
Abstract
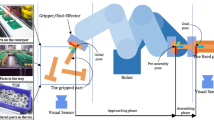
Task-Parameterized Learning from Demonstrations (TP-LfD) is an intelligent intuitive approach to support collaborative robots (cobots) for various industrial applications. Using TP-LfD, human’s demonstrated paths can be learnt by a cobot for reproducing new paths for the cobot to move along in dynamic situations intelligently. One of the challenges to applying TP-LfD in industrial scenarios is how to identify and optimize critical task parameters of TP-LfD, i.e., frames in demonstrations. To overcome the challenge and enhance the performance of TP-LfD in complex manufacturing applications, in this paper, an improved TP-LfD approach is presented. In the approach, frames in demonstrations are autonomously chosen from a pool of generic visual features. To strengthen computational convergence, a statistical algorithm and a reinforcement learning algorithm are designed to eliminate redundant frames and irrelevant frames respectively. Meanwhile, a B-Spline cut-in algorithm is integrated in the improved TP-LfD approach to enhance the path reproducing process in dynamic manufacturing situations. Case studies were conducted to validate the improved TP-LfD approach and to showcase the advantage of the approach. Owing to the robust and generic capabilities, the improved TP-LfD approach enables teaching a cobot to behavior in a more intuitive and intelligent means to support dynamic manufacturing applications.
















Similar content being viewed by others

References
Alizadeh, T., & Karimi, N. (2018). Exploiting the task space redundancy in robot programming by demonstration. In the Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation, Changchun
Alizadeh, T., Malekzadeh, M. (2016). "Identifying the relevant frames of reference in programming by demonstration using task-parameterized Gaussian mixture regression," In the Proceedings of the 2016 IEEE/SICE International Symposium on System Integration, Sapporo
Bay, H., Tuytelaars, T., & Gool, L.V. (2006). "SURF: Speeded Up Robust Features," In The proceedings of the European conference on computer vision
Calinon, S. (2016). A tutorial on task-parametrized movement learning and retrieval. Intelligent Service Robotics, 9(1), 1–29.
Chouai, M., Merah, M., Sancho-Gomez, J.-L., & Mimi, M. (2019). Supervised feature learning by adversarial autoencoder approach for object classification in dual X-ray image of luggage. Journal of Intelligent Manufacturing, 31(5), 1101–1112.
Duque, D. A., Prieto, F. A., & Hoyos, J. G. (2019). Trajectory generation for robotic assembly operations using learning by demonstration. Robotics and Computer Integrated Manufacturing, 57, 292–302.
Ghalamzan, A. M., & Ragaglia, M. (2018). Robot learning from demonstrations: Emulation learning in environments with moving obstacles. Robotics and Autonomous Systems, 101, 45–56.
Girgin, H., Pignat, E., Jaquier, N., & Calinon, S. (2020) "Active improvement of control policies with Bayesian Gaussian mixture model," In The proceedings of the IEEE international conference on robotics and intelligent systems
Goodfellow, I., Bengio, Y., & Courville, A. (2016). Deep Learning (p. 64). Cambridge: MIT Press.
Gu, Y., Sheng, W., Crick, C., & Ou, Y. (2018). Automated assembly skill acquisition and implementation through human demonstration. Robotics and Autonomous Systems, 99, 1–16.
Huang, Y., Silverio, J., Rozo, L., & Caldwell, D. G. (2018). "Generalized task-parameterized skill learning," In the Proceedings of the 2018 IEEE international conference on robotics and automation (ICRA)
Jia, Z., Lin, M., Chen, Z., & Jian, S. (2020). Vision-based robot manipulation learning via human demonstrations, arXiv:2003.00385
Joshi, K. D., Chauhan, V., & Surgenor, B. (2018). A flexible machine vision system for small part inspection based on a hybrid SVM/ANN approach. Journal of Intelligent Manufacturing, 31(1), 103–125.
Kim, D.-Y., Park, J.-W., Baek, S., Park, K.-B., Kim, H.-R., Park, J.-I., et al. (2019). A modular factory testbed for the rapid reconfiguration of manufacturing systems. Journal of Intelligent Manufacturing, 31(3), 661–680.
Koc, O., & Peters, J. (2019). Learning to serve: an experimental study for a new learning from demonstrations framework. IEEE Robotics and Automation Letters, 4(2), 1784–1791.
Malekzadeh, M. S., Queißer, J. F., & Steil, J. J. (2019). Multi-level control architecture for Bionic Handling Assistant robot augmented by learning from demonstration for apple-picking. Advanced Robotics, 33(9), 469–485.
Muja, M., & Lowe, D. G. (2009). "Fast approximate nearest neighbors with automatic algorithm configuration," In The proceedings of the international conference on computer vision theory and applications
Paxton, C., Hundt, A., Jonathan, F., Guerin, K., & Hager, G. D. (2017). CoSTAR: Instructing collaborative robots with behavior trees and vision. In The proceedins of the IEEE international conference on robotics and automation (ICRA)
Penumuru, D. P., Muthuswamy, S., & Karumbu, P. (2019). Identification and classification of materials using machine vision and machine learning in the context of industry 4.0. Journal of Intelligent Manufacturing, 31(5), 1229–1241.
Perez-D'Arpino, C., & Shah, J.A. (2017). C-LEARN: Learning geometric constraints from demonstrations for multi-step manipulation in shared autonomy. In The proceedings of the IEEE international conference on robotics and automation (ICRA)
Realyvásquez-Vargas, A., Arredondo-Soto, K. C., García-Alcaraz, J. L., Márquez-Lobato, B. Y., & Cruz-García, J. (2019). Introduction and configuration of a collaborative robot in an assembly task as a means to decrease occupational risks and increase efficiency in a manufacturing company. Robotics and Computer-Integrated Manufacturing, 57, 315–328.
Redmon, J. & Farhadi, A. (2018). "YOLOv3: An incremental improvement," arXiv:1804.02767.
Rogowski, A., & Skrobek, P. (2020). Object identification for task-oriented communication with industrial robots. Sensors, 20(6), 1773.
Sena, A., Michael, B., & Howard, M. (2019). "Improving Task-Parameterised Movement Learning Generalisation with Frame-Weighted Trajectory Generation," In The proceedings of the 2019 IEEE/RSJ international conference on intelligent robots and systems (IROS)
Shi, P., Qi, Q., Qin, Y., Scott, P. J., & Jiang, X. (2020). A novel learning-based feature recognition method using multiple sectional view representation. Journal of Intelligent Manufacturing, 31(5), 1291–1309.
Tamas, L., & Murar, M. (2019). Smart CPS: vertical integration overview and user story with a cobot. International Journal of Computer Integrated Manufacturing, 32(4–5), 504–521.
Tareen, S.A.K., & Saleem, Z. (2018). "A comparative analysis of SIFT, SURF, KAZE, AKAZE, ORB, and BRISK," In the Proceedings of the 2018 international conference on computing, mathematics and engineering technologies - iCoMET 2018
Vogt, D., Stepputtis, S., Grehl, S., Jung, B., & Amor, H.B. (2017). A system for learning continuous human-robot interactions from human-human demonstrations. In The Proceedings of the IEEE international conference on robotics and automation (ICRA)
Xie, F., Chen, L., Li, Z., & Tang, K. (2020). Path smoothing and feed rate planning for robotic curved layer additive manufacturing. Robotics and Computer-Integrated Manufacturing, 65, 101967.
Zaatari, S. E., Marei, M., Li, W. D., & Usman, Z. (2019). Cobot programming for collaborative industrial tasks: An overview. Robotics and Autonomous Systems, 116, 162–180.
Zaatari, S.E., Li, W. D., & Usman, Z. (2020) " Ring Gaussian mixture modelling and regression for collaborative robot", submitted to Robotics and Autonomous Systems
Zheng, S. (2020). Design of intelligent manufacturing product identification and detection system based on machine vision, In the Proceedings of the international conference on cyber security intelligence and analytics, pp. 258–265
Acknowledgements
This research is funded by the Coventry University, the Unipart Powertrain Application Ltd. (U.K.), the Institute of Digital Engineering, U.K., and a research project sponsored by the National Natural Science Foundation of China (Project No. 51975444). We would also acknowledge reviewers for their valuable and constructive comments for us to improve the manuscript.
Funding
The funders had no role in the design of the study, in the collection, analyses, or interpretation of data, in the writing of the manuscript, or in the decision to publish the results.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Zaatari, S.E., Wang, Y., Hu, Y. et al. An improved approach of task-parameterized learning from demonstrations for cobots in dynamic manufacturing. J Intell Manuf 33, 1503–1519 (2022). https://doi.org/10.1007/s10845-021-01743-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10845-021-01743-w