
Abstract
Phased formations of satellites provide an important means of keeping multiple satellites in close proximity without becoming dangerously close to one another. In order to minimize the amount of propellant necessary to keep a set of satellites in a phased formation, this paper presents a new condition for in-plane linearized secular \(J_2\)-invariance in highly eccentric orbits. A maintenance strategy outlined here combats the growth of out-of-plane motion, and the delta-v cost of this strategy is analyzed. For context, this paper also discusses relevant formations that benefit from this condition and maintenance strategy. A highly elliptical perching formation called the “boomerang perch” is also discussed.











Similar content being viewed by others

References
Alfriend, K., Vadali, S.R., Gurfil, P., How, J., Breger, L.: Spacecraft Formation Flying: Dynamics, Control and Navigation, vol. 2. Elsevier, Amsterdam (2009)
Baresi, N., Scheeres, D.J.: Bounded relative motion under zonal harmonics perturbations. Celest. Mech. Dyn. Astron. 127(4), 527–548 (2017a)
Baresi, N., Scheeres, D.J.: Design of bounded relative trajectories in the earth zonal problem. J. Guid. Control Dyn. 40(12), 3075–3087 (2017b)
Breger, L., How, J., Alfriend, K.: Partial J2 invariance for spacecraft formations. In: AIAA Guidance, Navigation, and Control Conference and Exhibit, p. 6585 (2006)
Broucke, R.: Numerical integration of periodic orbits in the main problem of artificial satellite theory. Celest. Mech. Dyn. Astron. 58(2), 99–123 (1994)
Chao, C.C.G.: Applied Orbit Perturbation and Maintenance, Chap 10. American Institute of Aeronautics and Astronautics, Reston (2005)
Chao, C.C., Kirkpatrick, B.E., Lin, V.S.J., Janson, S.W.: Deployment and control algorithms for wheel cluster formations of satellites. US Patent 9,694,917 (2017)
D’Amico, S.: Autonomous formation flying in low earth orbit (2010)
Dang, Z., Wang, Z., Zhang, Y.: Improved initialization conditions and single impulsive maneuvers for J2-invariant relative orbits. Celest. Mech. Dyn. Astron. 121(3), 301–327 (2015)
Draim, J.E.: Satellite constellations. In: 55th International Astronautical Congress (2004)
Fuselier, S., Lewis, W., Schiff, C., Ergun, R., Burch, J., Petrinec, S., Trattner, K.: Magnetospheric multiscale science mission profile and operations. Space Sci. Rev. 199(1–4), 77–103 (2016)
He, Y., Xu, M.: Bounded relative orbits in the zonal gravitational field for formation flying. J. Guid. Control Dyn. 41(7), 1634–1642 (2018)
Lara, M., Gurfil, P.: Integrable approximation of J2-perturbed relative orbits. Celest. Mech. Dyn. Astron. 114(3), 229–254 (2012)
Lyddane, R.: Small eccentricities or inclinations in the Brouwer theory of the artificial satellite. AJ 68, 555 (1963)
Martinuşi, V., Gurfil, P.: Solutions and periodicity of satellite relative motion under even zonal harmonics perturbations. Celest. Mech. Dyn. Astron. 111(4), 387–414 (2011)
Montenbruck, O., Gill, E.: Satellite Orbits: Models, Methods and Applications. Springer, Berlin (2012)
Nie, T., Gurfil, P., Zhang, S.: Analytical conditions for bounded mean inter-satellite distances in the J2 problem. J. Guid. Control Dyn. 41(10), 2144–2162 (2018)
Roscoe, C.W., Vadali, S.R., Alfriend, K.T., Desai, U.P.: Satellite formation design in orbits of high eccentricity with performance constraints specified over a region of interest: MMS phase II. Acta Astron. 82(1), 16–24 (2013)
Schaub, H.: Relative orbit geometry through classical orbit element differences. J. Guid. Control Dyn. 27(5), 839–848 (2004). https://doi.org/10.2514/1.12595
Schaub, H., Alfriend, K.T.: Impulsive feedback control to establish specific mean orbit elements of spacecraft formations. J. Guid. Dyn. Control 24(4), 739–745 (2001a). https://doi.org/10.2514/2.4774
Schaub, H., Alfriend, K.T.: J2 invariant relative orbits for spacecraft formations. Celest. Mech. Dyn. Astron. 79(2), 77–95 (2001b). https://doi.org/10.1023/A:1011161811472
Sengupta, P., Vadali, S.R.: Relative motion and the geometry of formations in Keplerian elliptic orbits with arbitrary eccentricity. J. Guid. Control Dyn. 30(4), 953–964 (2007). https://doi.org/10.2514/1.25941
Vallado, D.A.: Fundamentals of Astrodynamics and Applications, Chap. 3,9, 4 edn. Microcosm Press, Cleveland, pp. 164, 647–652 (2013)
Xu, M., Wang, Y., Xu, S.: On the existence of J2 invariant relative orbits from the dynamical system point of view. Celest. Mech. Dyn. Astron. 112(4), 427–444 (2012)
Acknowledgements
The author thanks Dr. George Pollock, Dr. Andrew Rogers, Jamie Wilson, and Matt Schmit for their mentorship, as well as Dr. Josue Munoz for his advice. The author also thanks the manuscript reviewers for their in-depth suggestions to improve the quality of this paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Derivations
1.1 Chao wheel algorithm
For our alternate derivation of the Chao wheel builder algorithm, one must employ a third imaginary satellite (we shall call it the “virtual chief”) in a circular orbit. Since a superposition principle is used to add the relative motions of the virtual chief with respect to the chief and the deputy with respect to the virtual chief, and formulae for the two satellites relative to a circular virtual chief are employed, the two satellites must be fairly low in eccentricity for their circumnavigation formations relative to the virtual chief to be small and their predicted behavior and superposition to be good assumptions. In this derivation, take \(e_\mathrm{c}, e_\mathrm{d}\) to be the eccentricities of chief and deputy, respectively, while unsubscripted quantities are assumed with respect to the chief, and differential quantities are between the chief and deputy and equal to the same quantity between virtual chief and deputy.
where subscript dc indicates deputy with respect to chief, vc indicates virtual chief with respect to chief, and so on.
Taking Schaub’s equations for a zero eccentricity reference orbit (Schaub 2004) and approximating what would normally be deputy true anomaly f as deputy mean anomaly M, since the deputy and chief, which are viewed as deputies of the virtual chief, are only supposed to be slightly eccentric. All satellites here share the same semi-major axis, and M represents the approximate mean anomaly of both chief and virtual chief:
Supposing for the purpose of centered circumnavigation formations that \(\delta M=-\delta \omega \) and subtracting these motions:
Upon expanding all the additive angles inside trigonometric terms:
Now, recombining terms in a different manner:
Next, solve for \(e_\mathrm{d}\) and \(\delta M\), given that \(\Delta e=\frac{D}{a}\).
1.2 Higher-eccentricity formations
1.2.1 Alternative wheel formation for high eccentricities
From Sengupta and Vadali (2007):
To construct a centered wheel formation, set \(D=Q_1\) and \(Q_2\) such that the in-track axis crossings are equidistant from one another (not equivalent to \(Q2=0\)) and then solve for the differential orbital elements in terms of D and \(\alpha _0\).
To create a formation with radial extrema D and radial phasing (approximate overall phase angle from in-track positive) \(\alpha _0\), Sengupta and Vadali provide the following.
Given \(Q_2\) chosen to center the wheel, solve for \(\delta \omega \):
1.2.2 Alternative wheel formation for high eccentricities—time-centered
Begin with the expressions for \(\delta e\) and \(\delta M\) from the previous section, which are constrained by D and \(\alpha _0\). Choose \(\delta \omega \) to center the formation in a temporal sense.
From Sengupta and Vadali (2007), continue with a condition on \(Q_2\) that corrects a temporal bias in the formation. Then, equate this with the corresponding expression in terms of orbital elements, substituting in the value of \(\delta M\) constrained by the size and phase of the formation, and simplify until \(\delta \omega \) is obtained.
The resulting deputy satellite spends equal times projected onto the positive along-track axis as the negative along-track axis (where along-track is in the direction of chief velocity).
Another highly elliptical formation: the boomerang perch

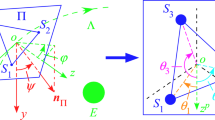
An offset boomerang-shaped orbit resulting from a combination of \(\delta \omega \) and \(\delta M\). Twelve equally time-spaced blue dots are pictured, while the red triangle represents chief perigee passage, and the green square represents chief apogee passage
Another formation of interest consists of a combination of \(\delta \omega \) and \(\delta M\) and attempts to mitigate flight safety problems. This geometry, which we refer to as the “boomerang perch,” chooses the deputy location at chief perigee passage to coincide with its position at chief apogee passage, and as such reduces in-track oscillation for a given distance away from the chief. It is termed a perch for being something of an analogy to an in-track perching (leader–follower) formation in the case of a near circular reference orbit. The boomerang component of the name stems from the resemblance to a boomerang in Fig. 12.
Given the distance y of these two coincident points away from the chief satellite at perigee and apogee, \(\delta \omega \) and \(\delta M\) can be calculated as follows:
The deputy will sweep across the same radial region twice per chief orbital period: one time quickly around chief perigee, and one time slowly around chief apogee, with the ratio of the two sweep durations higher for higher-eccentricity reference orbits. This formation is introduced, in part to demonstrate the efficacy of the modified control algorithm presented on non-wheel-type formations.
The utility of this formation comes from its relatively small ratio of in-track extrema.
where \(y_\mathrm{f}\) is the far in-track extrema and \(y_\mathrm{c}\) is the close in-track extrema. Compare this to the rectilinear perching behavior induced by \(\delta \omega \) alone, or the offset circular behavior induced by \(\delta M\) alone, which both have the following ratio.
From the truncated series expansions, one can see that the boomerang perch’s in-track oscillations grow much more slowly than these other two behaviors as a function of increasing reference eccentricity.
Rights and permissions
About this article

Cite this article
Kulik, J. An in-plane \(J_2\)-invariance condition and control algorithm for highly elliptical satellite formations. Celest Mech Dyn Astr 133, 4 (2021). https://doi.org/10.1007/s10569-021-10003-1
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10569-021-10003-1