
Abstract
The formulation and method for solving the contact problem of the rigid cylinder sliding over the wavy surface of the viscoelastic layer bonded to the rigid base is presented under the assumption that the cylinder axis is perpendicular to the surface waviness cross-section. The calculation results allow assessing the effects of sliding velocity, surface layer microgeometry, and its relaxation properties on the contact characteristics (the position and size of the actual contact region and the contact pressure distribution) and on the friction force’s deformation component. Depending on the sliding velocity, the contact region may be solid or consisting of discrete contact spots with high values of the maximum contact pressure for the same surface waviness. It is also established that the friction force increases with increasing waviness amplitude and viscosity of the surface layer.
Similar content being viewed by others


INTRODUCTION
Elastomeric coatings deposited on surfaces allow reducing friction and wear of tribocoupling elements. In contact interaction of elastomers, the elastic hysteresis is one of the main energy dissipation sources. To describe this process, the models of viscoelastic bodies are used [1]. Another factor influencing the friction force and wear of tribocouplings is the contacting surface microgeometry. The microgeometry determines the frequency of material interaction and the time of its appearance in contact with the counterbody. Monograph [2] focuses on the physical, technological, and operational mechanisms of the generation of surface microgeometry. It is important to note that both factors (mechanical characteristics of interacting body surface layers and existence of a certain surface relief) also determine the energy consumption at locomotion of living creatures [3].
The study of the joint action of these factors is important for the development of the friction force control methods in the contact of bodies with nonideal elasticity of surface layers. The contact problems regarding the rigid indenter sliding over the viscoelastic base, whose contact surface is described by a periodic function, were considered in works [4, 5] in the plane quasistatic formulation and in works [6–10] in the spatial formulation. Analysis of the modeling results showed that the surface microgeometry parameters of the rigid indenter and nonideal elasticity of the surface layer have a decisive effect on the contact stress distribution at relative sliding of bodies; the stress state varies as the sliding velocity changes.
The work is aimed at constructing a mathematical model for the following: friction interaction of a wavy surface of elastomeric coating with a cylindrical stamp sliding over it under boundary friction conditions; as well as analysis of the joint action of the coating mechanical characteristics (modulus of elasticity and times of relaxation and creep) and parameters of its surface microgeometry on the contact pressure distribution, actual contact areas, and friction force at different indenter sliding velocities.
FORMULATION OF THE PROBLEM
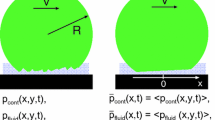
Let us consider the cylindrical stamp sliding over the viscoelastic layer, lying on the rigid base, with the constant velocity \(V\) in the direction of the \(Ox\) axis. The shape of the stamp contacting surface in the moving coordinate system related to the cylinder is described by the function \(z = f(x)\) (Fig. 1). Due to smallness of deformations, we take \(f(x) = \frac{{{{x}^{2}}}}{{2R}}\), where \(R\) is the cylinder radius. The problem is solved in the quasistatic formulation. We assume that the stamp is subject to the constant distributed force \({P \mathord{\left/ {\vphantom {P R}} \right. \kern-0em} R}\) directed oppositely to the \(Oz\) axis.

Contact scheme.
The viscoelastic base is a layer with the thickness \(H\) whose surface has a wavy relief described by the periodic function \(\varphi (y)\) with the period \(l\) and amplitude \(h\), and \(h \ll H\).
To describe the behavior of the viscoelastic layer under pressure, we use the Kelvin model [1] with the constrained creep. In this model, in the moving coordinate system \(Oxyz\), the elastic displacements of the layer \(u(x,y)\) in the direction opposite to the \(Oz\) axis are associated with the normal contact pressure \(p(x,y)\) by the relation [4]
Here, \({{T}_{\varepsilon }}\) and \({{T}_{\sigma }}\) are the times of creep and relaxation, and \(E\) is the long-termed modulus of the base material’s elasticity.
The contact condition between the stamp and base inside the region \(\omega \) has the form
where
Here, \(D\) is the penetration of the stamp into the viscoelastic layer.
Dependent on the given interaction conditions (load, sliding velocity), the contact region \(\omega \) may be simply-connected and multiply-connected, consisting of closed subregions \({{\omega }_{i}}\) periodically placed along the \(Oy\) axis. By \( - a(y)\) and \(b(y)\), we denote the left and right end of the contact region \(\omega \) in the plane \(xOy\). Due to periodicity of the functions \(a(y)\) and \(b(y)\), we consider them at a single period. At the right boundary \(b(y)\) of the contact region (the place where the cylinder surface enters the contact with the viscoelastic base), the boundary displacements satisfy the condition
In addition, at the entire contact region boundary, the contact pressures are equal to zero due to smoothness of the shape of contacting bodies, that is,
Due to the cylinder radius \(R \gg l\), where \(l\) is the surface waviness period, the ratio \(k = {R \mathord{\left/ {\vphantom {R l}} \right. \kern-0em} l}\) can be assumed as an integer number. In this case, the equilibrium condition and the expression for the moment \(M\) of resistance against the cylinder sliding over the viscoelastic layer have the form
Relations (1)–(6) form the full system of equations for determining the contact pressure distribution and analyzing the friction forces appearing at cylinder sliding.
SOLUTION METHOD
We solve the problem in the dimensionless form and therefore introduce the following dimensionless quantities and parameters:
In these coordinates, Eq. (1) becomes (from now on, a bar is omitted)
We consider this equation on the segment \(y \in \left[ {0,1} \right]\) with \(k\) periods of relief waviness. The function \(u(x,y)\) at the right boundary \(b(y)\) of the contact region fulfills condition (4), that is,
and the sought function \(p(x,y)\) satisfies conditions (5), which in the dimensionless form become
For any fixed \(y \in \left[ {0,1} \right]\) for the given function \(u(x,y)\), satisfying (9), with the initial condition contained in (10)
the solution \(p(x,y)\) to differential Eq. (8) is the function
Using the integration by parts, this formula may be rewritten as
or
The right boundary \(b(y)\) of the contact area \([ - a(y),b(y)]\) is determined from (9) and its left boundary \( - a(y)\) is determined from the condition following from (10) and (11)
Expressions (12) and (13) together with conditions (9) and (14) fully determine the distribution of contact pressures at a given dimensional function \(u(x,y)\) introduced in (2) (or its dimensionless analogue determined by formulas (7)) which prescribes the deformed surface shape in the contact region.
The dimensionless distributed force P and moment \(M\) acting on the segment \(y \in \left[ {0,1} \right]\) are computed by the formulas
where \(\Omega \equiv \left\{ {(x,y){\text{:}} - {\kern 1pt} a(y) \leqslant x \leqslant b(y),y \in \left[ {0,1} \right]} \right\}\) is the contact region between the cylinder and deformed surface of the wavy base for \(y \in \left[ {0,1} \right]\) and \({{\Omega }_{l}} \equiv \left\{ {(x,y){\text{:}} - {\kern 1pt} a(y) \leqslant x \leqslant b(y),y \in \left[ {0,{1 \mathord{\left/ {\vphantom {1 k}} \right. \kern-0em} k}} \right]} \right\}\) is the contact region on the period, that is, for \(y \in \left[ {0,{1 \mathord{\left/ {\vphantom {1 k}} \right. \kern-0em} k}} \right]\).
Using (8), (9), and (11), the inner integrals in relations (15) may be expressed through the shape \(u(x,y)\) of the deformed surface in the contact region
COMPUTATION OF CONTACT CHARATERISTICS
Let us consider the sliding of a straight circular cylinder with the radius \(R\) whose profile is approximated by the parabola \(\left( {f(x) = \frac{{{{x}^{2}}}}{{2R}}} \right)\) over the viscoelastic wavy base. Then, expression (2) for the dimensionless function \(u(x,y)\) (7) with account for (9) takes the form
where
Here, the dimensionless function \(\Delta (y)\) may be computed by the formula (see (3) and (7))
where \(D\) is the dimensionless penetration of the cylinder into the deformed half-plane (counting from the upper edge) and \(\varphi (y)\) is the periodic function describing the surface relief. Here, assuming that the value of the function computed by formula (19) is negative, \(\Delta (y) < 0\), then for this \(y\), the cylinder and the deformed surface do not contact. Note that the function \(u(x,y)\) (17) at condition (18) satisfies condition (9).
For the function \(u(x,y)\) (17), the sought contact pressure \(p(x,y)\), as follows from (11), (12), or (13), is computed by the formula
and we obtain the following expressions for computing the inner integrals (16) with account for the form of function \(u(x,y)\) (17)
which allows computing dimensionless distributed force \(P\) and moment \(M\) by formulas (15).
In expressions (20) and (21), the right boundary of the contact region \(\left[ { - a(y),b(y)} \right]\) is determined by relation (18), and, as follows from (10), (14), and (20), the left boundary is a solution to the transcendental equation
This equation has a unique solution; at any fixed \(y\), we consider the function entering the left-hand side of Eq. (22)
for the argument values \(a \in \left[ { - b, + \infty } \right)\). It is clear that the value \({{\left. {f(a)} \right|}_{{a = - b}}} = 0\), the limit \(\mathop {\lim }\limits_{a \to + \infty } f(a) = - \infty \), and its derivative
at \(a = - b\) is equal to \({{\left. {f{\kern 1pt} '(a)} \right|}_{{a = - b}}} = \alpha b > 0\) and \(\mathop {\lim }\limits_{a \to + \infty } f{\kern 1pt} '(a) = - \infty \). Because the second derivative
it means that the function \(f{\kern 1pt} '(a)\) has the unique root \({{a}_{0}} \in ( - b, + \infty )\) and the function \(f(a)\) has the unique root \(\tilde {a} \in ({{a}_{0}}, + \infty )\). Since
(these equations are valid, because \({{e}^{{\alpha \zeta b}}} > 1 + \alpha \zeta b\), thus, the expressions in square brackets are positive), \({{a}_{0}} \in ( - b,0)\) and \(\tilde {a} \in (0, + \infty )\).
ANALYSIS OF CALCULATION RESULTS
Relations (9), (14), (15), (20), and (21) were used for computing the contact pressure distribution and integral interaction characteristics (moment and value of cylinder penetration into the viscoelastic base) at the given distributed force applied to the cylinder and at its given sliding velocity over the viscoelastic base. Here, we considered that the periodic function describing the surface relief has the form
Analysis of the obtained relations for contact pressures, distributed force, and moment shows that the studied characteristics of contact interaction depend on six dimensionless parameters: \(\alpha \), \(H\), \(P\), \(\zeta \), \(k\), and \(h\) (7). In computations, we fixed the values of the relative thickness of the viscoelastic layer (\(H = 100\)) and dimensionless distributed force acting on the cylinder (\(P = 0.001\)).
In Fig. 2, we show the graphs of the contact pressures distributions in the sections passing through the cylinder axis in parallel (\(x = 0\)) and perpendicularly to its generatrix (\(y = 0\) and \(y = {l \mathord{\left/ {\vphantom {l 2}} \right. \kern-0em} 2}\)) for different values of the parameter \(\zeta \), which is in inverse proportion to the cylinder sliding velocity. The computations were carried out for the given relief of the base surface (\(k = 10\) and \({h \mathord{\left/ {\vphantom {h l}} \right. \kern-0em} l} = 1\)) and \(\alpha = 5\).

Distribution of contact pressures in sections (a) x = 0, (b) y = 0, and (c) y = l/2 at k = 10, h/l = 1, α = 5, and the following values of parameter ζ: ζ = 10–4 (curves 1), ζ = 10–0.5 (curves 2), ζ = 100.2 (curves 3), and ζ = 104 (curves 4).
As the cylinder velocity of sliding over the wavy viscoelastic base increases (which corresponds to the decrease in the parameter \(\zeta \)), calculations show that the maximum contact pressures increase and the contact becomes not full. The pressure distribution in the sections \(y = {\text{const}}\) is nonsymmetric, and the largest asymmetry of contact pressures and the largest displacement of the contact region in the cylinder sliding direction are observed at the values of \(\zeta \) close to 1 for the chosen geometry of the wavy layer.
The contact region between the cylinder with the considered wavy base may be both continuous and consisting of discrete spots. In particular, at \(\zeta = {{10}^{{ - 4}}}\), the results presented in Fig. 2 show that the contact region is not connected. The configuration and the size of the contact region are considerably influenced by all parameters of the problem determined both by the mechanical and geometric characteristics of the base and by the sliding velocity. In Fig. 3, we present the contact regions appearing during the variation of the parameter \(\zeta \) characterizing the cylinder sliding velocity (Fig. 3a) and the parameter \({h \mathord{\left/ {\vphantom {h l}} \right. \kern-0em} l}\) characterizing the amplitude of the relief waviness (Fig. 3b).

Configuration of contact region at α = 5 and k = 10; (a) h/l = 1 and ζ = 10–4 (curve 1), ζ = 10–0.5 (curve 2), ζ = 100.2 (curve 3), and ζ = 104 (curve 4) and (b) ζ = 10–0.5 and h/l = 1 (curve 1), h/l = 0,6 (curve 2), h/l = 0.3 (curve 3), and h/l = 0 (curve 4).
As the parameter \(\zeta \) increases (the sliding velocity decreases), the discrete contact transits to the continuous contact, when the contact region in the direction of the \(Oy\) axis is limited by the wavy lines. The contact region is nonsymmetric and shifted towards the cylinder sliding (along the \(Ox\) axis). As the amplitude of base waviness (parameter \({h \mathord{\left/ {\vphantom {h l}} \right. \kern-0em} l}\)) increases, the oscillations of the contact region width along the \(Oy\) axis increase. For the base with flat surface, the contact region is a band of constant width shifted along the \(Ox\) axis (curves 4 in Fig. 3b).
In Fig. 4, the calculation results of the integral interaction characteristics are plotted: the resistance moment \({M \mathord{\left/ {\vphantom {M P}} \right. \kern-0em} P}\) and the penetration \(D\) of the cylinder computed for different characteristics of the base surface relief.

(a) Resistance moment and (b) cylinder penetration over parameter ζ at α = 5, h/l = 1, and different values of parameter k: k = 1 (curve 1), k = 2 (curve 2), k = 5 (curve 3), and k = 100 (curve 4).
The calculation results show (Fig. 4a) that the friction moment of the cylinder sliding over the relief base is a nonmonotonic function of the sliding velocity, as well as show that the maximum value of the moment increases and shifts towards the higher velocities (lower values of \(\zeta \)) at decreasing parameter \(k\) (7). It is important to note that the parameter \(k = {R \mathord{\left/ {\vphantom {R l}} \right. \kern-0em} l}\) characterizes the scale of roughness compared to the cylinder radius: as this parameter increases, there are more asperities of the wavy base surface in the length equal to the cylinder radius. The dependence of the cylinder penetration into the viscoelastic base on the parameter \(\zeta \) has three characteristic segments: for small (\(\zeta < {{10}^{{ - 1}}}\)) and large (\(\zeta > 10\)) values of this parameter, the penetration value is practically constant; for intermediate values, the penetration grows with an increase in \(\zeta \). In the same variation range in the penetration value, the moment of resistance against cylinder sliding is significantly separated from zero. As the parameter \(k\) decreases, the cylinder penetration into the wavy viscoelastic base and the moment of resistance against sliding increase.
The calculation results presented in Fig. 5 allow analyzing the joint impact of the layer viscosity and parameters of its roughness on the value of the moment of resistance against the cylinder sliding. In particular, at the given layer viscosity and period of its waviness, results show that the growth in the amplitude of asperities leads to the increase in the resistance moment (see Fig. 5a). The growth in the base viscosity increases the resistance moment against the cylinder sliding (Fig. 5b). The computations also establish that the dependence of the resistance moment on the viscosity is close to exponential even at small relative heights of asperities (for the values of parameter \({h \mathord{\left/ {\vphantom {h l}} \right. \kern-0em} l} < 0.5\)). For more viscous materials (Fig. 5b, curves 1–3), the increase in the relative height of asperities leads to a considerable growth in the resistance moment against the cylinder sliding.

Resistance moment over parameter h/l at α = 5, ζ = 10–0.5, P = 0.001, (a) different values of parameter R/l: R/l = 1 (curve 1), R/l = 2 (curve 2), R/l = 10 (curve 3), and R/l = 1000 (curve 4), and (b) different values of parameter α: α = 100 (curve 1), α = 50 (curve 2), α = 20 (curve 3), α = 10 (curve 4), α = 5 (curve 5), and α = 2 (curve 6).
CONCLUSIONS
An analytical solution of the contact problem about the cylinder sliding over the wavy viscoelastic base was constructed under the assumption that the plane of wave section is perpendicular to the cylinder generatrix. We established that the contact characteristics depend on six dimensionless parameters determined by the viscoelastic and geometric characteristics of the layer and by the loading and velocity parameters of the cylinder motion.
We investigated the joint effect of the mechanical characteristics of the base and parameters of its microgeometry (length and height of wave) together with the sliding velocity on the distribution of contact pressures and on the value of friction force. We established that the contact region may be both continuous and consisting of periodically-positioned closed subregions that shifted relative to the cylinder axis in the direction of its motion. The size and configuration of the contact region and its shift for a given value of the distributed force applied to the cylinder of a fixed radius are determined by the layer microgeometry parameters and the cylinder’s sliding velocity. As the sliding velocity increases, the contact area decreases, and maximum values of contact pressures grow. Furthermore, the resistance force dependence on the velocity is nonmonotonic.
We analyzed the effects of the layer surface microgeometry and parameter characterizing its viscosity on the value of the friction force at arbitrary-fixed sliding velocity. The calculation results may be used for controlling the resistance moment value against the sliding of bodies over the viscoelastic base by choosing the parameters of its microgeometry for given loading and velocity characteristics of motion and mechanical characteristics of the base.
DENOTATIONS
\(V\) is the cylinder sliding velocity
\(R\) is the cylinder radius
\(P\) and \(M\) are the load and the moment of resistance acting on a cylinder part with the length \(R\)
\(f(x)\) is the shape of contacting surface of the cylinder
\(H\) is the thickness of the viscoelastic layer
\(\varphi (y)\) is the shape of the layer’s wavy surface
\(l\) is the period of the layer’s wavy surface
\(h\) is the amplitude of the layer’s wavy surface
\(u(x,y)\) are the elastic displacements
\(p(x,y)\) are the contact pressures
\({{T}_{\varepsilon }}\) and \({{T}_{\sigma }}\) are the time of creep and relaxation
\(E\) is the long-termed modulus of elasticity of the layer material
\(\omega \) is the contact region
\(D\) is the cylinder penetration into the viscoelastic layer
\( - a(y)\) and \(b(y)\) are the left and right ends of the contact region \(\omega \) in the plane \(xOy\)
REFERENCES
Rabotnov, Yu.N., Elementy nasledstvennoi mekhaniki tverdykh tel (Elements of Hereditary Mechanics of Solid Bodies), Moscow: Nauka, 1977.
Grigor’ev, A.Ya., Fizika i mikrogeometriya tekhnicheskikh poverkhnostei (Physics and Microgeometry of Technical Surfaces), Minsk: Belaruskaya Navuka, 2016.
Filippov, A.E. and Gorb, S.N., Modeling of the frictional behavior of the snake skin covered by anisotropic surface nanostructures, Sci. Rep., 2016, vol. 6, art. ID 23 539. https://doi.org/10.1038/srep23539
Goryacheva, I.G. and Makhovskaya, Yu.Yu., Effect of surface imperfect elasticity on a sliding contact of rough elastic bodies, J. Frict. Wear, 1997, vol. 18, no. 1, pp. 1–8.
Goryacheva, I.G. and Goryachev, A.P., Contact problems of the sliding of a punch with a periodic relief on a viscoelastic half-plane, J. Appl. Math. Mech., 2016, vol. 80, no. 1, pp. 73–83.
Lyubicheva, A.N., Analysis of the mutual influence of contact spots in sliding of the periodic system of asperities on a viscoelastic base of the Winkler type, J. Frict. Wear, 2008, vol. 29, no. 2, pp. 92–98.
Sheptunov, B.V., Goryacheva, I.G., and Nozdrin, M.A., Contact problem of die regular relief motion over viscoelastic base, J. Frict. Wear, 2013, vol. 34, no. 2, pp. 83–91.
Carbone, G. and Putignano, C., A novel methodology to predict sliding and rolling friction of viscoelastic materials: theory and experiments, J. Mech. Phys. Solids, 2013, vol. 61, no. 8, pp. 1822–1834.
Stepanov, F.I., Sliding of two smooth indenters on a viscoelastic foundation in the presence of friction, J. Appl. Mech. Tech. Phys., 2015, vol. 56, no. 6, pp. 1071–1077.
Goryacheva, I.G., Makhovskaya, Yu.Yu., Morozov, A.V., and Stepanov, F.I., Trenie elastomerov (Friction of Elastomers), Moscow: Inst. Komp’yut. Issled., 2017.
Funding
The work is supported by the Russian Foundation for Basic Research (project no. 20-01-00400).
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by E. Oborin
About this article

Cite this article
Goryacheva, I.G., Goryachev, A.P. Friction Characteristic Calculations during Cylinder’s Sliding Contact over the Wavy Viscoelastic Base. J. Frict. Wear 41, 502–508 (2020). https://doi.org/10.3103/S1068366620060070
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.3103/S1068366620060070