
Abstract
The contributions of the current analytical models on the prediction of the stability of the slope subjected to slide head toppling failure mechanisms, have always focused on the idealized geometry comprising regular blocks dipping into the slope face. Besides, the influence of groundwater and stabilizations from the lowermost block of the slope have been overlooked in the available literature. In this article, the analytical solutions that incorporates the kinematic mechanisms of the jointed rock slope under the influence of groundwater and stabilizing the lowermost block subjected to slide head toppling are derived based on the limit equilibrium. Furthermore, a real slide head toppling failure case history was studied to illustrate the effectiveness of the presented analytical solutions. The investigation results indicate that the presence of groundwater in the jointed rock slope, lowers the distributions of the normal and shear forces thereby inducing slide head toppling. Reinforcing the lowermost block of the slope, enhances the distributions of the normal and shear forces thus improving the stability of the jointed rock slope. The study results depict that the presented analytical solutions can provide an accurate and efficient stability analyses of the jointed rock slope subjected to slide head toppling failure mechanisms considering the presence of groundwater and stabilization effects.
Similar content being viewed by others


Introduction
In slope engineering field, understanding of rock slope failure mechanisms has increased considerably during the last four decades in response to the continued development of the commercial dams, highways, steep surface mine slopes, bridges and urban populations in mountainous areas. It is a well-known fact that analytical methods for analyzing sliding failure mechanisms of the rock slope are vigorous and adequate in the existing geotechnical literature [1,2,3]. Compared to sliding failure mechanisms, the analytical methods for analysing failure mechanisms by slide head toppling failure mechanisms that exists are not robust [4,5,6,7,8,9].
Although much efforts have been made in the current analytical models for the prediction of the stability of the jointed rock slope subjected to slide head toppling failure mechanisms, their contributions are based on the idealized geometry comprising regular blocks dipping into the slope face. Besides, the discontinuity bounding the potential toppling blocks is assumed to be regular running from the topmost surface of the slope model, and then daylighting near the toe of the slope. However, in some physical situations [10,11,12], the discontinuity bounding the potential slide head toppling blocks maybe irregular due to the variation of geological conditions. In that case, the potential discontinuity bounding the potential toppling blocks may be counter-tilted within the rock mass due to the changes in the geological characteristics and daylights on an unanticipated point on the face of the slope as shown in Figs. 1 and 2. This may lead to mixed failure mechanisms involving toppling and other failure mechanisms i.e. block-flexure toppling, toppling-circular and slide head toppling [13,14,15,16,17].

Post-failure photograph of slide head toppling failure of the jointed rock slope in Zhongliang reservoir bank, China [11]

The Valencia Open Surface mine with the slide-head-toppling in Spain [8]
This article places emphasis on the mixed failure mechanisms involving slide head toppling failure mechanisms. The source of errors in the current analytical models could be on the assumptions of the weak plane bounding the potential failure blocks. Yet, slide head toppling failure is still commonly experienced in sedimentary rock formation in many commercial dams, highways and surfaces mine slopes around the world [18,19,20,21]. Besides, very few scholars have conducted research on mixed failure modes involving sliding of the toe region and toppling of the blocks on the upper section of the slope.
It is flawed to evaluate the stability of the jointed rock slope susceptible to slide head toppling using the current analytical model. Bowa and Xia 2019 [12], proposed an analytical models based on a 2D Model that apply basic trigonometry principles to resolve the geometry of the jointed rock slope with counter-tilted discontinuity subjected to slide head block toppling failure mechanisms. Then, an iterative process followed in which forces acting on each block are determined. Thereafter, the stability of each block dipping into the face of the slope are resolved using limit equilibrium approach. The computation process starts from the set of blocks on the upper reaches, followed by the set of blocks on the middle section and ending with the set of blocks on the lower reaches of the slope. Comparisons between stability against toppling and sliding of each block are made, with the maximum forces of these two values dictating the failure mechanisms of the next block. The overall slope is considered unstable if the lowermost block is either sliding or toppling. There are several factors that have been overlooked in the current analytical models that includes joint infill materials, joint spacing, persistency, size of the block, geometry of the block, groundwater, stabilizations from the lowermost block. In this article, the groundwater and stabilization effects on the potential toppling and sliding blocks were overlooked in their proposed analytical model [22,23,24] have been discussed. An improved analytical model is hence necessary that incorporates the kinematic mechanisms of the jointed rock slope with counter-tilted discontinuity subject to mixed failure mechanisms involving slide head toppling under the effect of groundwater and stabilizing influence on the lower block based on limit equilibrium methods.
The rest of this paper is organized as follows. The analytical solutions that incorporates the kinematic mechanisms of the jointed rock slope subjected to slide head toppling are derived based on the limit equilibrium. This accounts for the influence of groundwater and stabilizing the lowermost block. Furthermore, a real slide head toppling failure, a case history of Nchanga open pit was studied to validate the effectiveness of the presented analytical solutions. Then, parametric studies to investigate the influences of the groundwater on the distribution of normal and shear forces, and the effects of stabilizing the lowermost block on the distributions of the normal and shear forces on the stability of the jointed rock slope subjected to slide head toppling were analyzed.
Derivations of the analytical models
The schematic diagram illustrating the slide head toppling of the jointed rock slope with counter-tilted weak plane bounding the potential failure blocks under the influence of the groundwater is shown in Fig. 3. The 2D model consists of rectangular blocks numbered from the toe accumulating upwards with block width denoted \( \Delta x \) and block height denoted \( yn \) dipping at \( \psi d \) into the face of the slope in an orderly manner. The blocks that are dipping into the face of the slope are bounded by the weak plane running from the topmost surface of the slope, and then counter-tilted within the rock mass on the intermediate section. The counter-tilted weak plane is daylighting on the face of the slope. The dipping angles of the weak plane before and after counter-tilted are \( \psi p \) and \( \psi c \) respectively. Geometries of the jointed slope include; the height of the slope denoted as H, slope face angle denoted as \( \psi f \), the upper face slope angle denoted as \( \psi s \) and other constants denoted as \( a1 \),\( a2 \), \( b \). The influences of groundwater and stabilizing effect on the lowermost block of the jointed rock slope subjected to slide-head-toppling have been considered in this model.

Groundwater forces, reinforcement forces and moments acting on the jointed rock slope subjected to slide-head-toppling mechanism
Rock slope geometry
In order to examine the stability of the slope subjected to slide-head-toppling failure mechanisms, the geometry of the slope ought to be resolved using the basic trigonometry principles. The geometry of the jointed slope is resolved by first approximating the angle of the bases of the rock blocks subjected to the failure modes. Scholars [25,26,27] indicated that the toppling blocks tend to be stepped on the base planes and the approximation of the base plane angle is usually taken as the sum of the initial weak plane angle and the stepped angle which varies between 10° and 30°. Considering the weak plane angle during toppling failure, variations of stepped angles and the counter-tilted angle, the angle of the base planes (\( \psi b \)) is estimated using Eq. 1.
The approximated angle of the base planes (\( \psi b \)), is then used for estimating the number of rectangular blocks, dipping into the slope using Eq. 2.
The height of the nth block, the \( yn \) below the crest of the slope is resolved using Eq. 3 while the height of the nth block, the \( yn \) above the crest of the slope is resolved using Eq. 4.
The constants \( a1 \), \( a2 \), \( b \) are resolved using by Eqs. (5-7) respectively;
Other typical dimensions of the rock blocks needed to be resolved prior to conducting block stability analysis are the application points denoted \( Mn \) and \( Ln \) shown in Fig. 4. Goodman and Shi [28] presented a simplistic set of analytical equations to resolve the application points Mn and Ln. The analytical equations are reproduced in Eqs. (8-12) to compute the application points. When the nth blocks are below the crest, then \( Mn \) and \( Ln \) are resolved using Eqs. (8, 9) respectively.

Limiting equilibrium conditions for failure modes of the nth block: a Forces acting on the potential stable block; b Forces acting on the potential toppling block; c Forces acting on the potential sliding block
When the nth block is the crest, then \( Mn \) and \( Ln \) are resolved using Eqs. (10 - 11) respectively.
When the nth block is above the crest, then \( Mn \) and \( Ln \) are resolved by Eqs. (12-13) respectively.
Stability of the rock blocks
In Fig. 4a, the rock columns on the upper section of the slope are classified as stable considering that the center of gravity lies within the base of the rock columns. On the intermediate section of the jointed rock slope shown in Fig. 4b, the center of gravity lies outside the base plane of the rock columns and the possibility of toppling failure mechanisms is high. On the lower section of the jointed rock slope in Fig. 4c, there are high possibilities of rock columns undergoing failure mechanisms by sliding. This is because the height to width ratio of each rock column is presumably greater than unitary and each block is receiving the toppling force from the intermediate section. The internal friction of the rock mass and friction angles between rock columns vary depending on the characteristics of the local lithology. In this article, it is assumed that the friction angle between the rock columns ((\( \phi d \)) and the friction angles on the weak planes bounding the potential failure blocks are equal ((\( \phi p = \phi c \)). By applying the limit equilibrium analysis method, the shear forces on each rock block are computed using the derived Eqs. 14-15. Considering the perpendicular and side friction angles to the two bases (\( \psi p \), \( \psi c \)) of a rock column with weight, \( Wn \), the resulting normal and shear forces are computed using Eqs. 16-17 respectively.
.
The forces \( Pn,t \) required to prevent toppling of block n considering the initial and counter-tilted angle of the weak plane in a situation where the rock column is under rotational equilibrium state, are computed using Eqs. (18-19) respectively. For Equations derivations refer to Appendix 1 Eqs A1.1- A1.10.
In a case where the rock column on the lower section of the slope is determined to be undergoing sliding failure mechanisms, the magnitude forces, \( Pn,s \), neccesary to prevent sliding of rock colunmn n taking into account initial and counter-tilted angle of the weak plane is computed using Eqs. (20-21) respectively. For Equations derivations refer to Appendix 2 Eqs A2.1- A2.16.
Block stability considering the influence of the groundwater
In some physical situations, groundwater exists as an external force that may be acting on the slope and may influence the stability of the jointed rock slope subjected to slide head toppling failure mechanisms. In this article, it is assumed that the joint persistency is low and does not allow groundwater to drain off at the face of the slope. It is envisaged that there high transient water pressures will develop. It was further assumed that the rock mass in the model has low conductivity and high water pressures was possible. It is therefore necessary to incorporate its effect on the stability of the slope in the existing analytical model. Figure 5a, b show three groundwater forces (\( V1 \), \( V2 \), \( V3 \)) and as well as the forces \( Pn \) and \( Pn - 1 \) produced by the blocks above and below the crest of the jointed rock slope. The current Equations are then modified by incorporating the groundwater forces and resolving all the forces normal and parallels to the base of the blocks based on limit equilibrium principles. Considering the weight of the nth block and the perpendicular and sides friction angles on the weak plane bounding the nth block, and the presence of groundwater on both sides.

slide-head-toppling mechanism with external forces: a Forces acting on a typical nth block above crest b Forces acting on a typical nth block below crest
Then the total normal forces before counter-tilting of the weak plane is resolved using Eq. 22 and after counter-tilting of the weak plane is resolved using Eq. 23 respectively.
Considering the weight of the nth block and the perpendicular and sides friction angles on the weak plane bounding the nth block, then the total shear forces before counter-tilting of the weak plane is resolved using Eq. 24 and after counter-tilting of the weak plane is resolved using Eq. 25 respectively.
.
When the rock block has potential of undergoing toppling failure mechanisms under the influence of groundwater forces, then the magnitude \( Pn,t \) to cause toppling of block n under limit equilibrium condition before counter-tilting of the weak plane is resolved using Eq 26. When the weak plane is counter-tilted, then the magnitude \( Pn,t \) to cause toppling of block n under limit equilibrium condition is resolved using Eq. 27.
When the rock block has potential of undergoing sliding failure mechanisms under the influence of groundwater forces (while ignoring the influence of intact rock/mass parameters, like joint spacing) then the magnitude \( Pn,s \) to cause sliding of block n under limit equilibrium condition before counter-tilting of the weak plane is resolved using Eq. 28. When the weak plane is counter-tilted, then the magnitude \( Pn,s \) to cause sliding of block n under limit equilibrium condition is resolved using Eq. 29.
where, \( V1 = \frac{1}{2}\gamma W\cos \psi p.y1 \); \( V2 = \frac{1}{2}\gamma W\cos \psi p(y1 + y2)\vartriangle x \) and \( V3 = \frac{1}{2}\gamma W\cos \psi py2^{2} \).
The stability analyses of the blocks under the influence of groundwater based on the limit equilibrium stability analysis then proceeds as before using the modified versions for forces \( Pn,t \) and \( Pn,s \) as demonstrated in Eqs. 28 and 29 respectively.
Anchor force required to stabilize a slope with groundwater
For the stability of the toppling slope to be improved, reinforcing the lowermost unstable block using anchors and bolts is a common remedial measure (Wyllie [22]). The optimum anchor force is determined using analytical methods based on limit equilibrium principles for comparative cost valuations. Considering the plunge angle \( \psi T \) at which the anchor cable is reinforced through the lowermost block at a distance \( L1 \) above the toe of the slope. The stability analyses of the jointed rock slope subjected to sliding/toppling of blocks has been conducted considering the influence of groundwater and stabilizing effect on the lowest block. The optimum anchor force required to stabilize the toppling blocks considering the influence of groundwater effect before counter-tilting of the weak plane is resolved using Eq. 30 and after counter-tilting of the weak plane the optimum anchor force required to stabilize the toppling blocks considering the influence of groundwater effect is resolved using Eq. 31 respectively.
The optimum anchor force required to stabilize the sliding blocks considering the influence of groundwater effect before counter-tilting of the weak plane is resolved using Eq. 32 and after counter-tilting of the weak plane is resolved using Eq. 33 respectively.
Once the force T is applied to the lowermost block under the influence of groundwater based on limit equilibrium method, the normal forces on the sides of the blocks and the base bounding the potential failure blocks before and after counter-tilting of the weak plane are resolved using Eqs. 34 and 35 respectively,
When the force T is applied to the lowermost block under the influence of groundwater based on limit equilibrium method, the shear forces on the sides of the blocks and base bounding the potential failure blocks before and after counter-tilting of the weak plane are resolved using Eqs. 36 and 37 respectively,
Engineering applications: North wall of Nchanga Open Pit Mine
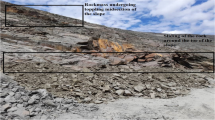
A typical example of slide head toppling failure of the jointed rock slope is a surface mine slope at Nchanga Open Pit in Zambia shown in Fig. 6. Figure 6, indicates a set of stable blocks in the Dolomite rock formations on the topmost surface, a set of toppling blocks in the Shale with Grit formations on the intermediate section and set of sliding blocks in the variations of Shale with Grit types 1,2 and 3 rock formation. The geological settling of the Nchanga open pit is shown in Fig. 7. It is presumed that the toppling blocks are bounded by the weak plane on the intermediate sections of the slope. The sliding blocks in the variations of Shale with Grit types 1,2 and 3 rock formation zone are bounded by the potential counter-tilted weak plane shown in Fig. 7. Structurally, the Nchanga Syncline regional structure trending east–west and plunging at 5°-7° to the north controls the Nchanga Stratigraphy. The Nchanga Open Pit’s South limb has shallow dipping of between 25° and 35° due north with local variation of shallow to steep dips while north limb dips at 60°. The sub-surface geology and characteristics of Nchanga Open pits from the topmost surface to the bottom is provided in Table 1. However the porosity, average permeability of each rock unit and joint characteristics were not available and not included in this table. Slide head toppling failure occurred in shale with grit formation. At Nchanga open pit, Cobalt and Copper ore is hosted in Feldspathic Quartzite formation.

Geology setting at the rock slope site

Post-failure photograph of slide head toppling of Northwall of the Nchanga Open Pits
Resolving the slope geometry
Considering the initial weak plane angle that is counter-tilted in the intermediate section of the slope, the angle of the base planes is estimated using Eq. 1 as 55°. The number of blocks dipping into the face of the slope is estimated using Eq. 2 as 14. The height of the nth block below and above the crest are resolved using Eqs. 3 and 4 respectively. The constants \( a1 \), \( a2 \) and \( b \) are computed using Eqs. 5, 6 and 7 as 5, 5 and 1 respectively. The geometries of the failed slope are shown in the conceptual model in Fig. 8. Stabilization of the toe of the slope prior to failure is considered in the conceptual model.

Conceptual slope model and its geometry
Resolving of application points
However, the analytical models by Goodman and Shi [28] presented in Eqs. 8-13 for resolving the positions of the application points Mn and Ln are considered to be very conservative.
With some laboratory tests conducted by Aydan and Kawamoto [30]; their results showed that the position of the application point of force on the (n + 1) th block is given in the general form of \( Mn = \chi .hn \), while Ln is a function of failure mode. In the case where only block toppling failure mechanisms of the slope occurs, Goodman and Bray [29] assumed that χ = 1.0. While in the case where shear-sliding is determined to be the only failure mechanisms, Aydan et al. ([30]; Aydan et al. [31] and Amini et al., [32] assumed that χ = 0.5. Zheng et al. [33] recommends the use of back analysis to determine χ where side forces could be acting on the bordering blocks to improve the accuracy of (χ) on the physical model. Once the χ is determined through back analysis, the application point resolved using Goodman and Shi [29] is recalculated. Determinations of the applications point of the nth and (n + 1) th blocks is an iterative process and highly dependent on the position on the slope model on which the force is being applied. The application point Ln is a function of the failure mode and could be resolved using analytical equations presented by Goodman and Shi [29].
In this article, the use of intelligent algorithm was applied by using the user-defined FISH function in 3DEC program, ITASCA [34] (could not share the FISH function in 3DEC program due to limitations in rights to share) to determine χ where side forces could be acting on the bordering blocks to improve the accuracy of (χ) on the physical model. To determine the value of this parameter for the example, back-analysis was performed using the discrete element code -3DEC (Itasca [34] based on the parameters given in Table 2. A user-defined FISH function (i.e. c-result) was written to obtain the magnitude and location of the normal force of contacts between adjacent blocks, based on the point where the side total forces acting could be determined. Table 3 provides the obtained magnitude and location of normal forces acting on the contacts between adjacent rock columns (blocks) above the weak plane. The magnitude and location of the normal force of contacts between adjacent block columns considered were considered as boundaries defining the failure mechanisms. These boundary blocks are between rock columns 5 and 6; Rock columns 7 and 8; and rock columns 11 and 12.
Based on the user-defined FISH function, the point where total side force acts between rock columns 5 and 6, 7 and 8, as well 11 and 12 were determined respectively, as shown in Table 4. Taking the total side force between columns 5 and 6, as an example, the calculation process is illustrated below. Location of total side force of rock columns 5 and 6 can be resolved using Eq. 38.
Then, χ can be determined
.
The results of the numerical simulation indicated that this value (χ) was approximately equal to 0.92. Thus, χ was assumed to be equal to 0.92. Therefore the position of the application of force on the 5th block can be given in the general form of \( Mn = \chi .hn \) while Ln is a function of the failure mode in this case sliding. The position of application of the force on the 6th block can be resolved using Eq. 39.
where, \( hn \) is dependent on the point of applications on the slope model and could be obtained using ordinary methods presented in Eqs. (8, 10 and 12) respectively. Now that the value of \( \chi = 0.92 \) and \( hn = 26 \) therefore \( Mn = 0.92*26 \approx 24 \) for the 6th column as shown in Table 4. Determinations of the applications point \( Mn \) of the nth and (n + 1) th blocks is an iterative process and highly dependent on the position on the slope model on which the force is being applied. The application point Ln is a function of the failure mode and could be resolved using the ordinary equations Eqs. (9; 11 and 13).The jointed rock slope subjected to slide head toppling is assumed to be acting under no noticeable external forces (earthquake, groundwater)acting on the slope and that the friction angles are \( \phi p = \phi d = \phi c = 30^\circ \). Considering that the blocks (14, 13 and 12) are short and that the height to width ratio is below 1.0 and their center of gravity lies within their bases, the three blocks are regarded as being stable. For blocks between 6 and 11, the height to width ratio is above 1.0 and the blocks topples. In that case the force required for toppling of block 11, is assumed to be \( P11 = 0 \) while \( P10 \) to \( P6 \) are computed using Eqs. 18 respectively. For blocks between 5 and 1,the weak plane bounding the potential failure blocks is counter-tilted, therefore the height to width ratio is reduced and the blocks are receiving force from toppling blocks from the upper and intermediate sections. These blocks will undergo sliding failure mechanisms. The normal and shear forces are computed using Eqs. 16 and 17 respectively and results are presented in Table 4.
The forces \( Pn,t \) required to prevent toppling of block n are computed using Eqs. 18 while forces \( Pn,s \) to require to prevent sliding of block n under limit equilibrium condition is computed using Eq. 28.
There were three scenarios that were considered for the computations of the distributions of the normal and shear forces presented. These include; a) The geometric model parameters and the slope was assumed to be dry and unsupported; b) The geomaterials parameters and the slope is is assumed to be wet and unsupported and; c) The geomaterials parameters and the slope is wet and supported (Table 5).
Parametric analyses
Once the distribution of forces has been well define in the potential failure regions, the distributions of the normal and shear forces on the bases of the blocks are computed using Eqs. 16 and 17 respectively. The influence of external forces such as groundwater and stabilization effects on the lowermost block on the distributions of forces were considered in the parametric analyses. The distributions of the normal and shear forces on the bases of the blocks considering a) no any other external forces; b) Influence of groundwater and c; stabilization from the lowermost blocks are shown in Figs. 9, 10 and 11.
Results and discussions
In a case where it is assumed that there are no external forces acting on the jointed rock slope subjected slide head toppling, the resulting distributions of normal and shear forces are high shown in Fig. 9 compared to the cases (Figs. 10 and 11)where it assumed that there are some external forces are acting on the jointed rock slope subjected slide head toppling. The highest Distribution of normal (R) and shear (S) forces on the bases of blocks without any external influence under limit equilibrium methods are 4600 kN on rock column 8 and 4200 kN on rock column 2 respectively. The Normal forces are above the shear forces throughout the slope. Since the normal forces are not equal to the shear forces on the blocks near the toe of the slope, entails unstable slope.

Distribution of normal (R) and shear (S) forces on the bases of blocks without any external influence under limit equilibrium methods

Distribution of normal (R) and shear (S) forces on the bases of blocks under the influence of groundwater

Distribution of normal (R) and shear (S) forces on the bases of blocks under the influence of groundwater and stabilization from the toe of the slope
There may be environmental settings where there are external forces acting on the slope and there is need to examine their effect on slope stability. In this article we examined external forces that include groundwater forces acting on the sides and bases of the blocks. Another external force that has been considered in this article are rock anchors that are secured in stable ground beneath the toppling mass and then tensioned against the face.
A feature of the proposed limit equilibrium analysis is that any number of external forces can be added to the analysis, provided that their magnitude, direction and point of application are known. Considering Fig. 5a-c which shows a portion of a toppling slope in which there is a sloping water table. The forces acting on block n include the force Q inclined at an angle below the horizontal, and three water forces V1, V2 and V3, as well as the forces Pn and Pn − 1 produced by the blocks above and below. Assuming that the blocks are in a state of limiting equilibrium, the force just sufficient to prevent sliding/toppling of block n hare resolved. The detrimental effects of the presence of groundwater in the jointed rock on the distributions of forces were investigated. It is evident (see Fig. 10) that the presence of groundwater diminishes the distributions of the normal and shear forces on the bases of the blocks. The highest Distribution of normal (R) and shear (S) forces on the bases of blocks with groundwater as external influence under limit equilibrium methods are 2000 kN on rock column 2 and 21000 kN on rock column 2 respectively. Figure 10 indicates that the presence of groundwater along joints widens the distribution gap between the normal and shear forces thereby increasing the forces that increase the potential failure of the block. It is highly thought that the presence of Water pressure from existence of groundwater pressure in tension cracks or similar near vertical fissures reduces stability of the slope by diminishing the shear strength of potential failure surfaces as shown in Fig. 10 above. Water pressure in tension cracks or similar near vertical fissures reduces stability by increasing the forces that induce sliding.
In the case where there are changes in groundwater levels of some rock formation, particularly shales, can cause accelerated weathering and a decrease in shear strength would lead in slope instability.
In examining rock or soil slopes, it may be a mistake to assume that ground water is not present if no seepage appears on the slope face. The seepage rate may be lower than the evaporation rate, and hence the slope surface may appear dry and yet there may be water at significant pressure within the rock mass. It is water pressure, and not rate of flow, which is responsible for instability in slopes and it is essential that measurement or calculation of this water pressure forms part of site investigations for stability studies.
Another parametric study involved studying the influence of stabilizing the lowermost block of the jointed rock slope subjected to slide head toppling. Stabilization of the lowermost blocks provide a resisting forces between joints. It lowers the distribution gap between the normal and shear forces thereby increasing the cohesion forces that reduces the potential failure of the block. The distribution of normal and shear forces on the bases of blocks are nearly the same as shown in Fig. 11. This would provide the forces necessary to overcome the frictional resistance at the block bases thereby stabilizing the slope.
Concluding remarks
The analytical solutions that incorporates the kinematic mechanisms of the jointed rock slope with counter-tilted discontinuity subjected to slide head toppling are derived based on the limit equilibrium. Then, the parametric studies were conducted to investigate the potential effects of the groundwater and stabilizing influence on the distribution of the normal and shear forces of the jointed rock slopes subjected to slide head toppling failure mode. The influence of groundwater and stabilizations from the lowermost blocks of the slope which have been overlooked in the available literature. These have since been studied and incorporated in this article. The study results indicates that groundwater lowers distributions of the normal and shear forces thereby inducing slope failure of the jointed rock slope subjected to slide- head toppling. Stabilization from the lowermost block of the slope, reduces the gap between the normal and shear forces thereby enhancing the stability of the slope.
Lastly, a slide head toppling case at Nchanga Zambia was investigated in order to illustrate the validity and effectiveness of these presented analytical solutions. The study results depict that the presented analytical solutions can provide an accurate and efficient way for stability analyses of the jointed rock slope subjected to slide head toppling failure mechanisms considering groundwater and stabilization effects.
References
Wyllie DC, Mah CW (2004) Rock Slope Engineering in Civil and Mining. Taylor and Francis, London
Shukla SK, Khandelwa S, Verma VN, Sivakugan N (2009) Effects of Surcharge on the stability of anchored rock slope with water filled tension crack under seismic loading. Geol Geotechnical J 7(4):529–538
Tang H, Young R, Eldin EZ, MAM. (2016) Stability analysis of stratified rock slopes with spatially variable strength parameters: the case of Qianjiangping landslide.Bulletin of engineering Geology and the Environment
Zuo BC, Chen CX, Liu T, Xia K, Liu X (2005) Modeling experimental study on failure mechanism of counter-tilt rock slope. Chin J Rock Mech Eng 34(1):3505–3511
Tatone BSA, Grasselli G (2010) ROCKTOPPLE: A Spreadsheet-Based Program for Probabilistic Block-Toppling Analysis. Computers and Geosciences
Babiker AFA, Smith CC, Gilbert M, Ashby JP (2014) Non-associative limit analysis of the toppling-sliding failure of rock slopes. Int J Rock Mechanics Min Sci 71:1–11
Yang BJ, He J, Ji G, Zhao TH (2014) Stability analysis of sliding toppling complex failure of rock slope (In Chinese). Rock Soil Mechanics 35(8):2335–2341
Alejano LR (2018) Complex Rock Slope Failure Mechanisms involving Toppling. XIV International Conference about slope stability (2018) April, 10-13. Seville, Spain
Liu G, Li J, Kang F (2019) Failure Mechanisms of Toppling Rock Slopes Using a Three Dimensional Discontinuous Deformation Analysis Method. Rock Mech. Rock Eng. pp. 1-24
Amini M, Majdi A (2011) Analysis of geo-structural defects in flexural toppling failure. Int J Rock Mechanics Mining Sci 48(5):175–186
Cai JS (2013) Mechanism research of toppling deformation for homogeneous equal thickness anti-dip layered rock slopes. China University Geosci, Beijing
Bowa VM, Xia YY (2019) Modified analytical technique for block toppling failure of rock slopes with counter-tilted failure surface. Indian Geotechnical J 48(4):713–727
Alejano LR, Gómez-Márquez I, MartínezAlegría R (2010) Analysis of a complex toppling-circular slope failure. Eng Geol 114(1):93–104
Amini M, Majdi A, Veshadi MA (2012) Stability analysis of rock slopes against block-flexure toppling failure. Rock Mech Rock Eng 45(4):519–532
Mohtarami E, Jafari A, Amini M (2014) Stability analysis of slopes against combined circular toppling failure. Int J Rock Mech Min Sci 67(1):43–56
Amini M, Gholamzadeh M, Khosravi MH (2015) Physical and theoretical modeling of rock slopes against block–flexure toppling failure. Int J Mining Geol Engin 49(2):155–171
Amini M, Ardestani A, Khosravi MH (2017) Stability analysis of slide-toe-toppling failure. Eng Geol 228(1):82–96
Evans RS (1981) An analysis of secondary toppling rock failures the stress redistribution method. Q J Eng Geol Hydrogeol 14(2):77–86
Nichol SL, Hungr O, Evans SG (2002) Large-scale brittle and ductile toppling of rock slopes. Can Geotech. J 39(4):773–788
Gu D, Huang D (2016) A complex rock topple-rock slide failure of an anaclinal rock slope in the wu gorge, yangtze river. China Engin Geol 208(1):165–180
Alejano LR, Carranza-Torres C, Giani GP, Arzúa J (2015) Study of the stability against toppling of rock blocks with rounded edges based on analytical and experimental approaches. Eng Geol 195(1):172–184
Amini M, Ardestani A (2019) Stability analysis of the north-eastern slope of Daralou copper open pit mine against a secondary toppling failure. Eng Geol 249(1):89–101
Wyllie DC (1980) Toppling rock slope failure examples of analysis and stabilization. J Rock Mechanics 13(2):89–98
Gao LT, Yan EC, Xie LF (2015) Improved Goodman-Bray Method in Consideration of Groundwater Effect. J Yangtze River Sci Res Inst 32(2):78
Bowa VM, Xia Y (2018) Stability Analyses of Jointed Rock Slopes with Counter-titled Failure Surface subjected to Block Toppling Failure Mechanisms. Arabian J Sci Res Article Civil Engin 43(10):5315–5331
Pritchard MA, Savigny KW (1990) Numerical modeling of toppling. Can Geotech J 27:823–834
Pritchard MA, Savigny KW (1991) The Heather Hill landslide: an example of a large scale toppling failure in a natural slope. Can Geotech J 28(1):410–422
Adhikary DP, Dyskin AV, Jewell RJ, Stewart DP (1997) A study of the mechanism of flexural-toppling failure of rock slopes. Rock Mech Rock Eng 30(1):75–93
Goodman RE, Shi GH (1985) Block theory and its application to rock engineering. Prentice-Hall Englewood Cliffs, NJ 26(1):1–3
Goodman RE, Bray JW (1976) Toppling of ROCK SLOPES. ASCE Specialty Conference on Rock Engineering for Foundations and Slopes 2(1):201–234
Aydan Ö, Kyoya T, Ichikawa Y, Kawamoto, T (1988) Flexural toppling failures in slopes and underground openings. In: Proc., 9th West Japan Symposium on Rock Engineering, Kumamoto, Pp. 72-80
Aydan O, Shimizu Y, Ichikawa Y (1989) The Effective Failure Modes and Stability of Slopes in Rock Mass with two Discontinuity Sets. Rock Mech Rock Eng 22(1):163–188
Amini M, Majdi A, Veshadi MA (2012) Stability analyses of rock slopes against block-flexure toppling failure. Int J Rock Mechanics Rock Engineering 45(4):519–532
Zheng Y, Chen C, Liu T, Xia K, Liu X (2017) Stability analysis of rock slopes against sliding or flexural-toppling failure. Bull Eng Geol Env 30(1):1–21
Itasca (2008) Three dimensional discrete element codes, ITASCA consulting group Inc., Minneapolis. User’s Guide VERSION 4.1. Itasca Consulting Group, Minneapolis
Acknowledgements
The financial support provided by the National Natural Science Foundation of China (Grant No. 41977242 and Grant No. 41702294) and Fundamental Research Fund for the central Universities, China University of Geosciences (Wuhan)Grant NO. CUGCJ1701, CUGGC09 are duly acknowledged. The anonymous reviewers are thanked in advance, for their valuable comments and effort in the process of reviewing this article.
Author information
Authors and Affiliations
Contributions
VMB collected literature data and drafted the manuscript. WG developed the analytical model. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1- Limiting Equilibrium for Toppling of the nth Block
T`a of \( Pn \), we set the moment about the pivot point 0 to zero (refer Fig. 4.) Generally, we assume that the interfaces’ friction angle of the rock columns denoted (\( \phi d \)) is equal to the friction angle on the bases (\( \phi p,\phi c \)), thus \( \phi d = \phi p = \phi c = \phi \).Therefore, before counter-tilting of the weak plane along base plane \( \psi p \) with respect to the hozontal, we have
This can be rewritten as;
Therefore, we get the following equation for \( Pn \)
Appendix 1- Limiting Equilibrium for Sliding of the nth Block
To determine the magnitude of \( Pn \) due to counter-tilting of the weak plane along base plane \( \psi c \) with respect to the hozontal, we set the moment about the pivot point 0 to zero. We have;
This can be rewritten as;
Therefore, we get the following equation for \( Pn,t \) due to counter-tilting of the weak plane
Appendix 2- Limiting Equilibrium for Sliding of the nth Block
To determine the magnitude of Pns, we set the sum of the forces in both the horizontal and vertical directions to zero (taking the horizontal axis to be along the base plane, at the angles \( \psi p \) or \( \psi c \) with respect to horizontal refer Fig. 4 c in the manuscript.
Generally, we assume that the interfaces’ friction angle of the rock columns denoted (\( \phi d \)) is equal to the friction angle on the bases (\( \phi p,\phi c \)), thus \( \phi d = \phi p = \phi c = \phi \).Therefore, before counter-tilting of the weak plane along base plane \( \psi p \) with respect to the hozontal, we have.
where \( Sn \) is the shear force along the Column-base contact. From the Mohr–Coulomb criterion, we have
where; \( \tau n \) Shear stress along the column-base contact\( \sigma n \) Normal stress at the column-base contact.
Thereafter we assumed cohesion (c) is equal to zero and divide both sides of the equation by the column-base contact area denoted by A. Thus, we get
where; \( Rn \) normal force across the column-base contacts (\( Wn\cos \psi p \)).
By solving the Fy equation for \( Rn \) and substituting into the Fx equation before counter-tilting of the weak plane along base plane \( \psi p \) with respect to the hozontal, we have,
This leads;
Therefore, we get the following equation for \( Pn,s \)
However, after counter-tilting of the weak plane along base plane \( \psi c \) with respect to the hozontal, we have.
By solving the Fy equation for \( Rn \) and substituting into the Fx equation after counter-tilting of the weak plane along base plane \( \psi c \) with respect to the hozontal, we have,
This leads;
.
Therefore, we get the following equation for \( Pns \).
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Bowa, V.M., Gong, W. Analytical technique for stability analyses of the rock slope subjected to slide head toppling failure mechanisms considering groundwater and stabilization effects. Geo-Engineering 12, 4 (2021). https://doi.org/10.1186/s40703-020-00133-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40703-020-00133-0