
Abstract
Arrays of obstacles are a potentially effective measure to manage a channel landslide run-out deposit. In this research, three kinds of debris sands with different particle sizes, 0.25–0.5 mm, 1–2 mm and 2–5 mm respectively, are investigated in a 4.28-m-long chute with a fixed incline angle of 40°. Structure from motion (SfM) and other novel image analysis techniques are proposed to analyse the deposits’ characteristics, including time histories. These allow measuring accurately the run-out distance, width, 3D topography and area of the deposits which are used to assess the effectiveness of the obstacles to manage run-out deposits efficiently. Experimental results reveal that particle size has a significant impact on the final deposition because they effectively behave as three different rheology characteristics: viscous (fine), frictional (medium) and collisional (coarse). The observations show emerging shape properties that are characterised, as well as surprising behaviours when considering time histories such as the non-monotonic area growth in fine, or viscous, landslides. Other phenomena such as airborne particle jets are observed for the coarse particle size, representing a collisional-type flow. In practical terms, the experiments show that when designing protection barriers, a compromise is needed between length, width and depth of deposition and that this can only be decided based on the structure to be protected.














Similar content being viewed by others

References
Albaba A, Lambert S, Nicot F, Chareyre B (2015) Relation between microstructure and loading applied by a granular flow to a rigid wall using DEM modeling. Granul Matter 17(5):603–616. https://doi.org/10.1007/s10035-015-0579-8
Alfieri L, Salamon P, Pappenberger F, Wetterhall F, Thielen J (2012) Operational early warning systems for water-related hazards in Europe. Environ Sci Pol 21(08):35–49. https://doi.org/10.1016/j.envsci.2012.01.008
Ashwood W, Hungr O (2016) Estimating total resisting force in flexible barrier impacted by a granular avalanche using physical and numerical modeling. Can Geotech J 53(10):1700–1717. https://doi.org/10.1139/cgj-2015-0481
Baum RL, Godt JW (2010) Early warning of rainfall-induced shallow landslides and debris flows in the USA. Landslides 7(3):259–272. https://doi.org/10.1007/s10346-010-0204-1
Bi Y, Du Y, He S, Sun X, Wang D, Li X, Liang H, Wu Y (2018) Numerical analysis of effect of baffle configuration on impact force exerted from rock avalanches. Landslides 15(5):1029–1043. https://doi.org/10.1007/s10346-018-0979-z
Bi Y, He S, Du Y, Shan J, Yan S, Wang D, Sun X (2019) Numerical investigation of effects of “baffles-deceleration strip” hybrid system on rock avalanches. J Mt Sci 16(2):414–427. https://doi.org/10.1007/s11629-018-4908-3
Bugnion L, McArdell BW, Bartelt P, Wendeler C (2012) Measurements of hillslope debris flow impact pressure on obstacles. Landslides 9(2):179–187. https://doi.org/10.1007/s10346-011-0294-4
Caccamo P, Chanut B, Faug T, Bellot H, Naaim-Bouvet F (2012) Small-scale tests to investigate the dynamics of finite-sized dry granular avalanches and forces on a wall-like obstacle. Granul Matter 14(5):577–587. https://doi.org/10.1007/s10035-012-0358-8
Cantarino I, Carrion MA, Goerlich F, Ibañez VM (2019) A ROC analysis-based classification method for landslide susceptibility maps. Landslides 16(2):265–282. https://doi.org/10.1007/s10346-018-1063-4
Capparelli G, Tiranti D (2010) Application of the MoniFLaIR early warning system for rainfall-induced landslides in Piedmont region (Italy). Landslides 7(4):401–410. https://doi.org/10.1007/s10346-009-0189-9
Capparelli G, Versace P (2011) FLaIR and SUSHI: Two mathematical models for early warning of landslides induced by rainfall. Landslides 8(1):67–79. https://doi.org/10.1007/s10346-010-0228-6
Casagli N, Catani F, Del Ventisette C, Luzi G (2010) Monitoring, prediction, and early warning using ground-based radar interferometry. Landslides 7(3):291–301. https://doi.org/10.1007/s10346-010-0215-y
Caviedes-Voullième D, Juez C, Murillo J, García-Navarro P (2014) 2D dry granular free-surface flow over complex topography with obstacles. Part I: experimental study using a consumer-grade RGB-D sensor. Comput Geosci 73:177–197. https://doi.org/10.1016/j.cageo.2014.09.009
Choi CE, Ng CWW, Song D, Kwan JHS, Shiu HYK, Ho KKS, Koo RCH (2014) Flume investigation of landslide debris–resisting baffles. Can Geotech J 51(5):540–553. https://doi.org/10.1139/cgj-2013-0115
Choi CE, Ng CWW, Goodwin GR, Liu LHD, Cheung WW (2016) Flume investigation of the influence of rigid barrier deflector angle on dry granular overflow mechanisms. Can Geotech J 53(10):1751–1759. https://doi.org/10.1139/cgj-2015-0248
Choi CE, Cui Y, Liu LHD, Ng CWW, Lourenço SDN (2017) Impact mechanisms of granular flow against curved barriers. Géotech Lett 7(4):330–338. https://doi.org/10.1680/jgele.17.00068
Choi SK, Lee JM, Kwon TH (2018) Effect of slit-type barrier on characteristics of water-dominant debris flows: small-scale physical modeling. Landslides 15(1):111–122. https://doi.org/10.1007/s10346-017-0853-4
Chou SH, Lu LS, Hsiau SS (2012) Dem simulation of oblique shocks in gravity-driven granular flows with wedge obstacles. Granular Matter 14:719–732. https://doi.org/10.1007/s10035-012-0371-y
Corominas J (1996) The angle of reach as a mobility index for small and large landslides. Can Geotech J 33(2):260–271. https://doi.org/10.1139/t96-005
Cui X, Gray JMNT (2013) Gravity-driven granular free-surface flow around a circular cylinder. J Fluid Mech 720:314–337. https://doi.org/10.1017/jfm.2013.42
Cuomo S, Moretti S, Aversa S (2019) Effects of artificial barriers on the propagation of debris avalanches. Landslides 16(6):1077–1087. https://doi.org/10.1007/s10346-019-01155-1
Davide M, Oldrich H (2010) Analysis of run-up of granular avalanches against steep, adverse slopes and protective barriers. Can Geotech J 47(8):827–841. https://doi.org/10.1139/T09-143
De Haas T, Braat L, Leuven JRFW, Lokhorst IR, Kleinhans MG (2015) Effects of debris flow composition on runout, depositional mechanisms, and deposit morphology in laboratory experiments. J Geophys Res Earth Surf 120(9):1949–1972. https://doi.org/10.1002/2015JF003525
Faug T (2015) Depth-averaged analytic solutions for free-surface granular flows impacting rigid walls down inclines. Phys Rev E 92:062310. https://doi.org/10.1103/PhysRevE.92.062310
Gray JMNT, Tai YC, Noelle S (2003) Shock waves, dead zones and particle-free regions in rapid granular free-surface flows. J Fluid Mech 491:161–181. https://doi.org/10.1017/s0022112003005317
Guo Z, Yin K, Gui L, Liu Q, Huang F, Wang T (2019) Regional Rainfall Warning System for Landslides with Creep Deformation in Three Gorges using a Statistical Black Box Model. Sci Rep 9:8962. https://doi.org/10.1038/s41598-019-45403-9
Hákonardóttir KM (2004) The Interaction Between Snow Avalanches and Dams. University of Bristol, School of Mathematics, Bristol, England (PhD Thesis)
Hákonardóttir KM, Hogg AJ, Batey J, Woods AW (2003a) Flying avalanches. Geophys Res Lett 3(23):191. https://doi.org/10.1029/2003GL018172
Hákonardóttir KM, Hogg AJ, Johannesson T, Tomasson GG (2003b) A laboratory study of the retarding effects of braking mounds on snow avalanches. J Glaciol 49(165):191–200. https://doi.org/10.3189/172756503781830692
Hákonardóttir KM, Hogg AJ, Johannesson T, Kren M, Tiefenbacher F (2003c) Large-scale avalanche braking mound and catching dam experiments with snow: a study of the airborne jet. Surv Geophys 24(5-6):543–554. https://doi.org/10.1023/B:GEOP.0000006081.76154.ad
Hungr O, Evans SG (2004) Entrainment of debris in rock avalanches: an analysis of a long run-out mechanism. Bull Geol Soc Am 116(9-10):1240–1252. https://doi.org/10.1130/B25362.1
Hutter K, Svendsen B, Rickenmann D (1994) Debris flow modeling: a review. Contin Mech Thermodyn 8(1):1–35. https://doi.org/10.1007/BF01175749
Intrieri E, Gigli G, Mugnai F, Fanti R, Casagli N (2012) Design and implementation of a landslide early warning system. Eng Geol 147–148:124–136. https://doi.org/10.1016/j.enggeo.2012.07.017
Iverson RM (1997) The physics of debris flows. Rev Geophys 35(3):245–296. https://doi.org/10.1029/97RG00426
Iverson RM (2000) Landslide triggering by rain infiltration. Water Resour Res 36(7):1897–1910. https://doi.org/10.1029/2000WR900090
Iverson RM, Reid ME, LaHusen RG (1997) Debris-flow mobilization from landslides. Annu Rev Earth Planet Sci 25(1):85–138. https://doi.org/10.1146/annurev.earth.25.1.85
Jiang YJ, Wang ZZ, Song Y, Xiao SY (2018) Cushion layer effect on the impact of a dry granular flow against a curved rock shed. Rock Mech Rock Eng 51(7):2191–2205. https://doi.org/10.1007/s00603-018-1478-1
Johannesson T, Gauer P, Issler D, Lied K (2009) In: Barbolini M, Domaas U, Harbitz CB, Johannesson T, Gauer P, Issler D, Lied K, Faug T, Naaim M (eds) The design of avalanche protection dams. Recent Practical and Theoretical Developments. European Commission. Directorate General for Research
Kattel P, Kafle J, Fischer JT, Mergili M, Tuladhar BM, Pudasaini SP (2018) Interaction of two-phase debris flow with obstacles. Eng Geol 242:197–217. https://doi.org/10.1016/j.enggeo.2018.05.023
Law RPH, Choi CE, Ng CWW (2016) Discrete-element investigation of influence of granular debris flow obstacles on rigid barrier impact. Can Geotech J 53(1):179–185. https://doi.org/10.1139/cgj-2014-0394
Leonardi A, Wittel FK, Mendoza M, Vetter R, Herrmann HJ (2016) Particle–fluid–structure interaction for debris flow impact on flexible barriers. Comput Aided Civil Infrastruct Eng 31(5):323–333. https://doi.org/10.1111/mice.12165
Leroueil S (2001) Natural slopes and cuts: Movement and failure mechanisms. Geotechnique 51(3):197–243. https://doi.org/10.1680/geot.2001.51.3.197
Liao Z, Hong Y, Wang J, Fukuoka H, Sassa K, Karnawati D, Fathani F (2010) Prototyping an experimental early warning system for rainfall-induced landslides in Indonesia using satellite remote sensing and geospatial datasets. Landslides 7(3):317–324. https://doi.org/10.1007/s10346-010-0219-7
Luong TH, Baker JL, Einav I (2020) Spread-out and slow-down of granular flows through model forests. Granul Matter 22:15. https://doi.org/10.1007/s10035-019-0980-9
Mast CM, Arduino P, Miller GR, Mackenzie-Helnwein P (2014) Avalanche and landslide simulation using the material point method: flow dynamics and force interaction with structures. Comput Geosci 18:817–830. https://doi.org/10.1007/s10596-014-9428-9
Michoud C, Bazin S, Blikra LH, Derron MH, Jaboyedoff M (2013) Experiences from site-specific landslide early warning systems. Nat Hazards Earth Syst Sci 13(10):2659–2673. https://doi.org/10.5194/nhess-13-2659-2013
Milne FD, Brown MJ, Davies MCR, Cameron G (2015) Some key topographic and material controls on debris flows in scotland. Q J Eng Geol Hydrogeol 48:212–223. https://doi.org/10.1144/qjegh2013-095
Montrasio L, Valentino R (2004) Experimental and numerical analysis of impact forces on structures due to a granular flow. WIT Trans Ecol Environ 77:267–276
Ng CWW, Choi CE, Kwan JSH, Koo RCH, Shiu HYK, Ho KKS (2014) Effects of Baffle Transverse Blockage on Landslide Debris Impedance. Procedia Earth Planet Sci 9(3):3–13. https://doi.org/10.1016/j.proeps.2014.06.012.
Ng CWW, Choi CE, Song D, Kwan JHS, Koo RCH, Shiu HYK, Ho KKS (2015) Physical modeling of baffles influence on landslide debris mobility. Landslides 12(1):1–18. https://doi.org/10.1007/s10346-014-0476-y
Osanai N, Shimizu T, Kuramoto K, Kojima S, Noro T (2010) Japanese early-warning for debris flows and slope failures using rainfall indices with Radial Basis Function Network. Landslides 7(3):325–338. https://doi.org/10.1007/s10346-010-0229-5
Park JY, Lee SR, Lee DH, Kim YT, Lee JS (2019) A regional-scale landslide early warning methodology applying statistical and physically based approaches in sequence. Eng Geol 260:105193. https://doi.org/10.1016/j.enggeo.2019.105193
Pudasaini SP, Hutter K, Hsiau SS, Tai SC, Wang Y, Katzenbach R (2007) Rapid flow of dry granular materials down inclined chutes impinging on rigid walls. 19(5):053302. https://doi.org/10.1063/1.2726885
Sassa K, Tsuchiya S, Ugai K, Wakai A, Uchimura T (2009) Landslides: a review of achievements in the first 5 years (2004–2009). Landslides 6(4):275. https://doi.org/10.1007/s10346-009-0172-5
Sassa K, Tsuchiya S, Fukuoka H, Mikos M, Doan L (2015) Landslides: review of achievements in the second 5-year period (2009–2013). Landslides 12(2):213–223. https://doi.org/10.1007/s10346-015-0567-4
Tang C, Zhu J, Ding J, Cui X, Chen L, Zhang J (2011) Catastrophic debris flows triggered by a 14 August 2010 rainfall at the epicenter of the Wenchuan earthquake. Landslides 8(4):485–497. https://doi.org/10.1007/s10346-011-0269-5
Teufelsbauer H, Wang Y, Chiou MC, Wu W (2009) Flow-obstacle interaction in rapid granular avalanches: DEM simulation and comparison with experiment. Granul Matter 11(4):209–220. https://doi.org/10.1007/s10035-009-0142-6
Tiranti D, Rabuffetti D (2010) Estimation of rainfall thresholds triggering shallow landslides for an operational warning system implementation. Landslides 7(4):471–481. https://doi.org/10.1007/s10346-010-0198-8
Valentino R, Barla G, Montrasio L (2008) Experimental analysis and micromechanical modelling of dry Granular flow and impacts in laboratory flume tests. Rock Mech Rock Eng 41(1):153–177. https://doi.org/10.1007/s00603-006-0126-3
Wang F, Chen X, Chen J (2017a) Experimental study on the energy dissipation characteristics of debris flow deceleration baffles. J Mt Sci 14(10):1951–1960. https://doi.org/10.1007/s11629-016-3868-8
Wang F, Chen X, Chen J, You Y (2017b) Experimental study on a debris-flow drainage channel with different types of energy dissipation baffles. Eng Geol 220:43–51. https://doi.org/10.1016/j.enggeo.2017.01.014
Westoby MJ, Brasington J, Glasser NF, Hambrey MJ, Reynolds JM (2012) ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 179:300–314. https://doi.org/10.1016/j.geomorph.2012.08.021
Yang H, Cheng J (2017) Experimental investigation on the interaction between the rapid sliding body and exposed element. Environ Earth Sci 76(6):258. https://doi.org/10.1007/s12665-017-6565-1
Yin Y, Wang H, Gao Y, Li X (2010) Real-time monitoring and early warning of landslides at relocated Wushan Town, the Three Gorges Reservoir, China. Landslides 7(3):339–349. https://doi.org/10.1007/s10346-010-0220-1
Funding
This study was financially supported by the key program of the National Natural Science Foundation of China (Grant No. 41530639), the Cultivation Program for Excellent Doctoral Dissertation of Southwest Jiaotong University (Grant No. D-YB201702) and the program of China Scholarships Council (No.201707000160).
Author information
Authors and Affiliations
Corresponding authors
Appendix. Image processing
Appendix. Image processing
I. Topography of the deposit
A 3D topographical map of the deposited material was reconstructed using the software Context Capture. The software uses structure from motion (SfM), where a series of images are captured around the debris depositions to form the basis for the 3D reconstruction. The positions and orientations of the camera in each photograph are recovered from known control points in the object. Once recovered, a point cloud can be built from multiple observations by using common points between photographs. For a full explanation, SfM is fully described in Westoby et al. (2012).
It is important to note though that the resulting point cloud is to an arbitrary scale and therefore needs to be scaled to the real-world scale. This was achieved by using the known dimensions of a grid printed on the surface of the run-out plate. The reconstructions were carried out using between 100 and 130 images in NEF format captured with a NIKON D7000 with a fixed focal length.
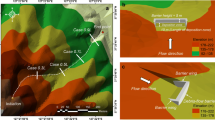
The accuracy of the reconstructed 3D maps was checked using the known height of the obstacles installed on the run-out plate as shown in Fig. 13. Checks were not done in DAL because the obstacles were totally buried due to their reduced height. On the other hand, checking the accuracy against the RA and DAH arrangements was considered sufficient as the material, lighting and all other conditions remained the same in the DAL case. The accuracy results are shown in Table 5. The heights of the piles are in the range of 78.56–81.87 mm or − 1.80% to + 2.34% from the actual 80-mm height. The worst-case scenario shows therefore an error of 4.68 mm. The average measurement and accuracy are respectively 80.25 mm and 0.31% (or 0.62 mm).

Reconstructed 3D maps in case of Obstacle1-Fine
II. Area of the deposit
In order to determine the area of the debris flow, the deposition was measured using a binarization process of images in camera C1 in Matlab as shown in Fig. 14, where we are taking the OF Coarse case as an example.

Whole process of the image segmentation (OF-Coarse)
At first, the original image (Fig. 14a) was cropped to the area of interest (Fig. 14b) removing surrounding objects. Then, the effect of the ambient light was effectively removed by a matrix operation where the pixel value matrix of the current image subtracts the first image’s directly to get a pre-processed image (Fig. 14c).
After that, a binarizing threshold was determined by trial-and-error by comparing the contoured line of the reconstructed images to the final image. The binarization of the image was implemented by the function im2bw and the chosen threshold values for all cases are listed in Table 6. The resulting image had holes due to the high threshold used to remove other areas, as shown in Fig. 14d that were filled using the function imfill (Ithresh, ‘hole’) as shown in Fig. 14e. Then, the small scattered points, representing isolated grains in Fig. 14e were removed using the function imopen to obtain the final segmentation shown in Fig. 14f. Moreover, the edge of the segmented deposition was finally smoothed using imopen in the shape of a disk with the diameter of 3 pixels.
III. Length and width of deposit
In order to measure the length and width of the depositing area, two critical characteristics of the deposition, the pixel distribution along a designated line in images obtained by camera NIKON D7000 was used to detect the boundary of the deposition accurately. Although the previous segmentation could have provided the same, it requires trial and error and therefore, this novel method was chosen to provide repeatability in the detection method between all the different runs. The process is shown in Fig. 15 for the DAL-fine case as an example. The figure shows the original photograph and the selected Observation window that covers the deposition boundary at its final position. The latter is selected by hand with the only condition that the window must include the boundary. First, a Matlab code is used to rectify the image as shown in Fig.15b, i.e. create a view perpendicular to the camera principal axis so that undistorted measurements can be taken. The four white circles marked in the images are reference points and were picked to form a rectangle using the grid in the deposition area. The grid gives their position which is then used for the image rectification.

Determination method of a deposition’s boundary. a Original image. b Rectified image. c Calculation of the front boundary (Xfb) in observation window
Figure 15c shows the grey pixel value versus length for points along the red Designated line shown in Fig. 6a and b, over the distance defined in the detailed window calculated using the Matlab function, improfile. The red line in Fig. 15c represents the backbone line of the original pixel distribution shown as a blue solid line. It clearly shows two distinct zones: one with deposited material and greater grey pixel values and one without material. The boundary of the deposit is then identified by the change in grey pixel value from the outside (Pgout) to the inside of the deposition material (Pgin) and is detected at the grey pixel value of 0.5ΔP (where ΔP = Pgout - Pgin). This intersects the backbone line at a value of xfb in the x-axis shown in the figure as D′. In order to turn the graph distance to the experiment’s dimensions from the Observation window, a control point (Xc) and the starting point of the designated line (X0) are used.
IV. Measurement of natural angle of repose
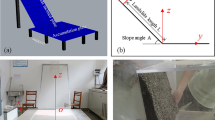
The natural angle of repose was measured as shown in Fig. 16a. A funnel is installed on a fixed top plate with a fixed height. The deposit disk whose diameter is 10cm is installed on the ground plate and keeps vertical aligned with the axis of the funnel. Before the test, the fixed top plate should keep horizontal, which was calibrated by a levelling instrument and 4 adjustable columns. In addition, a plumb line checked the vertical relation between funnel and deposit disk, see Fig. 16b. Final deposit was displayed in Fig. 16c and the angle’s measurement was shown in Fig. 16d. In order to reduce the operational errors, each test was repeated 5 times and obtained the average as the final value.

Measurement procedure of natural angle of repose. a Measuring device. b Vertical calibration. c Final deposit. d Measurement
Rights and permissions
About this article

Cite this article
Yan, K., He, J., Cheng, Q. et al. Experimental investigation on the interaction between rapid dry gravity-driven debris flow and array of obstacles. Landslides 18, 1761–1778 (2021). https://doi.org/10.1007/s10346-020-01614-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10346-020-01614-0