
Abstract
This manuscript explores the effect of viscoelasticity on static bifurcations: such as pitchfork, saddle-node, and transcritical bifurcations, of a single-degree-of-freedom mechanical oscillator. The viscoelastic behavior is modeled via a differential form, where the extra degree of freedom represents the internal force provided by the viscoelastic element. The governing equations are derived from a simplified lumped parameter model consisting of a rigid rod incorporating a viscoelastic element and subjected to axial and transverse forces at the free end, in addition to an external time-varying moment applied to the rod. In order to study the effect of viscoelasticity on bifurcation diagrams, the equations of motion are non-dimensionalized. Next, a review of static bifurcations in the absence of viscoelasticity is conducted, followed by an examination of the effect of viscoelasticity on the bifurcation diagrams. Finally, this paper investigates the effects of viscoelasticity on the transient behavior of the oscillator. Results show that the Deborah number, which measures the ratio of the viscoelastic time constant to the natural periodic time of the system, controls the duration of time needed to maintain oscillations around an unstable point before jumping to a stable equilibrium point.












Similar content being viewed by others

Notes
At \(\beta =0\), Eq. (2) reduces to \(\frac{{\dot{f}}_\mathrm{v}}{k}+\frac{f_\mathrm{v}}{\eta }=k\dot{\bar{\delta }}\), the force displacement relationship for a Maxwell material. At \(\beta =1\) Eq. (2) reduces to \({\dot{f}}_\mathrm{v}=k\dot{\bar{\delta }}\) or equivalently \(f_\mathrm{v}=k\bar{\delta }\) a purely elastic material. The damping is ignored, and the damping element is not grounded and thus will experience no deformation.
Typically, an imperfect bifurcation is a co-dimension 2 bifurcation in which both the load and imperfection parameter are varied.
References
Florijn, B., Coulais, C., van Hecke, M.: Programmable mechanical metamaterials. Phys. Rev. Lett. 113(17), 175503 (2014)
Coulais, C., Sabbadini, A., Vink, F., van Hecke, M.: Multi-step self-guided pathways for shape-changing metamaterials. Nature 561(7724), 512–515 (2018)
Kempner, J.: Creep bending and buckling of linearly viscoelastic columns (1954)
Minahen, T.M., Knauss, W.G.: Creep buckling of viscoelastic structures. Int. J. Solids Struct. 30(8), 1075–1092 (1993)
Monsia, M.D.: A nonlinear generalized standard solid model for viscoelastic materials. Int. J. Mech. Eng. (Ser. Publ.) 4, 11–15 (2011)
Nachbar, W., Huang, N.C.: Dynamic snap-through of a simple viscoelastic truss. Q. Appl. Math. 25(1), 65–82 (1967)
Cui, S., Harne, R.L.: Characterizing the nonlinear response of elastomeric material systems under critical point constraints. Int. J. Solids Struct. 135, 197–207 (2018)
Kovac Jr., E.J., Anderson, W.J., Scott, R.A.: Forced non-linear vibrations of a damped sandwich beam. J. Sound Vib. 17(1), 25–39 (1971)
Daya, E.M., Azrar, L., Potier-Ferry, M.: An amplitude equation for the non-linear vibration of viscoelastically damped sandwich beams. J. Sound Vib. 271(3–5), 789–813 (2004)
Kosmatka, J.: Damping variations in post-buckled structures having geometric imperfections. In: 51st AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference 18th AIAA/ASME/AHS Adaptive Structures Conference 12th, p. 2630 (2010)
Murray, G.J., Gandhi, F.: The use of damping to mitigate violent snap-through of bistable systems. In: ASME 2011 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, pp. 541–550. American Society of Mechanical Engineers Digital Collection (2011)
Che, K., Rouleau, M., Meaud, J.: Temperature-tunable time-dependent snapping of viscoelastic metastructures with snap-through instabilities. Extreme Mech. Lett. 32, 100528 (2019)
Johnson, E.R.: The effect of damping on dynamic snap-through. J. Appl. Mech. 47(3), 601–606 (1980)
Virgin, L.N., Wiebe, R.: On damping in the vicinity of critical points. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 371(1993), 20120426 (2013)
Wiebe, R., Virgin, I.S., Lawrence, N., Spottswood, S.M., Eason, T.G.: Characterizing dynamic transitions associated with snap-through: a discrete system. J. Comput. Nonlinear Dyn. 8(1), 011010 (2013)
Daqaq, M.F.: New insight into energy harvesting via axially-loaded beams. In: ASME 2009 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. 457–466. American Society of Mechanical Engineers Digital Collection (2009)
Gonçalves, P.B., Santee, D.M.: Influence of uncertainties on the dynamic buckling loads of structures liable to asymmetric postbuckling behavior. In: Mathematical Problems in Engineering, 2008 (2008)
Virgin, L.N.: Vibration of Axially-Loaded Structures. Cambridge University Press, Cambridge (2007)
Cedolin, L., Bažant, Z.P.: Stability of Structures: Elastic, Inelastic, Fracture and Damage Theories. World Scientific, Singapore (2010)
Masana, R., Daqaq, M.F.: Electromechanical modeling and nonlinear analysis of axially loaded energy harvesters. J. Vib. Acoust. 133(1), 011007 (2011)
Parnell, W.J., De Pascalis, R.: Soft metamaterials with dynamic viscoelastic functionality tuned by pre-deformation. Philos. Trans. R. Soc. A 377(2144), 20180072 (2019)
Yeh, S.-L., Harne, R.L.: Origins of broadband vibration attenuation empowered by optimized viscoelastic metamaterial inclusions. J. Sound Vib. 458, 218–237 (2019)
Fung, R.-F., Huang, J.-S., Chen, Y.-C., Yao, C.-M.: Nonlinear dynamic analysis of the viscoelastic string with a harmonically varying transport speed. Comput. Struct. 66(6), 777–784 (1998)
Chen, L.-Q., Zhang, N.-H., Zu, J.W.: Bifurcation and chaos of an axially moving viscoelastic string. Mech. Res. Commun. 29(2–3), 81–90 (2002)
Meyer, G.A., McCulloch, A.D., Lieber, R.L.: A nonlinear model of passive muscle viscosity. J. Biomech. Eng. 133(9), 091007 (2011)
Holzapfel, G.A.: Nonlinear solid mechanics: a continuum approach for engineering science. Meccanica 37(4–5), 489–490 (2002)
Miltz, J., Ramon, O.: Energy absorption characteristics of polymeric foams used as cushioning materials. Polym. Eng. Sci. 30(2), 129–133 (1990)
Puri, T.: Integration of polyurethane foam and seat occupant models to predict the settling point of a seat occupant. Master’s thesis. Purdue University, School of Mechanical Engineering, West Lafayette (2004)
Gibson, L.J., Easterling, K.E., Ashby, M.F.: The structure and mechanics of cork. Proc. R. Soc. Lond. A Math. Phys. Sci. 377(1769), 99–117 (1981)
Gibson, L.J., Ashby, M.F.: Cellular Solids: Structure and Properties. Cambridge University Press, Cambridge (1999)
Le Barbenchon, L., Girardot, J., Kopp, J.-B., Viot, P.: Strain rate effect on the compressive behaviour of reinforced cork agglomerates. In: EPJ Web of Conferences, vol. 183, p. 03018. EDP Sciences (2018)
Lakes, R.: Viscoelastic Materials. Cambridge University Press, Cambridge (2009)
Gomez, M., Moulton, D.E., Vella, D.: Dynamics of viscoelastic snap-through. J. Mech. Phys. Solids 124, 781–813 (2019)
Reiner, M.: The Deborah number. Phys. Today 17(1), 62 (1964)
Strogatz, S.H.: Nonlinear Dynamics and Chaos with Student Solutions Manual: With Applications to Physics, Biology, Chemistry, and Engineering. CRC Press, Boca Raton (2018)
Silva, L.A.: Internal variable and temperature modeling behavior of viscoelastic structures—a control analysis. PhD thesis, Virginia Tech (2003)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
This appendix converts the linear standard viscoelastic element from stress–strain form to a force–displacement form. It presents an internal variable formulation of the governing equations of the system.

Viscoelastic linear standard model with internal variable
1.1 Stress to force
In this work, the additional degree of freedom is the viscoelastic force in the system. Recall the viscoelastic relationship in the linear standard model can be written as
where \(E_1\) and \(E_2\) denote the modulus of the element and \(\mu \) is the viscosity. Now if the moduli \(E_1\) and \(E_2\) are parameterized as \(E_1=(1-\beta )E\) and \(E_2=\beta E\), where E is a base elastic modulus and \(\beta \) is a constant, the strain \(\epsilon =L\sin \theta /b\) where A and b are the cross section area of length of the viscoelastic element, and \(\sigma =f_\mathrm{v}A\), Eq. (A.1) can be written as
1.2 Internal variable description
An alternate description can be obtained using the internal strain in the system. In this description the viscoelastic stress can be written as
where \(\bar{\epsilon }\) is the internal strain [36] and is shown in Fig. 13. These two descriptions are equivalent. This can be shown by taking the derivative of Eq. (A.3) to yield
Now, Eqs. (A.5) and (A.3) can be plugged into Eq. (A.4) to yield
The additional dynamics of the system to viscoelasticity can be represented as \(\sigma \) or \(\bar{\epsilon }\).
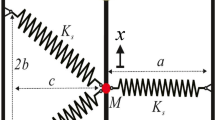
The equation motion of the system in Fig. 2b can be written in terms of internal displacements \({\bar{x}}\) as
when the functions \(\sin \theta \) and \(\cos \theta \) are expanded using a Taylor series, the equations of motion for the system can be written as
Equations in (A.8) and (A.9) are the internal displacement equivalents of Equations (3) and (4).
1.3 Characteristic polynomial
The characteristic polynomial for the Jacobian defined in Eq. 14 can be written as
where
Rights and permissions
About this article

Cite this article
Alhadidi, A.H., Gibert, J.M. A new perspective on static bifurcations in the presence of viscoelasticity. Nonlinear Dyn 103, 1345–1363 (2021). https://doi.org/10.1007/s11071-020-06104-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-020-06104-5