
Abstract
Atomic force microscope (AFM) is one of the most versatile and powerful devices capable of producing high-resolution images of nanomaterial. Many researchers are widely investigating to improve the scanning speed and image quality of AFM by proposing different techniques. Here, we aim to present a novel approach based on the smooth orthogonal decomposition for the estimation of the surface topography in AFM. The technique proposed in this research not only eliminates the need for a closed-loop controller but also acquires the surface three-dimensional shape (topography) very quickly and accurately. The proposed technique relies on the fact that in the tapping mode of atomic force microscopy, the tip displacements are very fast compared to the topography changes, and the surface topography as a slowly varying parameter can be estimated using the smooth orthogonal decomposition algorithm. To this aim, the state space is reconstructed based on Takens’ theorem and used only the tip displacement measurement data. According to Takens’ theorem, using the delay time and embedding dimension parameters, we are able to create a system in which dynamical behaviors are similar to the original system. The results demonstrate that the proposed estimation approach is robust to noise and does not require large data or computational resources to be implemented. Also, the performance of the proposed method is appropriate for any type of force interactions between the tip and sample.












Similar content being viewed by others


Change history
15 April 2021
A Correction to this paper has been published: https://doi.org/10.1007/s11071-021-06430-2
Abbreviations
- m :
-
Effective mass of microbeam
- k :
-
Effective stiffness of microbeam
- b s :
-
Equivalent structural damping coefficient
- b v :
-
Equivalent viscous damping coefficient
- y :
-
Vertical displacement of tip
- u :
-
Piezo-based displacement
- f int :
-
Tip–sample interaction force
- ω n :
-
Natural frequency of cantilever
- g :
-
Model parameter
- \(\partial\) :
-
Molecular diameter
- d :
-
Tip–sample distance
- h :
-
Hamaker constant
- r :
-
Cantilever tip radius
- t :
-
Time
- ω :
-
Base excitation frequency
- u 0 :
-
Base excitation amplitude
- μ 1 :
-
Dimensionless effective structural damping coefficient
- μ 2 :
-
Dimensionless effective viscous damping coefficient
- ξ 1 :
-
Dimensionless first state variable
- ξ 2 :
-
Dimensionless second state variable
- L :
-
Dimensionless parameter of length
- \(\overline{\partial }\) :
-
Dimensionless molecular diameter
- γ :
-
Sample surface height in the fix reference frame
- \(\overline{g}\) :
-
Dimensionless model parameter
- Ω:
-
Dimensionless base excitation frequency
- χ :
-
Dimensionless excitation amplitude
- τ :
-
Dimensionless time variable
- \(\overline{\gamma }\) :
-
Dimensionless sample surface height
- x s :
-
Horizontal position of sample surface
- n p :
-
Number of points in a window
- D :
-
Embedding dimension
- τ d :
-
Delay time
- \(\left\{ {\mu_{{{\text{ed}}}} } \right\}_{j}^{i}\) :
-
Mean of Euclidean distance
- λ :
-
Eigenvalue
- f r :
-
Repulsive force
- f w :
-
Attractive van der Waals force
- f e :
-
Electrostatic force
- f c :
-
Capillary force
- l 0 :
-
Intermolecular distance
- κ sv :
-
Solid–vapor interfacial energy
- E tip :
-
Young’s modulus of tip
- E sample :
-
Young’s modulus of sample
- v tip :
-
Poisson's ratio of tip
- v sample :
-
Poisson's ratio of sample
- t w :
-
Thickness of water film
- \(\kappa_{{{\text{H}}_{{2}} {\text{O}}}}\) :
-
Liquid–vapor interfacial energy of water
- ε 0 :
-
Permittivity of free space
- V 0 :
-
Surface potential
References
Binnig, G., Quate, C.F., Gerber, C.: Atomic force microscope. Phys. Rev. Lett. 56(9), 930 (1986)
San Paulo, A., García, R.: High-resolution imaging of antibodies by tapping-mode atomic force microscopy: attractive and repulsive tip-sample interaction regimes. Biophys. J. 78(3), 1599–1605 (2000)
Garcıa, R., Perez, R.: Dynamic atomic force microscopy methods. Surf. Sci. Rep. 47(6–8), 197–301 (2002)
Ruppert, M.G., Moheimani, S.R.: Multimode Q control in tapping-mode AFM: enabling imaging on higher flexural eigenmodes. IEEE Trans. Control Syst. Technol. 24(4), 1149–1159 (2015)
Necipoglu, S., et al.: Robust repetitive controller for fast AFM imaging. IEEE Trans. Nanotechnol. 10(5), 1074–1082 (2011)
Sahoo, D.R., Sebastian, A., Salapaka, M.V.: An ultra-fast scheme for sample-detection in dynamic-mode atomic force microscopy. In: 2004 NSTI Nanotechnology Conference and Trade Show (2004)
Haghighi, M.S., Sajjadi, M., Pishkenari, H.N.: Model-based topography estimation in trolling mode atomic force microscopy. Appl. Math. Model. (2019)
Rashidi, M., Wolkow, R.A.: Autonomous scanning probe microscopy in situ tip conditioning through machine learning. ACS Nano 12(6), 5185–5189 (2018)
Huang, B., Li, Z., Li, J.: An artificial intelligence atomic force microscope enabled by machine learning. Nanoscale 10(45), 21320–21326 (2018)
Javazm, M.R., Pishkenari, H.N.: Observer design for topography estimation in atomic force microscopy using neural and fuzzy networks. Ultramicroscopy (2020)
Kantz, H., Schreiber, T.: Nonlinear Time Series Analysis, vol. 7. Cambridge University Press, Cambridge (2004)
Donner, R.V., Barbosa, S.M.: Nonlinear Time Series Analysis in the Geosciences, Lecture Notes in Earth Sciences, Vol. 112 (2008)
Abarbanel, H.: Analysis of Observed Chaotic Data. Springer, Berlin (2012)
Aniszewska, D., Rybaczuk, M.: Lyapunov type stability and Lyapunov exponent for exemplary multiplicative dynamical systems. Nonlinear Dyn. 54(4), 345–354 (2008)
Sadri, S., Wu, C.Q.: Modified Lyapunov exponent, new measure of dynamics. Nonlinear Dyn. 78(4), 2731–2750 (2014)
Ghafari, S., Golnaraghi, F., Ismail, F.: Effect of localized faults on chaotic vibration of rolling element bearings. Nonlinear Dyn. 53(4), 287–301 (2008)
Cusumano, J.P., Chelidze, D., Chatterjee, A.: A dynamical systems approach to damage evolution tracking, part 2: model-based validation and physical interpretation. J. Vib. Acoust. 124(2), 258–264 (2002)
Chelidze, D., Cusumano, J.P., Chatterjee, A.: A dynamical systems approach to damage evolution tracking, part 1: description and experimental application. J. Vib. Acoust. 124(2), 250–257 (2002)
Chelidze, D., Cusumano, J.P.: Phase space warping: nonlinear time-series analysis for slowly drifting systems. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2006(364), 2495–2513 (1846)
Chelidze, D., Liu, M.: Multidimensional damage identification based on phase space warping: an experimental study. Nonlinear Dyn. 46(1–2), 61–72 (2006)
Nguyen, S.H., Chelidze, D.: New invariant measures to track slow parameter drifts in fast dynamical systems. Nonlinear Dyn. 79(2), 1207–1216 (2015)
Segala, D.B., et al.: Nonlinear smooth orthogonal decomposition of kinematic features of sawing reconstructs muscle fatigue evolution as indicated by electromyography. J. Biomech. Eng. 133(3), 66 (2011)
Dumas, R., Jacquelin, E.: Stiffness of a wobbling mass models analysed by a smooth orthogonal decomposition of the skin movement relative to the underlying bone. J. Biomech. 62, 47–52 (2017)
Mahdavi, M.H., et al.: A more comprehensive modeling of atomic force microscope cantilever. Ultramicroscopy 109(1), 54–60 (2008)
Pishkenari, H.N., Meghdari, A.: Effects of higher oscillation modes on TM-AFM measurements. Ultramicroscopy 111(2), 107–116 (2011)
Schitter, G., Mechit, P., Knapp, H., Allgower, F., Stemmer, A.: High performance feedback for fast scanning atomic force microscopes. Rev. Sci. Instrum 72(8), 3320–3327 (2001)
Pollicott, M., Yuri, M.: Dynamical Systems and Ergodic Theory, vol. 40. Cambridge University Press, Cambridge (1998)
Takens, F.: Detecting Strange Attractors in Turbulence. Lecture Notes in Mathematics, Vol. 898 (1981)
Wallot, S., Mønster, D.: Calculation of average mutual information (AMI) and false-nearest neighbors (FNN) for the estimation of embedding parameters of multidimensional time series in Matlab. Front. Psychol. 9, 1679 (2018)
Marklof, J., Ulcigrai, C.: Dynamical Systems and Ergodic Theory (2010)
Pishkenari, H.N., Jalili, N., Meghdari, A.: Acquisition of high-precision images for non-contact atomic force microscopy. Mechatronics 16(10), 655–664 (2006)
Zitzler, L., Herminghaus, S., Mugele, F.: Capillary forces in tapping mode atomic force microscopy. Phys. Rev. B 66(15), 155436 (2002)
Derjaguin, B., Muller, V., Toporov, Y.P.: Effect of contact deformations on the adhesion of particles. Prog. Surf. Sci. 45(1–4), 131–143 (1994)
Unertl, W.: Implications of contact mechanics models for mechanical properties measurements using scanning force microscopy. J. Vac. Sci. Technol. A Vac. Surf. Films 17(4), 1779–1786 (1999)
Ondarçuhu, T., Fabié, L.: Capillary forces in atomic force microscopy and liquid nanodispensing. In: Surface Tension in Microsystems, pp. 279–305. Springer, Berlin (2013)
Nasrallah, H.: Capillary Adhesion and Friction: An Approach with the AFM Circular Mode. Le Mans, London (2011)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The original online version of this article was revised: The correct spelling of the first author name is Mohammad Rafiee Javazm.
Appendix
Appendix
(A) The equations are simplified to dimensionless form using the dimensionless parameters of time (\(\tau = \omega_{n} t\)) and length (\(\frac{1}{L}\)). The dimensionless parameters used in LJ potential are as follows:
Using these parameters, the equation of motion can be expressed as:
By dividing all terms of Eq. (A-2) by \(mL{{\omega }_{n}}^{2}\) or \(Lk\), the dimensionless form of equation is obtained as follows:
Similarly, the comprehensive tip–sample interaction force model is converted to the dimensionless form as follows:
where the dimensionless form of different force terms is given as:
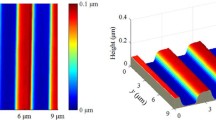
The two topographies, which are used to evaluate the proposed method, are as follows:
(B) In this subsection, we aim to demonstrate why the solution of Eq. (13) is equivalent to the solution of Eq. (12). In the mathematics, the Lagrange multiplier approach can be used to solve problems with multiple constraints. Hence, for Eq. (12), the Lagrange function is defined as follows:
To maximize the Lagrange function (L), its gradient should be determined and set into zero:
(C) In this paper, the mentioned new third-order mapping that uses the current and five next windows is as follows:

where the order of the coefficients is from highest to lowest power. The first row of this matrix is for the current window, the second one is for the next window, and in the same way until the end row that is related to the five ahead window.
Rights and permissions
About this article

Cite this article
Rafiee Javazm, M., Nejat Pishkenari, H. A dynamical approach to topography estimation in atomic force microscopy based on smooth orthogonal decomposition. Nonlinear Dyn 103, 2345–2363 (2021). https://doi.org/10.1007/s11071-021-06256-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-021-06256-y