aspect ratio is less than 12%.
the evaporation temperature. The results obtained from the present numerical simulations using the heat source model introduced for Case 4 are compared with those reported by Cunningham et al [50] in figure 5, which show a reasonable agreement. The maximum absolute deviations between the present numerical predictions and experimental data for the melt-pool aspect ratio is less than 12%.
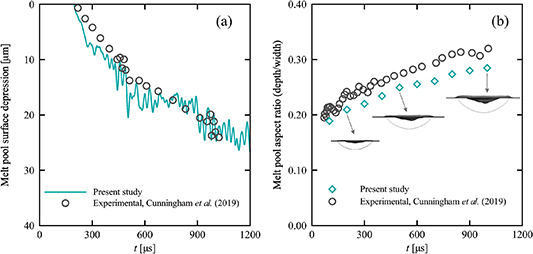
Figure 5. Comparison of (a) the melt-pool surface depression and (b) the melt pool aspect ratio (depth to width ratio) obtained from the present numerical simulation with the corresponding experimental observations of Cunningham et al [50]. Laser power was set to  and the beam radius was
and the beam radius was  . Snapshots of the melt pool and its deformed surface are shown in the right subfigure for three different time instances.
. Snapshots of the melt pool and its deformed surface are shown in the right subfigure for three different time instances.
Download figure:
Standard image High-resolution imageParticular attention was also paid to the effect of spurious currents on numerical predictions of molten metal flow in melt pools with free surface deformations. Spurious currents are an unavoidable numerical artefact generating unphysical parasitic velocity fields that do not vanish with grid refinement when using the continuum surface force technique for modelling surface tension effects in the VOF method. This problem has been thoroughly investigated by Mukherjee et al [54] and the results of their study show that the Reynolds number based on the time-averaged maximum spurious velocity is  . The results of the present simulations show that the flow Reynolds number is
. The results of the present simulations show that the flow Reynolds number is  that is at least two orders of magnitude larger than that induced by spurious currents. Furthermore, to suppress fluid velocities in the solid regions a momentum sink term is defined based on the enthalpy porosity technique that further weakens the spurious currents in solid regions. Therefore, the influence of spurious currents on numerical predictions is considered to be negligible in the present study.
that is at least two orders of magnitude larger than that induced by spurious currents. Furthermore, to suppress fluid velocities in the solid regions a momentum sink term is defined based on the enthalpy porosity technique that further weakens the spurious currents in solid regions. Therefore, the influence of spurious currents on numerical predictions is considered to be negligible in the present study.
4.2. The influence of heat source adjustment
When accounting for surface deformations, the volume-of-fluid (VOF) method developed by Hirt and Nichols [14], based on a Eulerian formulation, is the most common method for modelling the melt pool behaviour. In this diffuse boundary method, the interfacial forces and the energy fluxes applied on the melt-pool surface are treated as volumetric source terms in the surface region, instead of imposing them as boundary conditions. In this approach, however, the fact that surface deformations lead to temporal and spatial variations of the free surface boundary conditions, as remarked by Meng et al [15] and Wu et al [16], is often neglected. The results reported by Choo et al [17] suggest that variations in power-density distribution and changes in free-surface profile can affect molten metal flow in melt pools and its stability. In this section, the influence of applying each of the five different approaches to model the laser heat source (described as Cases 1–5 in section 2.2.2) on the melt pool behaviour is discussed. In these simulations, no enhancement factor, as introduced in the previous section, was employed since it is ad hoc and has little justification in physical reality.
The energy flux distribution over the melt-pool surface determines the spatial temperature distribution over the melt-pool surface and its temporal variations. Due to the temporal changes in the melt-pool surface shape, the total energy absorbed by the material in Case 1 varies between  and
and  , with a median value of
, with a median value of  , which differs from the total energy supplied by the laser
, which differs from the total energy supplied by the laser  . This issue is resolved by utilising a dynamic adjustment coefficient in Case 2, while the relative energy flux distribution remains unchanged. However, the results reported by Courtois et
al [55] and Bergström et
al [56] showed that the energy flux distribution varies with surface deformation during a laser melting process. When surface deformations are too small to cause multiple reflections, redistributing the energy flux over the free surface results in a better input energy conservation as obtained in Case 3. The total energy absorbed by the material in Case 3 ranges between
. This issue is resolved by utilising a dynamic adjustment coefficient in Case 2, while the relative energy flux distribution remains unchanged. However, the results reported by Courtois et
al [55] and Bergström et
al [56] showed that the energy flux distribution varies with surface deformation during a laser melting process. When surface deformations are too small to cause multiple reflections, redistributing the energy flux over the free surface results in a better input energy conservation as obtained in Case 3. The total energy absorbed by the material in Case 3 ranges between  and
and  , with a median value of
, with a median value of  . By further introducing an adjustment coefficient (equation (17)), the absorbed energy can be made to exactly match the supplied laser power ηQ. Finally, for the most simple approach without any surface deformations (i.e., Case 5), the total absorbed energy exactly matches the supplied laser power and remains unchanged in time.
. By further introducing an adjustment coefficient (equation (17)), the absorbed energy can be made to exactly match the supplied laser power ηQ. Finally, for the most simple approach without any surface deformations (i.e., Case 5), the total absorbed energy exactly matches the supplied laser power and remains unchanged in time.
The variations of temperature distribution over the melt-pool surface over time determine the thermocapillary driven flow pattern and melt-pool shape, as shown in figure 6. An unsteady, asymmetric, outwardly directed fluid flow emanating from the pool centre is found for all 5 cases. Flow accelerates towards the pool rim, where it meets inwardly directed fluid flow from the rim, due to the change of sign of  at a certain pool temperature (see figure 2). Close to the region where these two flows meet, velocity magnitudes are high due to the large thermocapillary stresses generated by the steep temperature gradients, in contrast to the low flow velocities in the central region of the pool surface. Interactions between these two opposing flows, and their interactions with the fusion boundary, cause the fluid flow inside the melt pool to be asymmetric and unstable [20], leading to a distorted melt-pool shape.
at a certain pool temperature (see figure 2). Close to the region where these two flows meet, velocity magnitudes are high due to the large thermocapillary stresses generated by the steep temperature gradients, in contrast to the low flow velocities in the central region of the pool surface. Interactions between these two opposing flows, and their interactions with the fusion boundary, cause the fluid flow inside the melt pool to be asymmetric and unstable [20], leading to a distorted melt-pool shape.
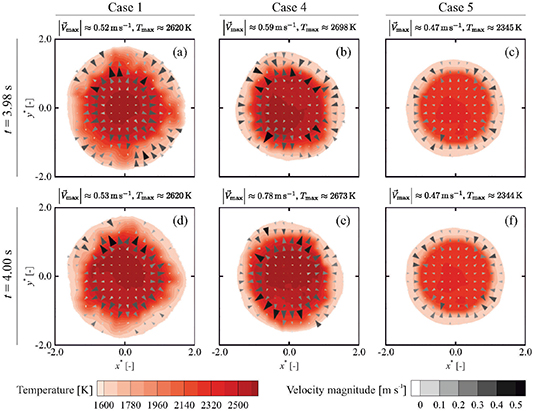
Figure 6. Contours of temperature and the velocity vectors on the melt pool free surface at two different time instances for Cases 1, 4 and 5. Coordinates are non-dimensionalised using the laser-beam radius  as the characteristic length scale.
as the characteristic length scale.
Download figure:
Standard image High-resolution imageMelt-pool surface temperatures are roughly 7–16% higher when surface deformations are taken into consideration (Cases 1–4), compared to flat surface simulations (Case 5). Temperature gradients over the melt-pool surface are also on average larger in Cases 1–4 (with a deformable surface) and particularly in Cases 2–4 (with heat source adjustment and/or redistribution), compared to Case 5 (with a non-deformable surface). Consequently, local fluid velocities caused by thermocapillary stresses are almost 25% higher for Cases 1–4, compared to those of Case 5, and are of the order of  , in reasonable agreement with experimental measurements performed by Aucott et
al [8] and estimated values from the scaling analyses also reported by Oreper and Szekely [2], Rivas and Ostrach [57] and Chakraborty and Chakraborty [58].
, in reasonable agreement with experimental measurements performed by Aucott et
al [8] and estimated values from the scaling analyses also reported by Oreper and Szekely [2], Rivas and Ostrach [57] and Chakraborty and Chakraborty [58].
Free surface deformations have a destabilising effect on the melt pool due to the augmentation of temperature gradients over the melt-pool surface, leading to higher thermocapillary stresses [59]. Additionally, the stagnation region, where the sign of  and thus thermocapillary flow direction change, is sensitive to small spatial disturbances and further enhances melt pool instabilities. Furthermore, variations in magnitude and direction of velocities can cause rotational and pulsating fluid motions, leading to cross-cellular flow patterns with a stochastic behaviour in the melt pool [12, 60].
and thus thermocapillary flow direction change, is sensitive to small spatial disturbances and further enhances melt pool instabilities. Furthermore, variations in magnitude and direction of velocities can cause rotational and pulsating fluid motions, leading to cross-cellular flow patterns with a stochastic behaviour in the melt pool [12, 60].
All such flow instabilities reinforce unsteady energy transport from the melt pool to the surrounding solid material, resulting in continuous melting and re-solidification of the material close to the solid-liquid boundary. This complex interplay leads to the melt-pool surface width for Case 5 to be 23% smaller than that for Case 1, and 10% smaller than for Cases 2–4. The higher amount of heat absorbed by the deformed free-surface in Case 1, and the enhanced convective heat transfer in Cases 1–4, are the main causes for the observed pool size differences.
To investigate the rotational fluid motion, the spatially-averaged angular momentum over the melt-pool surface ( ) about the z-axis (i.e. the axis of rotation) with respect to the origin
) about the z-axis (i.e. the axis of rotation) with respect to the origin  is calculated as follows:
is calculated as follows:

where  is a unit vector in the z-direction,
is a unit vector in the z-direction,  the position vector,
the position vector,  velocity vector and A the area of gas-metal interface. Figure 7 shows the temporal variations of angular momentum over the melt-pool surface as a function of time. Positive values of the angular momentum in figure 7 show a clockwise flow rotation, and vice versa. Kidess et al [20] applied a similar approach to investigate rotational fluid motion over a flat non-deformable melt-pool surface. Continuous fluctuations in the sign of angular momentum indicate an oscillatory rotational fluid motion in the pool that is indeed self-excited. In Cases 1–4, flow pulsations start to take place after roughly
velocity vector and A the area of gas-metal interface. Figure 7 shows the temporal variations of angular momentum over the melt-pool surface as a function of time. Positive values of the angular momentum in figure 7 show a clockwise flow rotation, and vice versa. Kidess et al [20] applied a similar approach to investigate rotational fluid motion over a flat non-deformable melt-pool surface. Continuous fluctuations in the sign of angular momentum indicate an oscillatory rotational fluid motion in the pool that is indeed self-excited. In Cases 1–4, flow pulsations start to take place after roughly  and continue thereafter. This is not however valid for Case 5, where flow pulsations start to occur already after about
and continue thereafter. This is not however valid for Case 5, where flow pulsations start to occur already after about  , and a clockwise rotation is established after
, and a clockwise rotation is established after  , which lasts for roughly two seconds. These instabilities in the flow field are attributed to a large extent to the interactions between the two opposing flows meeting at the melt-pool surface [13, 20], and to a lesser extent the effects of hydrothermal waves [61, 62].
, which lasts for roughly two seconds. These instabilities in the flow field are attributed to a large extent to the interactions between the two opposing flows meeting at the melt-pool surface [13, 20], and to a lesser extent the effects of hydrothermal waves [61, 62].

Figure 7. Variations of the averaged angular momentum over the melt-pool surface over a time period of 4 s for (a) Case 1, (b) Case 2, (c) Case 3, (d) Case 4 and (e) Case 5. Unfiltered data: grey lines, Moving average of the data over  : dashed blue lines.
: dashed blue lines.  indicates a clockwise rotation.
indicates a clockwise rotation.
Download figure:
Standard image High-resolution imageFree surface deformations evolve rapidly because of the thermocapillary stresses acting on the melt-pool surface and are shown in figure 8 at three different time instances. Free surface deformations are smaller and less intermittent in Case 1 compared with Cases 2–4. This is due to the smaller thermocapillary stresses and the wider stagnation region, which makes the surface flow field less sensitive to spatial disturbances. Additionally, the Capillary number ( ), which represents the ratio between viscous and surface-tension forces and which is
), which represents the ratio between viscous and surface-tension forces and which is  for all the cases studied in the present work, appears to be larger in Cases 2–4 (
for all the cases studied in the present work, appears to be larger in Cases 2–4 ( ) compared with Case 1 (
) compared with Case 1 ( ), particularly in the central region of the melt-pool surface. Redistributing the energy flux based on the free surface profile (Cases 3 and 4) disturbs the temperature field locally and thus the velocity distribution over the melt-pool surface.
), particularly in the central region of the melt-pool surface. Redistributing the energy flux based on the free surface profile (Cases 3 and 4) disturbs the temperature field locally and thus the velocity distribution over the melt-pool surface.
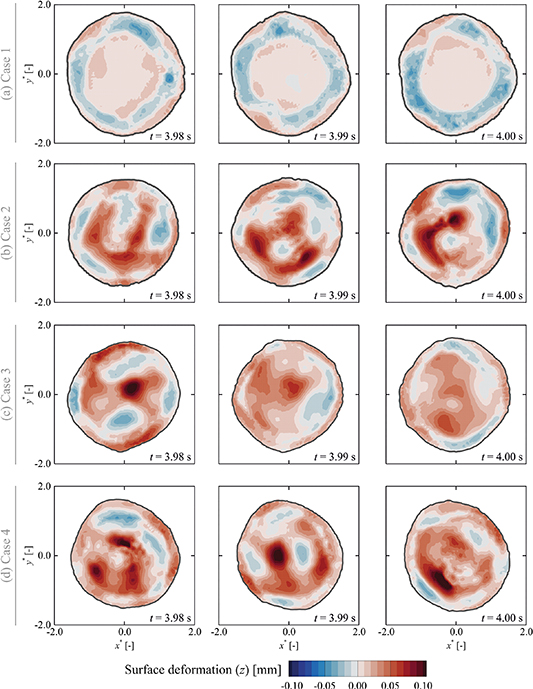
Figure 8. Contours of melt pool free surface deformation at three different time instances for (a) Case 1, (b) Case 2, (c) Case 3, and (d) Case 4. Coordinates are non-dimensionalised using the laser-beam radius  as the characteristic length scale. Positive and negative values of z indicate surface depression and elevation, respectively.
as the characteristic length scale. Positive and negative values of z indicate surface depression and elevation, respectively.
Download figure:
Standard image High-resolution imageFluid flow may influence the energy transport and associated phase change significantly during laser melting [7], which can be assessed through the Péclet number that is the ratio between advective and diffusive heat transport, defined as follows:

where  is a characteristic length scale, here chosen to be
is a characteristic length scale, here chosen to be  . The value of the Péclet number is much larger than one (
. The value of the Péclet number is much larger than one ( ), which indicates a large contribution of advection to the total energy transport, compared with diffusion.
), which indicates a large contribution of advection to the total energy transport, compared with diffusion.
The predicted melt-pool depth is shown in figure 9 at two different time instances. When surface deformations are taken into account (Cases 1–4), the predicted melt-pool shape is shallow, with its maximum depth located in the central region and its largest width at the surface. When the surface is assumed to be non-deformable (Case 5), the depth profile of the melt-pool resembles a doughnut-shaped, with its maximum width located below the gas-metal interface. The predicted fusion boundaries of all the cases studied in the present work are asymmetric and unstable. Flow instabilities in the melt pool increase when surface deformations are taken into account, which enhance convection in the pool resulting in a smooth melt-pool depth profile. Variations in the melt-pool shape for Case 5 are less conspicuous compared to those for Cases 1–4 because of the smaller fluctuations in the fluid flow field.
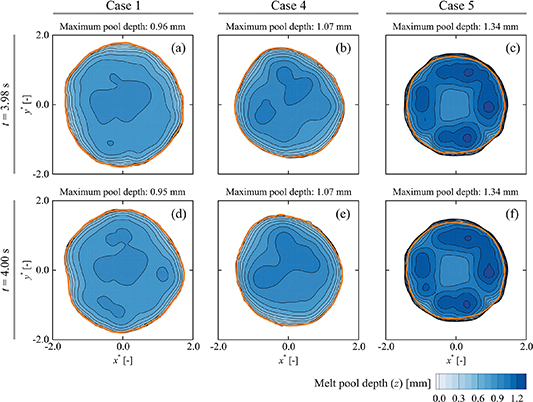
Figure 9. Contours of melt-pool depth at  and
and  for Cases 1, 4 and 5. Coordinates are non-dimensionalised using the laser-beam radius
for Cases 1, 4 and 5. Coordinates are non-dimensionalised using the laser-beam radius  as the characteristic length scale. The orange circular line shows the melt pool boundary at its top surface.
as the characteristic length scale. The orange circular line shows the melt pool boundary at its top surface.
Download figure:
Standard image High-resolution imageTo understand the three-dimensional oscillatory flow behaviour, three monitoring points were selected over the melt-pool surface in different non-azimuthal directions  ,
,  and
and  in addition to a point
in addition to a point  on the melt-pool surface, in which x* and y* are non-dimensionalized with the laser beam radius
on the melt-pool surface, in which x* and y* are non-dimensionalized with the laser beam radius  . Temperature signals, recorded from the monitoring point p4, and the corresponding 'fast Fourier transform' (FFT) [63] frequency spectra are shown in figure 10. In the presence of surface deformations (Cases 1–4), self-excited temperature fluctuations, initiated by numerical noise, grow and reach a quasi-steady state after about
. Temperature signals, recorded from the monitoring point p4, and the corresponding 'fast Fourier transform' (FFT) [63] frequency spectra are shown in figure 10. In the presence of surface deformations (Cases 1–4), self-excited temperature fluctuations, initiated by numerical noise, grow and reach a quasi-steady state after about  . Without surface deformations (Case 5), the amplitudes of temperature fluctuations remain very small. In Case 1, where surface deformations are taken into account, the temperature fluctuations with large amplitudes have a fundamental frequency of
. Without surface deformations (Case 5), the amplitudes of temperature fluctuations remain very small. In Case 1, where surface deformations are taken into account, the temperature fluctuations with large amplitudes have a fundamental frequency of  , with harmonics at
, with harmonics at  and
and  . Irregular patterns appear in the spectrum of temperature fluctuations for Case 2–4, showing a highly unsteady behaviour that results from the enhancement of thermocapillary stresses and the variations in energy flux distribution.
. Irregular patterns appear in the spectrum of temperature fluctuations for Case 2–4, showing a highly unsteady behaviour that results from the enhancement of thermocapillary stresses and the variations in energy flux distribution.
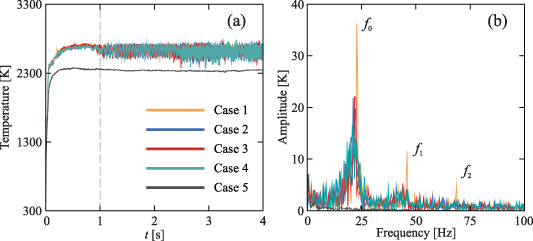
Figure 10. (a) Temperature signals recorded from the monitoring point p4 located at  on the melt-pool surface and (b) the corresponding frequency spectra. Temperature signals in the period of 1–4 s are employed for FFT analysis.
on the melt-pool surface and (b) the corresponding frequency spectra. Temperature signals in the period of 1–4 s are employed for FFT analysis.
Download figure:
Standard image High-resolution imageTemperature signals recorded from monitoring points p1, p2 and p3 in the time interval of 2– are shown in figure 11. The data for Case 1 indicate that the thermal and fluid flow fields are dominated by a pulsating behaviour. This is also valid for Case 4 up to roughly
are shown in figure 11. The data for Case 1 indicate that the thermal and fluid flow fields are dominated by a pulsating behaviour. This is also valid for Case 4 up to roughly  ; however, after
; however, after  modulation of temperature fluctuations takes place, which is probably due to changes in temperature gradients, melt pool size and the complex interactions between vortices generated inside the melt pool. Similar behaviour was observed for Cases 2 and 3 (not shown here). The amplitudes of temperature fluctuations appear to be smaller for Case 5 compared to the other cases and show an irregular behaviour, revealing complex unsteady flow in the melt pool.
modulation of temperature fluctuations takes place, which is probably due to changes in temperature gradients, melt pool size and the complex interactions between vortices generated inside the melt pool. Similar behaviour was observed for Cases 2 and 3 (not shown here). The amplitudes of temperature fluctuations appear to be smaller for Case 5 compared to the other cases and show an irregular behaviour, revealing complex unsteady flow in the melt pool.

Figure 11. Temperature signals recorded from three monitoring points at the melt pool free surface placed at a radius of  and along different azimuthal directions (
and along different azimuthal directions ( ,
,  and
and  ). (a) Case 1, (b) Case 4, and (c) Case 5. Signals are smoothed using a moving averaging window of
). (a) Case 1, (b) Case 4, and (c) Case 5. Signals are smoothed using a moving averaging window of  .
.
Download figure:
Standard image High-resolution image4.3. The effects of employing temperature-dependent material properties
In this section, the effects of employing temperature-dependent properties on numerical predictions of thermal and flow fields as well as the melt-pool shape are investigated using two different heat source models (Cases 1 and 4). Temperature-dependent properties for the metallic alloy considered in the present study (S705) are given in table 4, where the values are estimated by analogy with the values for iron-based alloys [64]. Temperature distribution over the melt-pool surface and free-surface flow after  of heating are shown in figure 12 for both temperature-dependent and temperature-independent thermophysical properties. Melt-pool surface temperatures predicted using temperature-independent properties are about 1–6% lower than those predicted using temperature-dependent properties. This is mainly attributed to the changes in the thermal diffusivity
of heating are shown in figure 12 for both temperature-dependent and temperature-independent thermophysical properties. Melt-pool surface temperatures predicted using temperature-independent properties are about 1–6% lower than those predicted using temperature-dependent properties. This is mainly attributed to the changes in the thermal diffusivity  of the molten material. The thermal conductivity of the molten material changes from
of the molten material. The thermal conductivity of the molten material changes from  at
at  to
to  at
at  . Hence, the average thermal diffusivity of the molten material obtained from a temperature-dependent model is about 10% lower than that estimated using temperature-independent properties. The fluid velocities are roughly 15–32% lower when temperature-independent properties are employed, compared to those predicted using temperature-dependent properties, which is due to the decrease in the viscosity of the molten material at elevated temperatures. With an increase in temperature, the thermal conductivity of the molten metal increases and the viscosity of the molten metal decreases, resulting in a reduction of momentum diffusivity and enhancement of thermal diffusivity and thus reduction of the Prandtl number
. Hence, the average thermal diffusivity of the molten material obtained from a temperature-dependent model is about 10% lower than that estimated using temperature-independent properties. The fluid velocities are roughly 15–32% lower when temperature-independent properties are employed, compared to those predicted using temperature-dependent properties, which is due to the decrease in the viscosity of the molten material at elevated temperatures. With an increase in temperature, the thermal conductivity of the molten metal increases and the viscosity of the molten metal decreases, resulting in a reduction of momentum diffusivity and enhancement of thermal diffusivity and thus reduction of the Prandtl number  . Although the heat source models affect the thermal and flow fields in the melt pool, it is found that the numerical predictions are less sensitive to the heat source models when temperature-dependent properties are employed for the cases studied in the present work. However, it should be noted that for the cases where surface deformations are larger, the effects of heat source adjustment on numerical predictions become critical, as discussed in section 4.2.
. Although the heat source models affect the thermal and flow fields in the melt pool, it is found that the numerical predictions are less sensitive to the heat source models when temperature-dependent properties are employed for the cases studied in the present work. However, it should be noted that for the cases where surface deformations are larger, the effects of heat source adjustment on numerical predictions become critical, as discussed in section 4.2.
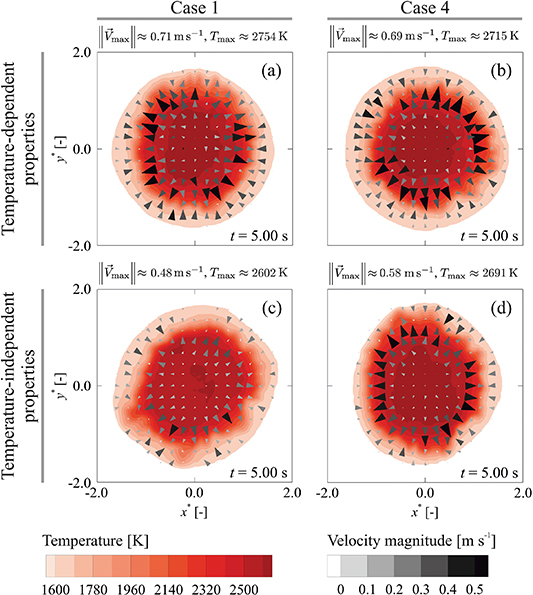
Figure 12. Contours of temperature and the velocity vectors on the melt pool free surface after  of heating predicted using the heat source models Cases 1 and 4 with temperature-dependent (table 4) and temperature-independent (table 1) material properties. Coordinates are non-dimensionalised using the laser-beam radius
of heating predicted using the heat source models Cases 1 and 4 with temperature-dependent (table 4) and temperature-independent (table 1) material properties. Coordinates are non-dimensionalised using the laser-beam radius  as the characteristic length scale.
as the characteristic length scale.
Download figure:
Standard image High-resolution imageTable 4. Temperature-dependent thermophysical properties of the Fe–S alloy used in the present study. Values are estimated by analogy with the values for iron-based alloys [64].
| Property | Fe-S alloy | Unit |
|---|---|---|
| Density ρ | 8100 | kg m−3 |
Specific heat capacity 
| 627 (solid phase) | J kg−1 K−1 |
| 723.14 (liquid phase) | ||
| Thermal conductivity k | 8.8521+0.0114·T (solid phase) | W m−1 K−1 |
| 4.5102+0.0107·T (liquid phase) | ||
| Viscosity µ |

| kg m−1 s−1 |
Latent heat of fusion 
| 250 800 | J kg−1 |
| Thermal expansion coefficient β | 2 × 10−6 | K−1 |
Liquidus temperature 
| 1620 | K |
Solidus temperature 
| 1610 | K |
Changes in the material properties with temperature affect thermal and flow fields in the melt pool, resulting in changes in the predicted melt-pool shape, as shown in figure 13. When temperature-dependent properties are employed, the melt-pool depth is significantly (about 36–74%) larger than that predicted using temperature-independent properties.
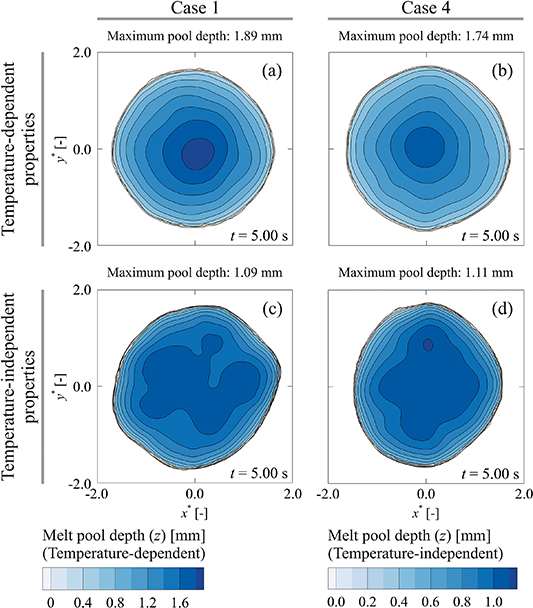
Figure 13. Contours of melt-pool depth at  for Cases 1 and 4 predicted using temperature-dependent and temperature-independent material properties. Coordinates are non-dimensionalised using the laser-beam radius
for Cases 1 and 4 predicted using temperature-dependent and temperature-independent material properties. Coordinates are non-dimensionalised using the laser-beam radius  as the characteristic length scale. The orange circular line shows the melt pool boundary at its top surface.
as the characteristic length scale. The orange circular line shows the melt pool boundary at its top surface.
Download figure:
Standard image High-resolution imageTemperature signals recorded from the monitoring point p4 and the corresponding frequency spectra are shown in figure 14. Temperature signals received from the monitoring point p4 are almost in the same range and vary between  and
and  . Employing temperature-dependent properties affects the frequency spectra of fluctuations, however the amplitude of fluctuations remains almost unaffected. The results presented in figure 14 indicate that adjusting the heat source dynamically during simulations can result in a decrease in the amplitude of temperature fluctuations, however its effect on the frequency spectrum is insignificant.
. Employing temperature-dependent properties affects the frequency spectra of fluctuations, however the amplitude of fluctuations remains almost unaffected. The results presented in figure 14 indicate that adjusting the heat source dynamically during simulations can result in a decrease in the amplitude of temperature fluctuations, however its effect on the frequency spectrum is insignificant.
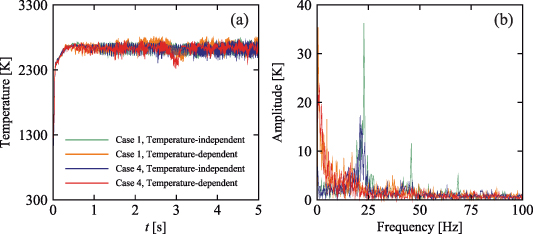
Figure 14. The influence of employing temperature-dependent material properties on temperature signals received from the melt pool and the corresponding frequency spectra. (a) Temperature signals recorded from the monitoring point p4 located at  on the melt-pool surface and (b) the corresponding frequency spectra. Temperature signals in the period of 1–
on the melt-pool surface and (b) the corresponding frequency spectra. Temperature signals in the period of 1– are employed for FFT analysis.
are employed for FFT analysis.
Download figure:
Standard image High-resolution image4.4. The effects of the enhancement factor
In section 4.1 it was mentioned that, in many simulation studies in literature, the thermal conductivity and viscosity of the liquid metal were artificially increased by a so-called enhancement factor  , in order to obtain better agreement between experimental and simulated post-solidification melt-pool shapes. Numerical studies carried out by De et al [65–67] showed that the values reported for the enhancement factor in the literature depend greatly on operating conditions and ranges from 2 to 100 (see for instance, [68–71]), however values between 2 and 10 are most often employed. The effects of the enhancement factor
, in order to obtain better agreement between experimental and simulated post-solidification melt-pool shapes. Numerical studies carried out by De et al [65–67] showed that the values reported for the enhancement factor in the literature depend greatly on operating conditions and ranges from 2 to 100 (see for instance, [68–71]), however values between 2 and 10 are most often employed. The effects of the enhancement factor  on thermal and fluid flow fields in molten metal melt pools as well as the melt-pool shape can be found in [19, 43, 45], thus are not repeated here. Focusing on Case 4 in which free surface deformations are accounted for, the influence of
on thermal and fluid flow fields in molten metal melt pools as well as the melt-pool shape can be found in [19, 43, 45], thus are not repeated here. Focusing on Case 4 in which free surface deformations are accounted for, the influence of  on the oscillatory flow behaviour is investigated. Temperatures recorded from the monitoring point p4 and the temperature fluctuation spectra are shown in figure 15. Temperatures and the amplitudes of fluctuations reduce with increasing
on the oscillatory flow behaviour is investigated. Temperatures recorded from the monitoring point p4 and the temperature fluctuation spectra are shown in figure 15. Temperatures and the amplitudes of fluctuations reduce with increasing  . The contribution of diffusion in total energy transport increases with
. The contribution of diffusion in total energy transport increases with  , which results in a reduction of temperature gradients and therefore thermocapillary stresses generated over the melt-pool surface. The reduced thermocapillary stresses in addition to the enhanced viscosity of the molten metal lead to a reduction of fluid velocities that decrease convection in the melt pool further, which significantly affects the fluid flow structure. Increasing
, which results in a reduction of temperature gradients and therefore thermocapillary stresses generated over the melt-pool surface. The reduced thermocapillary stresses in addition to the enhanced viscosity of the molten metal lead to a reduction of fluid velocities that decrease convection in the melt pool further, which significantly affects the fluid flow structure. Increasing  to 2.5 results in relatively deeper melt pool with a corresponding reduction of the fundamental frequency of fluctuations. Using higher values of
to 2.5 results in relatively deeper melt pool with a corresponding reduction of the fundamental frequency of fluctuations. Using higher values of  , the melt-pool shape approaches a spherical-cap shape and the frequency spectrum becomes rather uniform with small amplitude fluctuations.
, the melt-pool shape approaches a spherical-cap shape and the frequency spectrum becomes rather uniform with small amplitude fluctuations.
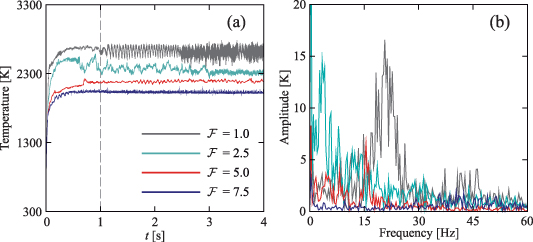
Figure 15. (a) Temperature signals recorded from the monitoring point  on the melt-pool surface and (b) the corresponding frequency spectra for different values of the enhancement factor
on the melt-pool surface and (b) the corresponding frequency spectra for different values of the enhancement factor  . Temperature signals in the period of 1–
. Temperature signals in the period of 1– are employed for FFT analysis.
are employed for FFT analysis.
Download figure:
Standard image High-resolution image5. Conclusions
Molten metal melt pool behaviour during a laser spot melting process was studied to investigate the influence of dynamically adjusted energy flux distribution on thermal and fluid flow fields using both deformable and non-deformable gas–metal interfaces.
For the material and laser power studied in the present work, self-excited flow instabilities arise rapidly and fluid flow inside the melt pool is inherently three-dimensional and unstable. Flow instabilities in the melt pool have a significant influence on solidification and melting by altering the thermal and fluid flow fields. Free surface deformations, even small compared to the melt pool size, can significantly influence the fluid flow pattern in the melt pool. When in the numerical simulations the gas-metal interface is assumed to remain flat and non-deformable, lower temperatures with smaller fluctuations were found in comparison to those of the cases with a deformable interface, which results in a different melt-pool shape. Taking the surface deformations into account leads to erratic flow patterns with relatively large fluctuations, which are caused by the intensified interactions between vortices generated in the melt pool resulting from the augmented thermocapillary stresses. When surface deformations are taken into account, various tested methods for adjusting the absorbed energy flux resulted in smaller melt-pool sizes compared to those without an adjustment. However, the melt pool behaves quite similarly for various adjustment methods studied in the present work. This should be noted that the utilisation of temperature-dependent properties can enhance the accuracy of numerical predictions in simulations of molten metal flow in melting pools; however, the results presented in the present work show the importance of employing a physically-realistic heat-source model that is also applicable if temperature-dependent properties were employed.
Although the enhancement factors are widely used to achieve agreement between numerically predicted melt-pool sizes and solidification rates with experiments, they do not represent the physics of complex transport phenomena governing laser spot melting. The use of an enhancement factor can significantly affect the numerical predictions of melt pool oscillatory behaviour.
Author contributions
Conceptualisation, A E, C R K and I M R; methodology, A E; software, A E; validation, A E; formal analysis, A E; investigation, A E; resources, A E, C R K, and I M R; data curation, A E; writing—original draft preparation, A E; writing—review and editing, A E, C R K, and I M R; visualisation, A E; supervision, C R K and I M R; project administration, A E and I M R; and funding acquisition, I M R.
Conflict of interest
The authors declare no conflict of interest.
Acknowledgments
This research was carried out under project number F31.7.13504 in the framework of the Partnership Program of the Materials innovation institute M2i (www.m2i.nl) and the Foundation for Fundamental Research on Matter (FOM) (www.fom.nl), which is part of the Netherlands Organisation for Scientific Research (www.nwo.nl). The authors would like to thank the industrial partner in this project "Allseas Engineering B V" for the financial support.
Appendix A.: Grid independence test
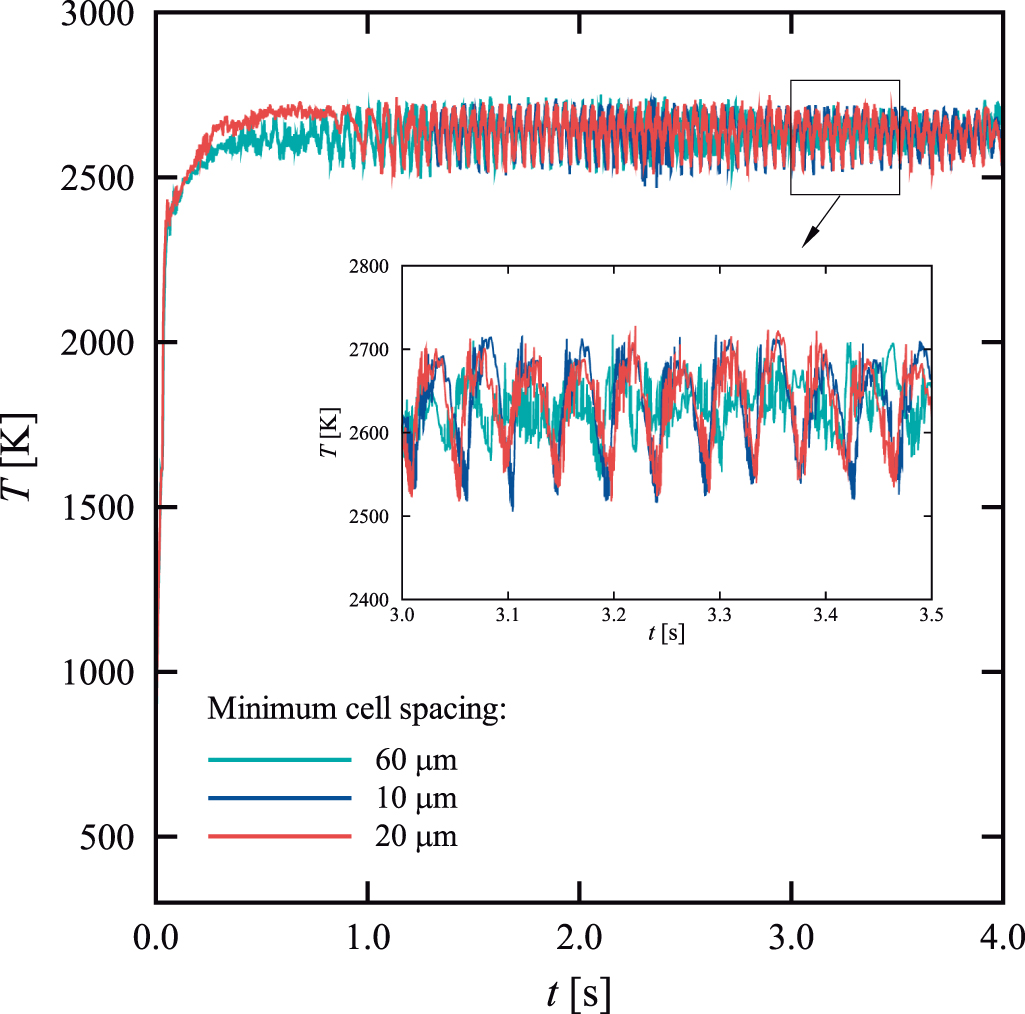
Case 1 was considered for grid independence test. Three different grids with minimum cell spacings of 60, 20 and  were studied. The influence of computational cell size on predicted melt pool depth and width are reported in table A1, which indicate the predictions are reasonably independent of the grid size. The variations of temperature at the centre of the melt pool surface (i.e.,
were studied. The influence of computational cell size on predicted melt pool depth and width are reported in table A1, which indicate the predictions are reasonably independent of the grid size. The variations of temperature at the centre of the melt pool surface (i.e.,
 ) were also investigated for different grid sizes and the results are shown in figure 16. The grid with minimum cell size of
) were also investigated for different grid sizes and the results are shown in figure 16. The grid with minimum cell size of  was employed for the present calculations reported in the paper, and is shown in figure 17.
was employed for the present calculations reported in the paper, and is shown in figure 17.
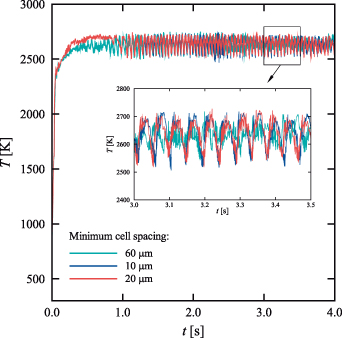
Figure 16. Temperature variations predicted at the melt pool centre using different grid sizes. The grid with minimum cell spacing of  was employed for the calculations reported in the paper.
was employed for the calculations reported in the paper.
Download figure:
Standard image High-resolution image
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 17. The computational grid employed for the present calculations reported in the paper. Regions highlighted in blue show the gas layer above the base material.
Download figure:
Standard image High-resolution image{kind=link}
Table A1. The influence of computational cell size on predicted melt pool size.
| Minimum cell spacing | Total number of cells | Melt pool width | Melt pool depth |
|---|---|---|---|

| 5.5 × 105 | 4.89 mm | 1.09 mm |

| 8.6 × 105 | 4.88 mm | 0.96 mm |

| 2.1 × 106 | 4.88 mm | 0.95 mm |