
Abstract
Vibration chains are of interest in many fields of practical applications. In this contribution, a modal analysis of the rather special Mikota’s vibration chain is performed. Herein, focus is set on the mode shapes of this multibody oscillator, which was firstly introduced by Mikota as a solid body compensator in hydraulic systems for filtering out fluid flow pulsations. The mode shapes show interesting properties, e.g. an increase in the polynomial representing the coordinates of each mode shape with an increasing eigenfrequency associated with the respective mode shape. This and other properties are discussed exemplary. Some of these properties still have to be proven, which is the task of future work. Additionally, modal damping of Mikota’s vibration chain is discussed. Moreover, an approach for determining the damping matrix for given Lehr’s damping measures without knowing the mode shapes in advance is introduced. This approach involves the determination of a matrix root.
Similar content being viewed by others


1 Introduction
In many engineering disciplines such as civil engineering or mechanical engineering, multibody oscillators and in detail vibration chains are an appropriate approach for modelling even complicated structures and to get major insights into the structures’ behaviour. Standard text books which deal with the investigation of vibration chains and other multibody oscillators are among others [3, 4, 6,7,8, 14, 15]. Typical examples of vibration chains are torsional vibration of turbines [6] or the dynamic behaviour of layered soil deposits above a bedrock [2]. Besides these apparent applications, multibody oscillators serve as examples for application of advanced methods of investigations. Such methods are—among other things—model order reduction techniques [20] or solver routines for determining eigenvalues. The main advantage of multibody oscillators is that there are configurations which give results known a priori. Consequently, the multibody oscillators serve as reference cases. One such configuration is Mikota’s vibration chain. For the first time, it was introduced in [11] as a special configuration of a solid body compensator for filtering fluid flow pulsations of hydraulic sources, see also [9, 10]. Although this solid body compensator is a rather special vibration chain, it possesses nice properties and gives interesting results when analysing its dynamic behaviour.
The outline of this contribution is as follows: In Sect. 2, the definition of a special vibration chain according to [9] is given. Additionally, this section contains the state of the art of investigations concerning Mikota’s vibration chain. Based on the findings revisited there, a discussion of the mode shapes of Mikota’s vibration chain is performed in Sect. 3. Within this section, questions are sketched which are still open and need to be answered in order to better understand the dynamic behaviour of Mikota’s vibration chain and of multibody oscillators in general. A major topic in vibrational analysis and in control engineering is the investigation of damping phenomena. Thus, in Sect. 4 the related work concerning Mikota’s vibration chain is revisited and new aspects are discussed. A new approach which allows—for given Lehr’s damping measures—the determination of the damping matrix without knowing the mode shapes in advance is introduced. The applicability of this proposed methodology is shown in Sect. 5. The conclusions are provided with Sect. 6.
2 Definition of Mikota’s vibration chain and literature review
In this contribution, a linear undamped vibration system with n degrees of freedom (DOF) is dealt with. Such a system can be described by
with \(\mathbf{x} = \left( x_1, \ldots , x_i , \ldots , x_n \right) ^\mathrm{T}\) and \(\ddot{\mathbf{x }} = \left( \ddot{x}_1, \ldots , \ddot{x}_i, \ldots , \ddot{x}_n \right) ^\mathrm{T}\) representing the column matrix of displacements and accelerations, respectively [6]. Herein, \(\tilde{\mathbf{M }}\) denote the mass matrix, while the stiffness matrix is given by \(\tilde{\mathbf{K }}\).

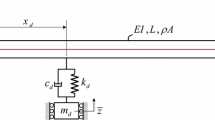
Undamped vibration chain [16]
For a linear vibration chain according to Fig. 1, these matrices are diagonal and tri-diagonal, respectively. In detail, it is [3, 6]
Mikota introduced a vibration chain with the following evolution equations for the masses and stiffnesses associated with the i-th DOF
cf. [9]. Herein, m is the first mass. As given in Eq. (2.4), the evolution of the single masses is independent of the total number n of DOF, while the stiffness coefficients are related to n in such a manner that the stiffness of the last spring always is \(k_n = k\). Using the quantities m and k, Eq. (2.1) can be rewritten as
so that \(\mathbf{M} \) and \(\mathbf{K} \) are number matrices.
Mikota conjectured that this specific vibration chain has the eigenfrequencies
where \(\varOmega = \sqrt{k/m}\) is the first eigenfrequency, [9]. As can readily be seen, enlarging the system from n DOF to \(n+1\) DOF leads to the following changes in the mass and stiffness matrices
see also [16]. Obviously, there is a counter pattern in the setup of these matrices. Due to this opposite behaviour in constructing the matrices, established methods as given in e.g. [6, 15] for analysing the eigenfrequencies, the mode shapes, and the eigenforces for arbitrary n DOF are not suitable. For a discussion of the resulting difficulties for proving Mikota’s conjecture it is referred to e.g. [12, 13]. To overcome these difficulties, two different approaches were proposed by [13, 16], each of which leads to a proof of Mikota’s conjecture. Describing the mode shapes and the eigenforces of Mikota’s vibration chain was not the scope of Mikota’s work. However, these are necessary in order to better understand the system’s dynamic behaviour. To close this gap, in [13] an approach based on binomial coefficients for determining the mode shapes is provided, while in [18] a modification of the well-known Laguerre polynomials is proposed allowing the evaluation of the mode shapes of Mikota’s vibration chain. The drawbacks of both approaches are that they (i) are quite laborious and (ii) do not reveal an easy structure in order to obtain general formulæ for the mode shapes \(\mathbf{u }_l\). Both problems are solved in [19] and some results presented therein shall be used in Sect. 3.
Meanwhile, further investigations of Mikota’s vibration chain took place. The optimal damping of Mikota’s vibration chain for the two cases of an (i) absolute damper and (ii) relative damper was exemplary addressed in [17]. For determining the optimal damping for these two cases, the criteria were used which have been presented in [4, 14]. A model order reduction in Mikota’s vibration chain based on the proper orthogonal decomposition according to [5] was performed in [20]. In the latter contribution, two cases were considered: (i) model order reduction of Mikota’s vibration chain and (ii) model order reduction of Mikota’s vibration chain with an additional absolute damping element.
3 Mode shapes of Mikota’s vibration chain and related observations
The coordinates of the eigenvectors of a matrix , i.e. the mode shapes, can be expressed by polynomials \(P_l (i)\) in the coordinate i
see [7]. Based on the proof provided with [19] the mode shapes \(\mathbf{u }_l\) of Mikota’s vibration chain for arbitrary n DOF and \(l \le n\) can be determined in a successive manner. Herein, the polynomial degree of \(P_l\) is l. In detail, the first four mode shapes of Mikota’s vibration chain are given by the following polynomials:
and
see [19]. Exemplary, for Mikota’s vibration chain with \(n=10\) DOF the eigenfrequencies \(\varOmega _l\) and the first five mode shapes are given in Fig. 2.

In general, the mode shapes \(\mathbf{u }_l\) of a dynamical system to different eigenfrequencies fulfil the relation
That means that they are not orthogonal to each other with respect to the (standard) scalar product. However, the mode shapes of Mikota’s vibration chain show the neat property that the matrix product \(\mathbf{U }^\mathrm{T} \mathbf{U }\) is tri-diagonal, see also [19], where \(\mathbf{U }\) is the modal matrix
Introducing the polynomials \(P_l (x)\) with \(P_l (i) = u_l (i)\) such that
and
etc., then \(P_l (x)\) approximates the linearly interpolated mode shape \(\mathbf{u }_l\), cf. for example Fig. 3.

Mode shape no. 4 represented by \(\mathbf{u }_{4} (i)\) and \(P_4 (x)\) for different n
It is worth noting that only the vectors \(\mathbf{u }_l\), that is, the coordinates stemming from evaluating the polynomials \(P_l (x)\) at the distinct \(x=i\), lead to the tri-diagonality. But the polynomials \(P_l\) themselves are not orthogonal in the sense of
with a certain weighting function \(q(x) > 0\). Or—in other words—the \(P_l (x)\) do not belong to a classical system of orthogonal polynomials as, e.g. the Legendre- or Laguerre polynomials.
Figure 3 contains the 4-th mode shape for \(n=4\) and \(n=8\), respectively. Herein, the representation of the mode shapes is done both by line segments and interpolation polynomials \(P_l\). If these two types of mode shape representation are compared with each other it is apparent that with increasing number of DOF, the difference between the discrete coordinates of the line segments and the corresponding polynomials tends to zero, which is indeed a trivial observation. Some additional observations shall be listed in what follows.
In [3], it has been proved that the mode shapes \(\mathbf{u }_l\) represented by line segments show l nodes and l antinodes (loops) including the behaviour at the boundaries, that is, a node at \(P_l (0) = 0\) and an antinode at \(P_l (n)\). This result has also been quoted in [6, p. 165ff]. Because each antinode is associated with at least one coordinate \(u_l (i)\), the polynomial \(P_l (x)\) possesses the same number of antinodes and therefore shows the same number l of nodes, too. That means that the polynomials \(P_l (x)\) show l real nonnegative zeros \(x_j \ge 0\) with \(j = 1, \ldots , l\) and \(P_l \left( x_j \right) = 0\) in \(0 \le x_j < n\). Additionally, the nodes of \(P_l (x)\) with \(0 \le x < n\) are separated by the nodes of \(P_{l-1} (x)\) for \(l = 3, \ldots , n\).
4 Remarks on modal damping of Mikota’s vibration chain
The adequate modelling of damping is a major issue in vibrational analysis. Only some works deal with the investigation of damping in the context of Mikota’s vibration chain. Based on [12], the influence of a single absolute damper and a single relative damper on the vibration behaviour of Mikota’s vibration chain was investigated in [17] for some n DOF. In [20], Mikota’s vibration chain with additional dampers was investigated concerning some issues of model order reduction. However, a systematic investigation is still missing, yet. Thus, some general properties shall be discussed in what follows.
The eigenvalue problem of Eq. (2.5) reads
with \(\mathbf{M} \), \(\mathbf{K} \) according to Eqs. (2.2)–(2.5) and
In the present case, for the spectral matrix
holds. Using the modal matrix as introduced with Eq. (3.7), the following relations hold
In the preceding sections, \(\mathbf{M }\) and \(\mathbf{K }\) denote number matrices. Thus, for describing modal damping, a number matrix \(\mathbf{D }\) is introduced, too:
where condition (4.7) has been given by [1].
This number matrix \(\mathbf{D }\) shall be determined in what follows. Starting point is the equation of motion describing free oscillations
Right-multiplication of \(\mathbf{u }_l\) with Eq. (4.7) yields
and consequently
where \(\mathbf{I }\) denotes the unit matrix. This can be rewritten
showing the eigenvector
with an arbitrary scaling factor \(\alpha _l\). Then,
holds. The eigenvalue problem for the damped Mikota’s vibration chain can now be formulated as follows:
As \(\mathbf{M }\mathbf{u }_l \ne \mathbf{0 }\),
The \(\alpha _l\) can be determined e.g. by setting the Lehr’s damping measure \(D_l\) to
cf. amongst others [8]. Then,
which is a twofold eigenvalue. Equations (4.13), (4.14) then read
and thus the sought damping matrix is
Considering \(\mathbf{U }^\mathrm{T} \mathbf{D }\mathbf{U }\) which is a diagonal matrix it is obvious that \(\mathbf{D }\) is a symmetric positive definite matrix. As can be directly seen, the modal matrix \(\mathbf{U }\) and thus all mode shapes \(\mathbf{u }_l\) are needed to calculate the damping matrix \(\mathbf{D }\). The question arises of how the damping matrix can be determined without knowing the mode shapes in advance. Using the relation
where Eq. (4.6) was applied, gives
Thus, the damping matrix can be determined without knowing the mode shapes by means of the following equation
However, finding the roots necessitates the eigenvalues of the matrix root to be positive. This preliminary is always fulfilled for the vibration chain dealt with here. But still the roots of matrices in general are ambiguous.
Setting
yields
and consequently
according to Eq. (4.13). For this case, the damping matrix reads as
As can readily be seen, the damping matrix in the present case is half of the damping matrix as given with Eq. (4.24). The eigenvalues of the present case are
and Lehr’s damping measure follows to
It should be noted that finding the matrix root \(\sqrt{\mathbf{M }^{-1} \mathbf{K }}\) again is the major issue for determining the damping matrix \(\mathbf{D }\) without using the mode shapes.
5 Example for \(n=3\) DOF
To show the applicability of the proposed methodology, a rather small example shall be looked at in what follows. For \(n=3\), Mikota’s vibration chain is characterized by
The mode shapes are given by Eqs. (3.2)–(3.4) and yield
Therefore, the modal matrix and its inverse are determined as
The damping matrix according to Eq. (4.28) is calculated as
The relation (4.12) is confirmed with \(\alpha _l = l\) such that
really hold. It should be noted that the most labourious work is related to the determination of \(\mathbf{U }^{-1}\).
6 Conclusions
Mikota’s vibration chain is a multibody oscillator possessing nice properties. Due to these properties, the rather special Mikota’s vibration chain can serve as reference case and application example for several techniques which allow the solution of practical problems. This special vibration chain has been investigated completely confirming the eigenfrequencies \(\varOmega _l = l \varOmega \) with the first eigenfrequency \(\varOmega = \sqrt{k/m}\) and determining the eigenvectors \(\mathbf{u }_l\) successively by a recursion formula. The mode shapes have been illustrated by means of both line segments from \(\left( i, u_l (i) \right) \) to \(\left( i+1, u_l (i+1) \right) \) and by polynomials \(P_l (x)\), where the relation \(u_l (i) = P_l (i)\) holds. Although the polynomials do not form a classical system of orthogonal polynomials, it seems that there exist similar properties. However, this conjecture has to be proven in future work.
Additionally, the structure of the damping matrix is investigated without knowing the mode shapes in advance by setting Lehr’s damping measure to certain values. However, the authors currently have to halt the investigations when the matrix root \(\sqrt{\mathbf{M }^{-1} \mathbf{K }}\) has to be evaluated. For the best knowledge of the authors, finding the roots of this expression is an open question. Thus, these investigations concerning the damping matrix have to be continued in future work, too.
References
Caughey, T.K., O’Kelly, M.E.J.: Classical normal modes in damped linear dynamic systems. ASME J. Appl. Mech. 32(3), 583–588 (1965). https://doi.org/10.1115/1.3627262
Chong, L., Juyun, Y., Haitao, Y., Yong, Y.: Mode-based equivalent multi-degree-of-freedom system for one-dimensional viscoelastic response analysis of layered soil deposit. Earthq. Eng. Eng. Vib. 17(1), 103–124 (2018)
Grammel, R.: Über schwingungsketten [on vibration chains]. Ingenieur-Archiv [now: Archive of Applied Mechanics] 14(4), 213–232 (1943)
Gürgöze, M., Müller, P.C.: Optimal positioning of dampers in multi-body systems. J. Sound Vib. 158(3), 517–530 (1992). https://doi.org/10.1016/0022-460X(92)90422-T1
Kerschen, G., Golinval, J.C., Vakakis, A.F., Bergman, L.A.: The method of proper orthogonal decomposition for dynamical characterization and order reduction of mechanical systems: An overview. Nonlinear Dyn. 41(1–3), 147–169 (2005). https://doi.org/10.1007/s11071-005-2803-2
Klotter, K.: Technische Schwingungslehre—Bd. 2.: Schwinger von mehreren Freiheitsgraden (Mehrläufige Schwinger) [Technical Oscillation Theory—Volume 2.: Oscillators with Several Degrees of Freedom], 2nd edn. Springer, Berlin (1981)
Kochendörffer, R.K.: Determinanten und Matrizen [Determinants and Matrices]. B. G. Teubner Verlagsgesellschaft, Leipzig (1963)
Magnus, K., Popp, K., Sextro, W.: Schwingungen [Oscillations], 9th edn. Springer, Wiesbaden (2013)
Mikota, J.: Frequency tuning of chain structure multibody oscillators to place the natural frequencies at \(\omega _1\) and \(n - 1\) integer multiples \(\omega _2, \ldots \omega _n\). Zeitschrift für Angewandte Mathematik und Mechanik 81(S2), 201–202 (2001)
Mikota, J.: Comparison of various designs of solid body compensators for the filtering of fluid flow pulsations in hydraulic systems. In: Proceedings of the 1st FPNI-Ph.D. Symposium, Hamburg, pp. 291–301 (2000)
Mikota, J., Scheidl, R.: Solid body compensators for the filtering of fluid flow pulsations in hydraulic systems. In: Mechatronics and Robotics’99, TU Brno (1999)
Müller, P.C., Gürgöze, M.: Natural frequencies of a multi-degree-of-freedom vibration system. Proc. Appl. Math. Mech. 6(1), 319–320 (2006). https://doi.org/10.1002/pamm.200610141
Müller, P.C., Hou, M.: On natural frequencies and eigenmodes of a linear vibration system. Zeitschrift für Angewandte Mathematik und Mechanik 87(5), 348–351 (2007). https://doi.org/10.1002/zamm.200610319
Müller, P.C., Schiehlen, W.O.: Linear Vibrations. M. Nijhoff Publishers, Dordrecht (1985)
Schwarz, H.R., Rutishauer, H., Stiefel, E.: Numerik symmetrischer Matrizen [Numerics of Symmetric Matrices]. B. G. Teubner, Stuttgart (1968)
Weber, W., Anders, B., Müller, P.C.: A proof on eigenfrequencies of a special linear vibration system. Zeitschrift für Angewandte Mathematik und Mechanik 95(5), 519–526 (2015). https://doi.org/10.1002/zamm.201300058
Weber, W., Anders, B., Zastrau, B.W.: Some damping characteristics of a chain structured vibration system. Proc. Appl. Math. Mech. 8(1), 10391–10392 (2008). https://doi.org/10.1002/pamm.200810391
Weber, W., Anders, B., Zastrau, B.W.: Calculating the right-eigenvectors of a special vibration chain by means of modified laguerre polynomials. J. Theor. Appl. Mech. Sofia 43(4), 17–28 (2013). https://doi.org/10.2478/jtam-2013-0030
Weber, W., Müller, P.C., Anders, B.: The remarkable structure of the mode shapes and eigenforces of a special multibody oscillator. Arch. Appl. Mech. 88(4), 563–571 (2018). https://doi.org/10.1007/s00419-017-1327-9
Weber, W.E., Zastrau, B.W.: Model order reduction of Mikota’s vibration chain including damping effects by means of proper orthogonal decomposition. J. Theor. Appl. Mech. 56(2), 511–521 (2018). https://doi.org/10.15632/jtam-pl.56.2.511
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Müller, P.C., Weber, W.E. Modal analysis and insights into damping phenomena of a special vibration chain. Arch Appl Mech 91, 2179–2187 (2021). https://doi.org/10.1007/s00419-020-01876-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-020-01876-z