
Abstract
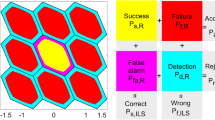
The fast and high-precision positioning with multiple Global Navigation Satellite Systems (multi-GNSS) has been challenging for decades. Although the single-frequency single system (SF-SS), satellite selection for multi-GNSS, and multi-GNSS-based partial ambiguity resolution (PAR) can achieve rapid positioning, the varying theoretical bases of them result in different fixed reliability of ambiguities. Hence, we provide the theory analyzing the ambiguity resolution capabilities of the named systems. By adding satellite observations, the equations giving the variance–covariance matrix variation of the original float parameters are derived. Then, the relationship between the ambiguity dilution of precision (ADOP) values of the original ambiguity vector (OAV) before and after adding observations is obtained. This is followed by the analyses of the changing trends in the OAV’s probability density function, integer least-squares pull-in region, and the R-ratio test-based integer aperture pull-in region. In terms of precision, ADOP, and R-ratio test-based fixed reliability of ambiguities, the analyses indicate that the multi-GNSS can improve the partial ambiguity estimation and validation. Besides, compared to satellite selection and SF-SS, the PAR is optimal. The BeiDou Navigation Satellite System (BDS) and the Global Positioning System (GPS)-based single-epoch positioning experiments showed that both BDS B1 and B1-based PAR outperform GPS L1 and L1-based PAR in terms of ADOP and R-ratio test-based fixed reliability. The ADOP of the former is smaller than 0.14, and both the R-ratio test-based acceptance and success rates are up to 99.64%. Finally, the false alarm, failure, and detection rates are reduced to 0.34%, 0.0%, and 0.02%, respectively.













Similar content being viewed by others

Data availability
The data used for this research were from the HKPC and HMW stations of the Hong Kong Base Station, China, on February 5, 2019 (https://www.geodetic.gov.hk/en/rinex/downv.aspx).
Change history
26 February 2021
The non-standard references below each references are deleted
References
Brack A (2017) Reliable GPS+BDS RTK positioning with partial ambiguity resolution. GPS Solut 21(3):1083–1092
Duangduen R, Hassan A (2009) A multi-constellations satellite selection algorithm for integrated global navigation satellite systems. J Intell Transport S 13(3):127–141
He H, Li J, Yang Y, Xu J, Guo H, Wang A (2014) Performance assessment of single- and dual-frequency BeiDou/GPS single-epoch kinematic positioning. GPS Solut 18(3):393–403
Horn R, Johnson C (1999) Matrix Analysis. Cambridge University Press, Cambridge, pp 122, 279-290
Lancaster P, Tismenetsky M (1985) The theory of matrices with applications. Academic Press, San Diego
Li B, Shen Y (2009) Fast GPS ambiguity resolution constraint to available conditions. Geomat Inf Sci Wuhan Univ 34(1):117–121
Li J, Yang Y, Xu J, He H, Guo H (2015) GNSS multi-carrier fast partial ambiguity resolution strategy tested with real BDS/GPS dual- and triple-frequency observations. GPS Solut 19(1):5–13
Liu X, Zhang S, Zhang Q, Ding N, Yang W (2019) A fast satellite selection algorithm with floating high cut-off elevation angle based on ADOP for instantaneous multi-GNSS single-frequency relative positioning. Adv Space Res 63(3):1234–1252
Odijk D, Teunissen P (2008) ADOP in closed form for a hierarchy of multi-frequency single-baseline GNSS models. J Geod 82(8):473–492
Odolinski R, Odijk D, Teunissen P (2014) Combined GPS and BeiDou instantaneous RTK positioning. Navigation 61(2):135–148
Odolinski R, Teunissen P (2016) Single-frequency, dual-GNSS versus dual-frequency, single-GNSS: a low-cost and high-grade receivers GPS-BDS RTK analysis. J Geod 90(11):1255–1278
Odolinski R, Teunissen P, Odijk D (2013) An analysis of combined COMPASS/BeiDou-2 and GPS single- and multiple-frequency RTK positioning. Proc. ION PNT 2013, Institute of Navigation, Honolulu, Hawaii, USA, April 23-25, 69-90
Odolinski R, Teunissen P, Odijk D (2015) Combined BDS, Galileo, QZSS and GPS single-frequency RTK. GPS Solut 19(1):151–163
Tang W, Li D, Chi F (2013) Research on single epoch orientation algorithm of BeiDou navigation satellite system. Geomat Inf Sci Wuhan Univ 38(9):1014–1017
Teunissen P (1995) The least-squares ambiguity decorrelation adjustment: a method for fast GPS integer ambiguity estimation. J Geod 70(1–2):65–82
Teunissen P (1997) A canonical theory for short GPS baselines. Part IV: precision versus reliability. J Geod 71:513–525
Teunissen P, Joosten P, Tiberius C (1999) Geometry-free ambiguity success rates in case of partial fixing. Proc. ION NTM 1999, Institute of Navigation, San Diego, CA, USA, January 25-27, 201-207
Teunissen P, Odolinski R, Odijk D (2014) Instantaneous BeiDou+GPS RTK positioning with high cut-off elevation angles. J Geod 88(4):335–350
Teunissen P, Verhagen S (2009) The GNSS ambiguity ratio-test revisited: a better way of using it. Survey Rev 41(312):138–151
Verhagen S (2003) On the approximation of the integer least-squares success rate: which lower or upper bound to use? J Global Position Syst 2(2):117–124
Verhagen S, Teunissen P (2006a) New global navigation satellite system ambiguity resolution method compared to existing approaches. J Guid Control Dynam 29(4):981–991
Verhagen S, Teunissen P (2006b) On the probability density function of the GNSS ambiguity residuals. GPS Solut 10(1):21–28
Verhagen S, Teunissen P (2013) The ratio test for future GNSS ambiguity resolution. GPS Solut 17(4):535–548
Wang L, Feng Y, Guo J (2017) Reliability control of single-epoch RTK ambiguity resolution. GPS Solut 21(2):591–604
Yang Y, Li J, Xu J, Tang J, Guo H, He H (2011) Contribution of the Compass satellite navigation system to global PNT users. Chinese Sci Bull 56(26):2813–2819
Yi T, Li H, Gu M (2013) Experimental assessment of high-rate GPS receivers for deformation monitoring of bridge. Measurement 46(1):420–432
Acknowledgements
The authors are very grateful for the comments and remarks of the reviewers who helped to improve the manuscript. This work was supported by the National Key R&D Program of China (Grant No. 2017YFE0119600), National Natural Science Foundation of China (Grant No. 42074226), and Advantaged Discipline Construction Project of University in Jiangsu Province (Surveying and Mapping Science and Technology Discipline).
Author information
Authors and Affiliations
Corresponding authors
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A: The proof of positive definiteness of matrices A 1 and A 2 in (10)
Appendix A: The proof of positive definiteness of matrices A 1 and A 2 in (10)
For the symmetrical positive definite matrix \({\varvec Q}_{{{{\hat{b}\hat{b}}}}}\), there is a 3-order real invertible matrix \({\varvec S}_{{\text{1}}}\) making \(\varvec{Q}_{{\hat{b} \hat{b}}} = \varvec{S}_{1}^{ {T}} \cdot \varvec{S}_{1}\) (Horn and Johnson 1999). Hence, considering the positive definite matrix \({\varvec P}_{{\text{2}}}^{{{\text{ - 1}}}}\), \(\forall {\varvec{x}} \ne {\bf{0}}\), it holds that \(\varvec{x}^{T} \left( {\varvec{P}_{2}^{{ - 1}} + \varvec{A}_{3} \varvec{Q}_{{\hat{b}\hat{b}}} \varvec{A}_{3}^{T} } \right)\varvec{x}\, > \;0\). Thus, \(\varvec{P}_{2}^{{ - 1}} \; + \;\varvec{A}_{3} \varvec{Q}_{{\hat{b}\hat{b}}} \varvec{A}_{3}^{T}\) is a symmetrical positive definite matrix. Similarly, there is a real invertible matrix S2 making \(\left( {\varvec{P}_{2}^{{ - 1}} + \varvec{A}_{3} \varvec{Q}_{{\hat{b}\hat{b}}} \varvec{A}_{3}^{T} } \right)^{{ - 1}} = \varvec{S}_{2}^{T} \cdot \varvec{S}_{2}\) and \(\varvec{A}_{1} = \left( {\varvec{S}_{2} \varvec{A}_{3} \varvec{Q}_{{\hat{b}\hat{b}}} } \right)^{T} \cdot \varvec{S}_{2} \varvec{A}_{3} \varvec{Q}_{{\hat{b}\hat{b}}}\), and it holds that rank\(\left( {\varvec{S}_{2} \varvec{A}_{3} \varvec{Q}_{{\hat{b}\hat{b}}} } \right)\) = rank (A3) and rank (A3)≤ 3. When rank (A3) = 3, A1 is a positive definite matrix, and for rank (A3) < 3, A1 is a positive semidefinite matrix.
Hence, there is a 3-order real matrix S3 making \(\varvec{A}_{1} = \varvec{S}_{3}^{T} \cdot \varvec{S}_{3}\) and \(\varvec{A}_{2} = \left( {\varvec{S}_{3} \varvec{B}_{1}^{T} \varvec{B}_{{1,\;\lambda }}^{{ - 1}} } \right)^{T} \cdot \varvec{S}_{3} \varvec{B}_{1}^{T} \varvec{B}_{{1,\;\lambda }}^{{ - 1}}\). For the 3 x n-order matrix \({\varvec{S}}_{3} {\varvec{B}}_{1}^{T} {\varvec{B}}_{{1,\;\lambda }}^{{ - 1}}\), it holds that rank \(\left( {\varvec{S}_{3} \varvec{B}_{1}^{T} \varvec{B}_{{1,\;\lambda }}^{{ - 1}} } \right) \le \min ~\left\{ {rank\left( {\varvec{S}_{3} } \right),\;rank\left( {\varvec{B}_{1}^{T} } \right)} \right\} < n\). Therefore, A2 is a positive semidefinite matrix.
End of Proof.
Rights and permissions
About this article

Cite this article
Liu, X., Zhang, S., Zhang, Q. et al. Theoretical analysis of the multi-GNSS contribution to partial ambiguity estimation and R-ratio test-based ambiguity validation. GPS Solut 25, 52 (2021). https://doi.org/10.1007/s10291-020-01080-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-020-01080-0